用于航天器耦合微振动分析的修正动质量法
2024-03-19 07:08:44柴江帅
振动与冲击 2024年5期
柴江帅,罗 青
(国防科技大学 空天科学学院,长沙 410073)
高精度空间任务对航天器平台在轨运行时力学环境的安静性能要求极高[1]。然而,航天器上存在众多微振动干扰源,如反作用飞轮、低温制冷压缩机、太阳翼驱动机构等[2]。其中,以反作用飞轮的微振动干扰最为显著[3-5]。微振动源所产生的振动干扰通过平台结构传递至相机等敏感载荷,严重降低其工作性能,成为制约高精度航天器发展的关键问题。因此,开展航天器微振动分析已成为研制高精度空间装备的关键环节。
微振动地面试验是分析和预测航天器平台在轨微振动环境的重要手段。通过在地面模拟航天器在轨运行时的力学环境,评估航天器在轨微振动特性,以便实施有效的振动抑制措施。现有针对微振动源干扰特性的测试方法中,一般是将微振动源固定安装在地面测试平台的传感器上,测试获取其扰动输出,并输入到已建立的航天器结构模型中,得到微振动对敏感载荷的动态影响[6]。然而,微振动源与支撑结构之间存在高度耦合。微振动源的扰动输出特性不仅取决于其内部的非理想特性,而且还受到其支撑结构动力耦合作用的影响。考虑到地面模拟条件与实际在轨飞行条件存在差异[7],有必要对微振动源与支撑结构的耦合动力学问题开展研究。
国外在航天器微振动方面的研究起步较早,针对微振动源与支撑结构的耦合动力学作用,已经历了“基本理论研究”、“静态动质量法”、“考虑陀螺效应的动态动质量法”3个阶段[8-13]。Elias等最早研究了微振动源与支撑结构耦合作用。通过 “基本理论研究”方法,即从微振动源与支撑结构的受力平衡关系出发,推导建立两者的耦合动力学方程,分析耦合作用对微振动源输出扰动的影响。该方法物理意义明确,是分析耦合扰动问题的基础。但对于自由度较多的复杂系统,其动力学建模及求解过程较为繁琐,且难以通过试验手段获取分析对象中的精确参数,无法与实际试验测量手段进行有效结合,因此,该方法实用程度有限。随后,Elias在耦合扰动分析方法中首次引入动质量的概念,为后续相关研究奠定了大体方向。Elias的研究中未考虑旋转机构陀螺效应的影响,属于静态动质量法。对于反作用飞轮而言,由于转子的陀螺效应,飞轮工作时的动质量会随转速变化,导致耦合扰动输出特性与静态时有较大差异。Zhang等[14-16]在静态动质量法的基础上,发展了考虑陀螺效应的动态动质量法,并通过理论建模与试验进行了验证。总体上,动质量法一直沿用至今,是目前最重要的源与支撑结构的耦合分析方法。