
同步辐射光源新增线站相关加速器安装与调试
2024-03-25 08:55:46焦广为田顺强相升旺朱亚刘新忠吴帅
核技术 2024年3期
焦广为 田顺强,2 相升旺 朱亚 刘新忠 吴帅
1(中国科学院上海高等研究院 上海 201204)
2(中国科学院上海应用物理研究所 上海 201800)
上海光源(Shanghai Synchrotron Radiation Facility,SSRF)是我国第一台中能第三代同步辐射光源,于2009年5月正式开放运行,总体性能位居国际同类装置先进水平。光源加速器由一台150 MeV直线加速器、一台150 MeV~3.5 GeV增强器、一台3.5 GeV储存环及两条输运线组成。上海光源每年开机约7 000 h,其中实验供光约4 500 h。运行期间,装置稳定高效运行、性能不断提升,加速器开机率(Availability)、平均无故障运行时间间隔(Mean Time Between Failures,MTBF)、平均故障修复时间(Mean Down Time,MDT)等主要运行指标处于同类装置的国际先进水平[1-2]。2016年上海光源线站工程(二期工程)[3]开工建设,至今已建成了一批具有国际竞争力的高水平线站,项目于2023年开始正式运行。目前上海光源共有34条光束线46个实验站开放运行[1-2,4]。
上海光源后续线站项目是指目前正在建设的,由相关单位出资建设的用户线站项目,旨在满足特定用户的科学前沿研究和工业应用研发需求,为上海光源提供具有更多用途的光束线站。其中有两条光束线是基于储存环第4个直线节安装的两台双斜角插入件(即使用三块小二极铁使束流经过这两台插入件时的路径存在双斜角,使在同一直线节上的两台插入件发出的光子束足够分离,以同时向两条束线供光),该束线站是旨在解决材料和能源重大问题的基础性多功能研究平台。在实际工程实施中,项目组克服了一系列的技术和管理上的挑战,确保了项目的顺利进行。本文以此为切入点,探讨这一关键环节中的主要挑战、应对策略及取得的成果。
1 插入件介绍
插入件(Insertion Devices,IDs)是一种特殊的磁铁组合,其磁结构按周期性排列,如图1所示。插入件主要分为两类:波荡器和扭摆器。由于它们产生的同步辐射光具有不同的特点和应用需求,因此它们对磁场的要求也有所不同。对于扭摆器,其主要关注特征能量和辐射功率等参数。扭摆器通常需要具有较高的峰值磁场,以获得较高通量的光束,而波荡器一般追求辐射光的单色性和高亮度等特性。通常情况下波荡器的周期长度较短,周期数相对较多。上海光源的插入件包括多种类型,如常规扭摆器(Wiggler)、真空内波荡器(In-Vacuum Undulators,IVUs)[2]和椭圆极化波荡器(Elliptic Polarized Undulators,EPUs)[5-6]等常规插入件,以及超导扭摆器(Superconducting Wiggler,SCW)[7]、低温永磁波荡器(Cryogenic Permanent Magnet Undulators,CPMU)[8]等,目前共计24台,其中有12台是双斜角安装的插入件(Double Canted IDs)[8]。这些插入件在上海光源的束线工程中发挥了重要作用,为各种研究提供了多样化的高品质同步辐射。

图1 插入件磁排列示意图Fig.1 Schematic diagram of the magnet array of the insertion devices
