
用于微塑料分离收集的智能沙滩垃圾处理机
2024-03-05 12:13王金莲姚宇豪易永余娄胜杰
机械制造 2024年1期
王金莲 姚宇豪 易永余 娄胜杰
杭州科技职业技术学院 智能工程学院 杭州 311402
1 设计背景
随着塑料的广泛使用和人类沙滩活动的频繁,沙滩污染问题日渐严重[1-3]。2021年我国海洋生态环境状况公报指出,海滩垃圾数量为154 816 个/km2,平均密度为1 849 kg/km2。其中,塑料类垃圾数量最多,占75.9%,主要为香烟过滤嘴、泡沫、塑料碎片和包装类塑料制品等。微塑料指直径小于5 mm的塑料纤维、颗粒或碎片[4]。微塑料在海洋和沙滩广泛分布,会直接或间接进入人体内部,严重影响人类健康,在沙滩垃圾处理中应该首先考虑[5-6]。
人工清理沙滩垃圾成本高,效率低,国内现有的机械清理设备则大多占地大,价格高,智能化程度低[7]。因此,沙滩垃圾处理机的智能化、小型化是一个研究热点。Cherian等[8]开发一款利用超声传感器导航,通过风扇实现分离轻重垃圾的四轮轻型沙滩垃圾处理机。Hidaka等[9]提出一种基于训练深度学习模型建立的能够自动识别不同大小海滩垃圾的人工智能技术。冯泓骞等[10]基于螃蟹运动特征,设计了仿生沙滩垃圾清理装置。狄飞等[11]设计了一款通过卷积神经网络模型来识别垃圾类型,并实现厨余垃圾、可回收垃圾和其它垃圾分类的垃圾收集处理设备。以上研究分别以机械结构、智能算法等为侧重点设计了智能小型沙滩垃圾处理机,但设备都没有涉及对大中小型塑料垃圾,特别是微塑料分类收集的考虑。
笔者设计了一款基于机器视觉识别塑料垃圾,并能实现大中型垃圾和小微塑料垃圾分类收集的智能沙滩垃圾处理机,制作成整机模型后进行测试。
2 工作流程
智能沙滩垃圾处理机设置有智能控制模块,当识别到沙滩塑料垃圾时,驱动履带行走模块按优选路径运行至合适位置,先后经过进料送料模块、大垃圾分离收集模块、微塑料分离收集模块、沙水分离及水平衡模块,完成垃圾的清理和分类处理。设备工作流程如图1所示,结构如图2所示。