张鹏飞等[17-18]提出了一种将动质量测试与理论建模相结合的扰动力测试结果修正方法,并设计了不同刚度的测试平台进行试验验证,该研究没有针对陀螺效应展开探讨。高行素等[19]以控制力矩陀螺为研究对象,采用动态动质量法研究了微振动源与柔性基础的耦合动力学问题,通过Simulink动力学仿真求得的扰动力在系统固有频率附近具有较高的准确性。除动质量法外,李雄飞等提出了利用频域子结构法分析动量轮在弹性边界的微振动响应,该方法具有较高的分析精度和计算效率,为研究源与弹性边界的耦合微振动问题提供了新思路。整体而言,当前针对微振动源与支撑结构动力学耦合问题的处理方法仍以动质量法为主,或者直接忽略两者之间的耦合关系进行分析[20]。然而,本文研究发现,以上处理方式仅在微振动源的质量远小于支撑结构的情况下能满足较高的分析精度要求,且在低频区域存在较大的局限性。
综上,本文以反作用飞轮为主要研究对象,研究微振动源与支撑结构之间的耦合动力学问题,对比分析传统动质量法的适用范围,提出依据机械阻抗理论分析动质量法的本质,并基于此研究考虑陀螺效应的修正动质量法(dynamic mass method,DMM)。
1 微振动源与支撑结构的动力学耦合问题
地面微振动测试一般是利用力传感器(如Kistler Table)直接测量微振动源对安装界面的扰动输出力和力矩,如图1所示[21-22]。图中所示系统,采用了低频空气弹簧将微振动源与传感器平台悬置,为输出扰动的测量提供类似于“在轨漂浮”的准自由边界条件,如图2(a)所示。
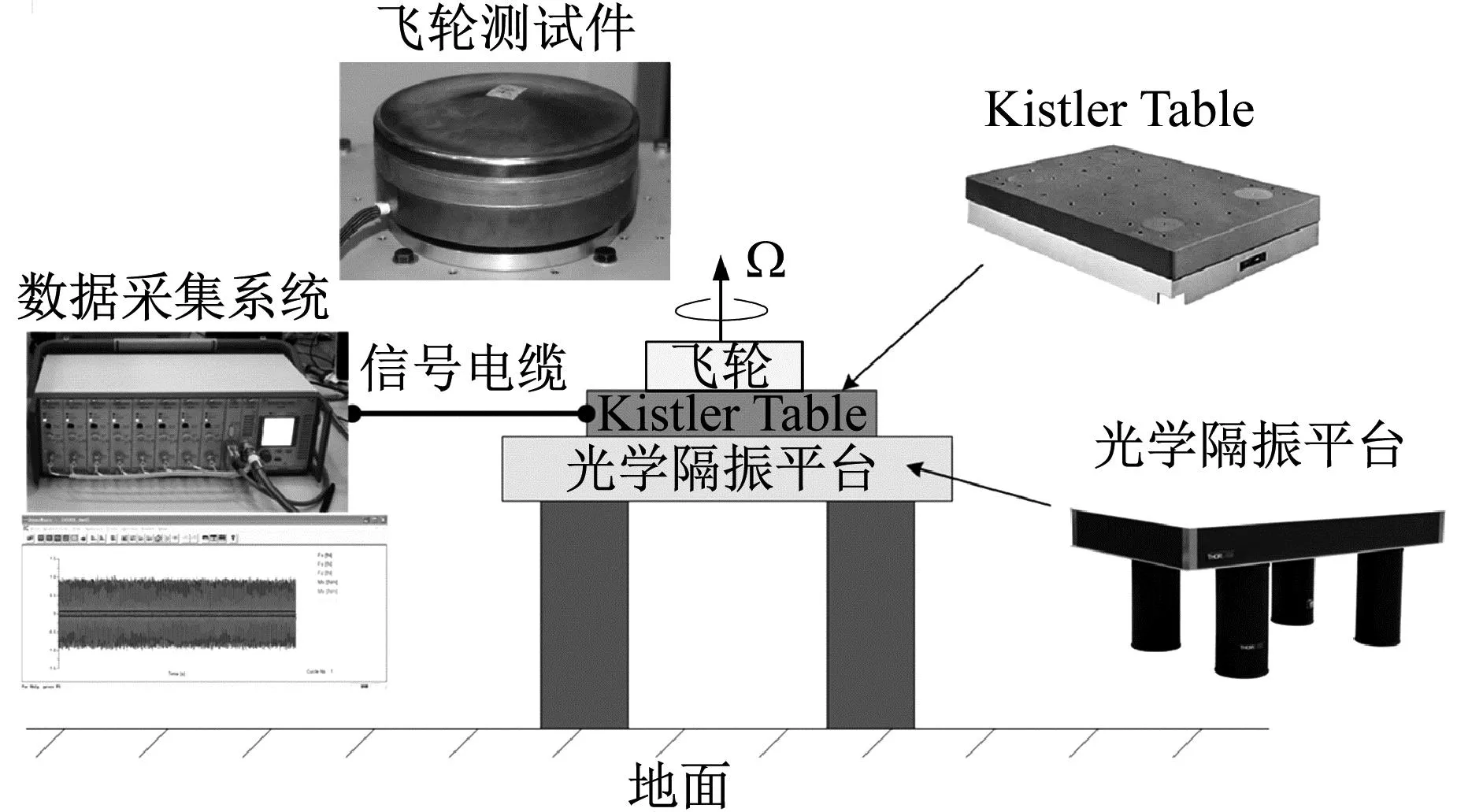
图1 反作用飞轮微振动地面测试系统
(a) 准自由边界
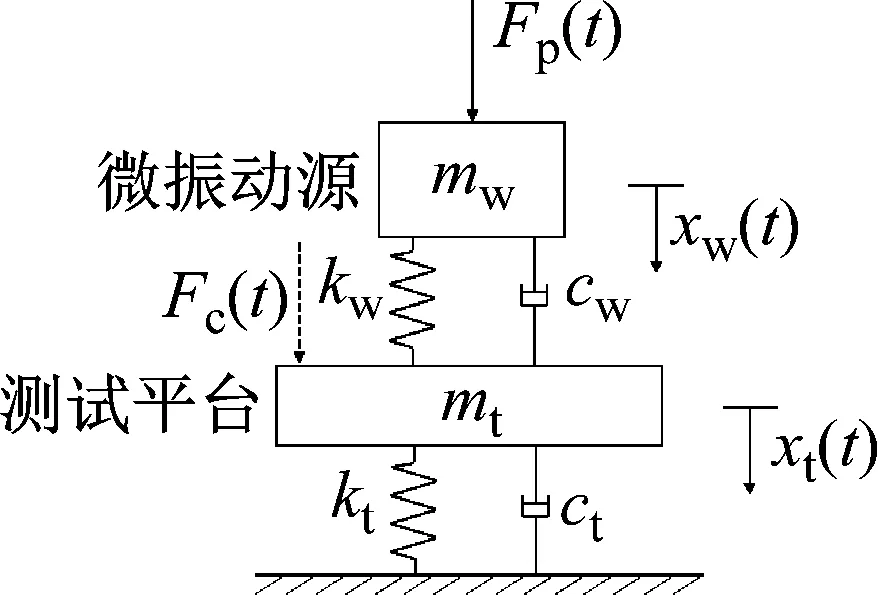
由于测试平台与航天器的动态特性存在差异,因此,通过上述地面试验测量得到的微振动源扰动数据,与实际在轨运行状态下微振动源的扰动输出存在差异。主要原因包括:一是在轨航天器处于“自由-自由”的刚体运动状态,而地面试验过程无法实现完全理想的自由刚体运动条件;二是航天器平台内部结构存在弹性振动,地面试验系统中测试平台的刚性往往远大于航天器的结构刚度,如图2所示。为解决该耦合问题,传统的动质量法以无耦合条件下的扰振输出为出发点,通过分析如图3所示固定边界条件下微振动源的输出作为耦合条件的输入扰动力,建立从固定边界到耦合边界的转换关系,从而为分析微振动源对支撑结构的影响提供输入接口。
