移动蜂窝网络定位技术综述*
2024-03-14 08:01郭晓娜姚志强
湘潭大学自然科学学报 2024年1期
许 伟,郭晓娜,陈 康,姚志强
(1. 湖南矩阵电子科技有限公司,湖南 长沙 410200;2.湘潭大学 智能可信导航与定位湖南省重点实验室 湖南 湘潭 411105;3.湘潭大学 自动化与电子信息学院,湖南 湘潭 411105)
0 引言
2030年,全国的时空信息服务市场预计达3万亿的规模.位置的精准描述和定位已成为社会各领域正常运行的基本需求,也是构建现代化产业体系和提升国民经济信息化服务水平的关键[1].常见的定位系统可以分为室内与室外两类.在室外,全球卫星导航系统(GNSS)、基站定位系统(BTS)、惯性导航系统等可以提供较高的定位精度和覆盖范围.在室内环境中,则可以选择视觉即时定位与地图构建(SLAM)、Wi-Fi、蓝牙、近场通信(NFC)、超宽带(UWB)、无线射频识别(RFID)等技术.随着移动通信技术的更新迭代,基站定位系统(BTS)有抗干扰能力强、无须部署基站的明显优势,吸引众多研究人员探索发现了大量未来移动网络应用场景,如:基础设施智能化的超能交通;超高带宽、超低时延和超可靠性等需求的人机物协同高精度智能工业;超高移动性、全覆盖的空中高速联网;极高吞吐量和极低时延需求的全息通信;全覆盖、超低功耗、超高精度的应急抢险等[2].
移动通信信号,特别是当前大规模商用的4G长期演进(LTE)和5G新无线电(NR),具备丰富性、几何多样性、高传输功率和大带宽等特点,可被用于提取时间和定位信息,是十分具有吸引力的导航定位候选信号之一.基于4G信号的蜂窝定位,受信号带宽、同步和网络部署等问题的影响,定位精度通常在十几米.随着5G的商用,以及高载波频率、大带宽、多天线和高精度同步技术的支撑,目前大量仿真测试与实际测量表明,基于5G信号的移动通信定位系统精度可达亚米级.移动通信定位已成为最近和正在进行的标准的组成部分,例如第三代合作伙伴计划(3GPP)和美国电气电子工程师学会(IEEE).位置精度要求也从监管机构规定的数十米增加到未来用例的分米级[3].
本文重点研究4G、5G主流定位技术演进过程,分析其性能、优缺点,总结了移动通信网络的定位方法.在4G中,讨论了基于信号强度、下行链路估计到达时间/到达时间差(TOA/TDOA)和LTE-MR的定位技术.在5G中,讨论了基于参考信号估计到达时间(TOA)、指纹匹配和波达方向(DOA)的定位技术.此外,还探讨移动通信定位面临的主要关键问题.最后展望了移动通信定位的发展新趋势.
1 3GPP协议中的定位需求
移动通信定位业务早在GSMR 98中已有定义,但真正具有实用价值的则是在3GPP R4中.3GPP定义的位置业务系统利用了原有移动网络资源,并根据需求对某些节点进行升级,以增添某些新功能,同时还引入了新的功能实体,如:GMLC、SMLC和LMU,以实现测量数据的计算,实现移动台的定位.随着移动通信技术的发展,3GPP已将增强型小区ID(E-Cell ID)、检测到达时间差(OTDOA)、辅助全球卫星导航系统(A-GNSS)定位技术写入LTE定位标准[4].在LTE R9中,针对正交频分复用(OFDM)系统设计了定位参考信号(PRS),用于下行链路无线帧配置,通过对PRS的处理进行信号时延估计[5].3GPP R16协议中定义了6种定位方案来达到米级甚至亚米级别精度.具体发展过程如表1所示:

表1 3GPP协议中定位需求发展
2 4G网络定位技术
2.1 基于信号强度的定位
接收信号强度指示(RSSI)定位方法原理如图1所示.RSSI是指接收机测量的实际信号强度,通常以分贝毫瓦(dBm)或毫瓦(mW)为单位进行测量.