图2 智能沙滩垃圾处理机结构
3 结构
3.1 进料送料模块
进料送料模块如图3所示,由铲子、毛刷、柔性拨板及带传动机构组成。毛刷和柔性拨板绕轴旋转,形成双滚筒。进料送料模块将包含沙子和大小微塑料垃圾的混合物顺畅送入皮带传送机构,传送皮带上设置有挡板。柔性拨板每旋转一圈,进料两次。
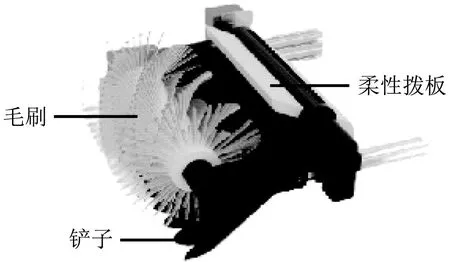
图3 进料送料模块
3.2 履带行走模块
履带行走模块采用齿形带传动,齿形带与带轮之间无相对滑动,传动比恒定、准确。由蜗轮蜗杆直流减速电机提供动力,最大扭矩可达2 000 N·cm,可调控转速。采用H桥电机控制方案,使用芯片驱动。为了消除双电机的差速问题,采用霍尔磁敏编码器,实现双电机的运行速度相同。
3.3 垃圾分离收集模块
垃圾分类收集模块包括振筛机构和小微塑料分离与收集机构,分别如图4、图5所示。利用弹簧悬挂和振动电机组成振筛机构,可将大中型垃圾留在筛网上。配置质量传感器和舵机,控制侧门开启机构。在垃圾超重的情况下,完成向设备外转移垃圾。

图4 振筛机构

图5 小微塑料分离与收集机构
微塑料和细沙进入小微塑料分离与收集机构,采用天然海水作为浮选液,利用密度差直接浮选法实现沙子和小微塑料的分离,再通过水位差收集小微塑料至小微塑料收集箱[12-13]。
3.4 沙水分离及水平衡模块
沙水分离及水平衡模块主要由无轴螺旋分离器组成。无轴螺旋分离器如图6所示,将沙子输送到智能沙滩垃圾处理机外部,实现沙水分离。沙水分离过程中,为应对分离箱海水损失,采用额定电压为12 V的直流微型水泵从自带水箱中抽水,并加装浮球液位传感器,以实现自动水平衡[14-15]。

图6 无轴螺旋分离器
输送量、螺旋直径、螺旋转速、轴功率等是无轴螺旋分离器的重要设计参数,分别计算如下[16-18]。
螺旋外径D为:

(1)
式中:Q为无轴螺旋分离器的输送量;K为物料综合因数,可取0.063 2;λ为物料的单位容积质量,为1 620 kg/m3;φ为填充因数,取0.42;ε为倾斜输送因数,取0.92。