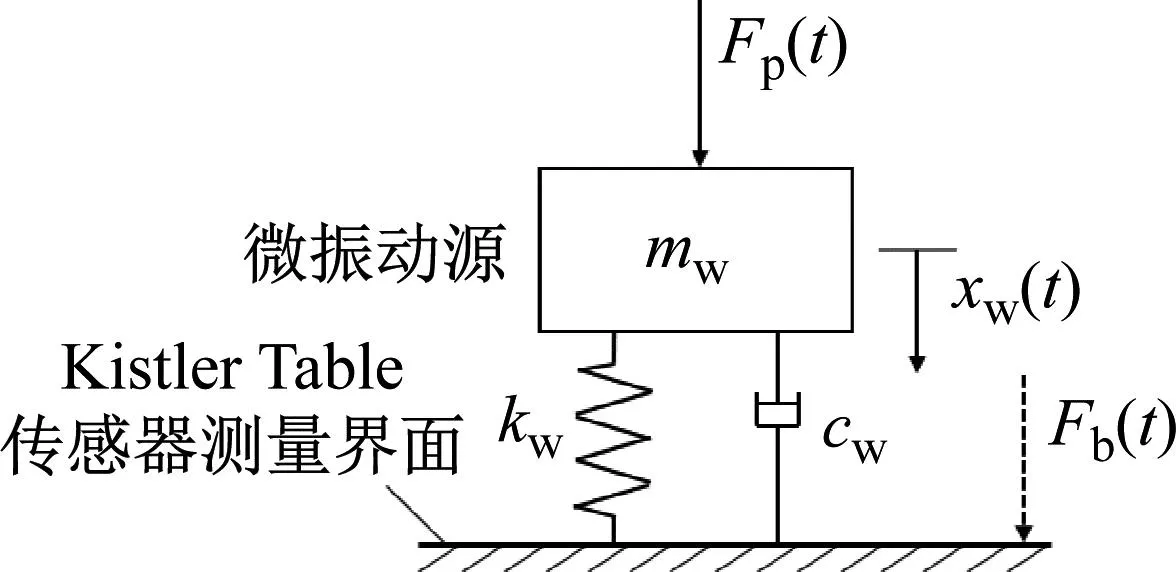
图3 微振动源固定边界分析模型示意
2 微振动源与支撑结构耦合建模与分析
以图2和图3所示模型为对象[23],分别通过受力平衡关系、传统动质量法和机械阻抗理论,推导从固定边界向耦合边界扰动输出的转换关系,分析微振动源与支撑结构的动力学耦合特性。推导过程中,不妨将上述转换关系定义为固-耦变换函数。
2.1 基于受力平衡的系统动力学模型
利用受力平衡关系推导建立的理论模型,可准确描述微振动源与支撑结构之间的相互耦合作用。
首先对图3所示固定边界模型进行受力分析,得到非耦合状态的动力学方程为
(1)
式中:mw、kw和cw分别为微振动源的质量、安装刚度和阻尼;xw为微振动源的质量与位移;Fp为微振动源内部因素产生的净扰动力。
此时,安装边界处的扰动为
(2)
对式进行拉氏变换,可得到固定边界条件下的力传递率为
(3)
同理,可以建立图2(a)所示准自由边界条件下系统的动力学方程为
(4)
式中:mt、kt和ct分别为测试平台的质量、支撑刚度与阻尼;xt为测试平台的位移。
相应地,准自由边界条件下的扰动输出为
(5)
对式(4)进行拉氏变换,可得到耦合条件下准自由边界的力传递率
(6)
其中
p(s)=mws2[mts2+(cw+ct)s+kw+kt]+
(cws+kw)(mts2+cts+kt)=
mwmts4+(mwcw+mwct+mtcw)s3+
(mwkw+mwkt+mtkw+cwct)s2+
(cwkt+ctkw)s+kwkt
(7)
联立式(3)和式(6),可得固定边界向准自由边界的扰动输出固-耦变换函数
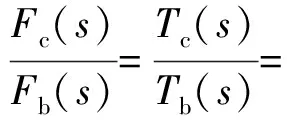
(8)
2.2 基于动质量法的微振动传递模型
采用传统的动质量法,建立微振动源与支撑结构之间的耦合动力学模型,如图4所示。
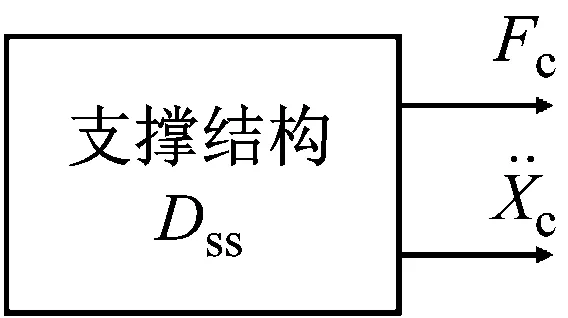
图4 微振动源与支撑结构动力学耦合关系
支撑结构一般为连续弹性体,进行离散后可建立多自由度系统的结构动力学方程为
(9)
式中:M、C和K分别为系统的质量矩阵、阻尼矩阵和刚度矩阵;x(t)为系统的广义位移;f(t)为系统所受的广义力。
对式(9)进行拉氏变换,得到频域内的动力学方程
(10)
式中,D(s)为动质量矩阵,即系统加速度向量与所受外载荷之间的传递函数矩阵,具体表达式为
D(s)=M+s-1C+s-2K
(11)

(12)
支撑结构的动力学方程为