上海光源后续线站项目中有两条用户线站需要在储存环的第4段直线节安装了一台常规扭摆器(Wiggler)和一台真空内波荡器(In-vacuum Undulator,IVU),图2为这两台插入件的安装机械图,表1为Wiggler和IVU设计参数。其中扭摆器周期长度为100 mm,可调节的磁隙范围在15~100 mm之间,峰值磁场强度为1.58 T。Wiggler全气隙中,±16 mm横向范围内,Bx与By一次积分场波动在± 40 Gs·cm以内,多极场分量均满足要求;二次积分场均在±12 000 Gs·cm2以内。真空内波荡器周期长度为20 mm,可调节的磁隙工作范围在6~30 mm之间,峰值磁场为0.84 T。IVU全气隙中,±16 mm横向范围内,Bx与By一次积分场波动在±50 Gs·cm以内,多极分量均满足要求;二次积分场均在±10 000 Gs·cm2以内,满足设计要求。图2中A标识了生成双斜角的三块小二极铁,双斜角的最大值一般由锯齿墙出光孔的大小确定,最小角度一般由两条光束线元器件安装位置得以足够分离的空间来确定[9-10],该段直线节的两台插入件的夹角为8 mrad,与直线节中心线夹角分别为4 mrad,束流轨迹向储存环内偏,其中IVU位于上游,Wiggler位于下游。图2中B标识了两台插入件轨道扰动前馈补偿线圈,均为水平和垂直组合的线圈,其中中间一个为两台插入件共用。

表1 扭摆器和波荡器参数Table 1 Wiggler and IVU parameters

图2 第4段直线节双斜插入件安装布置图(左侧为IVU,右侧为扭摆器,A表示生成双斜角的小二极铁,B表示插入件轨道扰动补偿线圈)Fig.2 Mechanical diagram of the installation of the double-canted insertion devices in the fourth straight section(The left side is the IVU and the right side is the Wiggler.A represents the small diode that generates the double-canted angle,and B represents the closed-orbit distortion compensation coil of the ID)
图3为使用SPECTRA程序[11]计算的IVU20和Wiggler100的光谱图。其中IVU的最高亮度为3 keV时的5.86×1019Photon·s-1·mm-2·mrad-2·(0.1%B.W.)-1,而能量为10 keV的光子亮度为2.18×1019。扭摆器的最高通量为3 keV时的2.75×1015Photon·s-1·(0.1%B.W.)-1,能量为10 keV的光子通量为1.92×1015,30 keV的光子仍具有4.50×1014的通量。

图3 04IVU和04Wiggler光谱亮度(a)与通量(b)Fig.3 Spectral brightness (a) and flux (b) of 04IVU and 04Wiggler
2 插入件安装工作
本节将介绍插入件的安装工作,详细讨论在安装过程中遇到的问题以及相应的高效解决方案。具体安装过程如下所示:
1)安装过程首先从拆卸直线节的原有设备开始。设备拆卸完毕后,由机械系统执行插入件的地脚划线、吊装和准直操作,具体流程如下:
(1) 插入件标定,利用激光跟踪仪测量插入件磁组件安装面的几何中心、基准线或基准面,根据相互关系,建立插入件本体坐标系,将插入件几何中心转移到插入件机架的靶标孔上,用以现场安装;
