
一种红外经纬仪-雷达引导方法的设计与研究*
2024-04-16 12:19:00迟明祎陈爽爽魏炳捷王家永
火力与指挥控制 2024年3期
迟明祎,陈爽爽,魏炳捷,王家永,周 磊
(解放军63861 部队,吉林 白城 137001)
0 引言
光学红外经纬仪和弹道雷达都是重要的靶场测量设备,主要用于各类导弹、火箭弹外弹道测试测量任务。光电经纬仪具有高精度、宽视场和多目标跟踪识别等优势[1-2],目标出炮口即跟踪,但是随着目标飞行距离渐远、火焰渐弱或云层遮挡,目标在经纬仪视场中的成像质量逐渐变低,自动跟踪和手动跟踪均难以辨识,故经纬仪的探测距离有限[3-4],主要用于主动段坐标测量。雷达测量系统主动段因地表杂波影响、脉冲反应时间不够、布站远作用距离较长等因素的制约,通常在目标飞行达到一定高度以后才能捕获目标[5],与光学经纬仪相比,雷达系统定位精度略低[4],但跟踪距离远,所以弹道雷达主要用于中后段坐标测量。针对上述问题,本文提出一种经纬仪-雷达协同跟踪测量策略,即目标出离主动段由双侧布站的两套经纬仪自动跟踪,实时粗略解算目标空间位置,通过通讯链路发送至雷达控制程序,根据目标空间坐标和雷达站址,实时解算出雷达照射数据:方位、俯仰和距离(A,E,R)引导雷达,实现雷达在目标出离之后短时间内即捕获目标,增长雷达有效数据段长度。其工作原理如图1所示。

图1 经纬仪-雷达引导示意图Fig.1 Schematic diagram of theodolite-radar guidance
1 传统的经纬仪事后交会
经纬仪对空中目标的坐标交会解算通常在事后进行。在目标提取过程中,需要叠加两个因素:1)经纬仪的指向值,即经纬仪视轴对空角度值(方位和俯仰)(A,E);2)目标的像面坐标(x,y)换算成目标亮度中心偏离经纬仪视轴的角度值。经纬仪具有一定的视场角,目标并未在经纬仪视轴上(即视场中心)成像,所以需要通过目标提取解算出目标偏离经纬仪视轴的角度值。经纬仪视轴的角度与目标偏离视轴的角度二者叠加即得到目标的实测角度,如图2 所示。

图2 目标视场成像示意图Fig.2 Schematic diagram of imaging of target field of view
而像面坐标提取通常采用图像细分方法[6-7],如图3、下页图4 所示,目标在画面中占有若干个像素,像素灰度值的不同决定该像素参与目标提取计算的权重,最后得到综合了多个不同灰度值像素点的目标角度值,从而达到较高的提取精度。
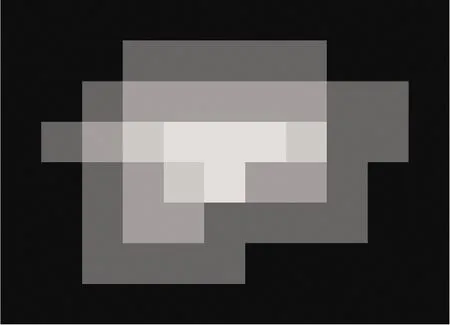
图3 经纬仪对某亮目标拍摄像素图Fig.3 Pixel map of a light target shot by theodolite
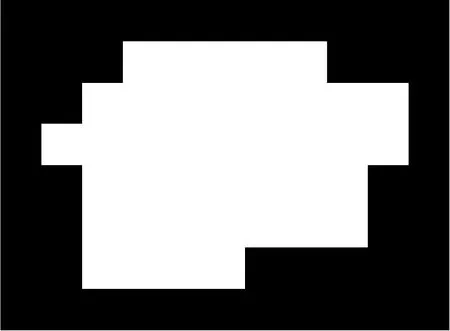
