采用SMA 丝的空间旋转驱动器的设计与试验
2024-03-24 09:02武子裕
中阿科技论坛(中英文) 2024年3期
武子裕
(北京航空航天大学能源与动力工程学院,北京 100191)
由于运载火箭对载荷体积的限制,航天器上许多设备在发射阶段需要收拢起来,进入轨道后由展开机构驱动至工作状态[1]。展开机构的作动方式通常为平动或转动,因此为展开机构提供动力的旋转驱动器在航天器上得到广泛应用。不同于常规驱动器,用于空间环境的驱动器更需要小型化、集成化,因此在驱动器设计过程中力求体积小、重量轻、功率密度高、成本可控[2-3]。形状记忆合金(Shape Memory Alloy,SMA)是一种形状记忆性能较好的金属智能材料[4-6]。采用SMA为动力源的驱动器结构简单紧凑、能量密度大、可靠性高、噪声低,拥有传统电机驱动器和液压驱动器所不具备的优势,是一种非常适合用于空间环境的驱动器[7-10]。
根据空间旋转驱动器的实际需求,SMA旋转驱动器通常使用非连续式的设计,其旋转角度有限,用于在给定的驱动行程内单次或往复驱动[11-12]。驱动器所使用的SMA形状种类很多,包括但不限于管/棒[13-16]、片/带[17]、弹簧/线圈[18-21]、丝[22-26]等。其中SMA丝是SMA驱动器中常用的元件形状,直接对SMA丝通电就可以使其升温变形,这使得使用SMA丝的旋转驱动器响应速度快、结构简单紧凑[12]。一种经典的SMA丝旋转驱动器如图1所示,SMA丝缠绕在圆柱筒上,一端固定在支撑底座上,另一端连接在圆柱筒上。当对SMA丝通电时,焦耳效应使SMA丝温度升高并发生相变,收缩的SMA丝拉动圆柱筒转动,转动的圆柱筒向外输出扭矩。该驱动器设计结构简单、紧凑,形状与输出方式可使驱动器直接充当铰链,受到了学者的青睐[22-23,26]。

图1 缠绕布置SMA丝的旋转驱动器
虽然在理论分析中该驱动器设计可以高效地提供理想的输出扭矩与输出行程(旋转角度),但驱动器的输出行程与缠绕在圆柱筒上SMA丝的长度有关。考虑到SMA丝与圆柱筒表面的摩擦力,在实际试验中只有部分SMA丝可以实现自由收缩[12]。为了解决这个问题,需要更为复杂的结构[22]。Huang在研究缠绕布置SMA丝的旋转驱动器时提出了一种不与旋转轴接触的轴向布置SMA丝的旋转驱动器设计。Huang认为SMA丝与中心轴接触限制了驱动器的输出行程,因此并未对该设计进行深入研究。但在缠绕式设计存在难以避免的摩擦力损耗时,应当重新考虑尽量避免SMA丝与结构件缠绕接触的设计。本文在Huang的设计基础上改进模型,对其进行深入研究。
1 模型设计
根据Huang的研究[22],本文对驱动方案进行修改,得到驱动方案如图2所示。将旋转驱动器简化为两个固定端与一个旋转盘,在固定端与旋转盘上均有可供SMA丝穿过的小孔,SMA丝两端固定在固定端上。旋转盘在外力矩的作用下转动并将SMA丝拉长,此时是驱动器开始工作前所处状态。在驱动器工作时,加热SMA丝使驱动器开始驱动,SMA丝长度缩短,拉动旋转盘逆外力矩转动。在与旋转轴距离相同的圆柱面上,SMA丝的受力变形条件相同,所以可以在同一圆柱面内布置多组SMA丝同时驱动,以提升驱动力。不同于将SMA丝缠绕在圆柱面上的布置方式,将这种布置方式称为非缠绕式轴向布置。

图2 驱动方案原理示意图
2 模型分析
根据图2所示驱动方案,可得驱动器受外力发生转动后所处的状态,如图3所示。当旋转盘上SMA丝孔处于a点时,SMA丝未发生变形,SMA丝原长刚好是两个固定端的距离2H,此时该模型理论输出行程最大[22]。当旋转盘受到外力矩M的作用开始旋转角度θ时,旋转盘上的SMA丝孔从a点转动到b点,SMA丝被拉长变形,产生应变ε,长度从2H变为2L。给SMA丝通电加热,SMA丝发生相变变形,SMA丝在缩短的过程中拉动旋转盘转动,最终于弧ab上a、b点之间的一点上达到受力平衡,并停止驱动。