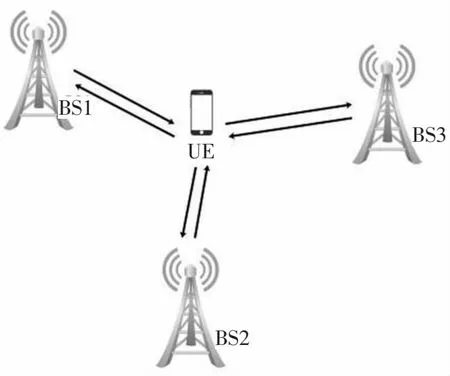
图1 RSSI 定位方法原理Fig.1 RSSI Positioning method principle
利用电磁波在空间中的衰落模型,建立信号强度观测量与距离之间的对应关系,进行定位解算.电磁波在空气中的传播损耗模型与其频率相关,一般认为满足如下模型:
(1)
式中:L为功率衰减值,单位dB;PRX为接收功率的数值,单位W;PTX为发射功率的数值,单位W;GRX为接收天线增益的数值,单位dB;GTX为发射天线增益的数值,单位dB;f为频率的数值,单位MHz;r为传播距离的数值,单位km.此方法优点在于结构简单、计算复杂度低,且不需要任何时间同步.但在现实情况中,电磁波环境极其复杂,传播过程受室内物品摆放、墙体遮挡以及人员走动等诸多因素影响,多径效应严重,定位效果不够理想.虽然可以配合滤波算法或迭代算法来提升精度,但如此又会增加计算复杂度,降低定位结果实时性.
在移动通信信号导航定位系统中,基于信号强度的定位技术主要有3种:1)近邻定位技术:通过用户携带的设备和已知发射机位置的远近程度联合估计用户位置;2)三边测量技术:使用从至少3个参考节点接收的RSSI估计用户设备与参考节点之间的绝对距离,然后从参考节点获取相对坐标;3)指纹匹配技术:收集样本位置的信号强度特征信息,建立信号离线地图,通过对待测点与样本点特征对比匹配实现位置估计.其中因深度学习方法蓬勃发展,基于信号强度的定位中,指纹匹配技术得到广泛应用.
软件定义无线电(SDR)可以不更换硬件,加载不同的软件定义通信协议接收不同类型的无线电信号,是目前移动通信信号导航定位系统接收平台的最佳选择.SDR提取RSSI信息时,通常采用非相干检测,利用快速傅里叶变换(FFT)将信号转换至频域处理,将所检测接收信号频域最高能量附近3 dB范围内的能量累加,从而得到RSSI,如图2所示:
(2)
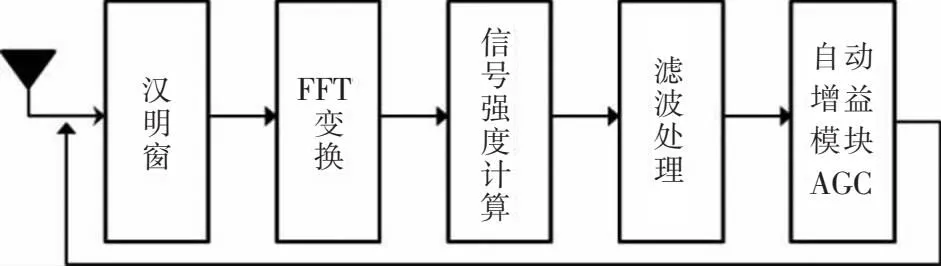
图2 接收信号强度RSSI获取Fig.2 Receive signal strength RSSI acquisition
采用滑动平滑滤波技术从阴影衰落中分离出快衰落和慢衰落,并在一定时间范围内对接收信号的幅值和包络求取区域平均值,自动增益模块(AGC)可降低噪声对信号功率的影响,这种反馈的方式可较好地分离噪声、补偿信号、稳定接收.
在室内环境中,接收机与基站之间的视距条件难以达成,并且由于多径衰落会出现严重的RSSI波动,导致定位精度极度下降.而在室外环境下,由于环境因素如电离层,也会引起RSSI测量一定的误差.因此,该方法适用于数米级短距离定位.此外,基于LTE信号RSSI的定位需要提前获取基站的相关信息,如地理坐标、发射功率等.韩国Shin等[6]在长隧道内利用LTE信号的RSSI测量构建指纹后确定用户位置,实际测量结果的均方根误差(RMSE)为30~40 m.
