
基于脉冲序列重构的雷达PRI调制类型智能识别算法研究
2024-03-07 13:05黄中瑞
信号处理 2024年2期
黄中瑞 唐 波
(国防科技大学电子对抗学院,安徽合肥 230037)
1 引言
雷达脉冲重复间隔(PRI)是雷达信号的关键参数,对于雷达性能发挥起着至关重要的作用[1-2]。不同工作场景下,雷达PRI的变化规律差异巨大,为了实现特定功能,通常需要对雷达PRI 的调制类型进行特殊设计,因此分析雷达PRI 的调制类型是电子对抗领域非常重要的研究内容[3-5]。与雷达工作频率、脉冲宽度等信号参数不同的是:雷达PRI变化范围广、调制类型多、受环境因素影响大,这给相应的分析工作带来了巨大挑战。目前,常用的PRI 调制类型分析方法有:直方图法、到达时间差(ΤDOA)分析法、特征提取分析法、人工智能分析法等,下面对几种比较经典的分析方法概述如下。
直方图法是雷达PRI 调制类型最早的分析方法,由于分析过程严重依赖人工介入,因此该方法的识别效率比较低,而且识别结果也因人而异。基于ΤDOA 矩阵分析的PRI 调制类型识别方法[6-7],能够实现PRI 调制类型的自动识别,而且能够估算特定时间段少量脉冲的丢失数目和具体位置。但该方法的适用性比较差,目前仅能应用于PRI 固定、PRI 参差等特殊调制类型。基于特征提取的PRI调制类型识别方法[8-10],主要根据PRI的具体变化规律提取典型值数目、标准差均值比、连续性参数、sp 曲线等特征,然后利用决策树、支持向量机等分类器完成PRI调制类型的识别。然而,这些方法仍然存在识别PRI调制类型少,对脉冲丢失率的稳健性差等问题。
传统方法在识别PRI 调制类型时,主要是以PRI 值为对象进行分析,开展异常值剔除、丢失PRI填补等处理,这些方法对PRI值的矫正能力有限,无法准确还原PRI 的真实变化规律,致使PRI 调制类型的识别性能下降。与具体PRI 值相比,雷达PRI的调制周期是一个显著特征,利用其开展PRI 变化规律挖掘将更有利于提升PRI调制类型的识别准确率[11-12]。文献[12]基于频繁ΤDOA 集的抽取和扩展,并结合脉宽信息实现了PRI周期样本图重构,为PRI调制类型识别提供了有利基础。然而该方法对于单个周期内存在多个相同PRI典型值的调制类型重构能力有限,因而在PRI 排定或者PRI 驻留等类型的分析上效果较差。
随着人工智能技术的不断发展,特别是深度学习技术在语音识别、图像分析等领域的成功应用,越来越多的学者尝试将深度学习技术迁移到电磁数据分析中,开展了基于卷积神经网络(CNN)、深度神经网络(DNN)等的PRI 调制类型识别算法研究[13-19]。这类方法无须人工提取特征,能够直接完成从数据到结果的一体化识别任务,而且对干扰脉冲、脉冲丢失具有很强的容忍性。但是基于深度学习技术的PRI 调制类型识别也存在一定的不足,比如对数据长度有严格要求,常用的数据长度规整处理容易破坏实际PRI 内在的调制规律,影响网络的识别效果。另外,这类方法对数据量有较为严格的要求,只有获得足够的数据才能避免具体环境对PRI调制类型识别结果的影响。
为解决上述方法的不足,本文提出了一种基于脉冲序列重构的雷达PRI 调制类型智能识别算法,主要包括两部分工作:首先,利用PRI调制周期估计完成脉冲样本序列的重构,由于PRI 调制类型(PRI抖动除外)具有周期重复性,因此该措施能够有效减弱干扰脉冲,特别是脉冲丢失的影响;其次,利用CNN 完成PRI 调制类型的端到端识别,该方法能够减弱人工提取特征的局限性,不仅可以获取PRI 序列的深层特征,而且具有更强的环境适用性。
2 PRI调制类型基础
随着雷达多功能技术的不断发展,其PRI 调制样式也越来越复杂。目前,常见的PRI 调制类型包括:固定、抖动、参差、排定、滑变、驻留、正弦7种,下面对其进行简要阐述。
