
一种仿人手软体康复机器人结构设计与实验
2024-03-31 05:33邓华送董若楠曹大迪
合肥工业大学学报(自然科学版) 2024年3期
邓华送, 张 彦, 董若楠, 陈 品, 曹大迪, 王 勇
(1.合肥工业大学 机械工程学院,安徽 合肥 230009; 2.合肥工业大学 智能互联系统安徽省实验室,安徽 合肥 230009; 3.帝国理工学院 生物工程系,英国 伦敦 SW7 2AZ)
随着经济快速发展,人口老龄化趋势日益明显,老年人年龄增长的同时人体机能在逐渐衰弱;此外,建筑工地伤残事故、交通事故以及重大疾病等也易使人的身体机能受到损伤。手部作为使用频率极高的器官之一,其机能衰弱或受损将严重影响个人的生活质量,因此在手部功能受损时要及时治疗并进行康复训练。康复是一个长斯的过程,传统的康复训练主要以人工方式为主,较依赖于康复师的能力,但现阶段康复训练主要由医院康复医学科以及社区康复中心提供康复训练治疗,不仅康复资源有限,高昂的人工康复训练费用还给家庭及社会带来严重负担[1]。
当前,针对手部功能康复[2]的研究已成为康复工程医学以及机器人学科的一个热点,软体机器人相关研究的深度和广度得到快速拓展。文献[3]提出一种变刚度的、具有气动网格和纤维增强型2种结构的软体制动器;文献[4]提出一种由纤维增强致动器组成的软体制动器,还通过安装弯曲传感器实现抓取力量的PID控制;文献[5]通过拓扑优化建立多材料设计的数学模型,提出一种由软体材料和刚性材料组合成能够承受超过自身质量的负载软体机器人;文献[6]提出一种采用气动网络结构实现复杂运动并具备可编程设计的扭转软体机器人。
结合国内外关于手部康复软体机器人的研究可以发现,大多数的研究成果还停留在实验室阶段,虽然整体结构设计、智能化程度较高,但是离实际应用还有些差距,主要存在以下问题。
1) 与人手适配性差。人手指的弯曲主要在手指关节处,而现有的致动器弯曲形态多为整体半圆形,因此与人手的实际弯曲情况存在差距,部分致动器存在容易扭曲的问题,驱动能力较差。
2) 力学性能有待提高。手部功能障碍患者通常在初期存在手部僵硬的情况,因此要求软体致动器具有较大的输出力,以达到手部康复效果。
3) 制作工艺复杂、价格昂贵。目前研究人员制作软体致动器的主要工艺有二次脱模和3D打印技术:二次脱模需要将2个模型再次黏结,良品率较低;3D打印则难以应用到大批量生产中。部分投入市场的手部康复设备价格昂贵,大规模推广存在困难。
4) 便携性差,康复训练模式单一。部分装置采用固定设备提供气源,限制了装置的便携性,且提供的训练方法通常只有被动训练,模式单一。
鉴于以上问题,本文基于软体致动器的特点以及对手部功能康复训练的需求,提出一种偏心波纹管软体致动器结构以提高对手指的驱动能力,且与人手具有较高的贴合性;研制出一款具有镜像疗法功能[7]的手部康复软体机器人。通过手部康复软体制动器的制作和实验平台的搭建对仿真模型进行验证,旨在结合不同的康复训练模式提高训练的效率。
1 软体致动器的设计
1.1 手部分析
人手的手指部分由肌肉、骨头和14个骨关节组成,可以近似简化成拥有20个自由度。人手的骨关节示意图[8]如图1所示。图1中:DIP为远端指间关节;PIP为近端指间关节;MCP为掌指关节;IP为拇指指间关节;MP为拇指掌指关节;CM为腕掌关节。为了便于康复装置的设计,对手部运动模型进行简化,所有关节只考虑前后弯曲的自由度,骨骼为刚体连杆结构,简化后的手部运动模型如图2所示。