2.2 基于下行链路信号估计TOA/TDOA
在移动通信网中,TOA定位是指依靠测量基站端到用户(UE)端间信号传播时间换算成距离信息,将其作为三圆的半径,最终求得三圆的交点,交点即为终端位置.在二维平面上,至少需要3个基站作为发射端;在三维空间中,至少需要4个基站作为发射端.其原理如图3所示.时间提前量(TA)表征的是UE与天线端口之间的距离,根据3GPPTS 36.213中定义:1个采样周期(Ts=32.55 ns)对应的时间提前量(TA=16Ts=0.52 μs)距离为4.89 m.计算方法为:距离=传播速度(光速)×Ts/2(上下行路径和).eNode B测量到上行PRACH前导序列,在随机接入响应(RAR)的MACpayload中携带11 bit信息,TA的范围为0~1 282.根据RAR中的TA值,UE调整上行发射时间Nta=TA×16.如TA=1,那么Nta=1×16Ts,表征的距离为16×4.89 m=78.24 m,UE与网络的最大接入距离为:1 282×78.24 m≈100.304 km.所以定位精度要求不高时,UE到基站的距离可以近似认为是78×TA.

图3 TOA 定位方法原理Fig.3 TOA positioning method principle
实际上,在通信领域TOA的获得问题是一个时延估计问题,利用接收信号与接收机生成的序列做相关获得估计的时延,具体的时延估计过程基于对几个导频符号中的时间延迟估计和载波频率偏移估计的输出进行积分[7-8],以减少初始捕获偏移,TOA估计方法工作流程图如图4所示.

图4 TOA估计方法工作流程图Fig.4 Workflow diagram of TOA estimation method
在通信过程中,对接收信号利用傅里叶变换的时移特性,互相关算法描述为:
(3)
式中:N是帧长度;y(n)是接收信号;s(n)是接收机生成的序列;(·)*是共轭复数运算;(·)N是循环移位运算;#N是循环卷积运算符.
从频域角度将互相关算法描述为:
R(m)=IFFT{Y(k)S*(k)},
(4)
式中,Y(k)和S(k)分别是接收信号和训练序列傅里叶变换后的结果.时延的估计值为:
(5)
到达时间差(TDOA)定位如图5所示,在移动通信定位中,该方法是将两路信号到达时间之差代入双曲线方程求解,UE位置为多条双曲线的交点处.因此,确定一个待测点的位置至少需要接收4个基站的信号.TDOA定位相比于TOA定位的显著优势在于不要求UE端与各基站间保持精准的时钟同步.利用该方法提供位置信息的准确度主要取决于定时测量的精度与基站和UE间非视距(NLOS)误差的影响.
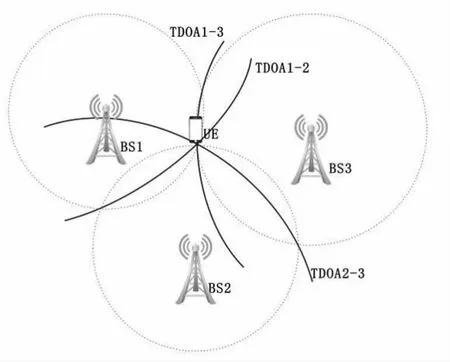
图5 TDOA 定位方法原理Fig.5 TDOA positioning method principle
TDOA有两种获取方式:1)对两基站到达待测目标的到达时间做差[9];2)直接获取两基站的相对时延.当两个信号源发射相同的信号或相同的序列内容,理想情况下接收机收到的信号应该只有幅度和时移的差别,同理,如果第i个和第j个移动通信信号源发送的都是x(t),而接收机接收到第i个和第j个信号源的信号分别为yi(t)和yj(t),那么
yj(t)=αyi(t+Δτi,j)+Δei,j,
(6)
式中:Δτi,j为时间差;Δei,j为两接收信号除幅值和波形以外的误差,则Δτi,j依然可以通过对yi(t)和yj(t)互相关得到.
Δτi,j=arg{yi(t) #yj(-t)}.
(7)
可用于测距的LTE下行链路信号有5种,分别是循环前缀(CP)和主同步信号(PSS)、辅同步信号(SSS)、小区参考信号(CRS)、PRS[10].在LTE系统中会传输CP以减少符号间的干扰(ISI).CP是将每个符号最后的Lcp个采样点复制到符号的开头.因此,可以估计时间和频率的偏移[11].LTE信号传输中,为保护用户隐私、减少带宽等,运营商可能不传输PRS,使用CRS估计TOA[12].在文献[13]中实验比较了SSS和CRS在具有多径的半城市环境中的测距精度,这表明CRS对多径更具鲁棒性.从基站传播到接收机的信号所遇到的多径信道可以用以下信道脉冲响应(CIR)和信道频率响应(CFR)来建模[14]:
(8)
式中:δ(·)表示狄拉克函数;hl是与第l条路径的复信道增益;τl是对应的延迟,其中l∈(0,L-1).符号定时误差是信道脉冲响应的第一个峰值发生的时移.图6表示从CRS中提取TOA的框图.