(2) 按设计图纸,根据插入件安装位置前后四极铁中心建立局部坐标系,得出在局部坐标系下插入件地脚坐标及靶标安装坐标;
(3) 利用激光跟踪仪进行安装现场控制网测量,建立与设计图纸对应的局部坐标系,根据图纸地脚坐标进行地脚划线打孔;
(4) 插入件吊装粗就位,利用激光跟踪仪根据靶标安装坐标对插入件位置进行精确调整,调整完成后靶标实际坐标与安装坐标差值小于0.1 mm。
2) 真空连接、检漏和烘烤。
3) 完成隧道内工艺接线。
4) 机电联调以及控制界面的远程调试。
在正式开始安装工作前,项目组应对插入件进行详细的设备测试,包括机械运动测试、磁场测试和垫补、真空度测试等,确保其静态指标满足设计要求。其中机械运动测试主要对插入件的磁间隙运动控制进行测试,IVU和Wiggle的GAP运动范围分别为6~30 mm和15~100 mm,定位精度好于±1 μm。磁场测试和垫补包括磁场点测和线测,通过点测测试插入件磁场的峰值磁场和相位误差,通过旋转线圈测试插入件的磁场一、二次积分,结果均满足指标要求,如表1中所示。真空度测试主要是IVU离线极限真空测试,真空度好于5×10-8Pa,也满足离线真空度要求。同时需确保对备品和备件有充足的了解,选择经验丰富的技术人员,以减少不必要的成本并降低潜在风险[12]。具体问题分析如下:
1)真空盒工艺误差。此类问题常见于插入件安装阶段,施工人员在安装过程中发现真空盒尺寸误差较大,出现焊疤等具体情况。此类情况发生后,由项目组现场评估,一般采取现场再加工或返厂维修更换等措施。后续线站项目曾经发生过真空盒焊缝处尺寸超差1.5 mm的情况,安装人员通过现场再加工,去除多余焊缝厚度,保证真空盒总体高度误差满足±0.5 mm要求。
2)安装任务冲突。在实际操作过程中,受隧道内有限空间影响,并行任务往往出现互相干扰的情况,如在抽真空过程中不能同时进行工艺桥架改造和接线。后续线站项目在安装插入件前期需排定项目优先级,过程中遇到问题现场及时协调解决的方式,有力地减少了此类问题的发生。
3)项目安装超期问题。安装过程的突发问题会带来超期问题,如上文所介绍的真空盒工艺误差问题曾导致安装任务延期两天的情况。因此,原则上项目组应事先对风险进行深入评估,做好预案以应对此类问题。表2为项目组估算的后续线站项目安装阶段部分风险项及其预案。

表2 后续线站项目安装阶段风险项与预案Table 2 Risk items and contingency plans during the installation phase of subsequent beamline projects
3 插入件调试工作
插入件是由周期性磁铁排列组成,理想情况下电子通过插入件的磁场积分为零。而实际情况中,受到制造工艺、安装精度的制约,插入件的实际磁场存在不可避免的误差,一次积分场和二次积分场不再为零,且随着插入件间隙变化而变化。在调整插入件的磁间隙(gap)和相位(phase)时,一次磁场积分误差导致的电子轨迹角度偏移和二次磁场积分误差导致的位置偏移,必然会使束流闭合轨道产生偏离,对加速器的运行性能造成影响。由于上海光源的储存环包含多个插入件,每个插入件在运行时引发的轨道扰动各不相同,这对储存环的轨道稳定性产生了显著影响[13-14]。为尽量克服此问题,我们采用了轨道前馈补偿法[4,15-16]。
