
Building mmWave on the Evolving C-V2X:mmWave NR-V2X
2024-02-29 10:34ShanzhiChenXinxinHeRuiZhaoJinlingHuXinZhang
China Communications 2024年1期
Shanzhi Chen ,Xinxin He ,Rui Zhao ,Jinling Hu ,Xin Zhang
1 China Information and Communication Technology Group Co.,Ltd.(CICT),the State Key Laboratory of Wireless Mobile Communications,Beijing 100083,China
2 Beijing Laboratory of Advanced Information Networks,Beijing Key Laboratory of Network System Architecture and Convergence,Beijing University of Posts and Telecommunications,Beijing 100876,China
3 CICT Connected and Intelligent Technologies Co.,Ltd,China Academy of Telecommunication Technology,Beijing 100191,China
4 CICT Mobile Communications Technology Co.Ltd.
Abstract: Since the evolving standardization of cellular V2X(C-V2X)technologies is continuously developed by 3GPP,research on new radio (NR-V2X) has been on schedule by academic and industries.Though millimeter wave (mmWave) frequency band is supposed to provide large transmission bandwidth,yet the development of mmWave band in NR-V2X is still in preliminary stage.In this article,a comprehensive discussion of mmWave NR-V2X is given covering trends,standardization landscape,and enabling technologies,aiming at tackling the challenge of channel modeling,directional channel access,beamforming and blockage management.The vision of mmWave NR-V2X is to fully support the development of automated driving,holographic control display and improved in-car infotainment for the future.
Keywords: C-V2X;enabling technologies;mmWave NR-V2X
I.INTRODUCTION
The Internet of Vehicles is regarded as one of the important fields in the deep integration of informatization and industrialization,which has great industrial potential and application demand.Equipped with advanced sensing systems,control and decision-making systems,autonomous vehicles can support vehicleto-everything(V2X)through communication network technologies to enhance vehicle intelligence and autonomous driving capabilities,and significantly improve road safety,traffic efficiency and travel experience[1,2].
The initial stage of cellular V2X (C-V2X) technologies developed by the Third Generation Partnership Project(3GPP)is an adaptation of long-term evolution (LTE) for basic road safety services of sub-6GHz V2X communications [3],in which the maximum data rate is still limited in vehicular dense and highly mobile environments [4].Then,for meeting the needs of advanced autonomous driving V2X applications,the new radio (NR)-based V2X technology is developed [5].As more and more sophisticated sensors will be incorporated into smart vehicles,including on-board radars,vision cameras and complex sensors for advanced services such as laser radars,gigabit-per-second(Gb/s)data rate will be required for autonomous driving and in-car XR.However,with limited available spectrum below 6 GHz,current technology still cannot support the required data rates.Recently,the millimeter wave technology has received extensive attention from the automotive industry and academia.Combined with higher order modulations and multiple-input multiple-output(MIMO) techniques,the rich spectrum resources of mmWave frequency band make it an important candidate for achieving ultra-high data rate [6].Compared to microwave waves,the signals transmitted on mmWave band are more easily absorbed by gases and humidity,leading to high atmospheric attenuation.The mmWave channel suffers significant path loss.Beamforming technology can adjust the amplitude and phase of signals from multiple antennas so that the final radiated signal is concentrated in one direction,which is a key enabler in overcoming this drawback [7,8].Although the highly directional antennas can increase the mmWave transmission range,the initial channel access and beamforming process may face some new challenges.For instance,the directional beams limit the sensing range,leading to sensing deafness and collision,and the frequent realtime beam training is difficult in high mobility scenario.Moreover,the mmWave links are likely to be blocked [9],when vehicles are in areas such as intersections,tunnels,merging area and on-ramps,etc.This paper tries to discuss a series of key issues on the trends,challenges and enabling technologies of mmWave NR-V2X and Beyond.
The rest of the paper is organized as follows.In the following sections,the 3GPP standardization progress of C-V2X technologies is reviewed,and the vision and requirements of mmWave frequency band are discussed.Then application scenarios and technical challenges of mmWave NR-V2X are discussed.Following that,we highlight the enabling technologies of mmWave NR-V2X development.In the final section the conclusions are given.
II.STANDARDIZATION LANDSCAPE OF C-V2X AND MOTIVATION OF MMWAVE NR-V2X
2.1 Standardization Landscape and Vision of C-V2X
C-V2X technologies have recently received increasing attention from both academic and industry field.Since 2015,3GPP,as a worldwide standardization organization,has started to carry out research and standardization of C-V2X technologies,and continuously proceeded standardization evolution of C-V2X technologies.The 3GPP standardization landscape of C-V2X technologies is provided in Figure 1.The C-V2X technologies are mainly separated into two stages as follows:
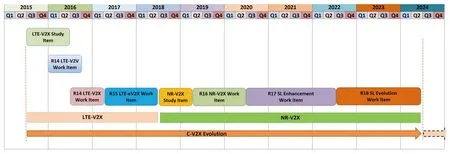
Figure 1. 3GPP standardization landscape of C-V2X technologies.