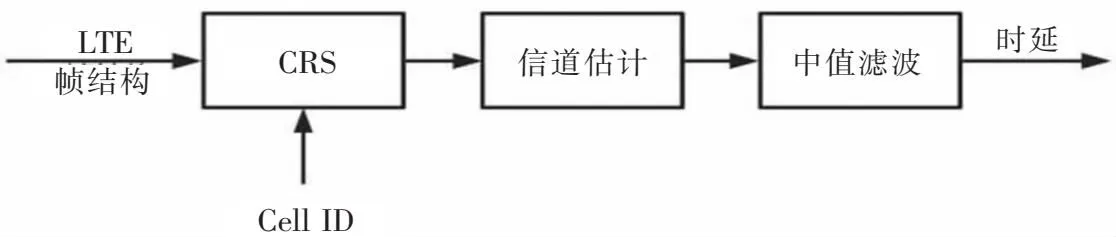
图6 从CRS中提取TOAFig.6 Extracting TOA from CRS
使用LTE信号进行TOA定位的主要挑战就是LTE基站与接收机是异步的,会存在一个初始时钟偏差,该时钟偏差的存在导致估计出异步TOA后不能用常规的定位算法直接进行定位,而要考虑对时钟偏差的处理.为了消除基站与接收机间未知的时钟偏差对定位的影响,一些文献会考虑使用同步的基站[15],但这是通过模拟LTE信号实现的.另一种方法便是使用GNSS信号获得已知距离测量值(作为真实距离),以后处理的方式就是估计并消除时钟偏差的影响.Driusso等[16]分析了OFDM信号的TOA估计性能,搭建LTE信号SDR接收平台,提取CRS估计TOA,验证了旋转因子不变法和卡尔曼滤波器的到达时间跟踪算法(EKAT)的抗多径性能,并应用于LTE的多径TOA提取,定位结果与全球定位系统(GPS)轨迹的均方根误差(RMSE)为31.09 m[17].Shamaei等[18]针对地面车辆和空中无人机等不同定位环境使用不同性能的SDR接收机,接收环境中的LTE信号,提取相应的TOA测距信息,并使用扩展卡尔曼(EKF)实现动态跟踪.该无人机的GPS导航方案与3个基站的LTE信号之间的RMSE为8.15 m.在地面车辆使用的恶劣多径环境下,GPS导航解决方案与6个基站的LTE信号之间的RMSE为5.80 m.
2.3 基于LTE-MR的定位
测量报告(MR)是移动设备上报给基站用于网络优化与评估的实时测量数据所生成的文件.其中,信号接收功率(RSRP)可反映网络覆盖和通话质量等情况,之后通过调整小区功率、增加载频和调整站址分布等方式得出相应的优化方案.另外,MR数据中包含了可以定位出位置坐标的网络参数,如:用户信号的到达时间、角度和强度等.
LTE用户向网络反馈的MR包含了海量数据信息,使数据驱动的定位方法得以实现.通过MR进行定位时,主要包含3个内容:特征提取、数据预处理、算法设计.特征提取时常选取服务小区与邻小区的物理小区识别码、参考信号接收功率、参考信号接收质量、终端经纬度等.为了提高定位精度和避免过拟合,数据预处理会剔除离群数据,同时将数据集合理分配为训练集与测试集.在算法设计的过程中用机器学习的方法进行MR位置信息重构,本质上是一个预测数值型问题.在提取数据特征后利用常用机器学习算法(AdaBoost算法、KNN算法、XGBoost算法、Bagging算法等)进行实验测试,误差对比如表2所示[19].

表2 常用机器学习算法误差对比
同济大学提出的电信位置恢复框架(TLOC)是第一个证明迁移学习在电信户外位置恢复中的有效性框架[20].在上海的2G GSM和4G LTE-MR数据集上,TLOC比非转移方法的中值误差分别少27.58%和26.12%,比N型埋层(NBL)新的指纹方法的中值误差少47.77%和49.22%,其平均误差达到40 m左右.
3 5G网络定位技术
3.1 基于参考信号估计TOA
5G NR中引入了4个主要参考信号:解调参考信号(DMRS)、相位跟踪参考信号(PTRS)、探测参考信号(SRS)和信道状态信息参考信号(CSI-RS).这些参考信号只有在必要之时才被发送,所以通过5G信号进行导航定位的方法大部分会利用同步广播块(SSB).SSB由主同步信号(PSS)、辅同步信号(SSS)、PBCH三部分共同组成,在时域上由4个连续OFDM符号组成,编号为0、1、2、3.