图1 人手骨关节示意图

图2 人手简化运动模型
人手常用的33种运动模式[8]如图3所示。

图3 人手常用的33种运动模式
设计软体制动器之前需要了解人手手指各关节活动的范围和手指指骨的长度,通过查阅文献[9-10]可以获取相关数据,结果见表1、表2所列。

表1 人手手指各关节活动范围

表2 人手手指各指骨长度 单位:mm
1.2 软体制动器结构设计
1.2.1 工作原理
目前手部康复软体设备多数采用圆形波纹管结构,其主要特点是制作简单,输出力大,整体为中心对称结构。但是在不受约束时该结构波纹管只具有伸长变形,自身不会产生弯曲变形,且周向波高相等导致在气压驱动变形时伸长率一致,需要依靠两端的固定支架使其产生弯曲变形,与人手弯曲适配性较低,存在一定的能量损耗,圆形波纹管弯曲变形示意图如图4所示。
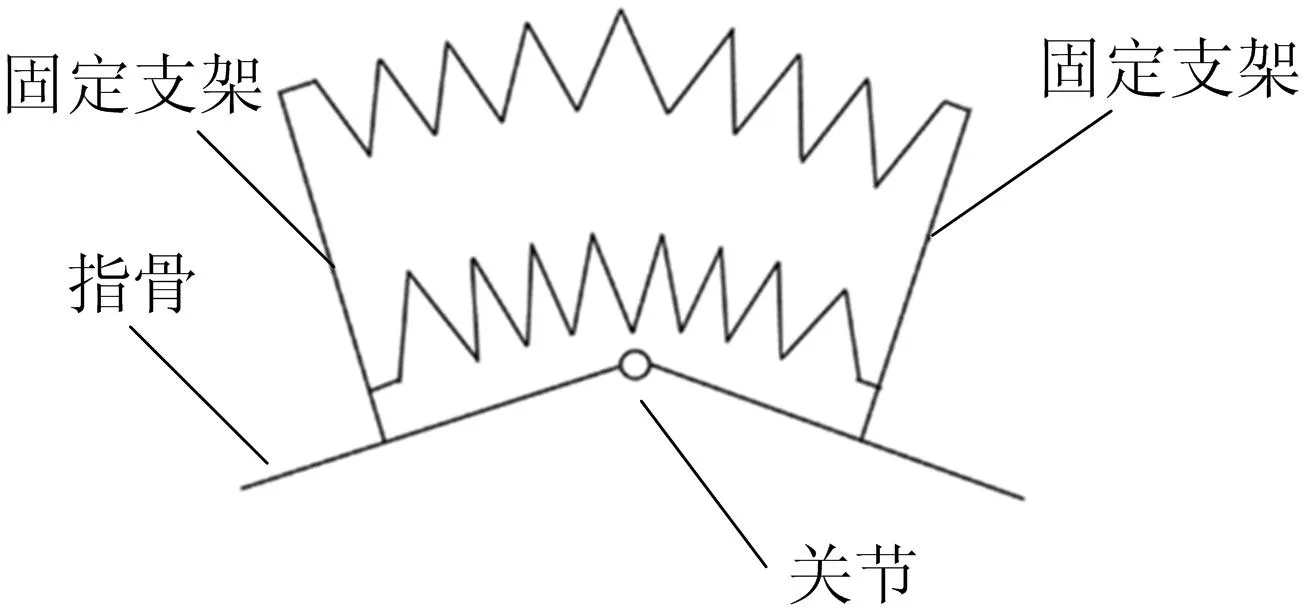
图4 圆形波纹管弯曲变形示意图
为使得波纹管结构致动器在弯曲过程中变形协调以及保证软体致动器自身具有弯曲性能,减小变形过程中的能量损耗和径向膨胀变形,本文提出一种偏心波纹管结构软体致动器,以提高圆形波纹管致动器的弯曲性能和对手指的驱动能力。偏心波纹管结构软体致动器的波峰、波谷中心存在一定的偏心距,为减少致动器的径向变形,波峰、波谷的横截面形状选为椭圆,波峰、波谷椭圆的长轴位于软体致动器左、右对称面上,且两椭圆的中心存在一定的偏心距。
偏心波纹管致动器结构如图5所示。其中:O1、A1A4、B1B4分别为波峰椭圆的中心、长轴、短轴;O2、A2A3、C1C2分别为波谷椭圆的中心、长轴、短轴;L为致动器的总长;t为波距;s为壁厚。软体致动器两侧的波高|B1B2|、|B3B4|相等,由于偏心距|O1O2|的存在,使左、右对称面位置的上波高|A1A2|大于下波高|A3A4|,偏心波纹管软体致动器充入气体后上、下伸长率不同,致动器将产生弯曲变形。偏心距为0和大于0的2款椭圆形波纹管软体致动器在0.06 MPa正压驱动下的变形仿真结果如图6所示,可以看出当偏心距大于0时软体致动器明显弯曲变形,通过有限元仿真分析可得偏心距为0.6 mm。