插入件轨道前馈补偿法是指通过在插入件两端设置校正子,局部补偿插入件调节过程中造成的闭轨扰动,从而尽可能消除其对储存环轨道稳定性的影响[16]。由于插入件对轨道扰动的重复性较好,实际调试中可以通过建立前馈表的方式来进行补偿。根据插入件的特性,前馈表分为一维(平面型插入件)和二维(如椭圆极化波荡器)两种,主要包括gap和shift值及所对应的校正子补偿量。平面型插入件仅有磁间隙一个变量,因而其前馈表是一维表。但椭圆极化波荡器插入件不仅可以调节磁间隙,还可以调节磁极的纵向相对位置,因此需要测量二维前馈表。通常情况下,扭摆器的积分场相对较大,对束流动力学造成的扰动也较大。相比扭摆器,真空内波荡器一般对束流的轨道扰动较小。
第4段直线节的插入件轨道前馈校正子如图2中所示,其中中间的校正线圈为两台插入件共用,前馈补偿量为两台插入件设置值的叠加。我们利用基于响应矩阵的梯度下降法对IVU和Wiggler进行了轨道前馈表的测量,结果如图4所示,其中包括IVU和Wiggler轨道补偿前后的全环扰动量(图4(a))和4个前馈电源与gap的变化关系(图4(b))。表3列出了IVU和Wiggler加与不加轨道前馈时,对束流轨道的扰动量(全环均方根值,Root-Mean-Square,RMS)。图4中,实线表示未加轨道前馈前的水平和垂直轨道畸变的RMS值;虚线则表示加轨道前馈后的水平和垂直轨道畸变的RMS值;En-HorCC和En-VerCC分别表示插入件入口的水平和垂直补偿电流;Ex-HorCC和En-VerCC分别表示插入件入口的水平和垂直补偿电流。为了确保IVU和Wiggler在不同间隙下轨道扰动都能得到较好的补偿,我们测量了IVU磁间隙从30 mm至6 mm之间的25个间隙点,对于Wiggler,测量了磁间隙从100 mm至15 mm之间的30个间隙点。

表3 IVU和Wiggler加轨道前馈前后轨道扰动汇总及积分场误差Table 3 Summary of closed-orbit distortion before and after feedforward, and the integral field errors of IVU and Wiggler

图4 轨道补偿前后IVU和Wiggler的全环扰动量(a),4个前馈电源与磁间隙的变化关系(b)Fig.4 Schematic of total disturbance momentum of IVU&Wiggler before and after orbit compensation (a), the relationship between the four feedforward power supplies and variation of magnetic gap (b)
由图4可知,在加轨道前馈校正之前,IVU对水平轨道和垂直轨道最大扰动分别为26 μm和40 μm,Wiggler对水平轨道和垂直轨道最大扰动分为36 μm和22 μm。其中,水平方向最小间隙下,轨道畸变并不是最大的原因是插入件的设计和制造过程中采用了垫补技术,降低了最小间隙时的积分场误差。经过轨道前馈校正后,IVU和Wiggler最大轨道扰动均小于2 μm。前馈电流相对于间隙变化的平滑性较好,一般可以通过插值法来补偿任何间隙的轨道扰动。总体来说,插入件轨道前馈补偿法可以有效地补偿插入件对束流闭轨的影响。
4 束流真空清洗