Shamaei等[21]从5G下行信道中的SS/PBCH提取测距信息估计TOA.首先,接收机在所有可能的频率上进行搜索,以便找到任何可用的SS/PBCH块.一旦确定了SS/PBCH块的中心频率,就开始进行采样.接下来,通过PSS和SSS过程获取小区ID.小区ID映射分配给DM-RS的子载波.当检测到DM-RS序列后,就可以使用它来估计信道频率响应(CFR).接下来就可以解码PBCH消息.解码完成后,用SS/PBCH块的第2个或第4个符号来估计CFR和细化帧开始时间,由此得到TOA估计值.实测结果表明,使用SS/PBCH信号的估计伪距在去除时钟偏差后的标准偏差为1.19 m.文献[22]同样通过利用5G下行信道中的SSB,提出了一种基于载波相位的5G NR信号TOA估计算法用于室内定位,主要包括粗同步、多径捕获、延迟跟踪和基于载波相位的TOA测距估计4个步骤.首先通过检测PSS和SSS来初步估计SSB帧的开始,提取DM-RS.然后通过LS-MP方法迭代地获取多径的时延从而获取更精确的时间估计.使用延迟锁相环以跟踪第一路径的到达时间.再根据载波相位测量获得TOA估计.测试结果表明,在静态场景中,TOA精度约为0.5 m,在行人移动场景,精度约为0.8 m.
3.2 基于DOA的定位
基于到达角度(DOA)算法是当基站与待测点的位置处于同一水平面时,通过测量待测点发射信号到达定位基站的方位角,再根据两条射线交点可以估计出待测点的真实位置.DOA定位方法原理如图7所示.该方法的优势在于不涉及时间同步问题,同时两个及以上的基站就能实现定位.
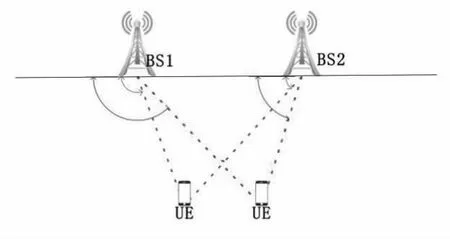
图7 DOA 定位方法原理Fig.7 DOA Positioning method principle
在第五代移动通信技术中,通过在发射器和接收器上使用多个天线,MIMO技术可以有效地利用空间复用技术来提高通信质量并增加系统传输容量.随着天线数量的增加,它可以提供更好的分集增益,从而增强传输链路的可靠性并提高传输速率.随着MIMO技术在5G系统中的使用,基于天线阵列的DOA方法具有了更多优势.
文献[23]提出一种基于正交匹配追踪(OMP)的相邻角功率差(AAPD)方法.首先使用OMP得到DOA方向的粗略估计,然后通过计算初始值点处相邻点的功率差来对估计进行调整,得到高精度的DOA估计.在连续运动的场景中,进一步应用波束成形,从而减少了计算量.仿真和实验结果表明,所提方法能够实现高精度估计,消除误差抖动.与传统的多信号分类(MUSIC)DOA估计方法相比,精度提高了46%.在多径室内环境中,静态角度测量的平均误差在2°以内,实际运动测试中测量误差不超过5°的概率为97.5%.
3.3 基于指纹匹配的定位
指纹匹配定位方法,即基于信号指纹的定位方法,原理如图8所示.此方法不需要解算,其基本思想在于:离线定位阶段,事先标定待测区域的标记点并采集该点处的环境指纹信息,建立离线指纹库;在线定位阶段,通过实时获取待测点的环境信息并与离线指纹库中的数据项进行匹配,得到待测点的位置.
图8 指纹定位方法原理Fig.8 Fingerprint positioning method principle
人们可以选择RSSI、信道状态信息(CSI)或其他物理量作为指纹[24].在无线通信网络环境中,同一个待测定位点往往会收到多个基站(已知节点)发出的信号.并且,这些信号的RSSI或CSI受传输距离、传播路径以及遮挡物等因素影响,结果也不尽相同;将不同的特征组合在一起,即具备了区分各个不同待测定位点的能力.由于CSI可以展示出各个信道背后的相位响应和振幅响应,CSI指纹可以获得比RSSI更好的时间分辨率、频率分辨率和稳定性[25].