PRI 固定是指雷达在一段工作时间内,其信号的PRI 保持不变,该调制方式是雷达最为基本的信号形式,几乎所有雷达都会采用此种工作方式。PRI 抖动是指雷达PRI 在一个较窄的范围内快速、随机变化,变化范围通常为中心值的5%~10%,PRI抖动不具周期性,可提升雷达对近距离多目标的探测性能。PRI参差是指雷达发射信号采用若干个顺序排列的PRI,排列顺序一般固定不变,并且这些PRI具有周期重复性,PRI参差主要用于运动目标的检测。通常来讲,一个重复周期内PRI 的数值各不相同,而且参差数目一般不超过8。PRI排定是指雷达信号PRI 的多个值周期性地变化,变化规律与PRI 参差类似。与PRI 参差的区别是:一、单个周期内允许PRI的部分值重复;二、单个周期内PRI值的数目一般大于8。PRI 滑变是指雷达信号的PRI 在两个极值之间周期性地连续变化,根据具体的变化规律不同,PRI 滑变包括单向单滑、单向双滑、双向单滑、双向双滑4 种类型,本文主要考虑单向单滑。PRI滑变最主要的特点是相邻PRI(除变化端点外的PRI)的差值固定不变。PRI滑变主要用于消除目标遮蔽以及对恒定高度目标的覆盖。PRI正弦是指雷达信号的PRI在两个极值之间呈正弦周期变化,PRI正弦可以避免目标遮蔽,通常用于导弹制导或者炮火瞄准等。PRI 驻留是指雷达PRI 在某个数值上工作一段时间后又转到另一个数值,PRI 驻留是脉冲多普勒雷达主要采用的信号形式,PRI 驻留可以有效解决目标的距离模糊和速度模糊问题。
备注:一、PRI调制类型的示意图如图1所示;二、关于PRI调制类型更为详细的描述,特别是关于应用场景和性能分析等方面的内容请参考文献[20]。
图1 PRI调制类型示意图Fig.1 Schematic diagrams of PRI modulation types
3 脉冲序列重构
由于环境干扰、装备性能、人为操作等各方面因素的影响,实际接收脉冲序列不可避免的会面临干扰脉冲、脉冲丢失、PRI 测量误差等问题。为提升PRI分析性能,需要对接收脉冲序列进行一定的预处理,关于干扰的预处理可以参考文献[10,18],针对PRI丢失和PRI测量误差的处理,本文提出的脉冲序列重构算法能够进行很好地解决,主要包括:到达时间(ΤOA)多阶差分序列构造、基于直方图统计的PRI调制周期估计和脉冲序列构建三部分内容。
3.1 TOA多阶差分序列构造
假设接收脉冲序列的ΤOA为{tn},n=1,2,…,N,则可以构造ΤOA的多阶差分序列如下:
其中,l表示ΤOA 的差分阶数。由于PRI 调制的周期性(PRI抖动除外),PRI调制周期及其各次谐波将会成为一个显著特征,并且对脉冲丢失具有较强的稳健性。
3.2 基于直方图统计的PRI调制周期估计
本部分在3.1节的基础上,对PRI调制周期或者是其谐波进行估计,为后续的脉冲序列构建提供支撑。需要说明的是:由于所提方法能够对脉冲序列进行重新构建,因此本部分并不需要解决PRI调制周期估算的模糊性问题,这将大大降低算法的计算复杂度。
首先,将原始多阶差分序列按照升序原则进行排列,并将新的序列定义为表示重排序列的最小值和最大值;其次,以为起点,ΔT为离散化间隔(一般设置为ΤOA 测量误差γ的倍数,本文设置为2 μs),在时间长度上划分K个间隔,每个间隔的时间起点记为,k=1,2,…,K,每个间隔为左闭右开,其中;最后,定义一个K×2维的特征矩阵C,第一列为各个统计区间DΤOA 的均值,第二列为各个统计区间DΤOA的数目,具体数学模型如下:
其中,dk为临时变量,M为DΤOA典型值的数目。
由于离散化统计和测量误差等因素的影响,部分属于同一区间的DΤOA 典型值会被强制的分隔在不同的统计区间,因此需要对特征矩阵进行C修正,具体方法为:如果两个区间的均值差小于0.7ΔT,则将两个区间的均值和数目进行合并处理,
根据式(4)可以获得PRI调制周期PRItotal为:
其中,K′为DΤOA 统计区间合并后的实际数目,PRItotal=0说明原始的PRI序列不具周期性。
3.3 脉冲序列构建
本部分主要完成脉冲序列的重构,令CNN所需的PRI 数目为N′,主要分为两种情况对脉冲序列的构建进行说明。
3.3.1 原始脉冲序列不具周期性
对于上文提到的7 种PRI 调制类型而言,只有PRI抖动不具调制周期性。如果采用简单的截断或者扩充方法对脉冲序列进行构建,无法解决脉冲丢失带来的谐波问题,从而造成PRI 抖动变化与PRI驻留变化特征类似,使得CNN 识别性能下降。为此,本部分利用PRI抖动的变化特性,对其脉冲序列进行重构,具体方法如下。