(13)
联立式(12)和式(13),得到
(14)

同样以图3所示模型为例,可得到微振动源的动质量为
Dw=mw+s-1cw+s-2kw
(15)
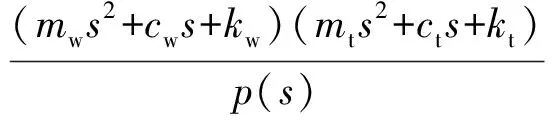
支撑结构的动质量为
Dss=mt+s-1ct+s-2kt
(16)
将式(15)和式(16)代入式(14),由此可以得到利用动质量法推导的固-耦变换函数为
(17)
2.3 基于机械阻抗理论的微振动传递模型
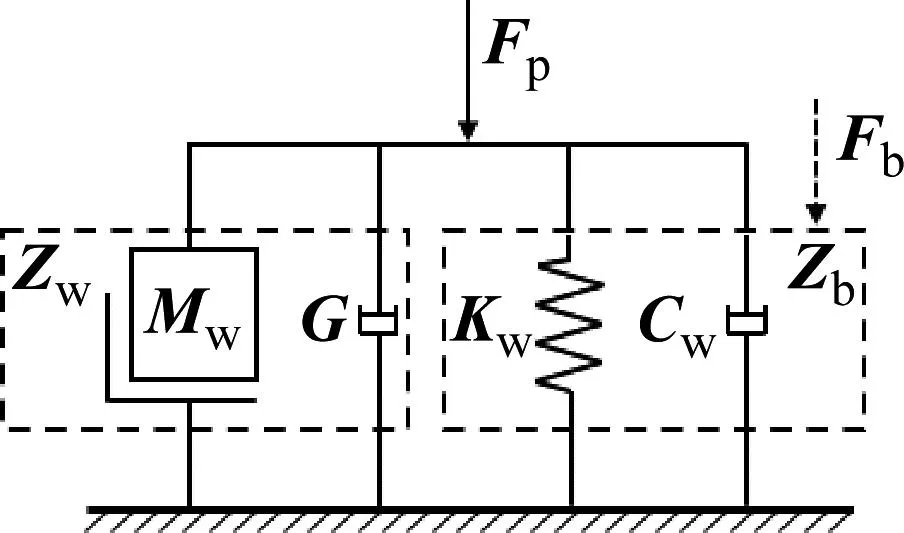
根据机械阻抗理论,由式(10)分析可知,动质量本质上是加速度阻抗。本文提出采用机械阻抗理论对微振动源的微振动传递过程进行建模,如图5所示。图中分别给出了固定边界和准自由边界条件对应的机械阻抗图[24]。
(a) 固定边界
根据机械阻抗的串并联计算规则,计算得到图5中各支路的加速度阻抗为
(18)
式中,Zw、Zb和Zc分别表示微振动源自身质量的加速度阻抗、固定边界输出扰动支路的加速度阻抗,以及准自由边界输出扰动支路的加速度阻抗。
对于固定边界,输出扰动对净扰动的分流为
(19)
对于准自由边界,输出扰动对净扰动的分流为
(20)
联立式(18)~式(20),得到利用机械阻抗方法推导的固-耦变换函数为

(21)
2.4 建模方法对比与分析
以上利用受力平衡关系、动质量法和机械阻抗法,分别推导建立了微振动源与支撑结构之间耦合微振动扰动的传递模型,如式(8)、式(17)和式(21)所示。对比可知,通过动质量法推导建立的固-耦变换函数与其余两种方法存在明显差异,即
(22)
分别利用上述三种方法,结合如表1给定的系统参数,计算图2(a)所示准自由边界下微振动源与支撑结构之间的耦合扰动力,结果如图6所示。由图中结果分析可知,在考察的全频段范围内,采用机械阻抗法分析的结果与根据受力平衡关系得到的耦合分析结果具有一致性。因为通过该两种方法得到的固-耦变换函数是相同的。然而,采用动质量法获取的耦合扰动力则存在较大差异。总体上,在较低频段,动质量法与其他两种方法获取的耦合扰动力差异较大,而在中高频段的差异则相对较小。
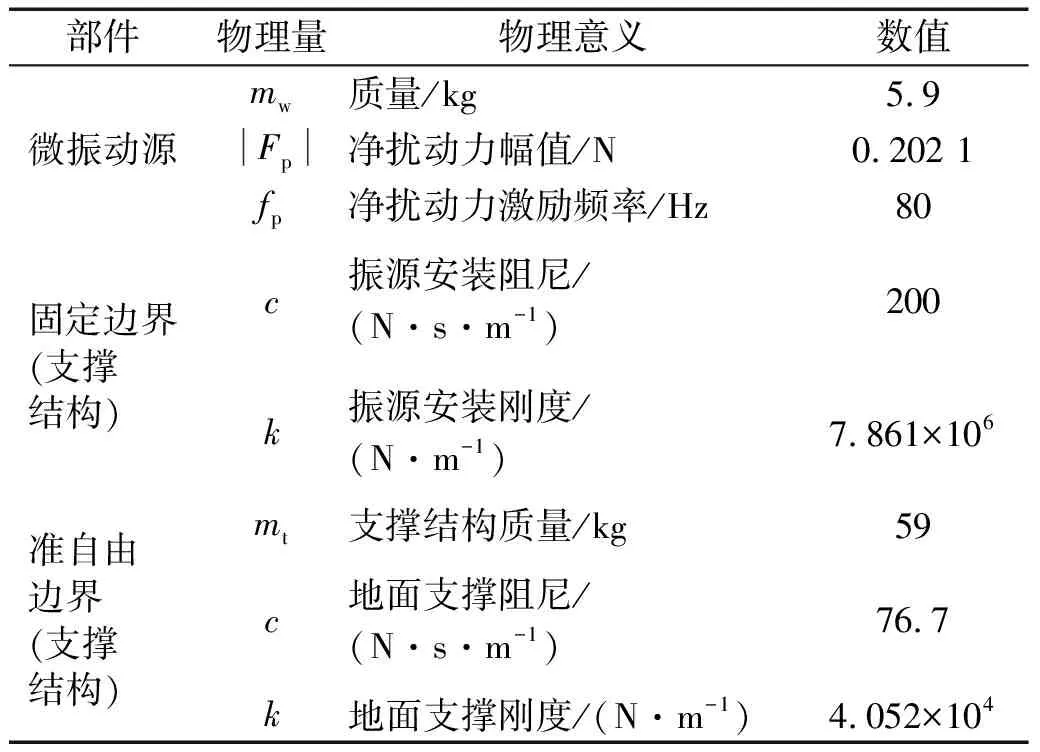
表1 微振动源与支撑结构简化模型仿真参数
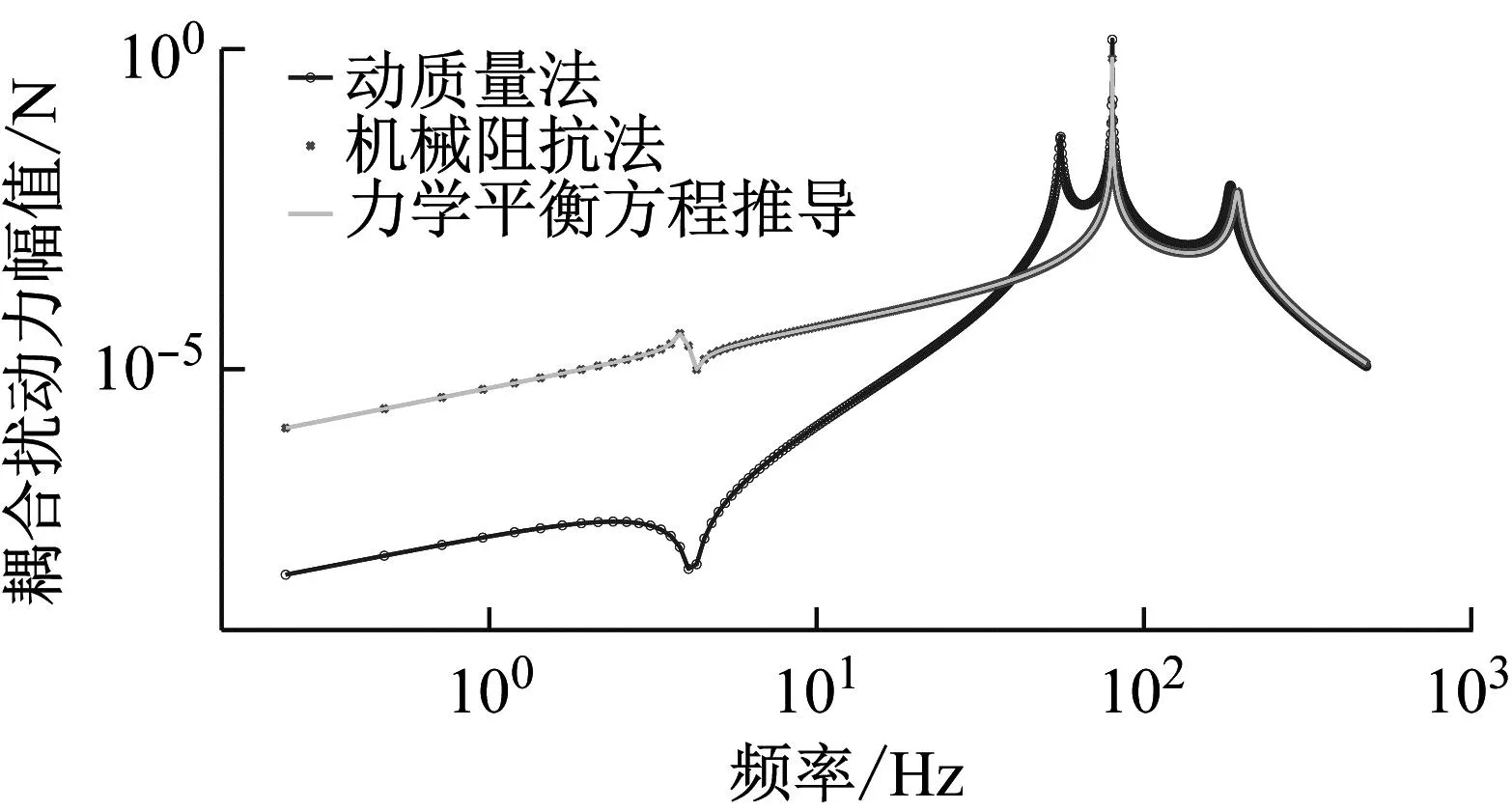
(a) mw/mt=0.1的计算结果
