
光电吊舱稳定平台的设计与试验
2024-03-05 12:13:42张海娜苏建华
机械制造 2024年1期
张海娜 赵 坤 苏建华
1.天津航天中为数据系统科技有限公司 天津 300301
2.三生万物(北京)人工智能技术有限公司 北京 100088
1 设计背景
光电吊舱稳定平台技术已经日趋成熟,近些年得到了越来越广泛的应用。光电吊舱稳定平台实现的主要功能是通过稳定和控制技术,有效隔离无人机的振动,实现目标物的稳定图像输出和跟踪[1-2]。笔者详细介绍了一种两轴两框架光电吊舱稳定平台的设计与试验,主要包括稳定平台结构组成、接口与伺服控制设计、回转性能校核等。
对光电吊舱稳定平台进行了多项试验分析,满足指标要求。
2 稳定平台结构组成
光电吊舱稳定平台主要包括机械结构组件、硬件及软件、载荷、内部元器件,如图1所示。稳定平台采用两轴两框架结构形式,机械结构组件包括方位框架、俯仰框架、减振挂载组件[3-4]。硬件包括电源模块、伺服控制板、存储板、视频跟踪板、温控装置等。软件包括伺服控制软件、上位机软件。光电吊舱内部搭载三种传感器载荷,分别是可见光摄像机、中波制冷型热像仪、激光测距机。其余内部重要元器件包括驱动电机、驱动器、测角编码器、光纤陀螺仪,以及保证光电吊舱回转性能的光电滑环等。

图1 光电吊舱稳定平台结构组成
3 电光吊舱主体框架
光电吊舱主体框架包括方位基座组件、方位俯仰支架、俯仰球组件三部分,两轴两框架光电吊舱整体结构如图2所示。方位基座组件中的方位轴系带动方位俯仰支架进行方位回转运动。方位俯仰支架作为俯仰轴系和俯仰球组件的支撑框架,在方位直驱力矩电机驱动下,带动俯仰部分跟随方位轴完成回转。方位轴系包括方位直驱力矩电机、方位编码器、深沟球轴承、方位轴、方位滑环及其它连接件。方位电机与方位轴相连,方位轴上布置有两个深沟球轴承,起到回转支撑的作用。方位编码器通过转接轴与方位轴相连。方位滑环实现方位基座组件与俯仰组件之间的设备电气连接,保证方位可以360°连续旋转。俯仰轴系包含俯仰直驱力矩电机端组件和俯仰编码器端组件,分别安装在方位俯仰支架的两侧,与中间的俯仰球组件连成一体。在俯仰电机驱动下,俯仰组件完成回转运动。光电吊舱轴系连接结构如图3所示。

图2 两轴两框架光电吊舱整体结构

图3 光电吊舱轴系连接结构
俯仰电机端模块包含俯仰电机、深沟球轴承、俯仰电机轴和一些其它连接零件,俯仰编码器端模块包含俯仰编码器、深沟球轴承、俯仰编码器轴和一些其它连接零件。俯仰球组件主要有俯仰球主支撑架、俯仰前球壳、俯仰后球壳、俯仰下球壳和位于球内部的俯仰内框架组件。俯仰球主支撑架包括上球壳和左右侧板。俯仰前球壳上装有各载荷视场玻璃,俯仰后球壳上装有干燥剂模块,俯仰下球壳上设有通用串行总线对外接口。光电吊舱俯仰球组件结构如图4所示。俯仰球主支撑架上装有两个电源模块,除这两个电源模块外,其余组件全部置于球体内部的俯仰内框架上。在装配时,先将俯仰内框架上的所有部件安装完成,作为一个整体插入装有电源模块的俯仰球主支撑架上。位于球体内部的俯仰内框架组件主要包含光电载荷、光纤陀螺、电源板、电源转换模块、方位电机驱动器、伺服控制模块、红外视频存储板、温控装置、干燥模块、温度采集模块和其它安装连接件等。光电载荷包括红外、摄像机、激光器。光电吊舱俯仰内框架组件结构如图5所示。光电吊舱基座与基座盖板之间、方位俯仰支架与支架侧盖之间、俯仰球壳与俯仰球主支撑架之间,以及其它任意两个结构件的接合平面都设置有安装密封条的密封槽,通过螺钉连接方式压紧密封条,并采用带有密封保护的轴承,保证光电吊舱内部的密封性能。方位回转使用光电滑环,方位组件可以360°旋转。