此方法优点在于不需要信号解算,可以通过更密集地布置指纹采集点来提升定位的分辨精度、不受NLOS误差影响.缺点是离线采集指纹阶段,时间和人力成本较高,环境、物品、人员等因素的变化都会对信号采集、匹配造成干扰,不适用于动态环境和人员密集场所.
文献[26]从商用5GNR的下行物理广播信道(PBCH)中的DMRS中提取CSI,开发出一种名为Hi-Loc的混合室内定位系统.通过引入卷积神经网络(CNN)和双向长短期记忆(BiLSTM)的双注意力机制深度网络,分别设计基于特征的注意力机制和基于样本的注意力机制,提取CSI的隐式空间和时间信息.于在线阶段,通过应用全连接神经网络(FCNN),根据相应的CSI特征估计二维坐标.在典型的办公室和走廊场景中进行室内现场测试.结果表明,Hi-Loc在办公场景和走廊场景的内部测试用例中分别实现了2.0 m和65.1 m的平均绝对误差,在办公场景和走廊场景的外部测试用例中分别实现了0.31 m和93.3 m的平均绝对误差.
文献[27]针对传统指纹库构建和匹配算法成本高的问题,提出了一种基于矩阵填充的5G超密网络指纹定位方法(MC-FPL),首先,建立部分指纹数据库,通过加速邻近梯度算法对指纹数据库进行填充,从而建立完整的指纹数据库.然后,通过一种基于最强接收信号强度的指纹库划分方法,将指纹库划分为若干个子指纹库.最后,使用分类加权K近邻指纹匹配算法.通过对子指纹数据库进行匹配从而估计待定位点的坐标.仿真结果表明,与传统指纹算法相比,MC-FPL算法降低了建库和指纹匹配的复杂度,具有更高的定位精度.
4 移动通信定位技术主要关键问题
卫星导航在城市峡谷、室内、地下等环境中难以提供高精度且可靠的导航定位,而移动通信信号广泛存在于用户活动环境中,可提取与定位相关的信号参数,而上节所利用的移动通信信号并非为导航定位设计.以4G和5G为例,虽然PRS信号在3GPP R8与R16标准中就作为一种用于定位和同步的特殊参考信号被引入,但由于许多原因,并没有被商用.其中最主要的两个原因在于:1)需要额外带宽来容纳PRS,大约占1%~4%的带宽,这导致大多数运营商选择不发射PRS从而将更多带宽用于其他业务;2)这种基于网络的定位会侵犯用户的隐私.因此,想要利用移动通信进行高精度定位存在诸多问题需要去解决.
4.1 时钟同步
信号导航定位系统中,接收机接收的信号来自不同的无线系统,系统与系统之间存在时钟同步问题.此外,同一通信系统中,因移动通信信号并非为导航定位而设计,基站存在未知的时钟偏置和漂移,绝大多数通信系统内并没有同步到纳秒级.对导航定位来说,参与解算的信号源时钟同步至关重要,因此,解决移动通信信号源的时钟同步问题对移动通信信号导航定位系统来说是必不可少的一项工作.
目前的基站时间同步技术主要有两类:基于GNSS的授时和基于IEEE 1588的精密时间协议(PTP)同步.基于GNSS的授时技术通过GNSS信号实现接收机的高精度定时,其接收机定时精度在百纳秒量级;基于IEEE 1588的精确时间协议技术将主参考时钟通过1588光纤网络实现高精度的时间传递,通过有限跳数保持站点间时间同步,其每跳的时间同步精度损失在3~5 ns[28].但若要实现基于基站的高精度定位,目前的时间同步技术以及设备还存在较大的提升空间,无法满足导航定位需求.例如在TOA/TDOA等方法中,需要将到达时间的测量值转换为距离,这样的测量值需要发射机与接收机内部时钟的紧密同步.无线电信号在真空中以接近光速c传播,c=299 792 458 m/s.1 ns的时间误差就转化成了30 cm的距离误差.因此,要实现亚米级别的定位精度,至少需要3 ns量级的时间同步精度.
文献[29]提出从OFDM信号的到达时间提取出伪距的公式,其中时钟偏差就是求解伪距重要的部分.
(9)

文献[30]发现虽然基站时钟与GPS之间没有完全同步,但是它们的时钟之间相对稳定.蜂窝基站收发器站(BTS)时钟之间有一定的“松散”同步,蜂窝基站的拍频稳定性接近原子标准.时钟偏差可以实现为一个稳定的自回归移动平均模型.以此实现无人机定位米到亚米级别的定位精度.
文献[31]发现即使是同一小区的不同扇区,由于扇形天线的相位中心之间的未知距离,射频连接器导致的延迟,以及布线、滤波器、放大器等其他因素也会导致时钟偏差有些许不同.