-The first stage is LTE-based V2X technology(R14,R15),named as LTE–V2X technology,which mainly focused on the periodic-oriented basic road safety services.LTE-V2X technology provides an efficient sensing and resource reservation based multi-point to multi-point channel access mechanism,and supports broadcast communication mode only.
-The second stage is NR-based V2X technology(R16,R17),named as NR-V2X,which mainly targets for meeting the needs of advanced V2X applications,e.g.,autonomous driving,platooning,advanced driving,sensor extension and etc.NR sidelink provides higher reliability,lower latency,higher data rate,and better flexibility than that in LTE-V2X.In R16,3GPP introduced high-order modulation (up to 256QAM)and multi-antenna transmission mechanism(maximum supporting 2-layer spatial multiplexing) in NR sidelink to support higher transmission rate.HARQ feedback was also introduced in sidelink to improve transmission reliability.Distributed multi-point to multi-point channel access mechanism was also further evolved based on LTE-V2X to reduce resource conflicts and improve reliability especially for aperiodic traffic in advanced V2X applications.In R17,power saving mechanism for sidelink was also introduced for supporting Vulnerable Road User(VRU)application,including the related partial sensing based channel access mechanism and sidelink Discontinuous Reception(DRX)mechanism.At the same time,inter-UE coordination mechanism was also specified in R17 to improve the reliability of sidelink transmission.
With the development and evolution of advance V2X applications,especially targeting for autonomous driving,it can observe that high data rate is an essential requirement.However,the scarcity of available spectrum for advance V2X application will be a bottleneck.In R18,3GPP also starts to study the available spectrum for NR sidelink to support higher data rate.The mmWave frequency band is a potential frequency band to provide large transmission bandwidth,e.g.,several hundred MHz or even GHz bandwidth,and attracts more interest from both academic and industry field.
2.2 Motivation and Application Scenarios of mmWave NR-V2X
The motivation of introducing mmWave in NR sidelink is to resolve the contradiction between the limited available spectrum and the high data rate requirement of advanced V2X applications.With the large-scale deployment of C-V2X technologies and rapid growth of C-V2X enabled communication devices,the potential application scenarios for advanced and future V2X applications are illustrated as follows.
-Automated driving requires accurate reconstruction of the surrounding road environment,it needs to perform higher data rate communication among different traffic participants to obtain the surrounding road information,especially for Radar,Lidar or video based sensor information.
-For future V2X applications,it requires to offer deeper and more natural human experience,such as AR/VR based display,holographic control display systems,immersive entertainment,and improved in-car infotainment.
All these advanced and future V2X applications will bring forth new communication challenges,especially requires larger available spectrum.It is well known that the available spectrum at sub-6GHz is very limited.Due to the challenged radio propagation characteristic,mmWave frequency band has not been fully explored by industry,and it can potentially provide larger amount available spectrum for the advanced and future V2X applications.However,due to the high mobility of vehicles,the radio channel of V2X communication exhibits complex and variable propagation characteristic,and topology among V2X communication nodes changes rapidly.All of these characteristics pose great technical challenges for mmWave communication in NR-V2X.
III.TECHNICAL CHALLENGES OF MMWAVE NR-V2X
The mmWave large-scale antenna array can achieve spatial multiplexing gain and compensate path loss by beamforming technology [10].However,the highly directional communication introduces challenges in highly dynamic and dense traffic environment of vehicular communications,and the mmWave link is more likely to be blocked.Specifically,the technical challenges of mmWave NR-V2X are addressed as follows:
-First,the channels exhibit some unique characteristics.MmWave ultra-wide bandwidth and massive MIMO results in frequency and.space nonstationarity,respectively [11].Meanwhile,the fast-changing channel experience the time nonstationarity,and the vehicular traffic density also has an impact on channel statistical modeling[12].Therefore,it is a challenge to design a channel model that accurately reflects the above characteristics simultaneously.
-Second,during the channel access procedure,the directional beam limits the sensing range of the vehicle transmitter and makes it unable to obtain the complete information of the neighbor node,which leads to serious directional sensing deafness and access collisions.
-Third,the spatial multiplexing gain and path loss compensation subject to complex beamforming process.The high mobility of vehicles requires frequent beam training with low delay and complexity,which makes the design of beamforming in mmWave propagation environment more difficult.
-Fourth,the mmWave links are likely to be blocked by obstacles (large vehicle,pedestrian trees,or buildings),resulting in signaling and packet transmission outage of transmission.Meanwhile,a large number of obstacles make mmWave links unavailable.
