
基于图像特征的铁路车辆制动组件异常检测
2024-04-13 06:54贾宇翔张益成亮褚翔郝植恒
电子设计工程 2024年7期
贾宇翔,张益,成亮,褚翔,郝植恒
(1.国能铁路装备有限责任公司肃宁车辆维修分公司,河北 沧州 062350;2.北京康拓红外技术股份有限公司,北京 100095;3.北京航天康拓信息技术有限公司,北京 100095)
车辆制动组件主要包括能够承载高速行驶压力的车辆制动器和刹车轮零件等,是货车刹车系统的关键部件。刹车踏板与刹车轮轴之间设有密封件,以确保车轮在高速行驶时产生制动力,并能将其传输至车轮,以此保证车辆的正常运行。车辆制动组件是制动系统重要组成部分,由于车辆在行驶过程中,车轮之间摩擦力和震动会使得刹车性能下降,从而导致刹车踏板发生故障或失效。同时刹车踏板或刹车轮间压差也会使刹车性能下降,导致车辆运行安全性下降。因此,需要对铁路车辆制动组件异常情况进行检测。文献[1]提出了基于多任务学习的检测方法。该方法结合常规状态下轴承温度计算结果,充分考虑循环神经网络模型中的复杂迭代法,采用了自注意力机理来检测铁路车辆制动组件的温度异常;文献[2]提出了基于AHP-熵值法优化决策的检测方法。该方法根据同类型元件温升趋势一致的特点,对元件温度偏差进行检测。使用K-means 聚类方法通过分析异常温升特性,结合温升特性检测车辆制动组件异常情况。由于车底结构复杂,细小零件众多,使用上述这两种方法难免出现纰漏,严重影响车辆运行安全。针对该问题,提出了基于图像特征的铁路车辆制动组件异常检测方法。
1 基于TFDS系统的图像采集
针对列车行驶状况进行监测和故障诊断,是当前行车安全管理的一项主要内容。为便于对列车各部件异常进行监测,研制了铁路车辆制动组件TFDS系统[3]。系统总体结构如图1 所示。

图1 铁路车辆制动组件TFDS系统结构
从图1 可以看出,TFDS 系统先从CMOS 照相机与前置处理器获取车辆制动组件图像。其次,由光纤收发器和端口处理器完成车辆制动组件数据实时传输[4]。利用交换机将数据安全传输至网络服务器,交换机中搭载了四个窗口计算机[5],以便检测分析中心对数据采集结果进行深入分析。
在TFDS 技术支持下,获取制动组件图像背景信息,建立基于特征匹配的识别模型[6-7],以此搭建图像区域阶段矩阵:
式中,f(x,y)表示二值图像;xa、yb表示不同的图像区域[8]。由于图像具有旋转、移动不变属性特征,所以中心矩阵表达式为:
式中,(x′,y′)表示图像中心坐标。使用二值化处理方法对图像进行预处理:
式中,Tx、Ty分别表示二值化处理图像的上、下限值[9]。由于图像特征提取过程中会出现失真畸变问题,所以需要对图像这一问题进行相关处理[10-11]。
通过坐标变换设计畸变校正过程,获取由(x,y)向(x′,y′)坐标转换的映射Gk,其中k为缩放比例因子[12]。通过仿射变换校正畸变图像,可表示为:
通过该公式确定缩放比例因子,解决拉伸或压缩坐标畸变问题,方便后续铁路车辆制动组件异常检测的顺利进行[13]。
2 基于图像特征的异常检测技术