图4 光电吊舱俯仰球组件结构

图5 光电吊舱俯仰内框架组件结构
无人机的振动对光电吊舱的成像质量具有很大的影响,隔振结构能够有效隔离无人机的抖动,使光电吊舱内部载荷更稳定[5-6]。光电吊舱设计为两级减振的形式。第一级减振选用三维等刚度隔振器,主要隔离垂向的振动干扰。第二级减振采用钢丝绳减振系统,主要隔离横向的振动干扰。光电吊舱挂载两级减振如图6所示。这一减振结构经过振动试验验证,隔离振动效果良好。
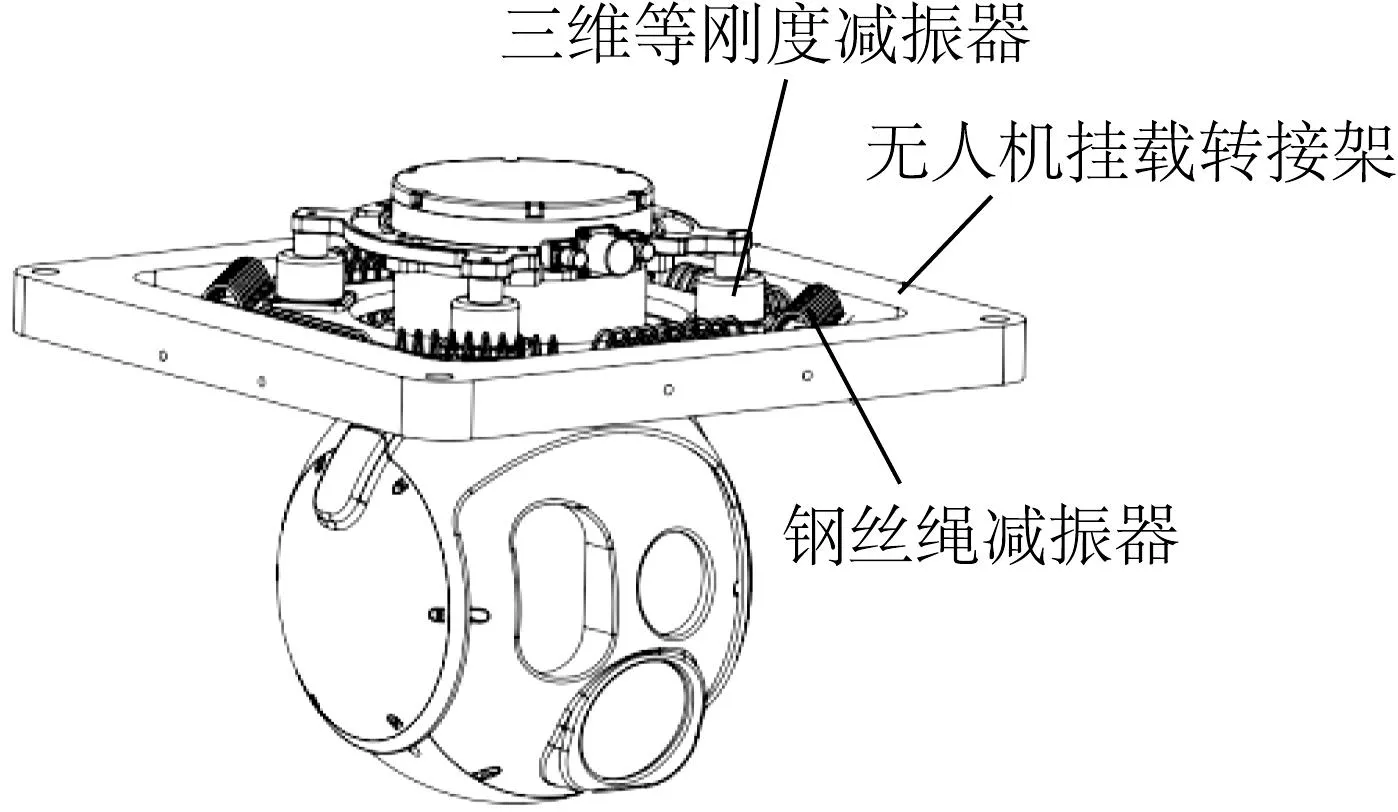
图6 光电吊舱挂载两级减振
4 接口与伺服控制设计
光电吊舱设计了电源接口和通信接口。无人机对光电吊舱进行供电,通信接口用于接收地面控制单元对光电吊舱的控制指令,并返回光电吊舱的工作状态信息。通信接口可在光电吊舱断电状态下读取可见光和红外存储视频数据。光电吊舱内部供电考虑电源信号的电磁屏蔽,外部电源在接入电源模块之前需要先经过滤波器,输出的电源主要为方位与俯仰驱动器供电。电源模块还为伺服控制板和电源转换板供电,伺服控制板为可见光摄像机、视频跟踪板、方位与俯仰编码器、主控供电。光电吊舱伺服控制板可以完成伺服控制软件的功能自检及外部设备的上电自检,接收外部控制指令,完成光电吊舱不同工作状态的设置。
系统软件设计主要包括伺服控制模块、信号采集模块、通信模块软件设计[7-8]。伺服控制模块作为系统的主控制器,完成整个系统的控制和管理。信号采集模块采集陀螺角速度信息、角加速度信息、编码器角度位置信息。通信模块完成接收外部控制指令、回传状态信息、设置可见光摄像机和红外相机工作模式等工作。
5 光轴平行度调校与稳定精度测试
光电吊舱中的可见光摄像机、中波制冷型热像仪、激光测距机间光轴平行性的标定与测量是光电吊舱设备调校与测试的重要环节[9-10]。在对光学载荷装配结构进行设计时,设计了对光学载荷安装位置的微调结构。在完成装配后,进行光轴平行性测量,以可见光摄像机视场中心基准测量激光测距机与可见光摄像机的光轴平行度,中波制冷型热像仪与激光测距机的光轴平行度测量步骤类似。布置光电吊舱、反光镜、激光显色靶纸,在焦距下将光电吊舱图像中心对准靶纸十字标。打开激光测距机,在靶纸上记录光斑中心位置,测量光斑中心与靶纸十字标中心的相对位置偏移量,计算光轴平行度误差。
结合工程实际,利用六自由度摇摆台为光电吊舱稳定平台施加幅值为2°,频率为1 Hz的正弦激励信号,测试稳定平台的稳定精度。测试结果表明,稳定平台的稳定精度符合设计要求。
6 振动试验
振动试验谱图如图7所示,g为重力加速度[11]。振动试验时间为X向、Y向、Z向各20 min。试验时,试验件安装在专用夹具上,夹具刚性固定在振动台扩展台面或水平滑台台面上,前者对应Z向,后者对应X向、Y向。试验采用两点平均控制方式进行,两个控制点均位于夹具上,在试验件表面设置一个测量点。光电吊舱安装状态如图8所示。