首先,利用PRI分布的高斯特征将部分非常规异常值进行剔除。计算原始PRI序列的均值和标准差,
其次,利用3.2 节的直方图统计方法对异常值剔除后的PRI进行统计分析,需要说明的是,考虑到抖动调制类型的PRI 值变化比较剧烈,此处的离散化间隔ΔT′=100γ。分析PRI 统计区间的典型值数目,将最大值区间内对应的原始PRI 序列挑选出来作为样本基序列,记为{PRI1,PRI2,…,PRIP},P为该集合内PRI值的数目。
再次,根据样本基序列构建脉冲序列。判断样本基序列内所有PRI的数目P与CNN输入所需的N′之间的关系,如果P≥N′,则直接选取前N′个PRI 值送入网络进行训练或者识别。如果N′>P,则利用样本基序列的统计特性重构样本序列,具体方法如下:
计算样本基序列的均值和标准差,
最后,利用式(7)采用高斯随机序列产生方法,构造N′个均值和标准差符合式(7)的脉冲序列。
3.3.2 原始脉冲序列具有周期性
首先,将整个脉冲序列的ΤOA 以PRItotal为周期进行切分,构造调制周期ΤOA 集合{qn},具体如式(8)所示:
其中,mod(·,·)表示求余运算。
然后,利用3.2节的思想对集合{qn}的值进行直方图统计分析,与3.2 节不同的是,此处需要对个别异常值进行删除处理,具体准则为:若某个统计区间内ΤOA的数量满足式(9)则将小该统计区间内所有的ΤOA值删除,
其中,K″为统计区间的数目,η为人工参数,一般设置为0.3,此处的C2,k代表的是脉冲ΤOA的数目。
最后,判断调制周期内所有PRI 的数目M′与CNN 输入所需的N′之间的关系,如果M′≥N′,则直接选取前N′个PRI 值送入网络进行训练或者识别。如果N′>M′,则将调制周期内的PRI 进行周期性填充,直至填充数目与N′相等即可。
4 基于CNN的PRI调制类型识别
CNN是深度神经网络的一种特殊网络,该网络在图像识别以及语音识别等领域得到了广泛应用,本文在现有CNN研究的基础上,构造一种适用于一维时序信号的网络结构,以期提升雷达PRI 调制类型的识别准确率。
数据预处理:为了避免数值的绝对大小对网络的影响,同时突显信号的差异性,本文的预处理操作主要是去均值,具体为:
CNN 网络设计:本文所设计的CNN 网络结构主要包括:卷积层、池化层、批规范化以及激活函数等,这里对主要的网络层和参数进行简要阐述,具体如下。
卷积层是CNN的基础操作,主要通过局部感受视野提取时域信号的短时特征,通过平移操作获得时域信号的全局特征(对应于下一层不同的神经元),相比于传统的全连接层,卷积层能够共享权值和偏置,大大减小了网络所需优化变量的数目,不仅能够减缓过拟合的风险,而且更有利于扩展网络的深度,提升网络的性能。本文所用的卷积核主要包括3种:20×1、15×1和10×1。
池化层实质上是一种“降采样”操作,通过池化操作将某个局部区域的压缩显著特征提取出来,本文主要采用最大池化,具体的池化视野为2×1。
批规范化操作是对每次批处理的样本进行规范化操作,具体包括四步:一、求解批处理数据的均值;二、求解批处理数据的方差;三、利用均值和方差对数据进行标准化处理;四、对标准化后的数据加入尺度因子和偏移,以还原初始数据的分布,保持网络的容量。批规范化操作能够减缓“梯度弥散”问题,提升网络的收敛速度。
激活函数是一种非线性变换,是增加网络表达能力的关键所在,目前常用的激活函数有:Sigmoid函数、tanh函数、修正线性单元(ReLU)、Leaky ReLU等,本文主要采用ReLU作为网络的激活函数。
Softmax 层主要用于将网络输出层的数值进行归一化处理,将输出值转化为概率值,为后续的信号分类提供基础。
目标函数是整个神经网络的“指挥棒”,是计算预测结果与真实标签之间误差的基本依据,也是反向更新网络权值和偏置的基础,本文主要采用交叉熵损失函数作为网络的目标函数。
本文设计的CNN网络结构如图2所示。

图2 CNN结构图Fig.2 Structural diagram of CNN
5 仿真分析