文献[32]分析了蜂窝网络中用户设备的基于TOA的定位,考虑了用户设备时钟偏差统计的先验知识的3种不同情况.针对3种情况评估了4G和5G网络中UE定位的平方位置误差界(SPEB):1)UE偏置统计是已知的并且仅估计UE位置;2)UE偏置统计是未知的并且UE联合地估计其位置和时钟偏置;3)UE时钟偏置统计是未知的并且仅估计UE位置.
4.2 源关联
在大规模MIMO系统中,一个基站可以同时接受多个信号,服务多个终端,这些信号通常来自相干分布源或非相干分布源.通常可以使用各种到达角度(AOA)估计算法去估计信号参数.但是,这种终端位置估计是根据与每个终端相关的参数去估计的.因此源关联是大规模MIMO系统中多源定位的关键问题[33].文献[34]针对多径环境下的源关联(SA)、DOA和衰落系数(FCs)的估计提出的有效方法,基于多组相干下多径信号模型的秩降低特性信号.利用多路径结构的信息,可以估计任意几何形状的阵列,与传统方法相比,可以显著提高性能.
文献[35]研究了复杂多径传播环境下的源定位和关联问题,提出一种基于半酉稀疏约束和子空间技术的最小均方估计(MMSE)框架迭代实现的广义JSLA算法,可估计空间路径中各自的DOA.与不考虑多路径信道信息的方案相比,该方法进一步提高了源定位精度.
文献[36]提出了一种基于迭代优化、半酉约束和特征分解技术的目标定位与关联方法.该方法无须事先了解传播环境,直接定位空间源,并将入射路径关联到每个源.在多径传播场景下可以实现相当不错的源关联和定位性能,且不需要任何与环境相关的先验信息.
4.3 实时定位
目前有关定位的研究往往侧重于通过开发各种算法例如卡尔曼滤波器及其改进来提高定位精度.但是定位的实时性能研究同样也是不可或缺的一部分.目前采集LTE或者5G信号大多使用通用软件无线电外设(USRP)进行,数据采集后在电脑上进行离线处理.以移动蜂窝网络定位技术在无人机上的应用举例,定位误差与延迟和无人机速度成正比,无人机速度越快,定位误差就越大.因此需要考虑如何在现场可编程门阵列(FPGA)等硬件中实现基于SDR的定位收发器,并且整个系统中软件和硬件部分所引入的延迟都需要纳入考量.
4.4 室内外越区切换
卫星导航定位系统在空旷环境下定位精度较高,而移动通信信号导航定位系统主要用于弥补GNSS的不足,在GNSS失效时使用,从而实现不分时间、不分地点的高精度定位.然而在复杂环境的交汇处,存在乒乓效应,导致接收机功耗变大、定位系统稳定性差.因此,研究和关注信号切换存在的问题,是提高移动通信信号导航定位系统稳定性、实现高精度无缝定位的一个关键因素.对于单环境,室内或室外,已经有许多定位技术可以针对该环境实现不同精度的定位,然而当室内外环境切换时,会产生定位误差.对于室内/室外无缝切换的定位,要求在室内室外环境的运动过程中,能根据室内外环境不同的特征,选择最佳的定位技术来保证定位的精度.同时在进行室内外定位技术切换时要满足定位过程的无缝切换、平滑稳定.能够实现室内室外以及室内外中间区域全覆盖的高精度定位.
4.5 基站位置准确度
基站的位置也是定位中的重要部分之一,大部分定位算法都需要已知基站的经纬度.同时,定位服务中使用的基站越多,就可以提供更多的位置信息,定位的准确度也会提高.在实验中,若无法直接从运营商处获取基站GPS位置,就需要通过人工测量获得基站的GPS位置.而基站宏站天线布设通常是多个运营商多个天线布设在同一楼顶,人工难以获取精准的位置,通常取基站的位置为多天线的中心点或者楼的中心点,这也是误差来源之一.目前GPS定位模块定位精度在1~3 m之间.如果使用实时动态(RTK)定位模块,精度则可以提升到20 cm之内.
5 6G网络定位技术展望
2019年11月,中国科技部正式启动了6G研究,并成立了IMT-2030(6G)推进组,以推动6G技术研究.目前,面向2030年商用的6G仍处于愿景需求研究及概念形成阶段,6G技术方向及方案仍在探索中.但已经有许多有关6G的愿景被提出[37].