图5 偏心波纹管致动器结构

图6 偏心波纹管软体致动器充气状态
1.2.2 参数及材料确认
考虑本研究设计的手部功能康复训练装置的使用对象,通过查阅人手相关统计数据[11]可知,成年人的手指关节直径通常为18~22 mm。为了使相邻手指背部的软体致动器不发生干涉并且减少软体致动器在正压驱动下的径向变形,将软体致动器波峰椭圆的长轴、短轴长度分别设计为16.5、14.5 mm;波谷椭圆的尺寸直接影响软体致动器周向的波高大小,参考文献[5]设计的软体致动器波高尺寸,本研究将波谷椭圆的长轴、短轴长度分别设计为8.8、8.1 mm;软体致动器整体长度L参考表2人手手指各指骨长度,并且考虑软体致动器在正压驱动手指弯曲时需要一定的伸长量提供输出力,因此将软体致动器的自然长度取为人手指指骨最长长度的1.5倍,约为44.0 mm。最终确定的软体致动器结构部分参数见表3所列。

表3 偏心波纹管软体致动器结构参数 单位:mm
1.3 软体制动器的制造
本研究采用的软体致动器制作方法为目前工业生产中十分成熟的中空吹塑工艺,其主要原理如图7所示。

图7 中空吹塑工艺原理
按照优化后得到的数据绘制偏心波纹管软体致动器整体三维模型,如图8a所示;根据该三维模型,通过数控加工得到相应的中空吹塑模具,如图8b所示;最终加工出的偏心波纹管软体致动器实物如图8c所示。
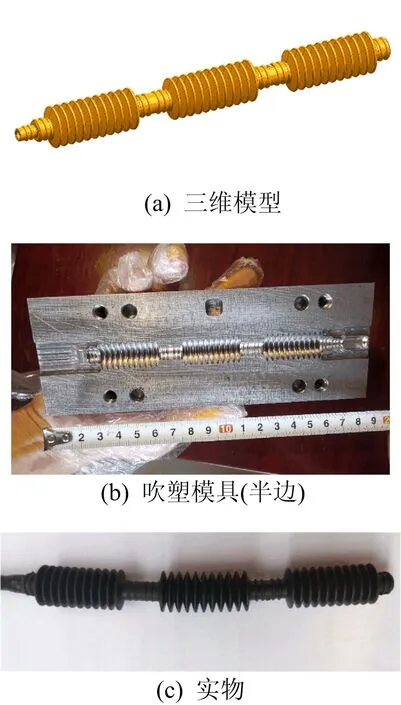
图8 偏心波纹管软体致动器三维模型、吹塑模具及实物图
2 手部康复软体机器人的设计
2.1 控制系统设计
软体机器人控制系统设计框图如图9所示(其中SPI为全双工同步串行总线,是微处理控制单元MCU与外围设备之间进行通信的同步串行端口)。弯曲传感器能够检测患者手指的弯曲程度,其中与主机连接的5个弯曲传感器分别位于患者患侧5个手指的背部,与数据手套连接的5个弯曲传感器则分别位于患者健侧5个手指的背部。数据手套将患者健侧手指的弯曲情况通过WIFI模块传送至主机,主机将接收到的健侧手指弯曲数据与采集到的患侧手指弯曲数据进行对比,控制电磁阀对软体致动器的充气和吸气气路进行切换,从而调整手指的弯曲程度,当2组数据在误差范围内达到一致时,关闭软体致动器的充气及吸气气路进行保压,从而实现对手指弯曲程度的控制。

