
基于神经-肌骨-外骨骼耦合仿真框架的平地和上坡行走动力学分析1)
2024-04-15 02:53:50刘佳奇张琦炜方虹斌
力学学报 2024年3期
靳 葳 刘佳奇 张琦炜 方虹斌 ,
* (复旦大学智能机器人研究院,上海 200433)
† (复旦大学义乌研究院,浙江义乌 322000)
** (同济大学航空航天与力学学院,上海 200092)
引言
外骨骼机器人作为一种通过与人的肢体进行交互,从而提供支持、辅助或保护的穿戴式机器人,近年来,在康复辅助、工业生产和军事作战等领域展现出巨大应用潜力[1-6].以康复辅助领域为例,步行辅助外骨骼根据当前步态和环境信息提供辅助支撑力或推进力,从而强化穿戴者,尤其是老年人或步态障碍患者的步行能力[7];被动外骨骼利用弹性元件储放能特性,实现穿戴者行走时的代谢耗能降低,并能增强步态失调患者行走的平衡性[8-10];而在恢复脊髓损伤患者的下肢运动能力方面,康复训练外骨骼也已被证明比传统治疗方法效果更佳[11].
对人穿戴外骨骼运动的评估,一直是外骨骼领域的研究重点之一.一方面,外骨骼硬件系统和控制方法是否可用、助力是否有效,需要外骨骼穿戴和运动测试进行验证;另一方面,人与外骨骼作为一个系统在运动过程中的动力学响应,也可作为外骨骼系统设计迭代、控制策略优化的依据.目前,对人穿戴外骨骼运动进行评估的途径主要是实验测试[12-14].这种方法能够较准确、直接地获得系统的运动动力学数据,因而被研究者们广泛使用.但基于实验的人-外骨骼系统评估也存在许多挑战:首先,外骨骼作为与人肢体进行直接交互的机器人,其微小的技术缺陷或故障都可能引发严重后果,这对硬件的安全性、控制的鲁棒性等提出了更高的要求[15];其次,外骨骼的硬件迭代、实验场地和配套测试设备成本昂贵,实验评估往往需要招募数名受试者进行多次实验,时间、人力和物力消耗大[16];同时,外骨骼应用环境和穿戴者的运动往往复杂多变,这也进一步增大了实验评估的难度[17].
为克服上述困难,可以对人-外骨骼耦合系统的运动进行动力学建模与仿真,从而在无需实验测试的条件下对人穿戴外骨骼的运动进行预测和评估.与实验测试相比,基于动力学仿真的方法能够大大降低评估的成本,提高外骨骼优化迭代的效率[18-20];以人体神经-肌骨-外骨骼耦合模型为基础的动力学仿真,还可以使研究者从肌肉激活、肌肉力和关节力矩等层面开展人体生物力学分析,而这些信号往往极难通过实验采集得到.Ferrati 等[21]基于Open-Sim 神经肌肉系统仿真平台建立了肌骨-外骨骼耦合模型并进行了行走动力学仿真,其中人体下肢髋、膝关节由5 组肌肉驱动,同时受到外骨骼施加的辅助力矩.Li 等[22]基于生物运动预测平台SCONE对肌骨-外骨骼耦合模型在平地和上坡行走的肌肉激活度进行了研究,其中人体下肢由7 组肌肉驱动.Farris 等[23]基于OpenSim 平台进行了踝关节外骨骼辅助下的跳跃运动中仿真,其中踝关节由4 组肌肉驱动.综合来看,面向肌骨-外骨骼耦合模型的动力学仿真研究目前还比较少,且主要聚焦于依托开源肌骨模型和成熟仿真平台进行的单一环境、单一动力学模型的动力学仿真;更重要的是,多数现有的人-外骨骼耦合动力学仿真研究仍需要实验测得的运动学或sEMG 信号作为仿真框架的输入,这使得其面对新的环境、任务或外骨骼硬件时受到掣肘[23-25].Geyer 等[26]观察了人步行时下肢的动力学响应规律,提出了基于神经肌肉反馈控制的行走机制,即人体受肌肉驱动产生运动,而人体的运动和肌肉的状态又作为反馈,影响下一时刻的肌肉活动.该方法从仿生和控制的角度对肌肉活动的机制进行了设计,实现高效和稳定的人体步态,并且摆脱了对实验数据的依赖.但这一仿真框架尚未广泛应用于人-外骨骼耦合的动力学仿真.总的来说,基于动力学仿真的人穿戴外骨骼运动评估尚处于起步阶段,特别是无实验输入的人体神经-肌骨-外骨骼耦合系统的动力学仿真尚属空白,其难点包括考虑肌骨-外骨骼的耦合系统建模、肌肉反馈机制的设计与参数优化和对复杂环境下仿真结果的分析等,相关研究水平仍然较低.
本研究的目的是利用无实验数据输入的人-外骨骼耦合系统仿真框架,进行不同环境下人穿戴外骨骼行走的动力学仿真,并尝试对仿真过程中的人体生理学和生物力学信号进行分析.在前期工作中,Jin 等[27]提出了考虑神经-肌骨-外骨骼耦合的行走动力学仿真框架,且无需实验数据的输入;本研究中,选取平地和上坡地形作为仿真用例,使用所提框架进行模型参数优化和动力学仿真.同时,开展了同样条件下的行走测试实验,并将仿真与实验的肌肉激活信号进行对比,分析在不同行走条件下人体下肢肌肉活动的变化规律,并验证在无实验数据输入条件下,基于人-外骨骼耦合系统动力学仿真进行人穿戴外骨骼行走评估的有效性.
本文的贡献在于,利用创新性建立的神经-肌骨-外骨骼耦合系统的动力学仿真框架,开展了不同环境下人体穿戴外骨骼行走的模型参数优化和动力学仿真,完善了无实验输入的人-外骨骼动力学优化和仿真方法;对仿真和实验中肌肉激活结果进行了对比分析,证明了基于所提仿真框架进行人-外骨骼运动评估的可行性和有效性,揭示了人体下肢肌肉的活动模式随不同行走条件的客观变化规律.
1 神经-肌骨-外骨骼耦合动力学仿真框架
1.1 框架概述
本研究拟开展的动力学仿真基于Jin 等[27]所提出的神经-肌骨-外骨骼耦合系统动力学仿真框架,考虑到工作的完整性,本章将首先对其进行简述.如图1所示,仿真框架包含肌肉动力学和刚体动力学两个子系统,其中肌肉动力学子系统包含神经肌肉反射、肌肉激活动力学、肌肉收缩动力学和肌骨几何关系计算等一切与肌肉相关的动力学过程;刚体动力学子系统则代表耦合系统多刚体动力学过程,且考虑了外骨骼助力、人-外骨骼交互作用和地面反作用力等因素.该框架的一个重要的创新点在于,在动力学仿真过程中,人体肌肉激活、肌肉力和关节力矩等信号不再由实验数据或时域下的直接优化结果给出,而是通过神经肌肉反射机制经由前向动力学逐步计算得到,这使得模型能够适应更复杂的环境且人体生理信号更贴近实际.神经肌肉反射机制中的参数将作为优化对象,以肌肉耗能、人体运动范围和地反力等为优化目标进行多目标优化,确保模型生成的步态更加符合生理学期望.