图4 像面提取中参与计算的像素点Fig.4 Pixel points of calculation during image extraction
在已知经纬仪视轴角度(AZX,EZX)和目标的像面坐标(x,y),可通过式(1)计算目标相对于经纬仪成像中心的相对角度位置,即经纬仪对目标的测角值[1,8],为:
其中,α 为经纬仪方位测角值;β 为经纬仪高低测角值;x 为水平方向像面坐标;y 为垂直方向像面坐标;f 为经纬仪主距;A 为经纬仪视轴的方位角;E 为经纬仪视轴的高低角。
在事后交会计算中,按照此法分别提取同一时刻下左右两侧经纬仪对同一目标的测角值。已知两侧经纬仪的站址坐标,交会计算得到该时刻目标的空间坐标,对每一时刻重复上述步骤,即得到目标随时间的飞行轨迹。上述步骤决定了经纬仪高精度解算目标空间位置的过程需要事后进行且需要一定的周期,但在本文中,需要实时解算并发送至雷达控制程序,传统的高精度提取目标点的方法不再适用,针对如何实时得到交会结果的问题,考虑到雷达搜索波束范围较宽,具有一定的容错能力,本文提出初始段自动跟踪模式下,基于双侧经纬仪视轴指向值实时交会的空间位置解算方法,方法流程步骤如图5 所示。

图5 经纬仪-雷达引导方法流程Fig.5 Flow chart of theodolite-radar guidance method
2 经纬仪实时交会解算
通过对现有经纬仪自动跟踪响应曲线的分析可知,目标出离瞬间火焰较亮,对背景的对比度较高,采用经纬仪自动跟踪模式在0.3 s 内即可捕获,随即将目标保持在视场正中心持续稳定跟踪,此种条件下,目标的像面坐标近似为0,目标相对于经纬仪的角度近似等于经纬仪视轴的角度,即经纬仪方位和俯仰编码器值。因此,本文采用基于视轴角度即编码器值交会的实时坐标解算方法,省略像面坐标提取的环节,实现实时坐标解算目的。
事先双侧经纬仪设置合适的捕获亮度阈值,目标出离时采用自动跟踪,两侧经纬仪将目标保持在视轴上,镜头稳定平滑跟随目标移动。
采用局部三维右手直角坐标系,设左站站址为(x1,y1,z1),右站站址为(x2,y2,z2)。
t1时刻下,经纬仪视轴的指向角可通过编码器读出,从而计算出视轴所在直线l1的方向向量(a,b,c),那么左侧经纬仪视轴所在的空间射线为:
同理,直线l2的方向向量为(m,n,l),那么右侧经纬仪视轴所在的空间射线为:
由于实际存在误差,l1和l2并不相交,即空间异面直线。对此,选择空间异面直线公垂线的中点作为交会点,设l3为两条空间异面直线的公垂线,l3与l1的交点为,l3与l2的交点为,当两点的距离趋于最小值,即存在[9-10]:
得到t1时刻实时解算的目标空间坐标。
3 雷达照射参数解算