前端区在受到同步辐射光照射后会瞬时放气影响真空度,在正常运行中为了不因此影响供光,需要预先使用合适的老练方式(真空清洗)降低放气概率,上海光源一般在插入件和前端区安装结束后进行该工作。根据以往的经验,新增光束线站前端区真空度要达到基本不影响储存环真空度的程度,需要两到三年时间。鉴于此,后续线站项目优化了工作方案,将束流真空清洗分为被动或主动两种模式。主动模式是在储存环存在一定束流时,通过人为调节插入件磁间隙,使用同步辐射光进行真空清洗,这样可以在短时间内大幅度改善局域真空。被动模式则是拉开相应插入件,仅使储存环和前端区真空室连接后,仅靠前端区内表面缓慢放气,完成清洗过程。被动模式的优点在于安全性高、对全环的影响较小、不需要耗费专门的时间,可以和其他的工作同步进行。上海光源后续线站项目实际调试通常采用两种模式相结合的方法(被动→主动→被动)进行,这样在确保设备安全的前提下可实现最佳清洗效果。
图5为第4段直线节新增束线前端区的一次真空清洗过程。初期提升流强的过程中,操作人员密切观察该区域和全环真空度,提升完毕后通过束流decay的方式清洗真空,期间可同时进行一些机器研究工作。在清洗进行至6 h左右时,操作人员因机器研究任务进行了踢束,真空度也随之降低至最低点。束流真空清洗过程中会根据现场评估的方式不定时补注束流,保证真空清洗效果。为保证上海光源高质量供光,尽可能降低对全环真空的影响,束流真空清洗一般不宜超过12 h。完成任务后,操作人员关闭安全光闸后,前端区真空度随之降低。由图5可知,在清洗过程中,前端区真空度随着束流清洗时间增长逐步下降,200 mA流强下的真空度已由清洗开始的1.87×10-5Pa下降至9.20×10-6Pa,耗时未超过12 h。通过优化真空清洗方法,目前储存环C04前端区静态真空度已达9.78×10-8Pa,大幅提升了真空清洗效果。
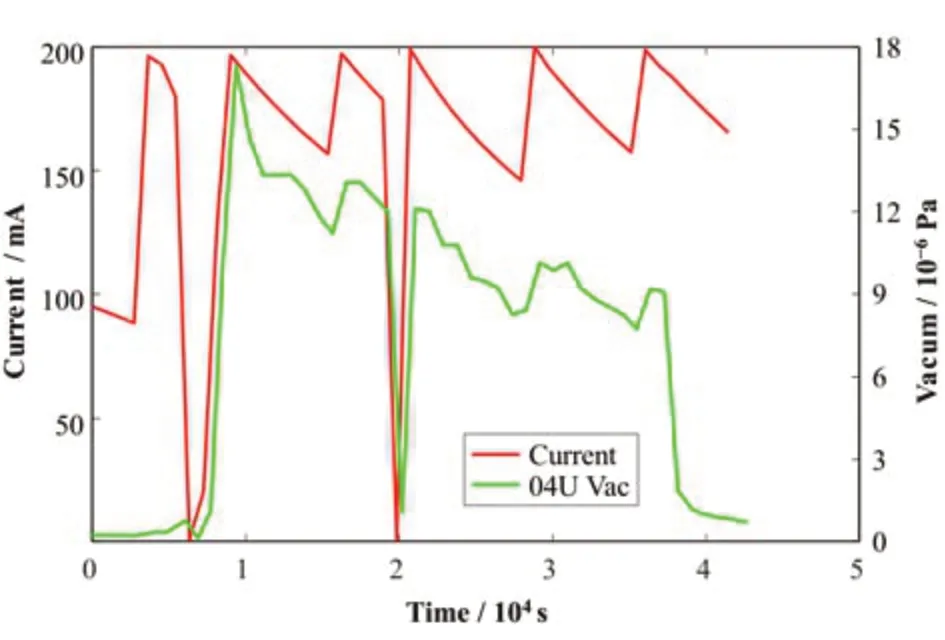
图5 新增束线工程前端区真空清洗过程Fig.5 Vacuum cleaning of the front-end area of a new beamline project
5 运行过程中遇到的问题
表4列出了上海光源投入运行以来影响光源总体供光,与束线站及前端区相关的故障,其中,联锁逻辑错误、前端区真空异常及安全光闸硬联锁是最常见的问题。这些问题在运行过程中得到了逐步解决,后续线站项目相关的事项也基于这些优化的方案来处理,因此在相应的安装调试过程中未出现过这些问题。因其经验对今后的工作比较重要,故将相关的解决方案作如下归纳。
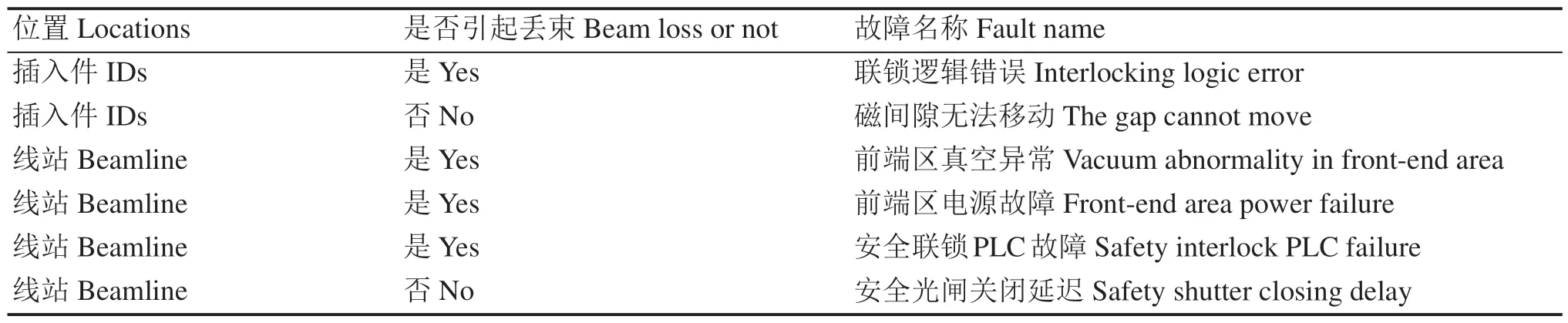
表4 线站运行过程中常见故障分析Table 4 Analysis table of common faults during beamline station operation
1)联锁逻辑错误。联锁逻辑错误在上海光源的早期工程中较为显著,同时部分设备如温度计、水流量计、真空计存在“过保护”的问题。上海光源插入件系统的联锁要求是保护插入件真空室及其对应的光束线,当插入件系统出现可能损坏设备的故障时,机器联锁系统(Machine Protection System,MPS)会采取如下措施:禁止储存环高频系统功率输出以打掉束流;禁止储存环注入系统工作;禁止直线系统电子枪触发。上海光源早期为确保安全,对可能的风险点都进行了联锁保护。然而,这样的“过保护”策略在误报警和监测元件失灵等因素的干扰下,对光源的稳定运行产生了不利影响。为解决此问题,上海光源团队对所有联锁进行了全面检查和修正,确保联锁逻辑更为合理。以插入件真空硅信号联锁为例,为避免真空设备误报警导致联锁系统打掉束流的情况,上海光源团队将联锁逻辑由单一真空硅信号联锁踢束修改为相邻两个真空硅信号联锁踢束。通过这些努力,联锁逻辑错误已大幅减少,并在2018年后几乎全部消失[17-18]。