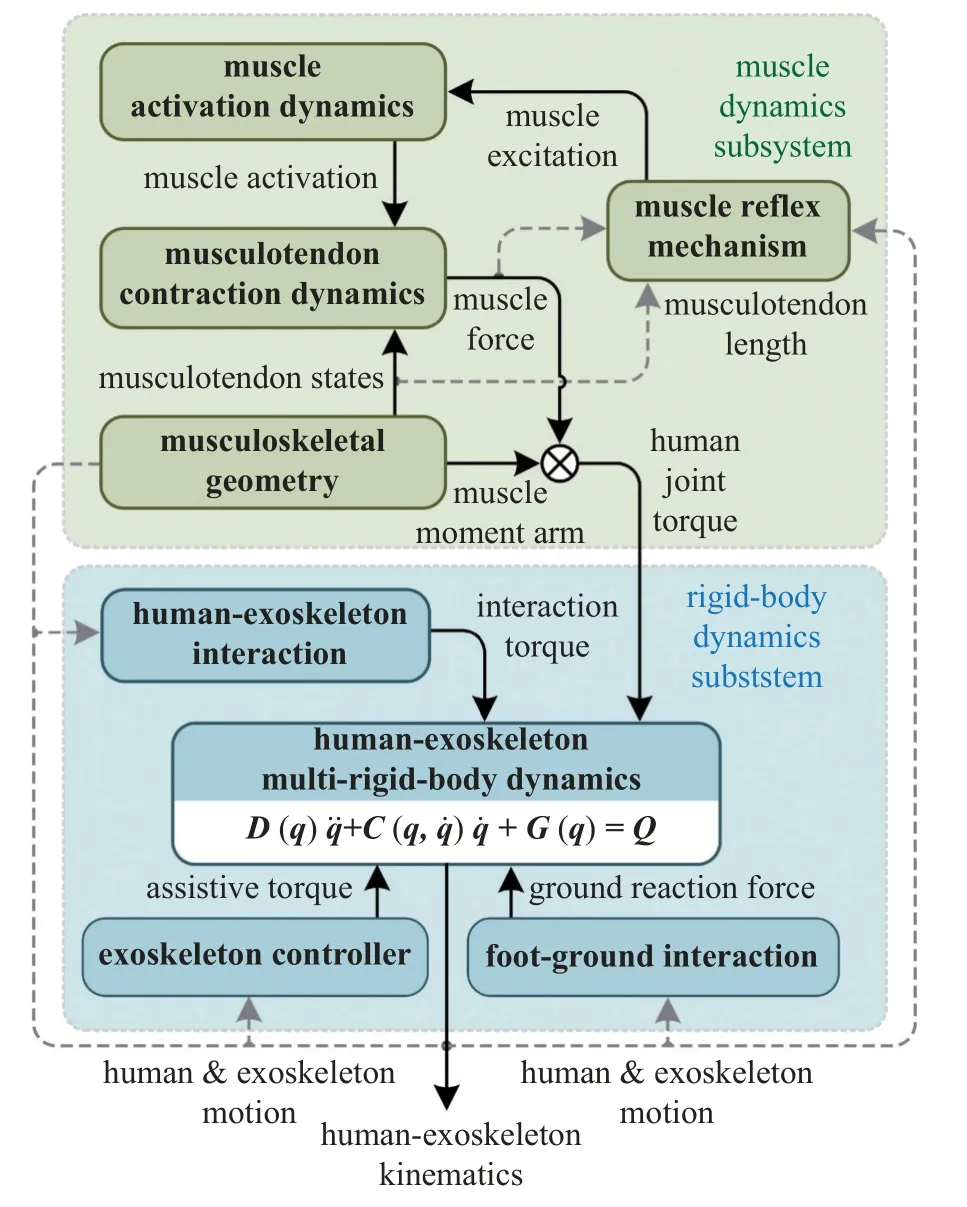
图1 神经-肌骨-外骨骼耦合动力学仿真框架Fig.1 Dynamic simulation framework of the neuro-musculoskeletalexoskeletal coupled system
肌肉兴奋用于描述人体神经系统中,运动神经元传递至肌肉的神经电刺激信号.在肌肉动力学子系统中,肌肉兴奋通过神经肌肉反射机制生成,兴奋值与关节运动、步态阶段、肌肉长度和肌肉力等运动学和生理学因素密切相关.肌肉兴奋产生后,将通过肌肉激活动力学计算得到肌肉激活,从而驱动肌肉收缩产生肌肉力.
另一方面,利用肌骨几何关系,可以根据关节运动状态计算得到肌肉相对关节转轴的力臂、肌肉长度和肌肉速度.这样,通过肌肉力与力臂相乘,即得到肌肉对关节贡献的力矩.最终,关节力矩、人机交互力、外骨骼助力和地反力共同输入人-外骨骼多刚体动力学,生成系统运动.而系统运动、肌肉力和肌肉长度则会作为反馈进入神经肌肉反射模型中,进而生成下一时刻的肌肉兴奋.
为了在神经肌骨层面反映下肢关键肌肉对人体矢状面行走步态的影响,我们选取了下肢对步行贡献最大的7 组肌肉[28],如图2(a)所示.这些肌肉对于关节运动的产生起到重要作用.其中,有5 组为跨单关节肌肉:髂腰肌 (ILI) 驱动髋关节屈曲、臀大肌(GLU) 驱动髋关节伸展、股直肌(FEM) 驱动膝关节伸展、比目鱼肌 (SOL) 驱动踝关节跖屈和胫骨前肌(TA) 驱动踝关节背屈;两组为跨双关节肌肉:腘绳肌 (HAM) 同时驱动髋关节伸展和膝关节屈曲,腓肠肌 (GAS) 同时驱动膝关节屈曲和踝关节跖屈.