图3 驱动器几何、受力关系示意图
由于在旋转盘两侧SMA丝的受力与变形存在对称关系,所以下文的几何受力分析主要关注旋转盘一侧的情况。从图3中可见,△abc(ca为SMA丝原位置、cb为SMA丝变形后位置、ab为SMA丝变形后在旋转盘上的投影)和△oab(oa为原位置时安装孔与旋转轴连线、ob为变形后安装孔与旋转轴连线)可以将SMA丝的应变与旋转盘转动角度关联起来,其关系式为
式(2)中,HS是考虑到实际装配时盘厚度与安装所需导致增加的SMA丝长度,在试验时其为一个固定值。
因此,驱动器旋转角度θ与SMA丝应变ε的对应关系受到安装半径R与长径比H/R的影响。如图4所示,SMA丝应变与驱动器旋转角度并非线性关系。SMA丝在负载情况下相变应变通常只有4.5%左右,根据负载的变动该范围的大小与在应变轴上的位置会有所变化。对不同的尺寸参数,SMA丝应变所对应的驱动器旋转角度不同:当SMA丝安装半径增大时,SMA丝应变与驱动器旋转角度关系曲线右移,意味着驱动器要旋转到一定角度需要SMA丝有更大的应变;当驱动器长径比增大时,SMA丝应变与驱动器旋转角度关系曲线左移。此外,通过在固定盘间的变形区域外布置更大比例的SMA丝可以提升SMA丝应变对应的驱动器旋转角度。

图4 SMA丝应变和驱动器旋转角度关系
式(1)中,Lab为变形后SMA丝在旋转盘上投影ab的长度。考虑到试验时的实际情况,可以得到SMA丝应变与驱动器旋转角度的关系:
根据图3,由SMA丝(横截面积为)应力提供的拉力2FS投影到旋转盘上成为力F1,F1的方向沿直线ab,仍需要将F1向圆盘切向分解才能得到提供扭力矩的力F。所以对驱动原理的受力分析有
联立后可得应力σ与输出扭矩MF的关系式:
对于考虑实际情况的参数验证平台,其受力关系未发生改变,故SMA丝应力与输出扭矩关系式仍为式(4)。由式(4)可见,当采用直径更大的SMA丝时,SMA丝的截面积增大,相同应力下的输出扭矩增大,所以当驱动器输出扭矩不足时可以换用更粗的SMA丝来提升输出扭矩。要想更有效地提升驱动器的输出扭矩,可以选用更粗的SMA丝或者增加工作的SMA丝的组数,所以讨论不同参数对输出扭矩的影响时,我们更关心在同一载荷下驱动器的驱动行程如何变化,以及载荷变动后相较于变动前驱动器的驱动行程如何变化。驱动器长径比H/R和SMA丝安装半径R同样是影响输出扭矩的关键参数。根据式(2)和(4)得到由SMA丝应变和应力表示的驱动器平衡曲线,图5为载荷扭矩为54.88 N·mm、单组SMA丝的不同尺寸驱动器的平衡曲线图。

图5 尺寸参数变化对驱动器平衡曲线的影响
平衡曲线表示在SMA丝某一应变时,驱动器平衡所需的SMA丝应力,当SMA丝的实际应力大于平衡所需应力,即在平衡曲线上方时(如图5中阴影区的曲线3),SMA丝可以克服外载荷的作用驱动旋转驱动器转动,直至SMA丝应力再次落到平衡曲线上,驱动器受力平衡,驱动结束;当SMA丝的实际应力小于平衡所需应力,即在平衡曲线下方时,SMA丝所提供的力无法平衡驱动器所受外载荷,旋转驱动器会在外载荷的作用下发生旋转,直至SMA丝应力再次落到平衡曲线上或受到限位机构影响,驱动器受力平衡,达到稳定状态。
对整个驱动过程来说,危险点只有驱动初始点,此时所需的SMA丝应力最大,当驱动器开始回转后,驱动器平衡所需的SMA丝应力减小。所以对驱动器的驱动过程只需关注两点:(1)开始驱动时能否顺利启动,当驱动器顺利启动后必然可以驱动到平衡曲线与高温拉伸曲线的交点处;(2)平衡曲线与高温拉伸曲线的交点处的应变值,为了获得更大的驱动行程,希望驱动到位时的SMA丝应变尽量地小。
对单组SMA丝的不同尺寸驱动器将载荷扭矩增加109.76 N·mm时的平衡曲线如图6所示。由图6可见,当驱动器的外载荷增大后,平衡曲线整体上移,平衡曲线随参数变化的变化趋势未发生明显变化。在这种情况下,当U形曲线的跨度不够大时,SMA丝低温拉伸曲线与平衡曲线无交点,即SMA丝无法平衡外载荷,驱动器在外载荷作用下发生作动直到限位机构限制其转动。