通过经纬仪编码器指向值实时交会得到目标空间坐标,通过局域网通信链路发送至雷达控制主程序,在同一个局部右手坐标系下,以t1时刻为例,已知目标坐标(xt1,yt1,zt1),雷达站址为(x3,y3,z3),在主程序中计算出雷达定位的3 个基本要素:方位A、俯仰E 和距离R,如式(6)[4,11]:
目标出离后的初始段,以(A,E,R)引导雷达指向预定空域并在预定空域搜索目标,可极大增加目标捕获的概率,于短时间内在波束内发现目标,待其发现并锁定目标后即可切断经纬仪引导。此时经纬仪操作人员视情继续保持红外自动跟踪,如目标减弱自动跟踪存在丢失风险时(此时目标角速度已经降低),可根据需要切换单杆手动跟踪。
目标飞行中后段,由于弹丸火焰较弱或云层遮挡,目标成像质量降低,人眼借助跟踪电视难以辨别目标,随时有丢失风险时,因雷达跟踪距离较远且通常能够跟踪到目标落地,所以,飞行中后段可视情采用雷达- 经纬仪引导使经纬仪继续记录数据供事后数据处理。
4 雷达-经纬仪引导
中后段,以t2时刻为例,雷达将目标位置以(xt2,yt2,zt2)的格式通过局域网通信链路发送至双侧经纬仪控制主程序,对于左侧经纬仪,已知目标坐标(xt2,yt2,zt2)和经纬仪站址(x1,y1,z1),可求出目标与左经纬仪成像中心连线的方向向量:
进而可计算出左侧经纬仪的方位和俯仰角度(A1t2,E1t2),通过伺服电机控制经纬仪指向预定空域。同理,右侧经纬仪在伺服电机的控制下指向角度为(A2t2,E2t2)的预定空域。因雷达引导具有一定的定位误差,发送的引导数据经过解算角度有所偏差,但由于经纬仪具有一定角度宽视场的优势,可以保证目标被包括在视场内(即并不在像面中心)。
中后段雷达- 经纬仪引导的意义在于:在事后数据处理中,通过图像比例放大和高低位图切换,可以逐帧对微弱目标的像面坐标进行提取,通过交会计算得到目标的空间位置,在没有雷达引导的情况下,只能测试初始段目标飞行航迹,在有雷达引导的条件下,极大增加了经纬仪有效数据段的长度。
5 实验验证
基于现有的有限条件对论文提出的经纬仪-雷达引导方法的可行性和有效性进行验证。
结合某飞行装置飞行任务开展实地实验,选取某型红外经纬仪两台置于天文圆顶,具有较好的地基稳定性。布站如图6 所示,目标起飞点距离雷达约3.5 km,距离经纬仪左站2.2 km,距离右站1.5 km,经纬仪基线(两经纬仪间距)长度2.2 km,交会角71°,符合要求。事前对双侧经纬仪和雷达的站址进行高精度大地测量。
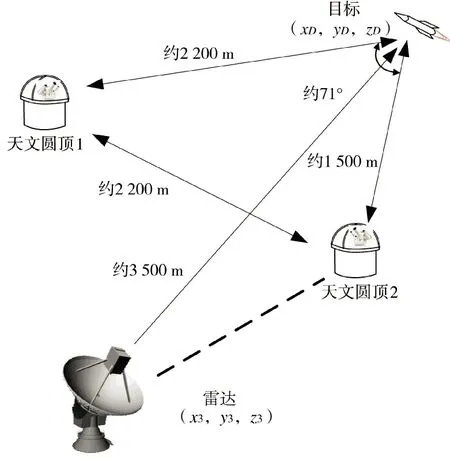
图6 动态引导布站图Fig.6 Dynamic guidance station layout diagram