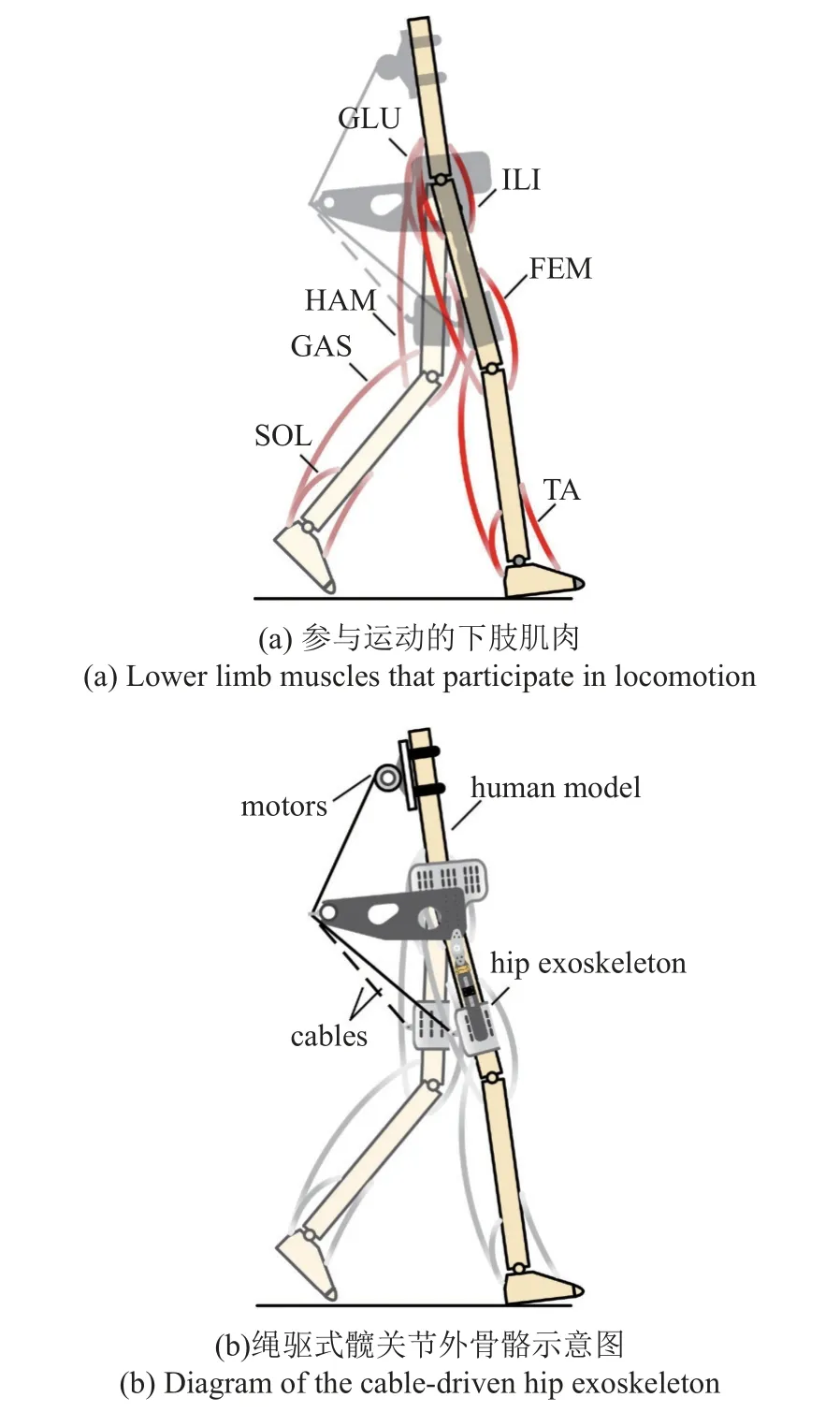
图2 仿真框架中涉及的下肢肌肉及外骨骼Fig.2 Lower limb muscles and the exoskeleton involved in the simulation framework
同时,该仿真框架能够通过改变刚体动力学子系统中的人机交互项,灵活地与各类下肢外骨骼进行耦合,方便外骨骼硬件的定制化设计与迭代.在本研究中,我们以此前设计的一款绳驱式髋关节外骨骼为例[6],来说明人体模型与外骨骼的耦合关系.如图2(b)所示,外骨骼的驱动电机置于人体后背处,其产生的拉力通过绳索传递至外骨骼大腿环箍部分.随后根据模型几何关系,可以通过拉力计算出外骨骼绕髋关节的转动力矩.
1.2 系统动力学建模
1.2.1 神经肌肉反射模型
从生理学角度看,人骨骼肌的激活由中枢神经系统传递至肌纤维的电化学信号控制.这种信号即肌肉兴奋,其大小受人体运动和肌肉状态影响.该影响机制可以用神经肌肉反射模型进行数学表示.通过对步行时人下肢运动力学原理的分析以及步态阶段划分算法的完善,在Geyer 等[26]和Geijtenbeek 等[29]研究的基础上,我们提出了一种改进的神经肌肉反射模型.根据肌肉兴奋的产生来源,设计肌肉常值刺激 σconst、肌肉力正/负反馈 σF±、肌肉长度正/负反馈 σL±和关节角度PD 反馈 σPDq±4 种基本反射机制,最终的肌肉兴奋就由这4 种基本反射机制叠加而成
式中,σ 为肌肉兴奋,其上标 m us 表示其所属肌肉简称;KL和KF分别表示肌肉长度增益系数和肌肉力增益系数;为根据肌肉最大力进行归一化后的肌肉力,分别表示根据最大肌力时的肌肉长度进行归一化后的肌肉长度和初始肌肉长度,即;{ }+表示内部运算值为正时不变,否则为0.在4 种基本反射机制中,肌肉常值刺激 σconst表示对肌肉施加的恒定兴奋值.肌肉力正/负反馈 σF±和肌肉长度正/负反馈 σL±分别表示肌肉力及肌肉的拉伸/收缩对肌肉兴奋的促进/抑制作用.特别地,当肌肉力来源为其他肌肉(m us ≠mus′) 时,肌肉力和肌肉长度反馈机制可描述两肌肉间的协同或拮抗关系.躯干角度PD 反馈σPDq±表示上肢躯干倾角对肌肉兴奋的促进/抑制作用.
肌肉兴奋的变化模式同样与一侧腿在步态周期内所处的阶段有关.一般地,一个步态周期被定义为同一只脚连续两次脚跟着地之间的时间间隔[28].在本模型中,我们将一个完整的步态周期分为5 个不同的阶段,包括支撑相的3 个阶段 (early stance,late stance,lift off) 和摆动相的两个阶段 (early swing,landing).相邻步态阶段间的切换由包括对双脚位置及地反力的综合评估决定[29].因此,可以根据各肌肉在人行走的每个步态阶段的功能和收缩特征,设计控制其产生兴奋的基本反射机制的组合模式[26].与前人的神经肌肉反射模型研究[26,29]相比,我们通过对步态阶段的进一步细化,得以更精确地捕捉步行过程中的肌肉反射规律,并大大提高了后续的系统动力学仿真的真实性.
为保证本节描述的神经肌肉反射模型能够最大限度反映人体运动时肌肉兴奋产生的真实情况,模型中共有29 个参数需要通过优化来确定.这些参数构成反射参数向量w∈R29,包括18 个比例项系数3 个归一化期望肌肉长度3 个关节角度阈值以及5 个常值肌肉刺激 (CFEM,CHAM,CGLU,具体优化过程将在2.1 小节阐述.
1.2.2 肌肉激活动力学模型
肌肉激活度表示肌肉肌浆中结合的钙离子浓度与其生理最大浓度的比值,记为a,取值范围为[amin,1][30].值得注意的是,肌肉的激活与去激活行为并不伴随肌肉兴奋立即产生,而是存在一个延时.我们通过一个一阶微分方程描述肌肉激活与肌肉兴奋之间的时间延迟.尽管目前已有研究提出更精确的肌肉激活模型[31-32],但其复杂的形式也带来计算效率的牺牲,因而难以应对大规模和长时间的肌肉动力学仿真问题,如考虑神经肌骨系统的人体步行仿真等.