目前,许多标准化组织针对6G的一些潜在技术开展了标准化工作.
在太赫兹频段方面,IEEE 802.15.3d标准发布了300 GHz的太赫兹频段[38].中国航天科工二院25所在北京完成国内首次太赫兹轨道角动量的实时无线传输通信实验,利用高精度螺旋相位板天线在110 GHz频段实现4种不同波束模态,通过4模态合成在10 GHz的传输带宽上完成100 Gbit/s的无线实时传输.太赫兹频谱保证6G定位精度在室外场景下能够达到1 m以下,在室内场景下达到10 cm以下.同时6G能够实现三维全空间覆盖,以每秒太比特(Tbit/s)的数据速率和亚毫秒(sub-ms)的时延提供智能泛在的无线连接[39].
在语义通信方面,IMT-2030 6G推进组已开展语义通信相关的技术规范化和标准化工作.2021年以来,IMT-2030 6G推进组在已发布的系列白皮书中均将语义通信和语义认知网络定义为6G的潜在技术和架构之一.IMT-2030《6G智能内生网络架构》白皮书中(“智能内生的关键技术”章节)和《6G网络架构愿景与关键技术展望》白皮书中,明确提出“语义通信:语义驱动、万物智联”.2023年4月,IMT-2030(6G)网络技术工作组已接近完成“语义通信及语义认知网络架构研究”白皮书,准备正式发布.
在光无线通信(OWCs)方面,IEEE 802.11标准中包含可见光通信相关内容,IEEE 802.11标准针对短距离可见光通信发布,IEEE 802.15.13对于高带宽可见光通信进行了定义说明.
在超大规模MIMO方面,IMT-2030(6G)推进组于2021年发布了超大规模MIMO天线研究报告.同时该技术也在3GPP R18与R19中得到说明.
在通信感知一体化(ISAC)方面,IEEE 802.11bf于2020年成立,专注于无线局域网(WLAN)传感与感知.并且,3GPP SA1于2022年3月也开始了关于ISAC的研究项目.
由于通信技术的持续发展和业务需求的不断丰富,6G将提供更加全面和高质量的通信体验,并将拥有在导航定位、通信等各个方面远超5G的性能.
6 总结
本文基于国内外研究成果,旨在通过总结移动蜂窝网络定位技术的发展,对定位原理与数据进行分析.重点研究4G LTE、5G NR到6G的主流定位技术演进过程,分析了其性能、优缺点和关键技术.总结了移动通信网络中的定位方法,以及正在使用的协议标准中移动通信定位的需求变化.同时,分析了移动通信定位过程中的关键问题.随之说明移动通信信号导航定位系统在未来的发展中将大放异彩.研究结果表明:
1)移动通信系统越来越注重定位与通信相结合,以提高用户的空间感知能力.一方面可在移动通信的接收信号中提取定位所需参数用于定位解算,如利用下行链路信号(PSS、SSS等)估计TOA/TDOA;另一方面移动通信信号在信号体制设计中考虑了定位精度,如利用提前设计好的参考信号(SRS、SSB等)估计TOA,3GPP协议中对降低移动通信网络端到端延迟不断提出新要求.从信号结构层面提升定位性能,未来通信和定位结合将更加紧密.
2)在全球卫星导航系统受到挑战时,使用地面丰富的移动通信信号进行定位无疑是一个最佳选择.截至2022年底,全国移动通信基站总数达1 083万个.其中5G基站为231.2万个,全年新建5G基站88.7万个,占移动基站总数的21.3%.网络覆盖能力的持续增强为移动蜂窝网络定位技术的发展夯实了可靠基础.移动通信技术可以直接利用手机或其他移动设备的硬件进行定位,无须额外的硬件设备,具有便捷性等优点.移动通信标准的升级还带来了更高的安全性和隐私保护,如LTE Release 14引入的安全和隐私增强技术和5G NR Release 16引入的私有网络等技术,可以更好地保护用户的通信安全和隐私.
猜你喜欢
数学小灵通·3-4年级(2021年9期)2021-10-12
小哥白尼(趣味科学)(2021年11期)2021-02-28
小天使·一年级语数英综合(2020年10期)2020-12-16
小学生学习指导(低年级)(2020年10期)2020-11-09
探索科学(2017年4期)2017-05-04
数学大王·中高年级(2017年2期)2017-02-08
中国交通信息化(2016年8期)2016-06-06
学苑创造·A版(2016年4期)2016-04-16
自动化学报(2016年8期)2016-04-16
移动通信(2015年17期)2015-08-24