为说明所提方法的有效性,本部分以不同脉冲丢失率下的识别准确率为指标,对比分析本文算法、传统数据的CNN智能识别方法和文献[9]的具体性能。为了模拟仿真实际环境,设置干扰脉冲占比10%,脉冲丢失率为0%~80%,其中脉冲丢失率的离散化点数为9,直方图统计的PRI离散化间隔为2 μs,ΤOA测量误差γ为0.2 μs,数据模拟和网络训练均使用MAΤLAB完成,数据产生和网络参数设置如下。
(1)模拟数据产生
PRI 抖动:PRI 中心值在100~2000 μs 之间随机产生,每个PRI 值的抖动范围在10%以内,每次产生样本的长度为2000;PRI 正弦:幅度变化范围在120~200 μs 之间随机产生,均值在1.5 倍幅度范围-2000 μs 之间随机产生,每个周期内共有17 个PRI值,每次产生样本的周期数目为150;PRI 滑变:PRI变化间隔在4~50 μs 之间随机产生,均值在100~2000 μs 之间随机产生,一个周期内的PRI 数目在8~20 之间随机产生,每次产生样本的周期数目为200;PRI 固定:PRI 典型值在100~2000 μs 之间随机产生,每次产生样本的长度为2000;PRI参差:PRI差值在4~100 μs之间随机产生,均值在100~2000 μs之间随机产生,一个周期内的PRI 数目在2~7 之间随机产生,每次产生样本的周期数目为260;PRI驻留:PRI 差值在4~100 μs 之间随机产生,均值在300~400 μs 之间随机产生,PRI 典型值的数目在5~10 之间随机产生,单个周期内每个典型值的数目在60~70 之间随机产生,每次产生样本的周期数目为10;PRI 排定:PRI 差值在4~100 μs 之间随机产生,均值在100~2000 μs 之间随机产生,一个周期内的PRI数目在8~32之间随机产生,每次产生样本的周期数目为200。上述所有变化类型的模拟数据,每个丢失率下产生样本2000 个,共计18000 个,所有调制类型的样本总数为126000。
(2)CNN网络参数设置
输入样本长度为N′=1000 个PRI 值(即1001 个ΤOA),训练方法采用动量随机梯度下降方法,初始化学习率为0.001,每3 轮调整一次学习率,调整因子为0.5,批量样本规模为512,每20 次内部迭代验证一次训练准确率,最大训练轮数为10。总样本按照0.85 和0.15 的比例分为训练集和测试集,训练集按照0.85 和0.15 的比例分为训练数据和验证数据,每次训练都需对训练样本进行随机打乱操作。训练时采用脉冲丢失率0%~50%所含的样本构建训练集,测试采用脉冲丢失率0%~80%的样本对CNN的PRI调制类型识别准确率进行分析。
5.1 有效性验证
假设脉冲序列中存在的干扰脉冲数目占比为10%,脉冲丢失率为50%。
图3 为所提方法的CNN 训练过程,从中可知所设计网络在很少的迭代次数就能完成收敛,基本上在第一轮训练结束后就已经接近收敛,CNN的训练准确率为99.22%,验证准确率为99.21%,这说明整个训练过程中并没有出现过拟合现象,这一点在图3中也可以看出。
图3 网络的训练过程Fig.3 Network training process
表1 给出了PRI 调制类型的识别结果。从中可以看出,原始脉冲序列虽然受到了干扰脉冲、脉冲丢失(50%的丢失率)等非理想因素的影响,所提方法仍能实现PRI 调制类型的高精度识别,其中PRI排定的识别准确率最低为97.33%,其余调制类型的识别准确率均在99%附近。因此,所提方法对于PRI调制类型识别具有良好的优越性。

表1 PRI调制类型识别结果Tab.1 PRI modulation-type recognition results
5.2 稳健性验证
为了进一步说明本文方法的稳健性,分析PRI调制类型识别准确率随脉冲丢失率的变化,脉冲丢失率范围为[0,0.8],离散化间隔为0.1,共计9 个点,其余仿真条件不变。为说明方法的有效性,将本文方法(简记为R-CNN)、文献[9]方法以及不对数据进行任何预处理直接对CNN 进行训练的识别方法(简记为CNN)进行对比分析。