螺距S为:
S=(0.5~2.2)D
(2)
转速n为:
(3)
式中:A为物料综合特性因数,取28。
轴功率P0为:
P0=(QωLcosα+QLsinα)/367
(4)
式中:L为输送机的输送距离;α为螺旋轴倾斜角度;Lsinα为输送机水平投影高度;Lcosα为输送机竖直投影高度;ω为物料运动阻力因数,取3.2。
电动机功率P为:
P=K1P0/η
(5)
式中:K1为功率储备因数,取1.2~1.4;η为电动机传动效率,取0.9。
设计无轴螺旋分离器输送量为1.8 t/h,代入式(1)计算,并按最接近的标准尺寸取整螺旋外径为0.1 m。考虑到无轴螺旋倾斜布置,螺距S取0.6D,为0.06 m。由式(3)计算取整可得转速n为2.5 r/min。
轴功率P0应至少包含物料输送功率及倾斜角度引起的附加功率等,输送距离需超过垃圾收集框长度。输送机输送距离500 mm,螺旋管倾斜15°摆放,由式(4)、式(5)计算可得轴功率P0为8 W,电动机功率P为13 W。选用额定功率为 21 W的直流减速电机,额定转速为 60 r/min,减速比为 90,利用变频器脉宽调制控制电机转速。
4 控制方案
4.1 控制系统框图
智能沙滩垃圾处理机的控制系统主要包括主控模块、图像识别处理模块、运动控制模块、功能拓展模块四部分,控制系统框图如图7所示。控制系统采用光伏太阳能板及电池组供电。
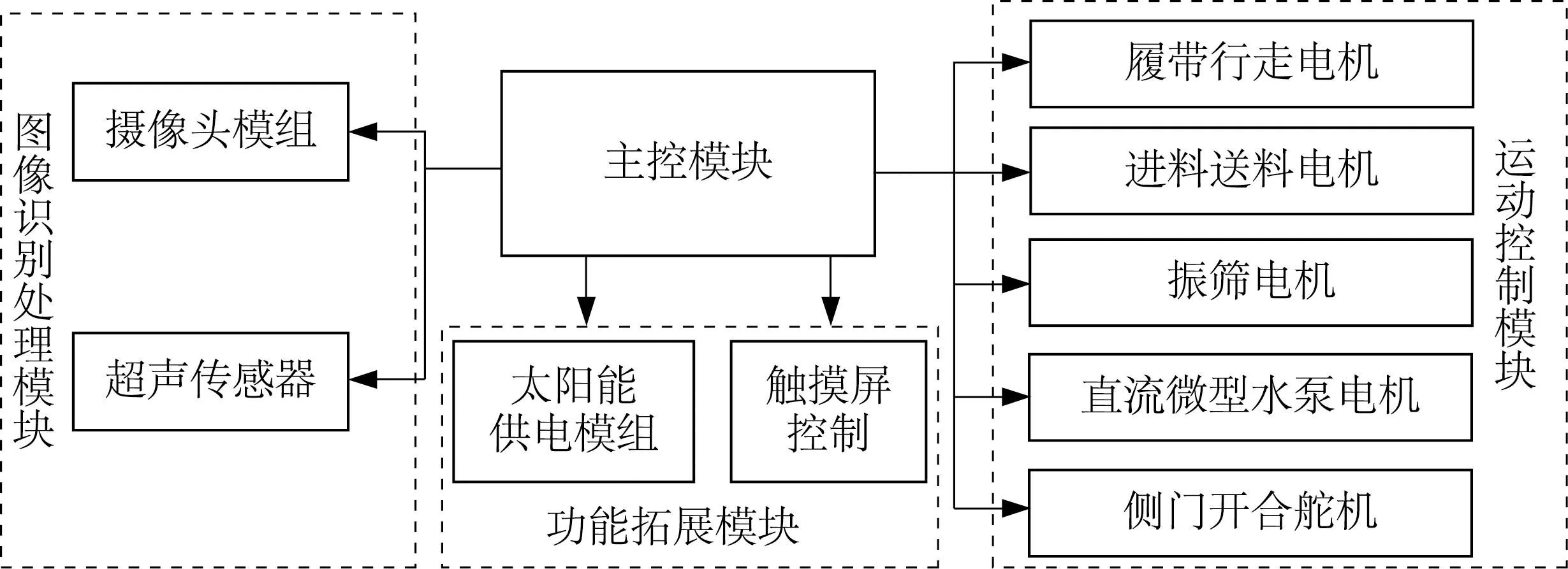
图7 控制系统框图
4.2 主控模块
主控模块采用STM32F407VET6单片机,具有极强的处理能力,能满足操控多路电机、舵机及大量数据处理的需求。支持串行外设接口等多种通信接口,可以方便连接摄像机、超声传感器等外部设备。采用低功耗技术,能实现适应沙滩环境的高电源管理效率。
4.3 图像识别处理模块