图9 软体机器人控制系统整体设计框图
2.2 手部康复软体机器人装置
首先完成康复手套和数据手套的组装。制作好的康复手套如图10a所示,其质量为180 g,数据手套如图10b所示,其质量仅为82 g。

图10 康复手套和数据手套
手部康复软体机器人装置在自然状态下的整体实物图如图11所示。
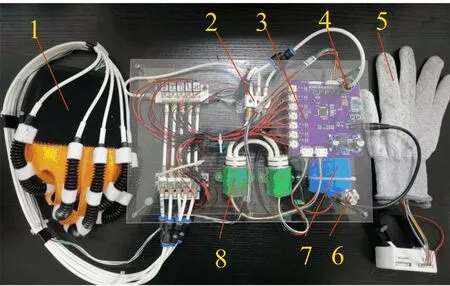
1.康复手套 2.微型电磁阀 3.主机电路板 4.气压传感器
手部康复软体机器人包含康复手套、主机、数据手套以及软件,调试好的软件程序已经通过SWD下载线写入主机电路板芯片中。该机器人装置采用双泵串联提供气源,能够输出最大正压140 kPa,最大负压-80 kPa,装置总质量约2.4 kg,整体尺寸为300 mm×200 mm×50 mm,实测使用时间2 h左右,因此该装置具有较好的便携性和续航能力,可以在家庭、医院以及康复中心等场合用于手部功能障碍患者的康复训练。患者使用时首先将康复手套佩戴在患侧手部,将数据手套佩戴在健侧手部,然后依次打开主机以及数据手套的电源,通过主机上的按键切换训练模式为镜像康复训练模式或非镜像康复训练模式,即可开始进行辅助康复训练。
3 实 验
3.1 致动器实验
3.1.1 气压弯曲角度实验
通过电气比例阀调节软体致动器的驱动气压从0 kPa缓慢增加至60 kPa,通过固定相机拍照记录软体致动器不同气压下的弯曲变形。测得软体致动器不同驱动气压时的弯曲角度数据,并将实验数据连同有限元仿真数据绘制成点线图,如图12所示。

图12 气压弯曲变形仿真与实验结果对比
从图12可以看出:在驱动气压从0 kPa升至20 kPa时,偏心波纹管软体致动器的弯曲角度增加较快;当气压升至20 kPa以上时,致动器弯曲角度的增加相对比较缓慢;气压为60 kPa时,实验测得的软体致动器弯曲角度为56°。这表明该软体致动器具有较好的弯曲能力,同时实验数据与有限元仿真数据的平均偏差仅为4.41°,验证了有限元仿真的准确性。
3.1.2 气压输出力实验
正压-输出力的实验结果如图13a所示。从图13a可以看出,软体致动器对铰链端部施加的输出力大小随气压增大而增大,且输出力大小与气压近似为线性关系,当驱动软体致动器的气压为140 kPa时,输出力为4.456 6 N。

图13 正压-输出力、负压-输出力实验结果
负压-输出力的实验结果如图13b所示。从图13b可以看出,软体致动器对铰链端部施加的输出力大小随负压增大而增大,方向与正压时的输出力方向相反,输出力大小同样与气压近似为线性关系。
负压-输出力的曲线斜率比正压-输出力曲线的斜率略大,出现这一现象的原因为在负压作用下,波纹管负压收缩时没有产生径向方向变形,其驱动力主要表现在轴向方向上;而正压作用时,由于径向膨胀使得波纹管的轴向方向上的力有所减小。当驱动软体致动器的气压为-80 kPa时,输出力为-2.806 3 N。
3.2 指尖输出力实验
指尖输出力实验如图14所示。