应用铁路车辆制动组件TFDS 系统实时采集运行车辆信息,通过构建图像特征模型,将图像特征信息与背景信息结合,实现车辆制动组件异常检测。
2.1 特征模型构建
利用K-means 统计理论,对每一帧图像各像素点概率矩阵进行计算,并统计和分析了各点数据分布,找寻可能出现异常的位置[14]。将RGB 空间转换成HSV 空间,获取每个像素色调H、饱和度S和亮度V,根据颜色感知度对其进行非均匀量化处理[15]。根据人视觉敏感度对HSV 的颜色分量赋予不同权值,利用下述公式合成一维特征矢量,可表示为:
式中,n、m分别表示色调和饱和度划分空间数量。统计图像帧在每个子空间像素数获得图像帧HSV 颜色累积直方图。在获取图像帧HSV 颜色累积直方图后,利用欧氏距离分析图像帧间差异:
式中,Si表示第i帧图像累积直方图矢量;Sj表示第j帧图像累积直方图矢量;k表示计算次数。根据上述公式能够对每一帧中相似性进行计算,并对其进行了相关分析,得到了目标图像与背景距离。
2.2 组件异常检测
在数据集中随机选择多个目标作为初始聚类中心,将数据集中其余物体分配到离初始聚类中心最近群集,并进行反复迭代,最终得到一个新的聚类中心,直到标准函数收敛[16]。计算各点特征和背景之间的关系,并在各点都有相同属性值的情况下,分别求取各点属性值与背景之间方差,则图像特征模型如下:
式中,g表示聚类中心数量;h表示聚类次数;W表示数据对象位置;Ah表示聚类中心位置。
选择初始聚类中心,从数据集中选择g个对象,通过图像特征模型计算各节点与背景距离,将计算结果的中心点作为新的聚类中心。当聚类中心改变时,它会向步长方向移动,反之标准函数会逐渐收敛。在进行聚类之前,使用K-means 确定群集数目,初始簇中心选择是随机的,这会使聚类算法陷入局部最优,从而限制了算法应用。因此,需将不同位置特征与背景属性值转换为距离矩阵,得到每个位置与其对应相邻节点之间的关系方差,通过提取该点颜色特征矢量,将概念相似度作为相似性检验依据。相似性是指要被聚类对象和其感知范围内其他所有对象整体相似性,公式为:
式中,V表示图像帧感知实际阈值;λ表示相似系数。当sim(Si,Sj)<1时,说明目标图像与背景中均不存在异常信息;当sim(Si,Sj)≥1时,说明目标图像与背景中存在异常信息。
通过对各个特征矢量进行分类,得到各个特征矢量之间距离,并将该矢量分配到距离最近的类别,将新获得的类别作为一个新的聚类中心。重复以上过程,直至聚类中心不再发生变化,即标准函数实现了收敛。从每一类中抽取最接近簇中心的对象,该对象图像帧是关键帧,输出一系列关键帧。通过对所抽取特征矢量进行自组织聚类,获得最终特征矢量聚类,然后将关键帧作为输出序列,从而获取车辆制动组件异常序列,以此实现铁路车辆制动组件异常检测。
3 实验
以铁路车辆制动组件制动缸异常故障为研究对象进行相关的实验验证分析。
3.1 制动缸激励与实验方法
向制动管(列车管内)充气,制动管中的压缩空气进入主活塞的上部,从而保证主活塞(传动控制阀和滑阀)处于排气状态。从刹车管出来的压缩空气通过气门上的气孔流入压力气缸(工作气缸)。同时,在膨胀隔板的下部,向下推动膨胀隔板和膨胀活塞,使膨胀活塞的顶杆开启,使制动管内的压缩空气进入到第二气缸。在此过程中,体积腔和空气通过滑阀沟槽连通。在体积腔的压力下降后,平衡活塞被制动汽缸的压力压下。制动筒的压缩空气通过平衡活塞杆上的导管排放到大气中,制动器气缸处于松开状态。制动缸激励作用原理如图2 所示。