1.2.3 肌肉收缩动力学模型
肌肉收缩力的产生不仅取决于肌肉激活程度,还与肌纤维状态、肌腱状态、羽状角和最大肌力等相关联.本研究采用Millard 改进的Hill 肌肉模型来描述肌肉收缩动力学[33].
在改进的Hill 肌肉模型中,一个完整的骨骼肌由4 个单元组成:收缩单元 (CE) 根据肌肉激活程度产生肌纤维主动收缩力,其大小与肌肉激活度、肌纤维长度和肌纤维收缩/舒张速度有关;阻尼单元(DE) 与收缩单元并联,表征肌纤维的阻抗特征,其大小仅与肌纤维收缩/舒张速度有关;并联弹性单元(PE) 与收缩单元、阻尼单元并联,产生被动弹性力,表征肌纤维的弹性特征,其大小仅与肌纤维拉伸长度有关;肌腱 (T) 与肌纤维串联,产生肌腱弹性力,表征肌腱的弹性特征,其大小仅与肌腱拉伸长度有关.收缩单元、阻尼单元和并联弹性单元三者并联,共同产生肌肉力.图3 展示了上述部分肌肉力与肌纤维长度、收缩/舒张速度的关系曲线.
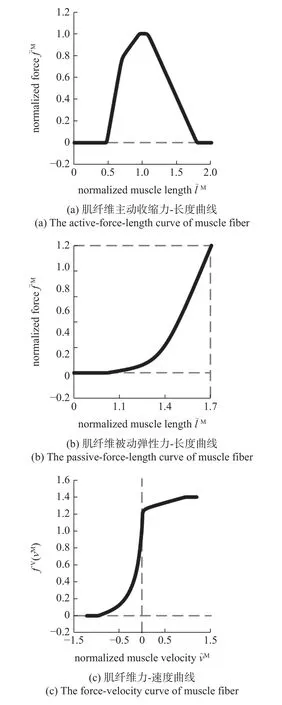
图3 肌肉力-长度-速度关系曲线Fig.3 The muscle force-length-velocity relationship curve
1.2.4 肌肉-骨骼几何关系
在前向动力学步行仿真中,人体运动由关节力矩驱动,而关节力矩由跨越该关节的多个肌肉产生,其大小受关节角度、肌肉力、肌肉接头位置和肌肉缠绕路径等因素影响[34].我们参考生物运动预测软件SCONE 中的H0914 人体肌骨模型[35],以获得人体下肢肌肉和骨骼的位置、形状、路径和最大主动肌力等信息,从而计算肌肉力作用线到关节的力臂,最后得到肌肉绕关节的力矩.
1.2.5 人-外骨骼耦合系统多刚体动力学模型
在前文肌肉反射机制、肌肉激活动力学、肌肉收缩动力学和肌骨几何模型的基础上,进行人-外骨骼耦合系统的平面多刚体动力学建模.其中,人体简化为上肢躯干、左右大腿、左右小腿和左右脚共7 个刚体,并穿戴1.1 节介绍的绳驱式髋关节外骨骼;外骨骼简化为背部部分、腰部部分和腿部部分共3 个刚体,其中背部部分和腰部部分与人体上肢躯干固连.系统共有11 个自由度,分别为:躯干倾角和平面位置,左右髋、膝、踝关节角度,以及左右外骨骼腿部部分与大腿的夹角.需要说明的是,考虑到在平面模型中引入髋关节在冠状面的内收-外展自由度会造成非常大的计算困难,因此本文暂未考虑这一自由度.
人-外骨骼耦合系统的多刚体动力学模型可以由第二类拉格朗日方程表示,形式为
其中,q∈R11×1为广义坐标向量,D(q)∈R11×11为质量矩阵,为科氏力和离心力矩阵,G(q)∈R11×1为重力项.Q∈R11×1为广义力向量,包含人体关节力矩 (由肌肉进行驱动)、外骨骼助力力矩、人-外骨骼交互力矩和足地接触力.其中,人体关节力矩由各肌肉绕该关节的力矩求和得到;外骨骼腿部部分与大腿间因相对位移产生的交互力矩通过Kelvin-Voigt 模型[36]进行描述,模型参数参考文献[37];足地接触中受到的地面正压力和摩擦力分别由Hunt-Crossley 模型[38]和Hollars 模型[39]描述.
至此,1.2.1~1.2.5 节中对肌肉兴奋-激活-收缩动力学、肌骨几何关系和多刚体动力学等的建模,共同构成了一个完整的神经-肌骨-外骨骼耦合动力学模型.
2 模型优化与仿真
2.1 模型参数优化
2.1.1 优化问题构造
在1.2.1 节描述的肌肉反射模型中,共有29 个参数需要通过优化来确定.构成肌肉反射参数向量w∈R29.构造优化问题为
使用分阶段优化方法确定待优化参数向量w的值.在第一阶段,优化目标J1为模型在给定时间下的行走距离尽可能远;在第二阶段,优化目标J2为模型在限定速度下产生更自然和更真实的步态,即行走过程中的关节角度活动范围和地反力大小均在合理范围内,且肌肉的能量消耗尽可能小.J1和J2和具体表达式将在下一小节给出.在两阶段优化过程中,都需满足肌肉-肌腱二力平衡等式约束、多刚体动力学约束,以及肌肉兴奋和肌肉激活范围.分阶段优化策略可有效提升优化速度和鲁棒性,从而在无法精确预知参数初值的情况下也能快速收敛至较优值.
2.1.2 优化目标函数设计
由于待优化参数的初始值往往与其最优解偏差较大,优化难以一步到位,因此第一阶段优化的目标是在给定仿真时间下使模型行走距离最大化.此时的目标函数定义为
其中,xCOM为模型质心的横向移动距离,T为从仿真开始至仿真结束或模型跌倒所经历的时间步数,ν为地面坡度的正切值,ψ 表示模型从起点行走至期望目标点的移动距离.
若J1<0,说明模型已能够在T时间步中的行走ψ 米,一阶段优化结束,此时对应的参数向量将作为第二阶段优化中参数的初始值.
第二阶段的优化目标为下列多个目标函数的加权之和
其中,Jvel用于评估模型质心按限定速度行走的能力,并对模型跌倒行为进行惩罚;Jangle用于对膝和踝关节过屈或过伸进行惩罚;JGRF用于限制产生的地反力的大小;Jeffort用于评估行走期间肌肉的能量消耗[40].ωvel,ωangle,ωGRF和 ωeffort为每个目标函数对应的权重系数,根据优化经验分别确定为100,0.1,1 和10.