图14 指尖输出力实验
将薄膜压力传感器粘贴在受试者手指指尖的背部中心,测量偏心波纹管对佩戴者手部的主要压力,见图14a。受试者正确穿戴好康复手套,整个实验过程中受试者手部保持完全放松状态,实验包括初始阶段、充气阶段、保压阶段和排气阶段,见图14b。
为了验证该装置提供的指尖力是否满足抓握需求,充气阶段主机控制气泵对软体致动器持续加压至最大输出正压140 kPa,保压阶段采集薄膜压力传感器的输出电压,以获取实验过程中软体机器人康复手套的各指尖输出力。各手指指尖输出力曲线如图15所示;各手指保压阶段指尖输出力统计分析见表4所列。

表4 各手指保压阶段指尖输出力统计分析 单位:N
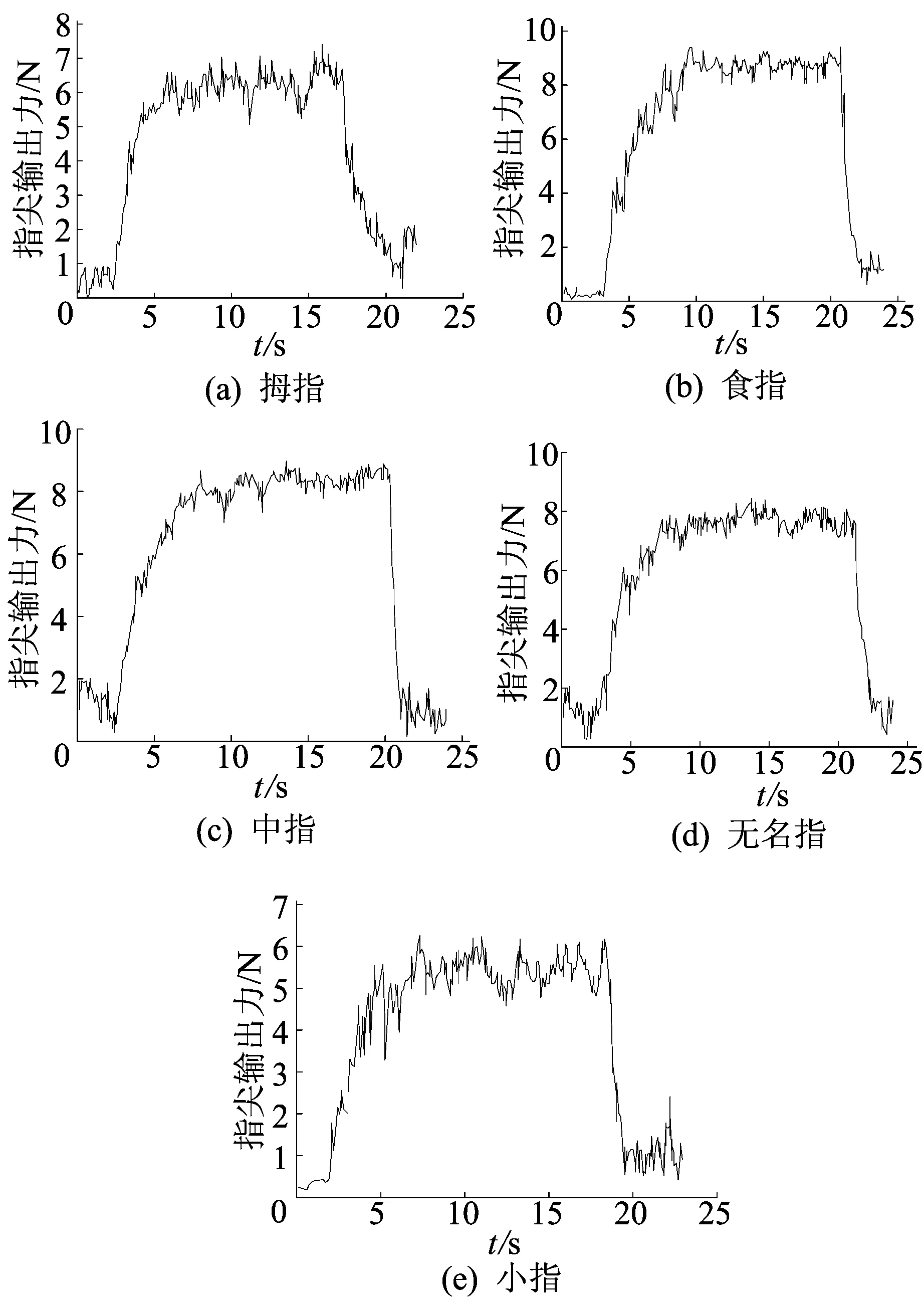
图15 各手指指尖输出力曲线
从图15可以看出,食指、中指和无名指的指尖输出力曲线较为相似。在保压阶段,食指、中指和无名指的指尖输出力平均值分别为8.79、8.26、7.67 N,拇指和小指的指尖输出力平均值分别为6.25、5.41 N。日常生活中通常只需5 N左右的力即可满足抓握物体的基本需求[12],实验结果表明本研究设计的软体机器人能够辅助使用者抓握常见物体;在保压阶段各手指的指尖输出力波动较小,其标准差最大值仅为0.51 N,表明该软体机器人系统输出力的稳定性良好。