摄像头基于开源计算机视觉库的图像识别原理进行垃圾识别。使用IPC-HFW8241E-Z摄像头提供低延迟高清图像,分辨率为3 840像素×2 160像素。采用可见光和红外双光学镜头设计,能够实现白天、夜晚的高清晰度拍摄。具有IP67防护等级,可以抵御恶劣的天气和环境,适合沙滩环境。在顶部的摄像头两侧各安装一个HC-SR04超声测距传感器,测距范围为2~450 cm,数据精确,用于判定垃圾位置和距离。
4.4 运动控制模块
履带行走装置、双滚筒进料机构分别采用涡轮蜗杆直流减速电机,由大功率场效应晶体管驱动。振筛机构采用电压为12 V,转速为6 000 r/min的微型直流扇形振动电机,使用L298N芯片H桥驱动电路。运动控制模块还可以实现分离箱水平衡控制和大垃圾自动侧门开合控制。
4.5 主程序
单片机负责资源调度和硬件驱动,想要实现对图像识别处理模块、运动控制模块等外围模块协调控制,必须要做好整体程序设计。主程序流程如图8所示。经传感器和串行外设接口初始化后,单片机采集摄像机数据。基于开源计算机视觉库的图像识别原理进行图形数据处理,对读入的图像进行降噪和归一化等预处理后,将图像从蓝、绿、红颜色空间转换到根据直观特性创建的颜色空间,利用inRange函数识别出白色、红色等,利用坎尼函数分析物体形状,从而锁定塑料垃圾。一旦确定为塑料垃圾,通过测量超声传感器触发和回波的时间差,计算出沙滩垃圾与传感器之间的距离。驱动履带行走装置按优化路径行走至垃圾处,进行垃圾的分离和收集。每隔120 s采集电量和水位数据。若电量低于电量低阈值,则发出警报,暂停工作。若分离箱中水量不足,则启动水泵从水箱供水。若质量传感器检测到大垃圾箱质量超过2.5 kg,则侧门开启倾倒垃圾。以上流程循环执行,直到设备任务完成或者手动停止。
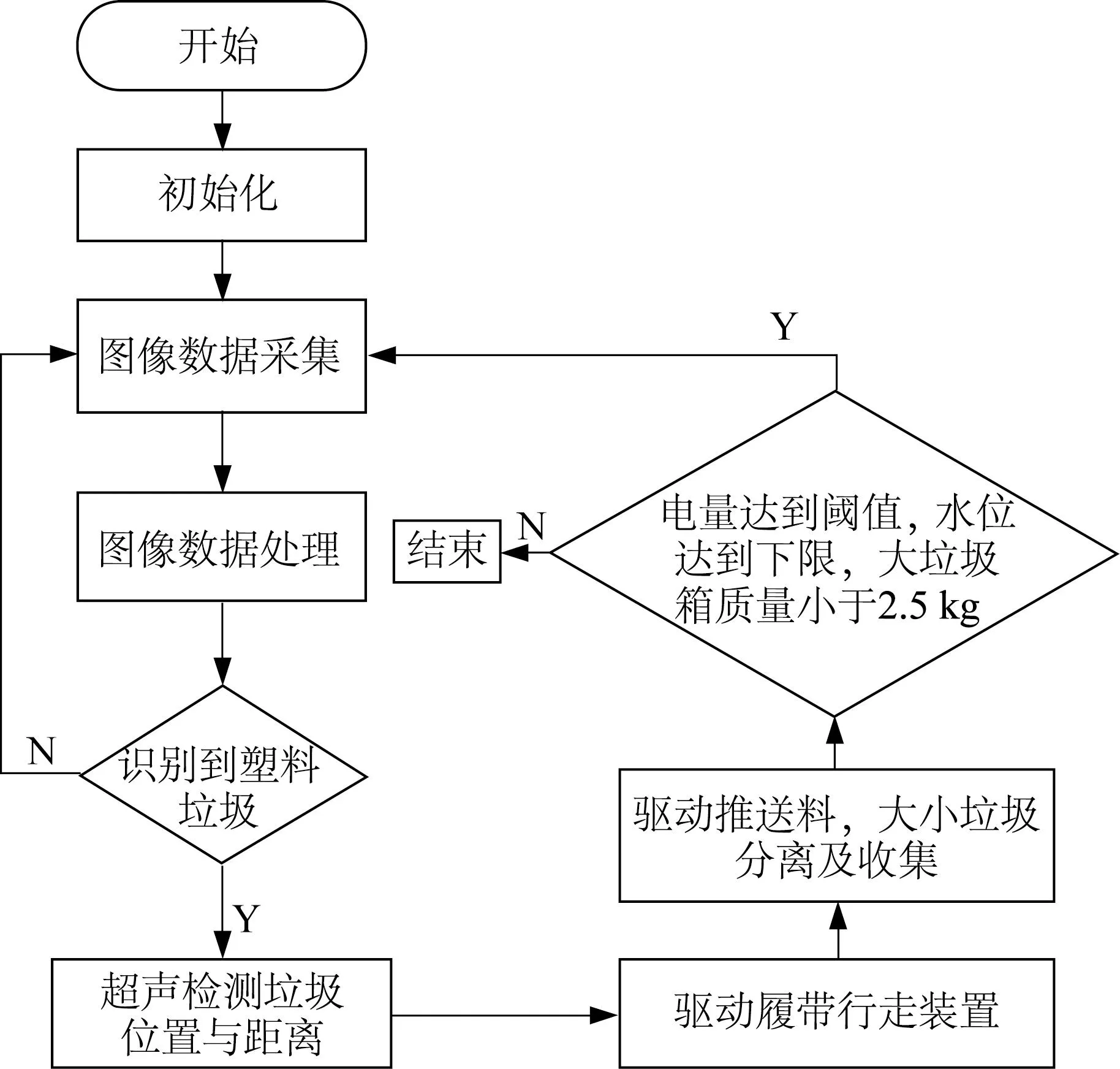
图8 主程序流程
5 测试