2.1.3 优化策略设计
采用协方差矩阵自适应进化策略 (CMA-ES) 对29 个肌肉反射参数进行优化.CMA-ES 算法是一种适用于非线性、非凸函数的实参数连续域随机优化方法[4,41],因其优化效率高、抗噪声能力强、全局寻优能力强和对于高维黑箱优化问题有良好表现,目前已成功用于求解大规模、多目标及复杂函数优化问题[42-44].优化框架可分为人-外骨骼行走仿真、目标函数评估和CMA-ES 参数寻优3 步,不断迭代直至满足优化结束条件.
(1) 人-外骨骼行走仿真:在每一代优化开始前,CMA-ES 算法将产生N个肌肉反射参数向量w;对于每个w,分别进行人-外骨骼耦合系统的步行动力学仿真,并记录仿真过程中的肌肉状态、关节运动和地反力等数据.
(2) 目标函数评估:根据记录的相关仿真数据计算出当前肌肉反射参数下的目标函数值.
(3) CMA-ES 参数寻优:根据不同参数条件下的目标函数值,通过CMA-ES 算法寻优,产生新一代的N个肌肉反射参数向量w.
2.2 动力学仿真
为验证动力学仿真框架的有效性,并评估模型在不同场景下捕捉人-外骨骼耦合系统的动力学响应的能力,我们进行了人-外骨骼耦合模型的动力学仿真.由于模型的建立过程不依赖特定步行条件、环境或实验数据,因此可以对不同步行任务下的人-外骨骼耦合系统响应变化进行系统研究.需要说明的是,由于仿真的重点在于验证所提仿真框架在预测人-外骨骼系统动力学响应方面的有效性和准确性,而非评估人体所穿戴外骨骼的助力的影响,因此在仿真和后续的实验中,对人-外骨骼交互的考虑不以外骨骼开机主动提供助力为前提.
图4 展示了模型平地行走仿真的结果,其中图4(a)为模型行走定格图,图4(b)~图4(f)为仿真过程中得到的生理学和生物力学信息.可以看到,仿真框架不仅具备生成接近真实且稳定的行走运动的能力,且提供了丰富和细致的系统内部信息:包括图4(b)和图4(c)中以腘绳肌 (HAM)、臀大肌 (GLU) 和比目鱼肌 (SOL) 为例分别展示的肌肉激活度和肌肉力信息;图4(d)和图4(f)中以髋、膝和踝关节为例展示的关节力矩和关节角度信息;图4(e)中展示的人-外骨骼交互力矩信息;图4(g)中展示的足地正压力信息等,根据步态周期用虚线分隔.这些信息很难在实验中通过测量得到,因此它们在模型动力学仿真分析中尤为重要.从仿真结果来看,外骨骼腿部部分与大腿之间的交互力矩在步态周期末期快速增加,后快速减小,这是由于人体摆动腿在摆动末期的快速伸直-弯曲运动导致,这也与髋膝关节在同一时刻的角度突变相对应.另外注意到膝关节力矩重复性较差,这可能与模型运动初期和末期行走时重心欠稳定导致;踝关节角度总体变化略小,而在摆动相变化幅度较大,这可能与胫骨前肌神经反射机制的设计尚存不足,导致胫骨前肌发力变化较大有关.值得注意的是,该动力学仿真框架的一大特点是无需实验数据输入,因此可以在不受真实实验条件限制的情况下得到系统的生理学和生物力学信息,进而帮助理解不同运动任务和环境下、甚至人穿戴不同外骨骼模型时的耦合系统动力学行为.
所提仿真框架除能够产生真实且自然的步态并提供丰富的生理学和生物力学信息外,还能够捕捉行走环境的变化,并在模型的动力学响应上有所体现.以肌肉激活度为例,图5(a)为模型在平地和上坡行走时右腿的股直肌 (FEM)、腘绳肌 (HAM)、臀大肌 (GLU)、髂腰肌 (ILI)、腓肠肌 (GAS)、比目鱼肌(SOL)和胫骨前肌 (TA) 的肌肉激活度变化曲线,已根据步态周期进行归一化;图5(b)为各肌肉在一个步态周期内的RMS 值 (mean ± std).通过对比模型平地和上坡的行走结果可以发现,不同肌肉的激活程度对于行走坡度变化的反应也不尽相同,这是由它们具体参与到人体步行运动的分工决定的.举例来说,腘绳肌、臀大肌和髂腰肌在模型平地行走时肌肉激活的RMS 值分别为0.078 ± 0.010,0.339 ±0.016,0.172 ± 0.019,而它们在上坡时的RMS 值分别为0.247 ± 0.014,0.406 ± 0.018 和0.341 ± 0.009,同时臀大肌和髂腰肌的肌肉激活模式较平地行走有明显变化.从神经肌肉反射机制来看,腘绳肌和臀大肌提供了支撑相的髋关节伸展力矩以支持重心抬升;髂腰肌在摆动相主要起到维持躯干稳定和髋关节前屈的作用,而上坡使得人体在维持行走稳定性和大腿抬升方面需要付出更多努力[46-47].这也解释了这三类肌肉在模型上坡时的肌肉激活水平相较于平地环境均有显著上升 (p<0.05) 的原因.同时,注意到胫骨前肌主要负责步态摆动相中的踝关节背屈运动,而上坡行走时髂腰肌发力的增加促进了髋关节前屈和大腿抬升,从而只需较小的背屈力矩即可避免摆动相时脚尖触碰地面.这导致了胫骨前肌的RMS 值由平地 (0.064 ± 0.006) 到上坡 (0.049 ±0.002) 时的显著下降 (p<0.05).另外,比目鱼肌在上坡时的RMS 值 (0.382 ± 0.010) 与平地时 (0.257 ±0.006) 相比有显著上升 (p<0.05),这使其在步态支撑相末期能够提供更多的推进力矩.而由于腓肠肌在步行中有着与比目鱼肌相似的功能和神经肌肉反射机制,因此在上坡时后者肌肉激活的增加也间接导致了腓肠肌肌肉激活RMS 值由平地时的0.423 ±0.026 略下降至上坡时的0.400 ± 0.012,但没有明显差异 (p>0.05).