3.3 手部康复软体机器人系统实验
被动康复训练模式实验如图16所示。受试者正确佩戴好软体机器人康复手套,实验过程中规定受试者手部始终处于放松的状态,完全依靠康复手套驱动受试者的手部进行运动,实验内容主要包括伸掌和握拳动作。
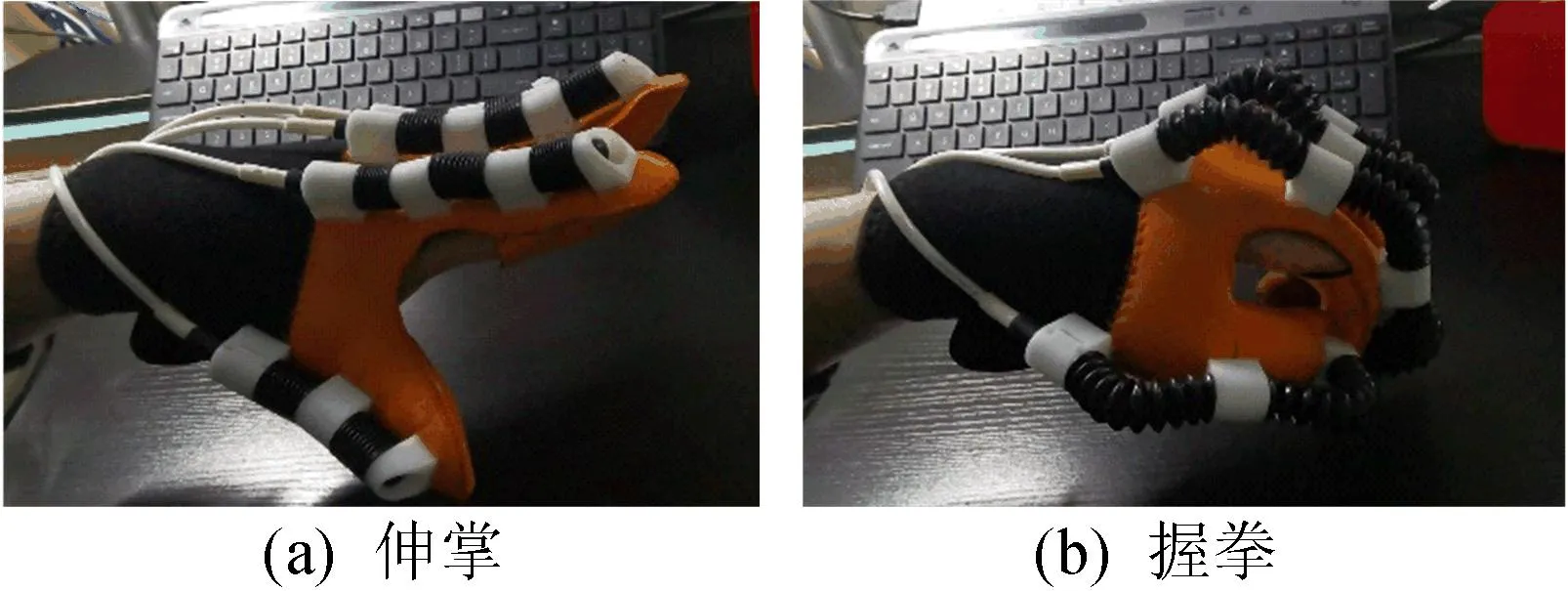
图16 被动康复训练模式实验
从图16可以看出,在被动康复训练模式下,康复手套能够在主机的控制下辅助受试者手部进行被动握拳、伸掌训练。
镜像康复训练模式实验中,受试者右手、左手分别模拟患者健侧、患侧手部。
首先,进行不同弯曲角度控制实验。受试者仅右手佩戴数据手套,调整好弯曲传感器位置与各手指背部对应,通过弯曲传感器测得右手缓慢握拳时的弯曲角度,主机根据获得的右手弯曲角度数据控制康复手套实现相同弯曲角度,实验结果如图17a所示;同时佩戴康复手套和数据手套,佩戴康复手套的左手保持完全放松状态,右手通过数据手套辅助左手弯曲相同角度,进行辅助康复训练,实验结果如图17b所示。