综合利用三维打印和加工中心加工等方法制作智能沙滩垃圾处理机样机,外形尺寸为90 cm×40 cm×55 cm,如图9所示。对制作的智能沙滩垃圾处理机样机进行垃圾识别、垃圾处理、水位调节、避障及人机交互测试。在沙滩环境中,摄像头能搜寻到塑料袋、饮料瓶等目标垃圾,并做出识别,识别正确率达93.6%。之后启动履带行走装置到达目标位置,平均位置偏差3.7 cm。垃圾识别处理如图10所示。

图9 智能沙滩垃圾处理机样机
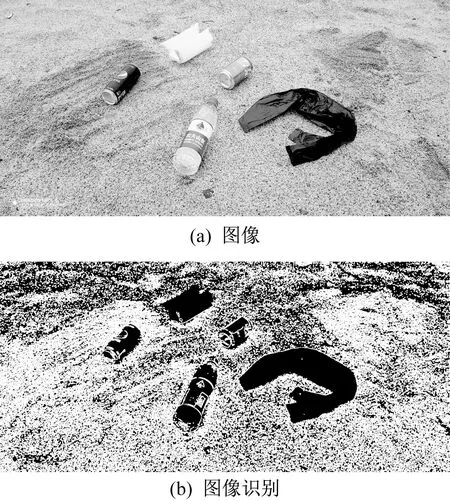
图10 垃圾识别处理
所制作的智能沙滩垃圾处理机样机可顺畅实现进沙送沙、大小微塑料垃圾分离及沙水分离,在60 min的测试时间内,共收集到塑料瓶、瓶盖、烟头等中型垃圾2 106 g,共收集到小微塑料315 g,最小直径为0.13 mm。利用海水浮选微塑料并收集至小微塑料收集箱,如图11所示。

图11 微塑料收集
6 结束语
笔者设计了用于微塑料分离收集的智能沙滩垃圾处理机,利用摄像头成像技术结合,开源计算机视觉库的图像识别原理算法,对塑料垃圾快速识别。利用超声传感器确定垃圾位置和距离,以单片机为主控实现智能垃圾处理。沙子和垃圾混合物送至智能沙滩垃圾处理机后,设置振筛机构,实现大中型垃圾与小微塑料垃圾分离。以海水为浮选液,利用密度差实现沙子和微塑料分离。利用无轴螺旋机构实现沙水分离。智能沙滩垃圾处理机低碳环保,占地面积小,质量小,是沙滩表面微塑料收集处理的有效帮手,可用于沙滩的垃圾清理实践,也可作为机械创新设计实践教学和培训的工具。
猜你喜欢
——幼儿园沙水游戏中材料投放的策略
家长(2022年36期)2022-03-23
数学小灵通·3-4年级(2021年11期)2021-12-02
河北农机(2020年10期)2020-12-14
山西青年(2020年6期)2020-12-08
幸福家庭(2020年11期)2020-09-16
广东第二师范学院学报(2020年3期)2020-06-28
读与写(2019年1期)2019-11-26
小太阳画报(2019年7期)2019-08-08
电子制作(2016年1期)2016-11-07
学苑创造·A版(2016年6期)2016-06-20