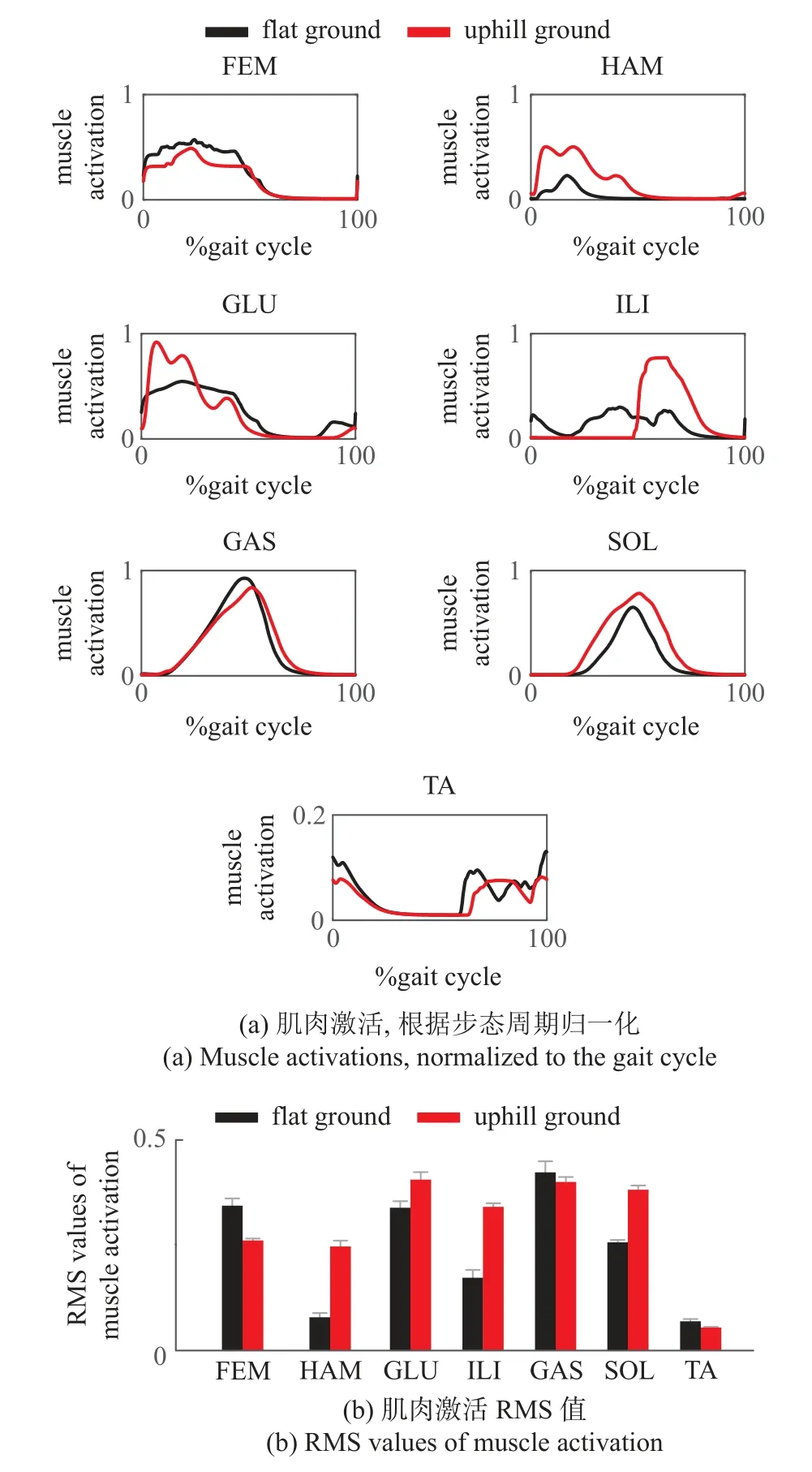
图5 平地和上坡行走时的肌肉激活度及其RMS 值,仿真结果Fig.5 Muscle activations and their RMS values of walking on flat and uphill ground,simulation results
上述仿真结果表明,在人-外骨骼模型行走环境多变的情况下,所提的仿真及优化框架在能够捕捉到行走坡度的不同,并体现在肌肉激活模式的规律性变化中.其中,上坡行走条件下腘绳肌、臀大肌、髂腰肌和比目鱼肌的肌肉激活程度明显高于平地行走,而股直肌和胫骨前肌的肌肉激活程度低于平地行走.另外值得强调的是,该框架在进行不同地形的仿真优化过程中不需要实验数据的输入,从而在人穿戴外骨骼行走评估时进行动力学仿真的效率大大提升.
3 实验验证
3.1 实验方案与结果
为进一步验证所提动力学仿真框架用于人-外骨骼行走评估的有效性和其预测结果的准确性,我们开展了平地和上坡 (5.71°,10%坡度[22]) 行走测试实验.本测试实验已获得复旦大学伦理委员会批准(批准号:FE21124).行走测试实验实景图如图6所示,一位成年男性受试者 (28 岁,70 kg,171 cm) 穿戴髋关节外骨骼,在平地和上坡地形下进行行走测试.受试者两侧腿的胫骨前肌、腓肠肌、比目鱼肌、股直肌和腘绳肌处皮肤表面放置Noraxon 肌电传感器并通过医用弹性绷带固定,用于采集表面肌电信号;在受试者背部、大腿外侧、小腿前侧和脚背处固定Noitom 惯性传感器,用于采集人体运动信息并进行步态识别与划分.实验开始后,受试者首先穿戴惯性传感器完成姿态校准,随后固定肌电传感器站立2 min,测量各肌肉静息状态下的肌电信号.最后,受试者穿上外骨骼分别在跑步机无坡度和10%坡度条件下以0.8 m/s 行走,并通过上位机采集受试者行走步态稳定区间内的60 s 数据.
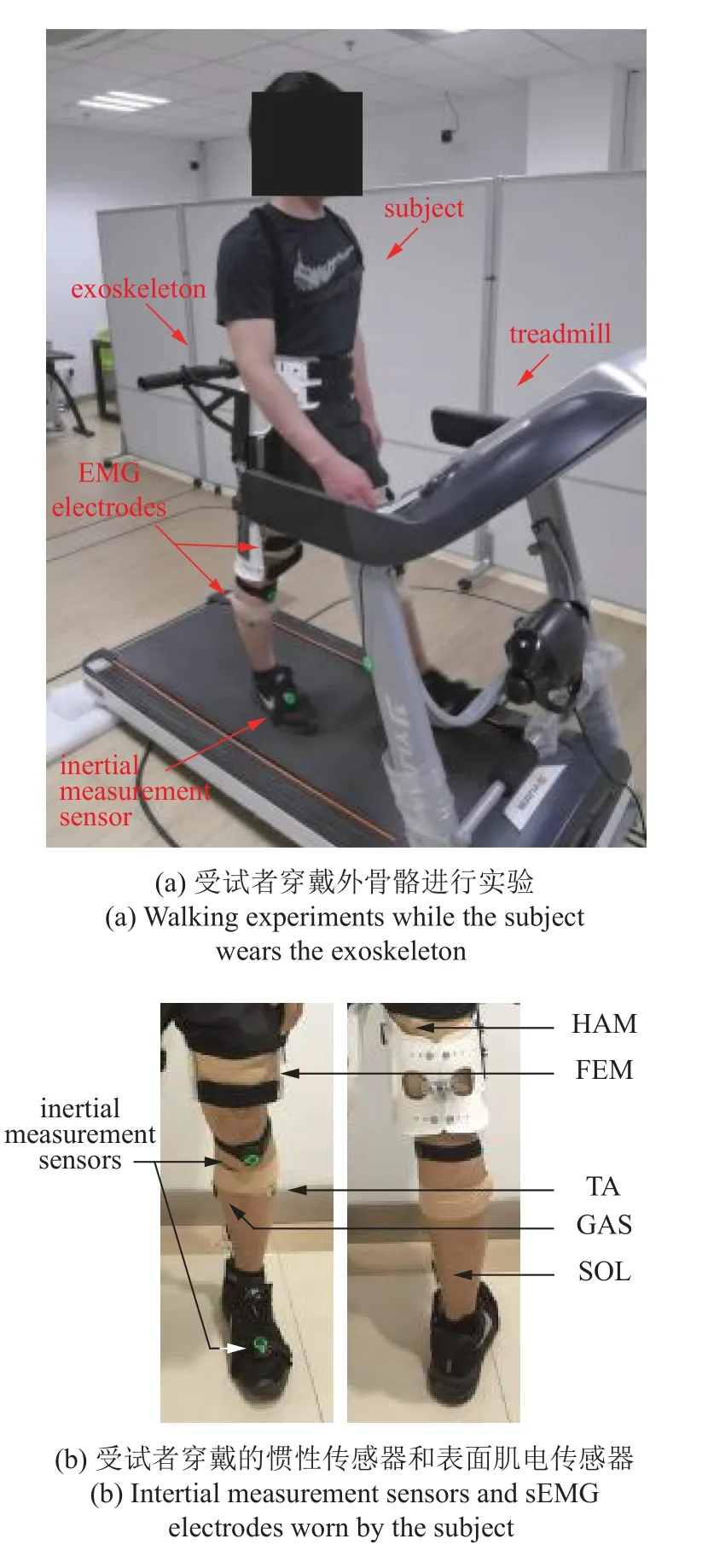
图6 受试者穿戴外骨骼、惯性传感器和表面肌电传感器的实验效果图Fig.6 Photos of experiment while the subject wears the exoskeleton,inertial measurement sensors and sEMG electrodes
Noitom 惯性传感系统采样频率为100 Hz,Noraxon 肌电传感系统采样频率为2000 Hz.对采样后的表面肌电信号原始数据,首先使用二阶Butterworth滤波器进行10 Hz 高通滤波,再进行全波整流,最后使用二阶Butterworth 滤波器进行5 Hz 的低通滤波[48].肌电信号的幅值根据对应肌肉的最大自主收缩值 (maximum voluntary contraction,MVC),即受试者行走过程中测得的肌肉电信号的最大幅值,进行归一化.
将实验中采样并滤波后的肌电信号与2.2 节步态仿真中得到的肌肉激活进行比较,结果如图7所示.需要说明的是,尽管肌电信号能够表征肌肉的激活程度,但两者并非同一物理量,因此不能进行幅值上的量化比较.因此,本节的重点在于对两者变化趋势的定性比较.图7(a)的第一排展示了在平地和上坡条件下动力学仿真生成的肌肉激活度曲线,第二排为测试实验得到的肌电信号曲线,均已根据步态周期进行归一化处理.在相同步行环境下,各肌肉的仿真肌肉激活度与实测肌电信号变化趋势的相关性用相关系数衡量,结果如表1 所示:除胫骨前肌外,其余4 个肌肉在平地和上坡条件下的相关系数均超过0.45,高于Wren 此前报告的不同个体行走实验间肌电信号的相关度阈值0.4[49].这表明在平地和上坡行走条件下,肌肉激活的仿真和实验结果均具有较好的一致性.