图6 载荷增大后尺寸参数变化对驱动器平衡曲线的影响
上述分析只是旋转盘转动角度θ小于一定值时的情况,当对SMA丝与中心轴做好绝缘防护时,可以进一步考虑SMA丝与中心轴缠绕的情况。图7为驱动原理模型的轴向视角,当旋转盘转动角度θ足够大时,SMA丝会与中心轴发生干涉,此时需要进行新的分析。a、b所在圆半径为R,中心轴半径为r,当SMA丝与中心轴相切时存在

图7 SMA丝与中心轴接触(左)和SMA丝缠绕在中心轴上(右)
当驱动器角度θ继续增大,会有一段SMA丝缠绕在中心轴上,此时如图7右图所示。SMA丝被分为三段,因为SMA丝不受除固定端、旋转盘和中心轴之外的影响,所以未与中心轴发生干涉的两侧SMA丝对称,长度均为l1,轴向尺寸均为h1,中心盘上投影长度均为d1,所以此时有
而与中心轴缠绕段SMA丝则为一段螺旋线,假设其长度为l2,轴向尺寸为h2,在中心盘上投影为一段圆弧,其弧长为d2,如图8所示。螺旋线沿圆柱面展开为一条直线,并且该直线与轴线投影和展开的圆截面投影共同构成一个直角三角形,三角形顶角由H和L决定,如图8所示。对于中心轴缠绕段SMA丝有

图8 缠绕在轴上的SMA丝分段示意图
因为未受其他外力影响,所以沿圆柱面展开后的SMA丝和未与中心轴接触的SMA丝的斜率相同,三段SMA丝仍然可以组成一条线段,如图8所示。对此时的SMA丝有
因为与中心轴缠绕段SMA丝的存在,相当于改变了SMA丝的固定端,此时只需分析靠近旋转盘的未与中心轴接触段SMA丝与旋转盘的相互作用力即可。该状态下式(3)中的θ1、θ2变为θ1'、θ2',则有
由式(9)可知,当SMA丝缠绕在中心轴上后,驱动器的受力状态会发生改变,输出力矩的大小与角θ1'和有关。在SMA丝缠绕在中心轴上后,中心盘的旋转角度增大只能使角和'改变,因此通过SMA丝与中心轴的接触反而能够解决驱动器旋转角度过大时输出力矩衰减的问题。
图9为5 mm直径的中心轴对SMA丝应变与驱动器旋转角度关系造成的影响。可以看到,与中心轴发生干涉不会对应变较小处(即驱动到位处)的曲线造成影响,而应变较大处(即未驱动处)的曲线斜率会变大,使驱动器在SMA丝有限的应变变化范围内转过更大的角度。由图10可知,当驱动器的中心轴与SMA丝发生干涉后,原本应该上升的平衡曲线右支转变为下降曲线,使得驱动器在SMA丝充分变形时达到自平衡能够实现。由式(5)可知,增大中心锥半径r可以减小临界角度,使图10中的分叉点沿曲线左移。

图9 考虑直径5 mm中心轴的应变-角度关系曲线
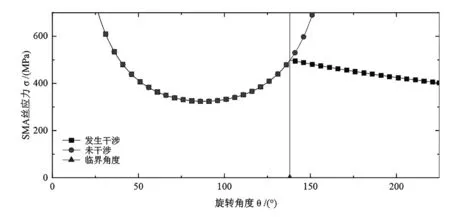
图10 考虑直径5 mm中心轴的干涉对平衡曲线的影响
对缠绕式布置和非缠绕式轴向布置SMA丝设计的输出能力进行简单对比,假设SMA丝均布置在半径相同的圆柱面内,布置SMA丝的圆柱高度相同,如图11所示。假设缠绕式轴向布置SMA丝的旋转驱动器的SMA丝呈螺纹状布置,螺距为10 mm;非缠绕式轴向布置SMA丝的旋转驱动器采用8组SMA丝同时驱动,则相关数据对比如表1所示。其中,SMA丝原长是指在该布置方式下所需安装的未变形SMA丝的长度;SMA丝应变变化是指驱动器旋转90°时SMA丝改变的应变(驱动器从135°旋转至45°)。