结果还分析了微振动源与支撑结构的相对质量关系,对采用不同耦合分析方法的影响。对比分析可知,当微振动源相对支撑结构的质量越小时,动质量法与其他两类方法的差异区间向低频移动,且在中高频段,分别通过三种方法获取的耦合分析结果趋于一致。
动质量法实际上是将微振动源的质量、阻尼和刚度合并成“动质量”,根据机械阻抗原理,其相应的机械阻抗图如图7所示。对比图5和图7可知,动质量法在对固定边界下的扰振载荷Fb向耦合边界进行转换时,将微振动源的质量、安装刚度和阻尼进行并联,合并为“动质量”来共同构成传递过程中净扰动力Fp的耗散支路阻抗,而将支撑结构单独构成耦合力Fc支路的阻抗。实际上,根据微振动源与支撑结构的耦合关系,对净扰动力Fp的实际分流过程应为:耦合力Fc支路的阻抗由微振动源的安装刚度、阻尼,以及支撑结构共同决定;传递过程中净扰动力Fp耗散支路的阻抗由微振动源的质量决定。而当微振动源的质量相对支撑结构非常小且可忽略时,净扰动力Fp耗散支路的阻抗为小量,此时,利用动质量法获得的耦合力与其他两种方法得到的结果趋于一致。以上即为采用动质量法进行耦合分析造成较大差异的主要原因。
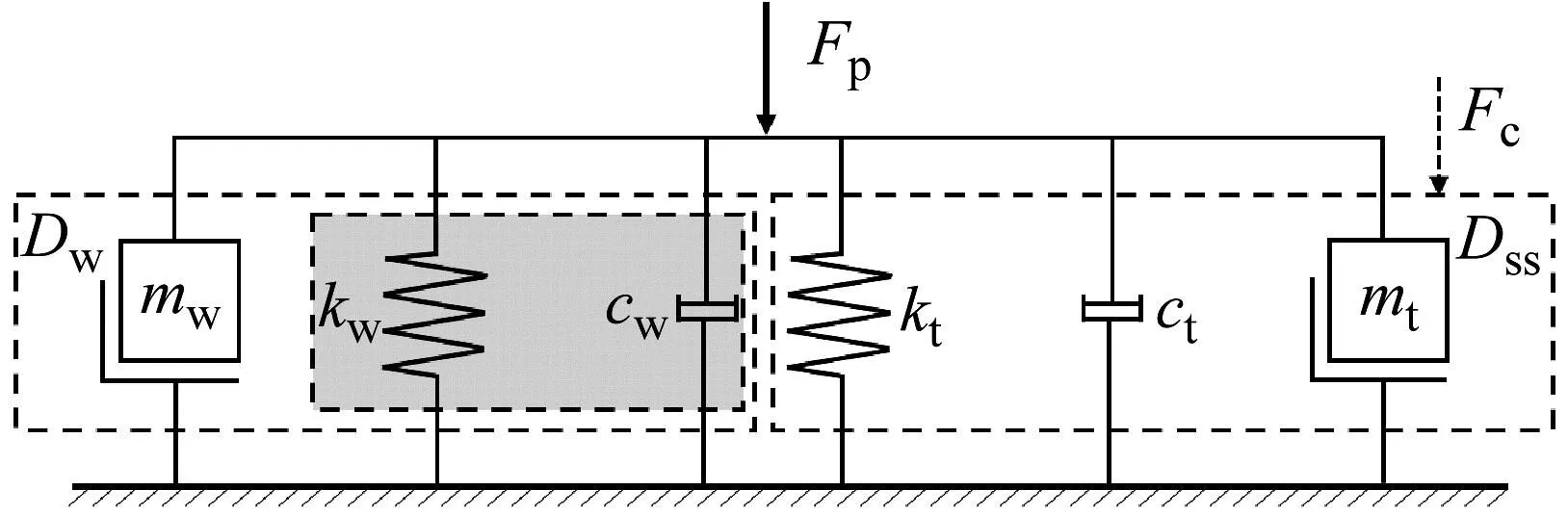
图7 动质量法的机械阻抗原理图
表2对比总结了三种耦合分析方法的特点。综合分析可知,动质量法适用于中高频段的微振动源与支撑结构耦合动力学分析,且当微振动源相对于支撑结构质量较小时,动质量法具有较高的分析精度。
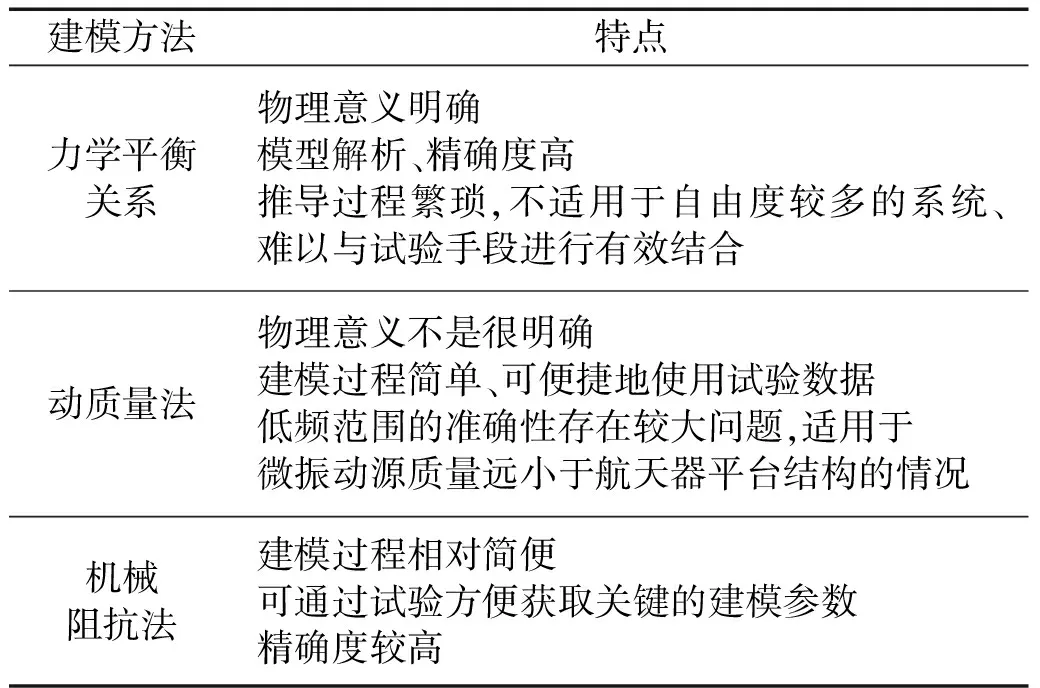
表2 三种微振动耦合分析方法对比
3 基于机械阻抗图的修正动质量法
3.1 修正方法
本文提出采用机械阻抗方法对传统的动质量法进行修正。将微振动源的安装刚度和阻尼特性并入支撑结构的加速度阻抗,研究微振动源自身的运动学特性(如陀螺效应等)与支撑结构的机械阻抗特性对净扰动力的分流效果,建立新的微振动源与支撑结构动力学耦合关系,如图8所示。
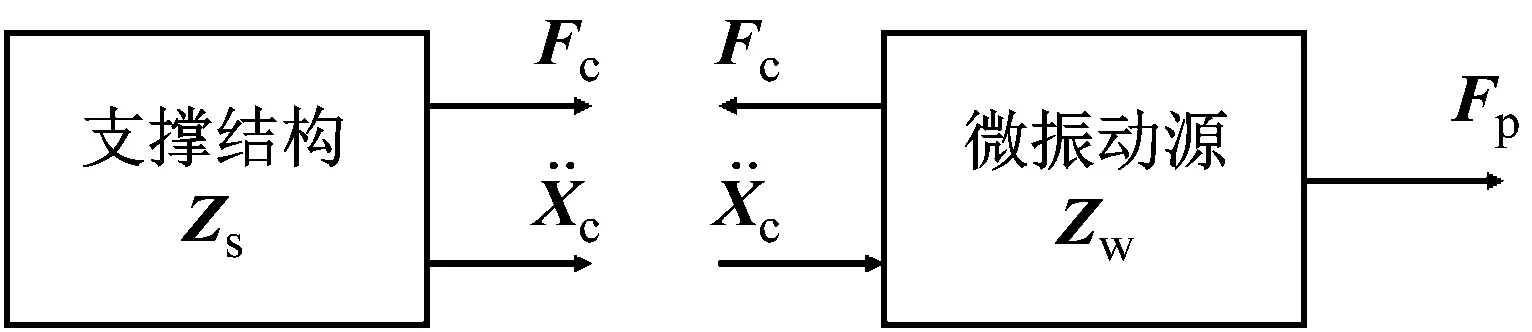
图8 基于机械阻抗的微振动源与支撑结构动力学耦合关系
根据机械阻抗理论,分别给出微振动源和支撑结构的动力学方程为
(23)
式中:Zs为支撑结构的加速度阻抗;Zw为微振动源的加速度阻抗。
由上式可得耦合力与净扰动力之间的关系
Fc(s)=Gpc(s)Fp(s)
(24)
式中,Gpc(s)为微振动源与支撑结构之间耦合力的传递矩阵,其具体表达式为
Gpc(s)={I+Zw(s)[Zs(s)]-1}-1
(25)