图17 镜像康复训练模式下不同弯曲角度控制实验
然后,进行分指控制实验。受试者首先仅右手佩戴数据手套并做出日常手势动作,观察康复手套能否复现右手动作,实验结果如图18a所示;受试者同时佩戴康复手套和数据手套,通过佩戴数据手套的右手控制康复手套进行辅助康复训练,实验过程中受试者左手同样始终保持放松状态,完全依靠康复手套的驱动力进行手部运动,实验内容包括日常各种手势动作,观察康复手套能否辅助受试者左手复现右手动作,实验结果如图18b所示。
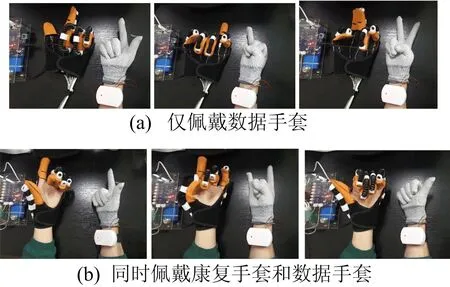
图18 镜像康复训练模式下分指控制实验
图17、图18表明,在镜像康复训练模式下,康复手套能够辅助受试者左手复现佩戴数据手套的右手做出的不同弯曲角度和各种手势动作,能够进行镜像康复训练;其中分指控制实验验证了本研究设计的单气源分指控制气动系统的可行性。系统实验结果表明,本研究装置达到设计要求,基本能够满足手部功能障碍患者的康复训练需求。
4 结 论
基于软体制动器的特点以及手部功能康复训练的需求,本文提出一种偏心波纹管软体致动器结构,设计其波峰、波谷中心存在一定的偏心距,使得致动器在正压驱动时由于上、下伸长率不同产生弯曲变形,减少制动器变形过程中能量消耗,提高对手指的驱动能力;通过实验确定在制作工艺范围内的最优结构参数,并完成软体致动器的制作。气压-弯曲角度和气压-输出力实验结果表明,该软体致动器具有较好的弯曲能力和驱动能力;指尖输出力实验结果表明,各手指力均不小于5 N。抓取实验以及镜像训练实验表明,本研究设计的手部康复机器人具有较好的稳定性和顺应性,能够辅助受试者患侧手部复现健侧手部动作,实现不同弯曲角度控制以及分指控制功能,基本能够满足手部功能障碍患者的康复训练需求。
猜你喜欢
军事文摘(2024年4期)2024-01-09
氮肥与合成气(2021年12期)2021-12-04
上海交通大学学报(2021年2期)2021-03-02
军事文摘(2020年24期)2020-11-29
橡塑技术与装备(2018年14期)2018-07-20
科技风(2018年31期)2018-07-09
光学精密工程(2016年6期)2016-11-07
光学精密工程(2016年5期)2016-11-07
科技资讯(2016年8期)2016-05-14
中国房地产业(2016年2期)2016-03-01