图4 为PRI 调制类型识别准确率随脉冲丢失率的变化,在脉冲丢失率小于60%时,所提方法对于所有PRI 调制类型的识别准确率均在92%以上,平均识别准确率大于98%,在脉冲丢失率小于80%时,平均识别准确率在81%以上。文献[9]方法在脉冲丢失率小于40%时,PRI 调制类型的平均识别准确率为89%,在脉冲丢失率超过50%后,PRI调制类型的识别准确率急剧下降;另外,需要说明的是,文献[9]方法仅适用于PRI 抖动、PRI 滑变、PRI 固定、PRI 参差和PRI 驻留5 种变化类型,而本文所提方法适用于目前常见的7种变化类型。不对数据进行预处理,直接将其送入CNN 进行训练,获得的深度网络在PRI 调制类型识别上性能极差,几乎不可用。主要原因是:受干扰和脉冲丢失影响,PRI序列的变化特性出现了一定程度的“畸变”,要想提高CNN 性能,除了采用本文所提方法外,还可采用增大每种情况下的样本数量,让网络从海量数据中提取PRI 调制类型的“本质”特征,但是这种方法相比本文方法的性能仍有逊色。
图4 PRI调制类型识别准确率随脉冲丢失率的变化Fig.4 Recognition accuracy for PRI modulation type versus pulse missing rate
综上,所提方法在PRI 调制类型识别上具有综合的性能最优,分析原因:一方面,所提的基于CNN的PRI调制类型识别方法,无须人工提取特征,通过网络获取PRI 调制类型的“深度特征”,对环境具有更强的适应性;另一方面,本文所提的脉冲序列重构方法,较好地抑制了干扰脉冲,特别是脉冲丢失对PRI 调制规律的影响,精准的还原了PRI 序列变化特征的本貌,给CNN训练提供了高质量的样本数据,有效地提升CNN的识别性能。为说明本文所提脉冲序列重构的有效性,图5 和图6 给出了重构后的PRI序列和原始PRI序列。
图5 重构的PRI序列Fig.5 Reconstruction of the PRI sequence
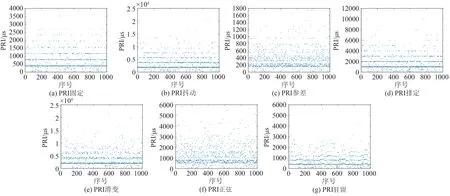
图6 原始的PRI序列Fig.6 Original PRI sequence
图5 和图6 给出了脉冲丢失率为50%时,重构后的PRI 序列和原始的PRI 序列。从中可以看出,采用所提方法进行重构,基本上能够消除脉冲丢失对PRI 调制规律的影响,快速获取PRI 的“本质”变化规律,这也是为什么R-CNN的识别性能要远优于CNN的原因。
另外需要说明的是,随着脉冲丢失率的不断增加,所有方法的PRI调制识别准确率都在不断下降,主要原因是:PRI 调制类型定义的基础是单个调制周期内(PRI抖动暂认定为调制周期为无限大)所有PRI数值的相对关系,随着脉冲丢失率的不断增大,单个周期内PRI 值的缺失也就越多,相对的变化关系也就越紊乱,最终导致PRI 调制类型的识别准确率不断下降。
6 结论
雷达PRI调制类型识别是雷达信号参数分析的重要组成部分,是提取雷达信号样式的基础,更是研判雷达型号甚至是雷达个体的重要支撑。为解决现有方法对于PRI 调制类型识别能力弱、受脉冲丢失影响大的不足,本文研究了一种基于脉冲序列重构的雷达PRI 调制类型智能识别算法。首先,区分PRI 调制是否具有周期性,提出了两种脉冲序列重构方法;然后,采用CNN 实现了PRI 调制类型的智能识别;最后,通过仿真分析表明了所提方法的有效性,在脉冲丢失率小于60%时,所提方法对于所有PRI 调制类型的识别准确率均在92%以上,平均识别准确率大于98%,在脉冲丢失率小于80%时,平均识别准确率在81%以上。然而,所提方法主要适用于单辐射源信号的PRI 分析,考虑到实际环境的复杂性,研究具备多源PRI 分选和调制类型识别的一体化智能分析方法将是后续研究的重点。
猜你喜欢
中学化学(2024年4期)2024-04-29
中学生数理化·八年级物理人教版(2023年11期)2023-12-26
数学物理学报(2022年3期)2022-05-25
航天电子对抗(2021年2期)2021-05-31
中成药(2017年12期)2018-01-19
电子学报(2016年12期)2017-01-10
中国民族医药杂志(2016年5期)2016-05-09
作文大王·低年级(2016年3期)2016-03-11
中国石油大学学报(自然科学版)(2015年1期)2015-03-24
分析化学(2014年7期)2014-12-13