对于固定边界,将微振动源的安装刚度与阻尼并入支撑结构,由式(24)可得固定边界力为
Fb(s)=Gpb(s)Fp(s)
(26)
式中,Gpb(s)为净扰动力到微振动源固定边界力的传递矩阵,具体表达式为
Gpb(s)={I+Zw(s)[Zb(s)]-1}-1
(27)
式中,Zb为固定边界支撑结构(安装刚度、阻尼)的加速度阻抗。
联立式(24)~式(27),得到
Fc(s)=Gpc(s)Gpb(s)-1Fb(s)=Gbc(s)Fb(s)
(28)
式中,Gbc(s)为固-耦变换矩阵,具体表达式为
Gbc(s)={I+Zw(s)[Zs(s)]-1}-1{I+
Zw(s)[Zb(s)]-1}
(29)
3.2 反作用飞轮陀螺效应的处理
与其他类型的微振动源不同,反作用飞轮含有高速旋转的惯量部件,会因陀螺效应而与支撑结构发生动力学耦合,且耦合程度会随转速增加而增大。因此,针对反作用飞轮的微振动建模与分析必须考虑陀螺效应。
假设反作用飞轮的转速为Ω,忽略自转轴轴向的转动动力学。此时,对于图3所示的固定边界,系统的动力学方程为
(30)
式中,Mw、Kw和Cw分别为反作用飞轮的质量矩阵、安装刚度矩阵和安装阻尼矩阵,分别可表示为
Mw=diag(mw,mw,mw,Jr,Jr)
(31)
Kw=diag(kxw,kyw,kzw,kαw,kβw)
(32)
Cw=diag(cxw,cyw,czw,cαw,cβw)
(33)
陀螺矩阵G(Ω)可表示为
(34)
模型中,Fp(s)为飞轮内部非理想因素引起的净扰振激励力。该扰振激励主要以飞轮转子动、静不平衡扰动激励为主[25],忽略轴承缺陷及随机宽带噪声的影响,其时域模型可表示为
(35)
式中:U和φ分别为不平衡量及其初始相位;下标s和d分别表示静、动不平衡。
传统动态动质量法将陀螺矩阵视作加速度阻抗并入反作用飞轮的动质量矩阵,即
Dw=Mw+s-1(Cw+G)+s-2Kw
(36)
考虑到陀螺效应为飞轮转子自身的运动学特性,与支撑结构无关。因此,根据3.1节给出的修正动质量法,本文提出将陀螺效应进行如下处理,得到反作用飞轮加速度阻抗矩阵为
Zw=Mw+s-1G
(37)
于是得到考虑陀螺效应的多维耦合扰动力求解路径,如图9所示。具体的计算步骤如下:
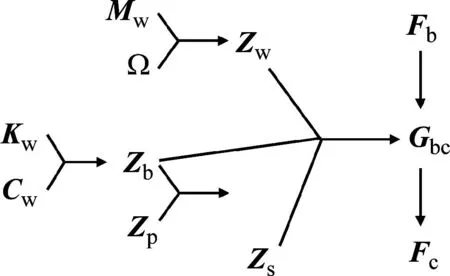
图9 考虑陀螺效应的多维耦合扰动力求解路径
步骤1计算反作用飞轮的阻抗Zw,由飞轮质量、惯量及转速信息得到;
步骤2计算固定边界的支撑阻抗Zb,由飞轮的安装刚度和阻尼求得;