经纬仪跟踪电视设置合适的套取阈值,目标起飞后,经纬仪开启自动跟踪,目标在视场中心成像,如图7 所示。将右站经纬仪编码器值(t,AZX2,EZX2)通过通信链路发送至左站,与左站编码器值(t,AZX1,EZX1)在左站经纬仪控制程序上完成实时交会得到目标坐标(t,xt1,yt1,zt1),发送至雷达主控程序,解算出雷达的预置照射方向(t,A,E,R),雷达开始搜索目标,记录雷达搜索结果。结合飞行任务,累计飞行6次,雷达均能在3 s 内够捕获目标,本文提出的方法经实地验证可行。
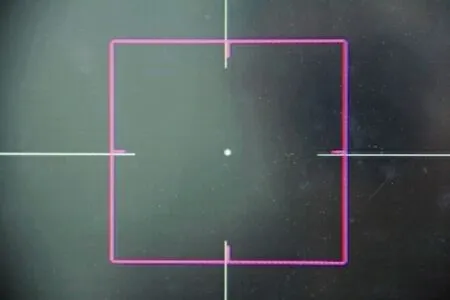
图7 目标成像图Fig.7 Target imagining map
本文提出的实时交会空间位置解算方法的关键在于两点:1)初始段经纬仪能否将目标套住并保持在视场中心;2)以经纬仪视轴进行实时交会引导带来的误差应当满足跟踪要求。通过合理的阈值设定并预先以信号弹为动目标进行试跟,可以保证目标出离即锁定并保持目标在视场中心。而经纬仪视轴实时交会引导的误差主要有两个来源:一是实时交会误差,二是延时误差。由前面的论述可知,基于视轴指向值实时交会的过程认定目标亮度中心位于视场中心,即像面脱靶量为0,由式(1)可知,当像面脱靶量(x,y)为0 时,经纬仪对目标的测角值等于视轴的角度值,而实际上像面脱靶量近似为0,此外还受经纬仪三差、交会误差等的影响。下面针对以经纬仪指向值(编码器值)代替目标角度值进行实时交会的误差进行检测。
采用视场角为20°×20°的某型弹道相机两台作为比对设备,分别置于左右两侧的天文圆顶,相机采用凝视状态,与经纬仪同时测试飞行目标,二者采用统一的授时。事后交会得到0.5~5 s 时间段内的目标飞行轨迹数据,根据莱以特3σ 准则剔除异常值[12],记录经纬仪实时发送的坐标数据,剔除异常值。因两种设备的采样频率不同,选取同时刻下经纬仪数据与弹道相机数据进行比对。采用均方根误差RMSE 公式衡量各方向上误差的大小,RMSE误差公式为[13]:
比对结果如表1 所示。
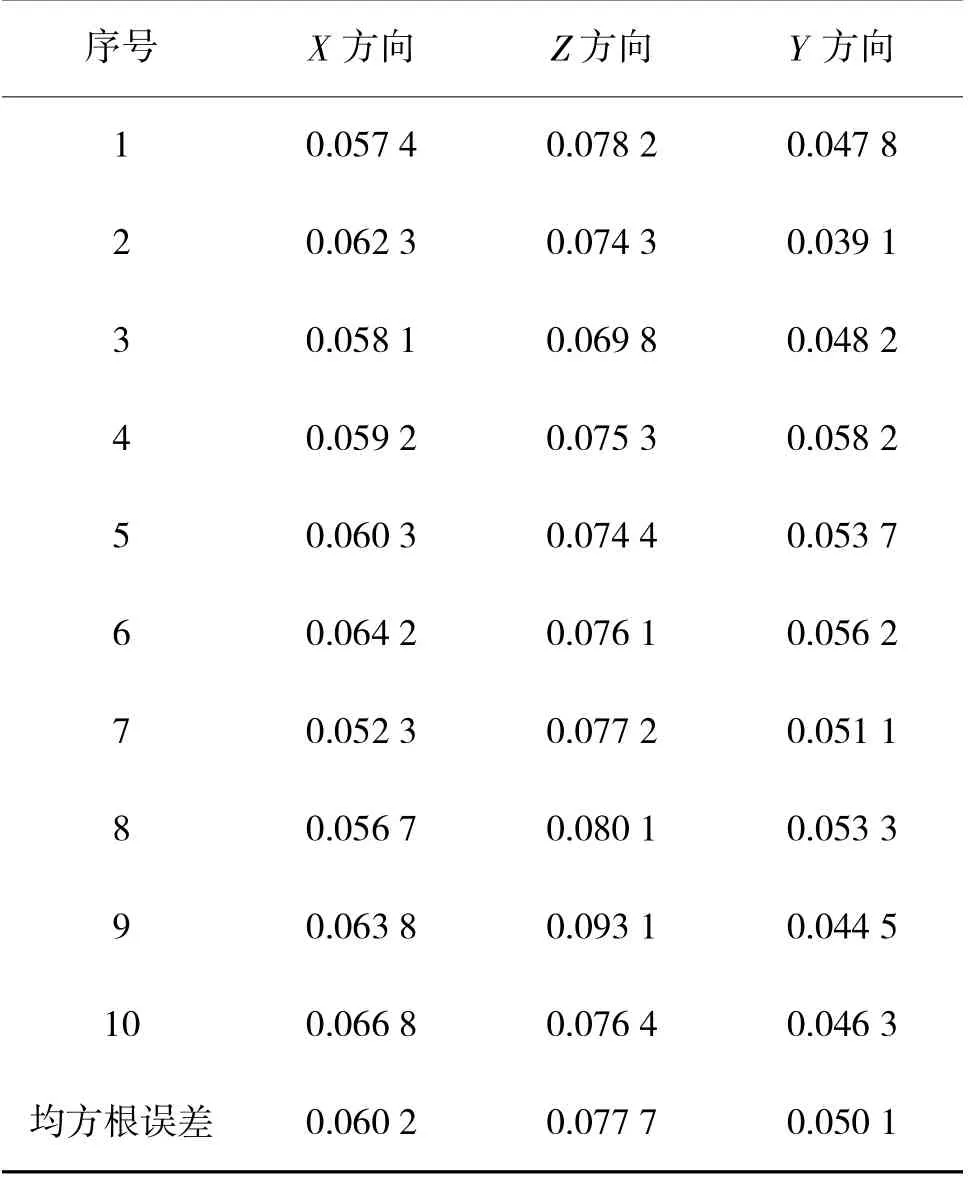
表1 误差比对Table 1 Error comparison
通过数据对比分析可知,Z 方向上的误差略大,X 和Y 方向(海拔高方向)上的误差略小,根据:
合并3 个方向的误差,粗略估算经纬仪实时交会结果偏离目标坐标真值的最大距离约为12 cm,对于雷达搜索波束在可接受的范围内,本文提出的方法可行。
下面对延时误差进行分析,延时有两个来源:一是经纬仪实时交会的计算延迟;二是目标的空间坐标通过通信链路发送至雷达控制计算机,通信造成的延迟。实时交会计算延迟即程序运行造成的延时可忽略不计,故影响主要表现在通信链路延迟。据检测结果,本文所采用的通信链路延迟保持在10 ~20 ms 之间,对某一出离运动速度在40~50 m/s之间的亮目标进行跟踪,以25 ms 为例进行计算,25 ms 内目标飞行约1.25 m,雷达作用距离为1 km时,偏离角度约为5';雷达作用距离为2 km 时,偏离角度约为2.2';雷达作用距离为3 km 时,偏离角度约为1.5',对于发散角1°左右的雷达来讲能够满足引导要求。为了进一步分析通信链路延迟对引导的影响,本文采用如下方法进行验证:
仍旧采用图6 所示的布站方式,经纬仪对某一出离运动速度在40~50 m/s 之间的亮目标进行跟踪,实时交会并发送坐标引导雷达捕获目标,此时经纬仪中断数据发送,雷达发送数据引导经纬仪转动,实验结果为:目标仍旧保持在经纬仪视场中但略有偏离,左站作用距离2.2 km,目标偏离视场中心的角度大约为5';右站作用距离1.5 km,目标偏离视场中心的角度约1/10 视场,约为12',对于2°×2°视场的经纬仪能够满足跟踪要求。此外,本文提出的经纬仪- 雷达引导策略主要用于初始段的目标捕获,目标在较短距离加速过程后的初速通常不高,故可以满足一般目标出离捕获的需求。
对于引导延迟带来的影响,可采用基于包数据交换协议(PDXP)的通信方式[14],首先,数据包发送后会收到回执;其次,在统一的授时下,数据包接收方会收到发送方的发送时刻,从而计算得到准确延时,方便被引导方进行弹道外推修正引导数据,从而克服远距离引导跟踪时延时所带来的显著影响。
6 结论
针对弹道雷达在目标飞行初始段难以短时间捕获目标的问题,本文提出一种在弹道坐标测试过程中,主动段光学经纬仪引导弹道雷达跟踪目标,中末段弹道雷达引导经纬仪继续成像的经纬仪-雷达协同跟踪策略,克服单一传感器的局限和不足。提出初始段自动跟踪模式下的基于双侧经纬仪视轴指向值实时交会的空间位置解算方法,实现空中目标位置的快速解算。基于现有条件,进行了经纬仪- 雷达引导实验验证并开展与某型弹道相机交会结果的比对,验证了方法的可行性和有效性,可有效协助雷达在目标出离后短时间内捕获目标,增加了有效数据段的长度,为提升目跟踪标捕获率、促进多传感器数据融合和丰富靶场弹道坐标测量方法手段提供理论、方法的借鉴和参考。
猜你喜欢
宇航计测技术(2022年2期)2022-06-01 09:34:44
中国光学(2021年6期)2021-11-25 07:48:32
航空兵器(2020年5期)2020-12-03 00:55:56
中国医疗设备(2019年1期)2019-01-15 12:10:54
测控技术(2018年3期)2018-11-25 09:45:50
百科探秘·航空航天(2016年9期)2016-12-01 03:04:22
系统工程与电子技术(2016年7期)2016-08-21 13:58:56
重庆邮电大学学报(自然科学版)(2016年3期)2016-07-04 06:27:14
应用光学(2015年1期)2015-06-01 03:38:06
激光与红外(2015年10期)2015-03-23 06:07:18