图2 制动缸激励作用原理示意图
在测试过程中,将制动缸传感器与制动缸后盖螺丝连接,以方便检测油路系统渗漏情况。拆掉配气阀门平衡部件排气孔,装上带有旋塞管子。在制动定压测试后将阀门关闭,并在1 min 内进行充气释放。
测试过程如下:保压前压强为211 kPa,保压1 min后,保压压强降低了1 kPa,变为210 kPa;保压2 min后,保压压强由210 kPa 升高到217 kPa;保压3 min后,保压压强由217 kPa 升高到229 kPa;保压5 min后,保压压强始终保持229 kPa 不变;保压6 min后,保压压强由229 kPa 降低到208 kPa;保压7 min后,保压压强由208 kPa 降低到200 kPa。
3.2 实验结果与分析
已知制动缸中上部分均出现了压力异常,分别使用基于多任务学习的检测方法、基于AHP-熵值法优化决策的检测方法和基于图像特征异常检测方法,对比分析制动缸异常识别结果,如图3 所示。

图3 不同方法制动缸异常图像识别结果
由图3 可知,使用基于多任务学习的检测方法、基于AHP-熵值法优化决策的检测方法图像识别结果的位置出现偏差,说明这两种方法并没有识别出制动缸体压力异常情况;使用基于图像特征异常检测方法图像异常位置识别结果较为全面,能够明确其异常情况。
使用这三种方法对比分析制动缸压强异常变化情况,对比结果如图4 所示。
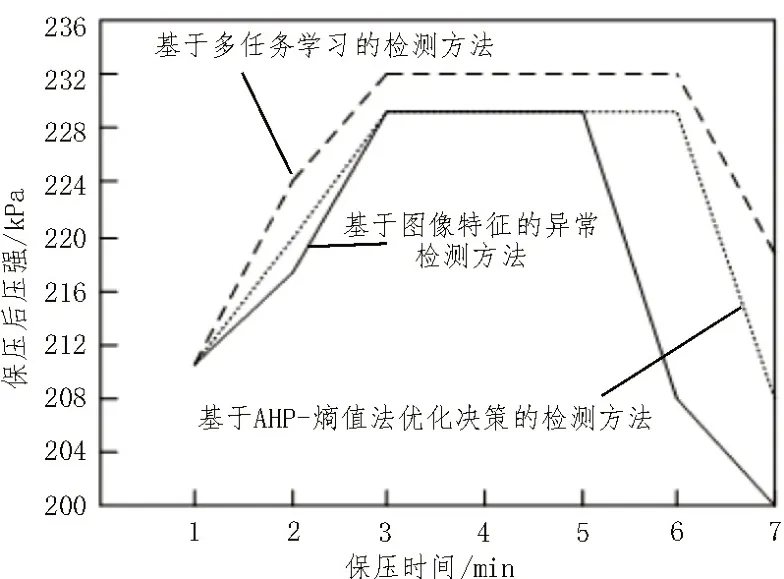
图4 压力异常变化对比分析
由图4 可知,使用基于多任务学习的检测方法、基于AHP-熵值法优化决策的检测方法经过7 min 保压后,得到的压强分别为218.5 kPa、208 kPa,与实际压强不一致;使用基于图像特征异常检测方法经过7 min 保压后,得到的压强为200 kPa,与实际压强一致,说明该方法的检测精准度更高。
4 结束语
应用TFDS 系统以及图像特征对铁路车辆制动组件异常情况进行检测,以最大程度保证检测精度。通过运用图像特征识别技术,对影响列车运行安全关键零部异常进行检测,使其从“人检人修”转向“机检人修”,铁路运输质量从“人工控制”转向“机器控制”,既减轻了检查员的工作量,又提高了运输效率,从而保障运输安全。
猜你喜欢
时代汽车(2023年19期)2023-10-24
铁道车辆(2022年2期)2022-05-07
中学生数理化·高一版(2021年11期)2021-09-05
科技创新与应用(2021年9期)2021-02-26
铁道运输与经济(2016年8期)2016-12-05
现代防御技术(2016年1期)2016-06-01
中小企业管理与科技·中旬刊(2016年2期)2016-03-18
新高考·高一物理(2016年1期)2016-03-05
机械工程师(2015年2期)2015-11-09
河南科技(2014年16期)2014-02-27