图7 振动试验图谱

图8 光电吊舱安装状态
以垂向为例,振动试验前,根据振动试验图谱,将控制曲线输入振动试验台控制软件,形成的振动试验曲线如图9所示。由曲线数据可以看出,施加的振动量经过减振装置后,位于测量点的输出振动量有明显衰减,减振装置隔振效果明显。
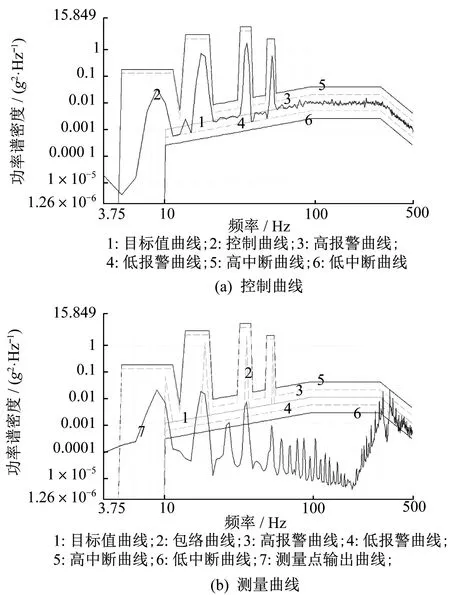
图9 振动试验曲线
7 电磁兼容试验
依据标准GJB 151B—2013《军用设备和分系统 电磁发射和敏感度要求与测量》的相关规定,对光电吊舱进行CE102电源线传导发射试验和CS101电源线传导敏感度试验[12]。
7.1 CE102电源线传导发射试验
光电吊舱按照标准进行安装、布置,在典型工作状态下预热达到稳定后开始试验。试验输出曲线如图10所示。由图10可以看出,电源线中性线、相线的传导发射均在限值以下,光电吊舱满足CE102 10 kHz~10 MHz电源线传导发射试验的指标要求。

图10 电源线传导发射试验输出曲线
7.2 CS101电源线传导敏感度试验
光电吊舱按照标准进行安装、布置,在典型工作状态下预热达到稳定后开始试验。根据限值126 dBμV进行注入,试验过程中对光电吊舱的工作状态进行观测。在试验过程中及试验后,未出现异常状态,光电吊舱均能正常运行。电源线传导敏感度试验曲线如图11所示,试验现场如图12所示。

图11 电源线传导敏感度试验曲线

图12 电源线传导敏感度试验现场
8 结束语
针对无人机远距离目标监测任务需求,设计了一种光电吊舱稳定平台。光电吊舱通过伺服系统控制,实现对目标区域的视频稳定成像、存储、测距等功能。光电吊舱稳定平台通过光轴平行性测试、稳定精度测试、振动试验、电磁兼容试验,均满足设计要求。光电吊舱已经得到实际工程应用,为类似稳定平台的设计提供了参考。
猜你喜欢
中国新技术新产品(2023年1期)2023-04-07 02:25:26
科学大观园(2022年14期)2022-07-17 03:54:41
幼儿园(2021年12期)2021-11-06 05:10:20
家庭影院技术(2020年11期)2020-12-28 01:22:38
家庭影院技术(2018年9期)2018-11-02 05:31:30
航空模型(2016年10期)2017-05-09 06:30:58
中国修辞(2016年0期)2016-03-20 05:54:32
幼儿100(2016年28期)2016-02-28 21:26:17
火控雷达技术(2016年2期)2016-02-06 02:29:00
电脑迷(2015年11期)2015-04-29 00:44:03