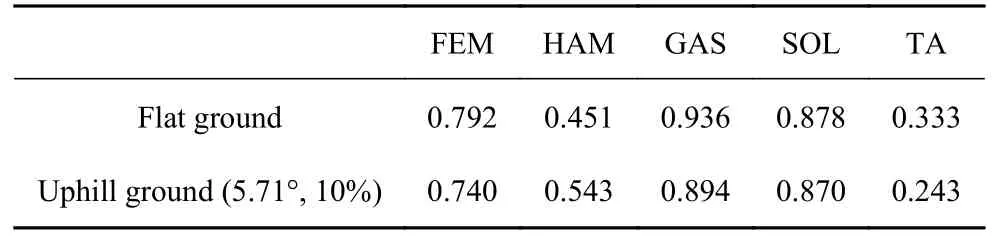
表1 仿真与实验之间归一化肌肉激活曲线的相关系数Table 1 Correlation coefficients of the normalized muscle activities between the simulation and experiment results

图7 平地和上坡行走时的肌肉活动及其RMS 值,仿真与实验结果对比Fig.7 Muscle activities and their RMS values of walking on flat and uphill ground,comparison between simulation and experiment results
图7(b)展示了仿真和实验下肌肉活动的RMS值 (mean ± std).总体来看,模型由平地行走到上坡行走时,股直肌和胫骨前肌的RMS 值均有下降,腘绳肌和比目鱼肌的RMS 值均有上升,在仿真和实验下呈现相同的变化趋势.这表明人-外骨骼耦合模型中的神经肌肉反射机制能够比较精确地反映人体行走时肌肉活动的客观变化规律.实验下腓肠肌在上坡时的RMS 值 (0.186 ± 0.026) 高于平地 (0.164 ±0.019),与它在仿真中的变化趋势相反.这可能归因于腓肠肌与比目鱼肌相似的肌肉功能和神经肌肉反射机制,导致二者的肌肉活动之间出现了代偿.这也解释了为什么比目鱼肌激活度在仿真中的增加程度远高于测量结果.
3.2 讨论
在本节中,以一位受试者为例,对人体穿戴外骨骼在平地和10%坡度行走条件下的肌肉激活变化规律进行了实验对比验证.综合来看,在本文所提仿真框架下进行的人-外骨骼耦合模型行走动力学仿真能够精确捕捉不同地形下的行走差异,各肌肉激活模式能够适应地形的变化,与实测结果相符合.从泛化性角度考虑,本文关于肌肉激活模式随地形的变化规律,在一定行走坡度和速度范围内具有参考价值.但也应注意,行走坡度的变化,以及上坡/平地/下坡行走的变化,都将影响人体下肢肌肉的激活与收缩模式;同时,由于人行走偏好的差异,相同行走条件下肌肉激活的具体情况也因人而异.后续工作中,将继续探索所提仿真优化框架在表征不同行走条件和不同受试者的肌肉激活模式上的泛化能力.我们也注意到,本文所提框架下的行走仿真结果与实验结果对比尚有不符之处,如胫骨前肌的仿真和实验结果相关系数低于其他肌肉:这一方面是因为胫骨前肌在人体行走时的需要在支撑相前中发力以保持踝关节刚度[28],同时在摆动相初期收缩带动脚掌前摆,而模型中对其神经肌肉反射机制的设计尚未兼顾这些复杂的功能;另一方面,个体间行走习惯的差异也可能导致仿真与实验结果相关度较低.这表明在神经肌肉反射机制的设计方面还存在很大优化空间;另外,虽然该框架适用于不同任务,但对于跑步、游泳和上下楼梯等相对复杂运动,建立有效准确的神经肌肉反射机制依然存在很大挑战性,值得深入研究.同时,本研究中进行仿真和实验的行走条件和参与行走测试实验的受试者比较少,这一定程度上限制了对所提框架有效性和泛用性的评估;而通过大规模实验对其进行严格验证也将消耗大量人力物力,存在一定困难.但总体来说,该仿真框架在多环境步态预测仿真方面与实验数据保持了较好的一致性,同时能够输出丰富的生理学和生物力学信息,无需实验数据输入.这对评估人-外骨骼耦合系统在复杂多变环境及运动中的性能,以及指导外骨骼设计和控制具有重要意义.