步骤3计算耦合边界支撑结构的阻抗Zs,由Zb和飞轮安装边界处的阻抗Zp求得;
步骤4计算考虑陀螺效应的固-耦变换矩阵Gbc,由Zw、Zb和Zs求得;
步骤5计算多维耦合扰动力Fc,由Gbc和固定边界扰动输出Fb求得。
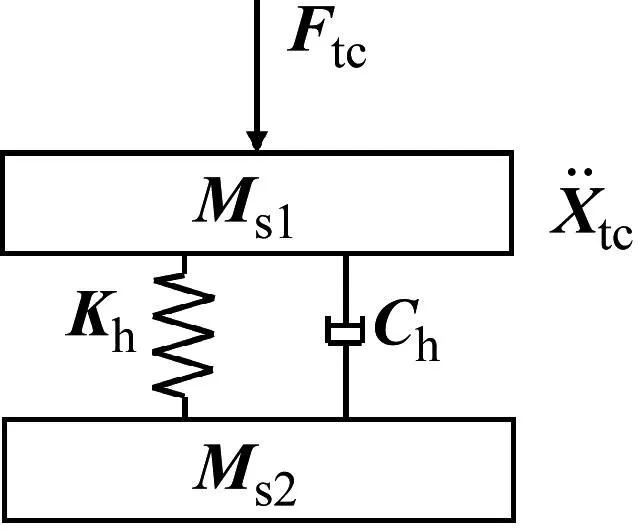
3.3 微振动对在轨航天器的影响

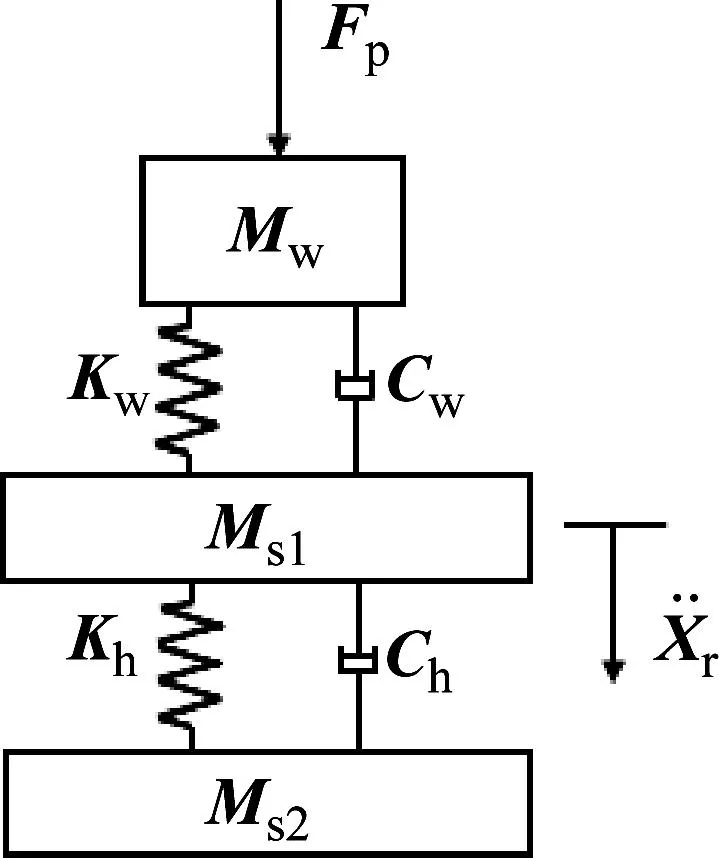
图10 反作用飞轮对航天器的微振动激励
(a) 传统动质量法耦合分析模型
依据所提出的修正动质量法,给出对应的机械阻抗图,如图12所示。
(a) 固定边界
忽略反作用飞轮的轴向转动动力学,以及航天器绕飞轮转轴的自由度,利用图12给出的阻抗关系,给出系统中各部分加速度阻抗为
(38)
式中,Ms1、Kh和Ch为航天器平台结构的质量矩阵、等效刚度矩阵和等效阻尼矩阵,分别表示为
Ms1=diag(ms1,ms1,ms1,Jxs1,Jys1)
(39)
Ch=diag(cxh,cyh,czh,cαh,cβh)
(40)
Kh=diag(kxh,kyh,kzh,kαh,kβh)
(41)
航天器附件结构的质量矩阵Ms2可表示为
Ms2=diag(ms2,ms2,ms2,Jxs2,Jys2)
(42)
将式(38)代入式(29),可得到将反作用飞轮在地面固定边界的扰动力测量值转换为在轨条件下耦合扰动输出的固-耦变换矩阵。
4 数值仿真分析
4.1 航天器结构参数
利用所建微振动耦合分析模型,结合表3所示的系统参数,分析反作用飞轮对航天器平台结构的微振动扰动响应。
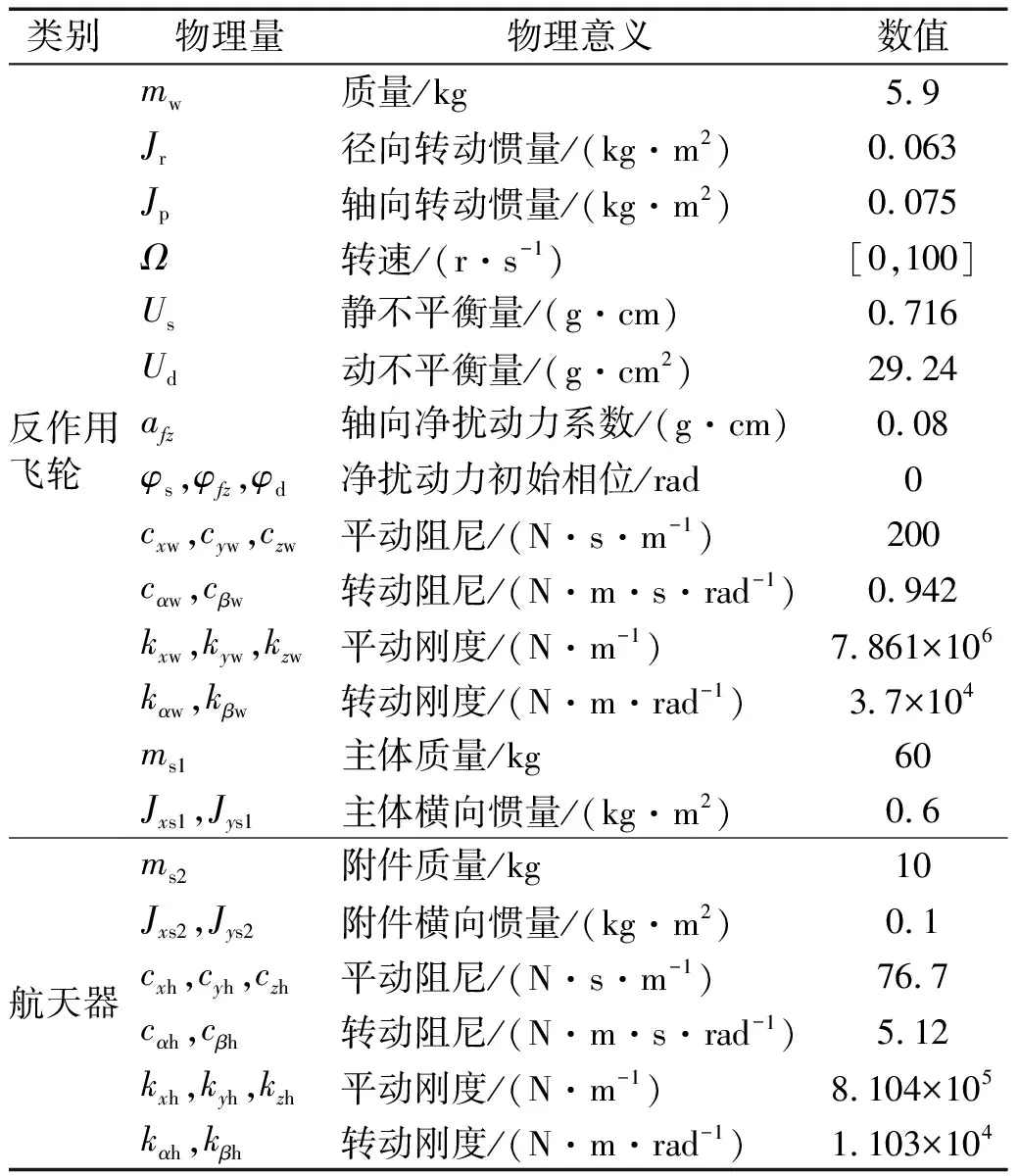
表3 反作用飞轮与航天器结构的模型参数
4.2 航天器微振动响应分析
当反作用飞轮的转速为4 800 r/min时,仿真得到航天器结构的微振动响应曲线如图13所示。
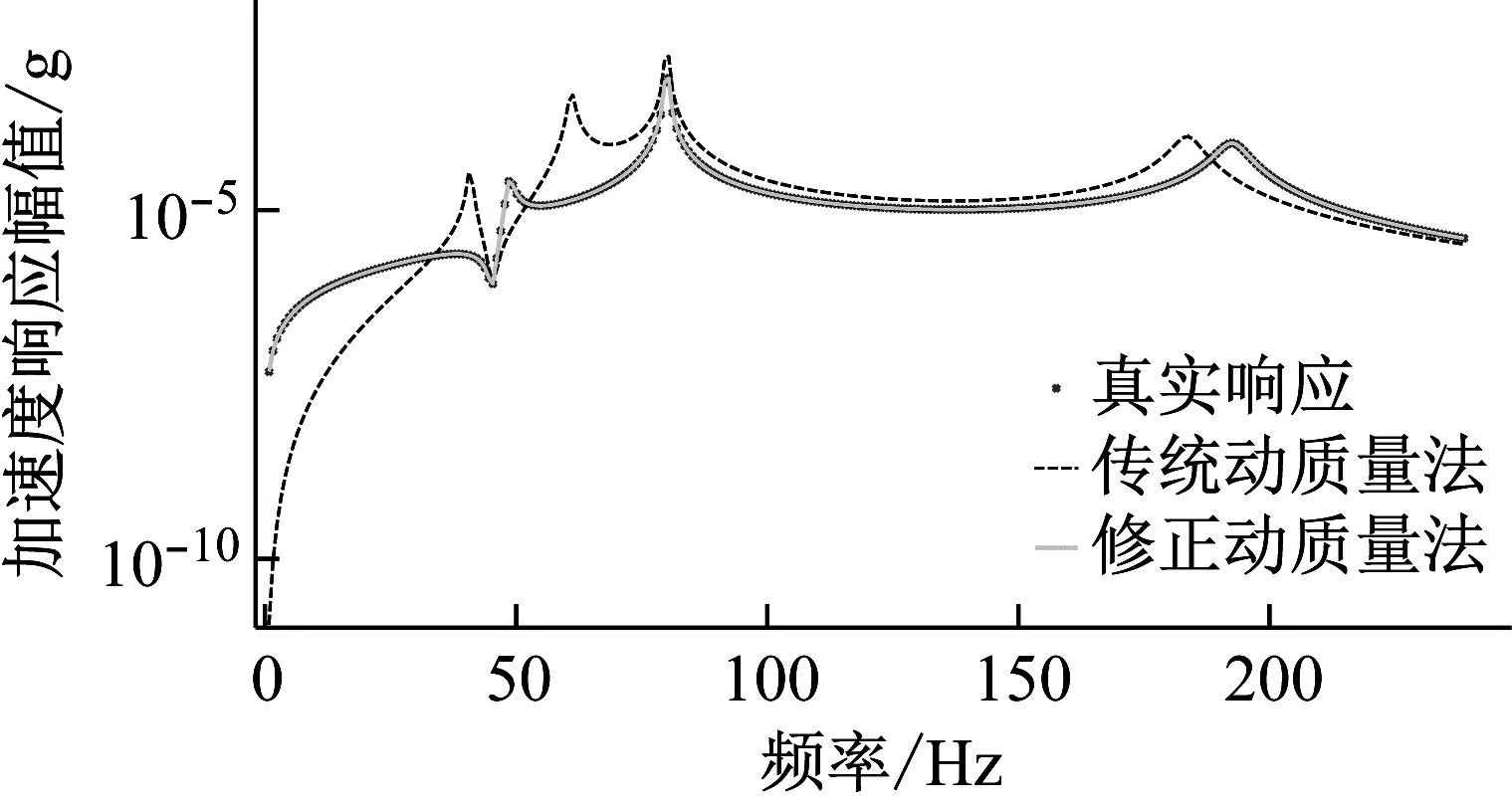
(a) 径向平动
对比平动和转动自由度的仿真结果发现,无扰动源状态下,以考虑陀螺效应的修正动质量法求得的耦合力为输入时,航天器平台结构的加速度响应曲线与有源状态的真实响应曲线完全重合;以传统动质量法求得的耦合力为输入时,与真实结果存在一定误差。以上仿真结果验证了修正动质量方法及其陀螺效应处理的正确性,在应用于实际工程的耦合扰动分析时相比传统动质量法具有更高的准确性。
4.3 陀螺效应的影响