2)前端区真空异常。这种问题的原因通常是真空泄漏或瞬间气载。此类故障影响巨大,极端情况下可能导致储存环真空破坏,包括超导腔[19]、三次谐波腔[19]、IVU在内的一系列精密装置无法运行。为保护储存环真空免受影响,故障发生后前端区自动关闭快阀和慢阀[20],同时光束线控制系统会发出真空泄漏报警信号至机器保护系统,由机器保护系统执行踢束。气载包括静态热解析气载和光电解析气载[21]。在前端运行初期,光电解吸气载较大,容易出现真空异常,经过一段时间的清洗,光致解吸气载会逐渐降低[21]。所以高质量的前端区真空清洗对新束线和光源的整体运行极为重要。因此,如第四节讨论的,上海光源后续线站项目采取了前端区主动加被动真空清洗的方案。
3)安全光闸硬联锁。为确保线站用户的安全,上海光源最初设置了安全光闸硬联锁[17]。安全光闸硬联锁要求束线前端区的安全光闸处于打开状态等情况下,禁止储存环进行常规注入。但这导致了在实际操作中,即使加速器准备就绪,但线站光闸不能及时关闭,从而导致延误。为解决此问题,上海光源在中央控制室增设了光束线站安全总闸,中控运行人员可在注束前后通过安全总闸远程强制关闭或打开所有线站安全光闸,确保了用户的安全并提高了效率。
6 结语
本文探讨了已运行光源新增束线项目中加速器部分的主要工作,包括新增光束线站插入件的设计、安装、调试和真空清洗等。在插入件设计方面,文章介绍了后续线站项目中波荡器和扭摆器的基本参数和用途。插入件安装部分全面梳理了现场安装准直工作流程,分析安装过程中常遇到的三个问题包括:真空盒工艺误差、安装任务冲突、项目安装超期等,并给出解决方案。插入件调试方面,对第4段直线节新增线站IVU和Wiggler进行轨道前馈设置的测量,IVU和Wiggler最大轨道扰动均可有效地抑制在小于2 μm的水平。该双斜插入件Wiggler的光通量和Undulator的光亮度均满足设计要求。束流真空清洗工作部分详细介绍了其意义和最优方案,后续线站项目前端区真空度达标时间大幅缩短。采用了光源运行过程中的联锁及其他优化方案,后续线站项目实施过程中,与光束线及前端区相关的故障被有效避免。
致谢本文在写作过程中得到了上海光源后续线站项目组和陈建锋老师的大力支持和帮助,在此表示感谢!
作者贡献说明焦广为负责实施研究,分析、解释数据,起草文章;田顺强负责全面指导,文章审阅修改,行政、数据支持;相升旺负责实施插入件安装和设计部分研究,图形设计;朱亚负责实施插入件安装和设计部分研究,采集、分析数据;刘新忠负责实施插入件调试部分研究,采集、分析、解释数据,修订文章;吴帅负责实施真空清洗部分研究,采集、分析数据。
猜你喜欢
能源工程(2020年6期)2021-01-26 00:55:18
原子能科学技术(2019年9期)2019-09-14 01:26:28
原子能科学技术(2019年9期)2019-09-14 01:26:28
光源与照明(2019年3期)2019-06-15 09:21:04
中国奶牛(2019年1期)2019-02-15 07:19:46
数学小灵通·3-4年级(2017年3期)2017-04-16 04:41:11
西北工业大学学报(2015年3期)2015-12-14 13:08:42
资源节约与环保(2015年9期)2015-01-27 22:25:42
原子能科学技术(2014年3期)2014-02-28 22:17:37
发电设备(2014年4期)2014-02-27 09:45:31