4 结论
本文以人-外骨骼耦合系统为研究对象,基于无实验输入的神经-肌骨-外骨骼耦合系统仿真框架,选取平地和上坡两种地形进行了模型的动力学优化仿真,系统分析了仿真框架捕捉不同场景下人-外骨骼耦合系统的动力学响应的能力.最后,本文将仿真与实验下平地和上坡行走的肌肉活动进行对比,验证了所提仿真框架的准确性和有效性.通过本文的研究,主要结论如下.
(1) 考虑神经肌骨动力学、人-外骨骼交互和足地接触等因素的耦合动力学闭环仿真优化框架能够输出包括肌肉激活、肌肉力、关节力矩、人体运动和地反力等丰富的生物力学和生理学信息;且无需实验数据输入,使其对不同的运动环境有更强的适应性,同时也意味着对于其他运动任务,只需应用合适的神经肌肉反射机制,即可进行快速的优化仿真和性能评估.这为人-外骨骼耦合系统在环境和运动任务变化时的仿真与评估提供了新的途径.
(2) 对模型的行走动力学仿真分析表明,上坡行走 (5.71°,10%坡度) 与平地行走相比,主要起到维持躯干稳定作用的腘绳肌、臀大肌和髂腰肌的肌肉激活均有显著上升 (p<0.05),负责站立末期提供推进力的比目鱼肌的肌肉激活同样有显著上升 (p<0.05).而股直肌与胫骨前肌的肌肉激活发生了显著下降 (p<0.05).腓肠肌的肌肉激活同样有略微下降,但下降不明显.与实验得到的肌电信号对比结果表明,仿真下的肌肉活动曲线与实测结果基本相符,同时仿真中肌肉激活的RMS 值随坡度的变化趋势与实验数据总体保持一致.上述结果从生理学的角度验证了本文提出的仿真框架在应对不同地形下行走动力学仿真的准确性和有效性.
综上所述,本文的研究从动力学角度入手,验证了基于无实验数据输入的人-外骨骼动力学仿真,进行人穿戴外骨骼行走运动动力学评估的可行性和有效性,为人-外骨骼耦合系统在多场景和多任务下的行走仿真与性能评估提供了新的途径,具有指导性意义.在后续工作中,将针对人体穿戴/不穿戴外骨骼时行走的运动动力学特性,以及人体穿戴外骨骼在更多步行场景下和执行更多复杂运动任务时的运动动力学特性,进一步开展人-外骨骼耦合系统的相关动力学仿真和实验研究.
附录A 仿真框架中的参数取值
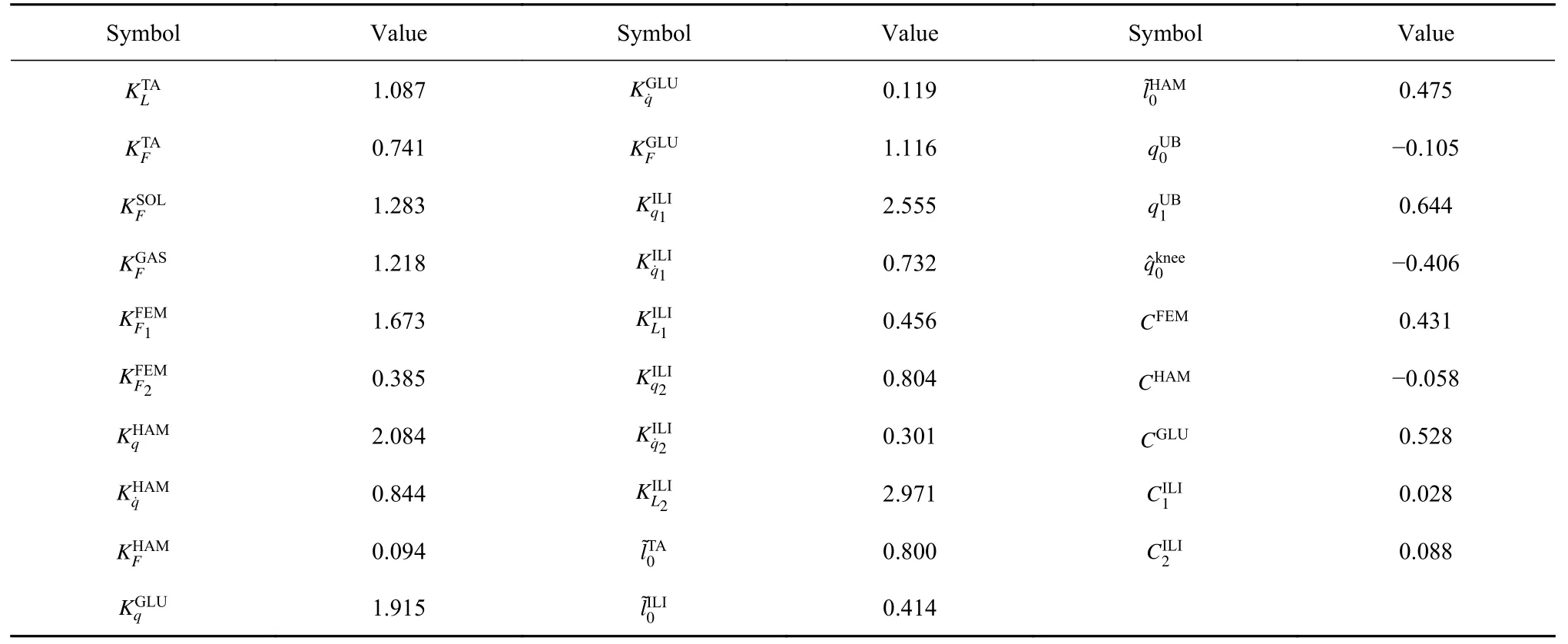
附表 A1 平地步行仿真中神经肌肉反射模型参数优化结果Table A1 Optimization results of the parameters in the neuromuscular reflex model in walking on flat ground
猜你喜欢
科学大众(2024年5期)2024-03-06 09:40:34
军事文摘(2024年6期)2024-02-29 09:59:38
科学导报(2023年79期)2023-12-01 03:07:19
昆明医科大学学报(2021年8期)2021-08-13 08:59:32
中国民间疗法(2021年7期)2021-07-22 06:43:44
小哥白尼(野生动物)(2021年12期)2021-03-29 01:15:34
高师理科学刊(2020年2期)2020-11-26 06:01:16
中国毕业后医学教育(2020年3期)2020-01-19 01:37:10
电子制作(2018年18期)2018-11-14 01:48:04
自动化学报(2018年6期)2018-07-23 02:55:42