由式(30)可看出,反作用飞轮高速转动时将产生陀螺效应,会对绕转子径向转动方向的运动特性产生影响。基于修正动质量法,图14对比了不同飞轮转速下,绕径向转动方向的反作用飞轮净扰动至耦合扰动的力传递关系。由图分析可知,当飞轮转动时,系统的共振区与飞轮静止时的共振区存在明显区别,且呈现出以静态共振区为中心,分别向高、低频范围发展的趋势。该趋势与文献[14-16]中试验测试结果给出的规律基本一致。该现象主要是由于飞轮陀螺效应会引起系统的正、逆涡动效应,随着飞轮转速增大,陀螺效应更加显著,对绕径向的动力学耦合传递特性的影响进一步增大,呈现出正涡动频率增大、逆涡动频率减小的规律。
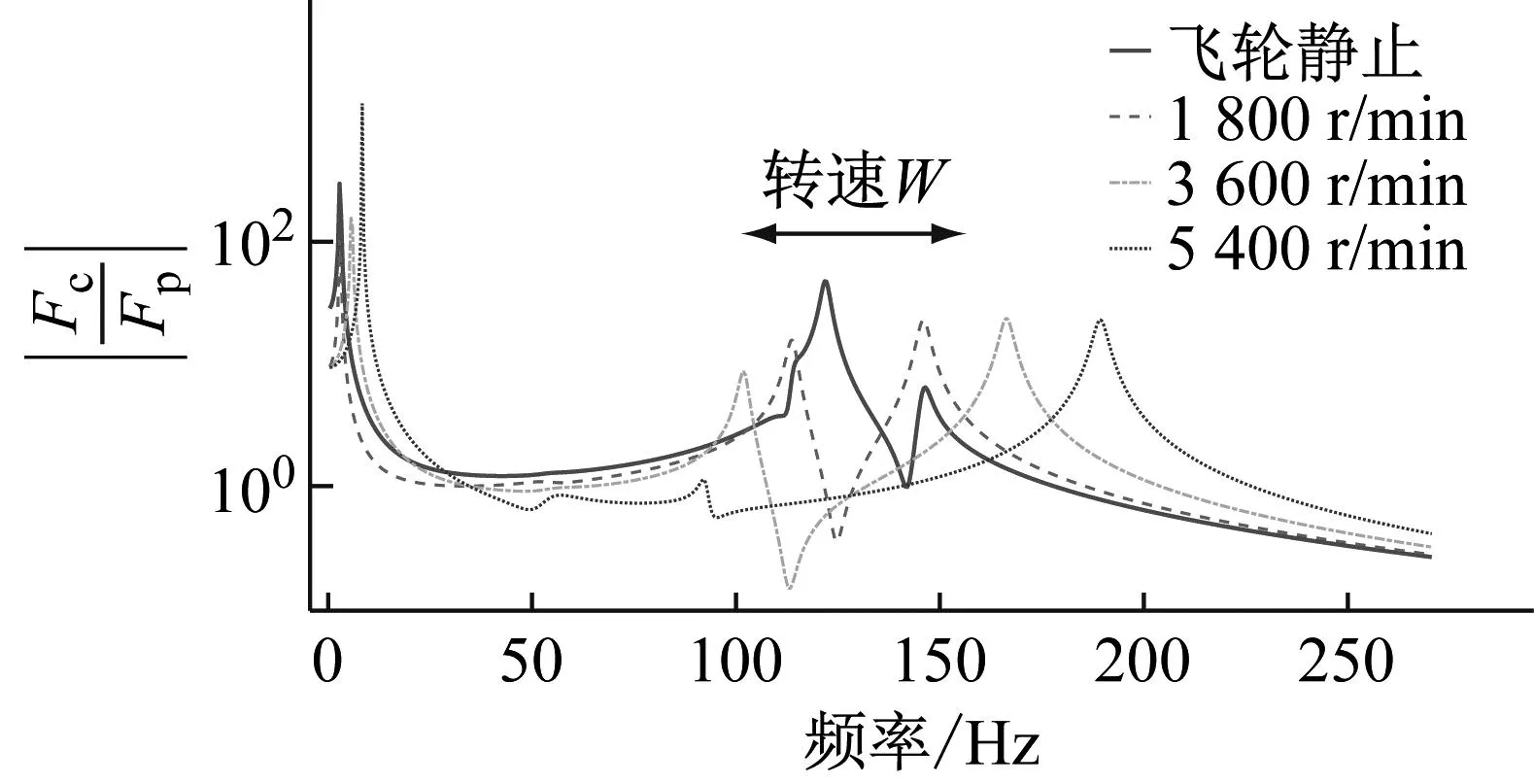
图14 不同转速下反作用飞轮对航天器的耦合扰动特性
5 结 论
本文主要研究了航天器及其微振动源的耦合动力学关系及理论分析方法。分别通过受力平衡关系、传统动质量法和机械阻抗方法建立了微振动源与支撑结构微振动耦合传递模型,并对比分析了三种方法的特点。从理论模型和仿真分析两方面讨论了采用传统动质量法进行耦合扰动力分析的适用范围,并依据机械阻抗理论,指出动质量实质上是将微振动源质量阻抗、刚度阻抗和阻尼阻抗进行并联,形成所谓的“动质量”,进而造成低频分析误差。在此基础上,提出了基于机械阻抗理论的修正动质量理论方法。依据该理论分析方法,建立了航天器与反作用飞轮的耦合动力学模型,重点给出了采用修正动质量法时对陀螺效应的处理方式。利用所建模型,仿真分析了反作用飞轮微振动对航天器平台结构动态影响,以及不同转速条件下陀螺效应对系统特性的影响规律。研究结果表明了修正动质量法在航天器微振动耦合动力学建模与分析方面的简便性和正确性。
猜你喜欢
国际太空(2022年7期)2022-08-16 09:52:50
国际太空(2019年9期)2019-10-23 01:55:34
小学生学习指导(低年级)(2019年10期)2019-10-16 08:12:34
模具制造(2019年7期)2019-09-25 07:30:00
学生天地(2019年6期)2019-03-07 01:10:46
国际太空(2018年12期)2019-01-28 12:53:20
军事文摘(2018年24期)2018-12-26 00:58:18
国际太空(2018年9期)2018-10-18 08:51:32
快乐语文(2018年36期)2018-03-12 00:56:02
中国自行车(2017年11期)2017-04-04 02:51:30