表1 两种SMA丝布置方式数据对比
可见,对于相同尺寸的两种SMA丝布置方式的旋转驱动器来说,所需SMA丝长度相差不大,驱动器同样旋转90°,非缠绕式驱动器内的SMA丝应变变化量差不多是缠绕式驱动器内SMA丝应变变化量的两倍,意味着缠绕式驱动器能够实现更大的驱动行程。但是缠绕式布置使得SMA丝占用过大的空间,而非缠绕式布置方式允许在同一圆柱面内布置多组SMA丝,同时布置8组SMA丝时两种布置方式所需SMA丝长度相差不大,非缠绕式驱动器输出扭矩极大增加。考虑到非缠绕式布置尽量避免产生较大的摩擦力,这会使得两种类型的驱动器的输出扭矩的差距进一步扩大。
3 试验测试
试验台如图12所示。通过在中心轴上粘贴绝缘胶布和在SMA丝外加装塑胶绝缘管,SMA丝在接触转轴后不会发生短路,仍然可以进行驱动。通过调整验证模型的几何尺寸可以测试各参数变化对驱动器的影响。图13为参数验证试验测得的驱动器角度随时间增加的变化曲线,横坐标为时间轴,每次循环的时间为40 s。驱动器旋转角度初始处于170°左右,通电驱动后驱动器迅速转动至40°~50°,结束通电后驱动器角度增大,在70°左右时驱动器到达图5所示左侧平衡点,此时SMA丝尚未充分变形。当施加一定的预载荷后,驱动器角度继续增大,撤去预载荷后重新平衡在170°左右。

图12 驱动方案验证试验台

图13 施加预变形后驱动器角度变化曲线
图12 驱动方案验证试验台测试结果与上述理论分析一致:中心轴的干涉改变SMA丝受力情况,扩大驱动器的驱动行程;在同样的负载下,安装半径R越小,驱动行程越小,这主要是因为安装半径减小导致力臂变短,驱动器SMA丝应力与输出扭矩转化效率降低;SMA丝的相变应变随驱动器长径比H/R减小而增大,但驱动行程却减小,这主要是相同的应变变化在驱动器长径比减小后对应的驱动行程减小所致。
根据试验结果设计圆柱形旋转驱动器及试验平台如图14所示,将中心轴、旋转盘与两个固定盘及相关连接件安装在直径20 mm的圆柱形外壳内,4组SMA丝驱动中心轴与圆柱外壳相对旋转。如此设计的驱动器可以在充当铰链连接底座与载荷的同时驱动两者相对转动。设定SMA丝未受力变形时驱动器的旋转角度为0°,调整安装角度可以使驱动器在不同的角度区间内转动,通过限位螺丝限制驱动器的转动范围。在与驱动器连接的平板上安装倾角传感器与300 g载荷,驱动器可以驱动平板及其上的载荷由竖直状态旋转90°至水平状态。

图14 驱动器测试试验平台
去除驱动器上的限位与外载平台,在驱动器外壳上缠绕钢丝绳,钢丝绳一端连接输出端的螺纹孔,另一端绕过定滑轮连接砝码,通过缠绕在驱动器外壳上的钢丝绳提供恒定扭矩,测量砝码的位移可得驱动器的旋转角度,如图15所示,去除限位后该试验台可以对驱动器进行循环疲劳测试。选取1 800 g 载荷(176.4 N·mm)对驱动器进行循环疲劳试验,得到驱动器的疲劳试验中驱动器角度变化曲线如图16所示。在185次驱动循环中,驱动器角度变化范围较为稳定,驱动器的驱动行程保持在110°左右,且根据图16所示50次循环后驱动器的驱动行程变化极小,说明在装配好驱动器后再次进行训练可进一步去除SMA的塑性变形。

图15 调整后驱动器试验台

图16 驱动器疲劳试验
4 总结
非缠绕式轴向布置SMA丝的方案能够在有限的空间内布置更多的SMA丝,并减小SMA丝变形时的摩擦力,其缺点是SMA丝应变对应的驱动器旋转角度与缠绕式布置SMA丝的方案相比较小,输出行程有限。通过理论计算与试验验证,非缠绕式驱动器能够稳定提供110°左右的驱动行程,4组SMA丝能够提供196 N·mm的输出扭矩。根据本文的分析与试验,非缠绕式轴向布置SMA丝旋转驱动器的输出扭矩仍有较大的发掘潜力,使用更粗的SMA丝和使用更多组SMA丝均可显著提升驱动器的输出扭矩。驱动器的输出行程有限,增大变形区域外布置的SMA丝在SMA丝总长中的占比,可以一定程度地扩展驱动器的输出行程。为使驱动器设计方案更加具有实用性,下一步应该重点研究驱动器中SMA丝变形的控制问题与限位角度的设置对驱动器性能的影响。
猜你喜欢
客车技术与研究(2023年6期)2023-12-19
作文小学高年级(2022年3期)2022-04-20
中国煤层气(2021年5期)2021-03-02
电脑爱好者(2020年6期)2020-05-26
福建中学数学(2018年1期)2018-11-29
凿岩机械气动工具(2017年3期)2017-11-22
37°女人(2017年8期)2017-08-12
滇池(2017年7期)2017-07-18
光学精密工程(2016年5期)2016-11-07
华东理工大学学报(自然科学版)(2015年4期)2015-12-01