IV.ENABLING TECHNOLOGIES OF MMWAVE NR-V2X
4.1 mmWave NR-V2V Three-dimensional(3D)Channel Modeling
In the research of mmWave MIMO channel modeling,the parameters are mostly obtained by ray tracing or empirical measurement.Due to poor diffraction capability and few scattering paths compared with microwave frequency band,the mmWave channels are sparse in the angular domain,which means that there are only a few scattering clusters.Therefore,the mmWave channel can be described with standard multipath cluster models,i.e.,the extended Saleh-Valenzuela (SV) geometric channel model [13,14].IEEE 802.15.3c and IEEE 802.11ad channel models are mainly for 60GHz indoor channel modeling.They are both SV-based cluster models,but they are SISO models,which cannot be directly used for MIMO channel modeling.In the other way,3GPP TR 38.900 and 3GPP TR 38.901 adopt ray-based channel models to support MIMO channel modeling in the 6-100GHz and 0.1-100GHz bands,respectively.These spatial channel models have geometric structure,including angle,multipath,Doppler shift,delay and other parameters,but are suitable for indoor or low-speed mobile cellular network scenarios.
In cellular communications,since the base station is fixed and elevated,there are fewer scatters nearby,and they are stationary or moving relatively slowly(the distance between the base station and the user is between 10m and 10km) [15].Therefore,for the mmWave MIMO channel modeling in NR-V2I scenario,the Saleh-Valenzuela model is also suitable,similar to the traditional MIMO mmWave channel modeling.Different form the characteristics of conventional cellular channels or V2I channels,the Tx,Rx and some of the effective scatters may move at high speed in the V2V scenarios,resulting in severe Doppler shift.Since variable types of Doppler spectra for different delays may be experienced,the V2V channel typically experiences the time nonstationarity.Moreover,the LoS component generally exists because of the short distance between communicating vehicles.In addition,the mmWave communication has high delay resolution and frequency nonstationarity,and the application of massive MIMO further leads to spatial non-stationarity.
As a result,the mmWave NR-V2V channels exhibit the three-dimensional (3D) non-stationarity in frequency,time,and space domains.However,most of the vehicular channel models capture non-stationarity either in an individual domain or in a two-dimensional domain.Up to now,the modeling of mmWave NRV2V channel that can simultaneously capture the 3D space-time-frequency non-stationarity is in the very primary stage,and the impact of vehicular traffic density needs to be further explored.
4.2 mmWave NR-V2X Distributed Directional Channel Access Assisted by Sub-6GHz
The mmWave directional channel access in vehicular direct communication mode is challenging because the directional narrow beam limits the sensing range and efficiency of the transmitters,which leads to serious access deafness and resource conflicts especially in the direct communication mode.
The existing mmWave channel access protocols mainly include IEEE 802.11ad [16] and IEEE 802.15.3c [17],where contention-based distributed mode and centralized scheduling mode are both supported.Specifically,the directional channel access scheme using carrier sense multiple access with collision avoidance(CSMA/CA)is employed in the distributed mode.The 802.11ad MAC for V2V communications is evaluated in [18].This study has shown that beamforming and scheduling management generate latency up to 250ms when a vehicle transmit data to neighbor vehicles in mmWave V2V communications.A clustering protocol is utilized in IEEE 802.11ay that supports multi-beam simultaneous communication to improve spatial sharing and mitigate interference by scheduling transmissions from different Personal Basic Service Set (PBSS) networks during non-overlapping time periods.The circular directional transmission of the Request To Send (RTS) control packet protocol [19] is only applicable to indoor or low-speed mobile scenarios.They may cause serious access delay in high mobility vehicle networks.Especially in high-density scenarios,since the directional beam limits the sensing range of the vehicle transmitter,which causes severe directional sensing deafness and leads to serious transmission conflicts and packet loss.However,recent studies have put amount of effort into finding the optimal beam direction and radio spectrum resource allocation respectively[20–24],but both are decoupled.It is necessary to concurrently schedule for channel access and beam training.
To address the challenges of the high overhead of mmWave beam training and the directional transmission conflicts,we consider an integrated V2X direct communication network architecture operating over mmWave and sub-6 GHz frequency bands in Figure 2.It can support two sidelink access schemes for direct communications,a centralized mode and an autonomous distributed mode.Each vehicle is equipped with both mmWave and sub-6 GHz communication transceivers and massive antenna arrays.Under the centralized mode,the base station(BS)schedules the sidelink resources for mmWave beamforming and communications.Under the distributed mode,the vehicles autonomously determine the sidelink transmission resources and perform mmWave beamforming.The primary design of distributed access procedure of distributed mode is illustrated in Figure 3,and the operation also includes three stages.At first,in the directional sector sensing and beam training stage,the transmitter configures itself to listen from certain selected sector direction aided by prior information provided by sub-6 GHz channel information,and monitor the channel idle state for sector beam training.After collecting sector-based resource signals from the training directions,the receiver can select the best sector beam pairs.Then,the time-frequency resource reservation and selection can be performed at the selected sector direction broadcasted at sub-6GHz.Then,based on the results of sensing,the fine beam training is performed.Specially,the transmitter sends training signals in beams selected based on sub-6 GHz channel information.Finally,in the beam reporting and data transmission stage,the beast beam pair index will be reported to the transmitter using sub-6GHz signaling,and the transmitter sends the SCI associated with the data on the mmWave band to the receiver.The SCI information can contain the beam pair index,resource scheduling and reservation,MCS information and the beam indication.Finally,vehicles transmit data by the mmWave sidelink in the best beam pairs.
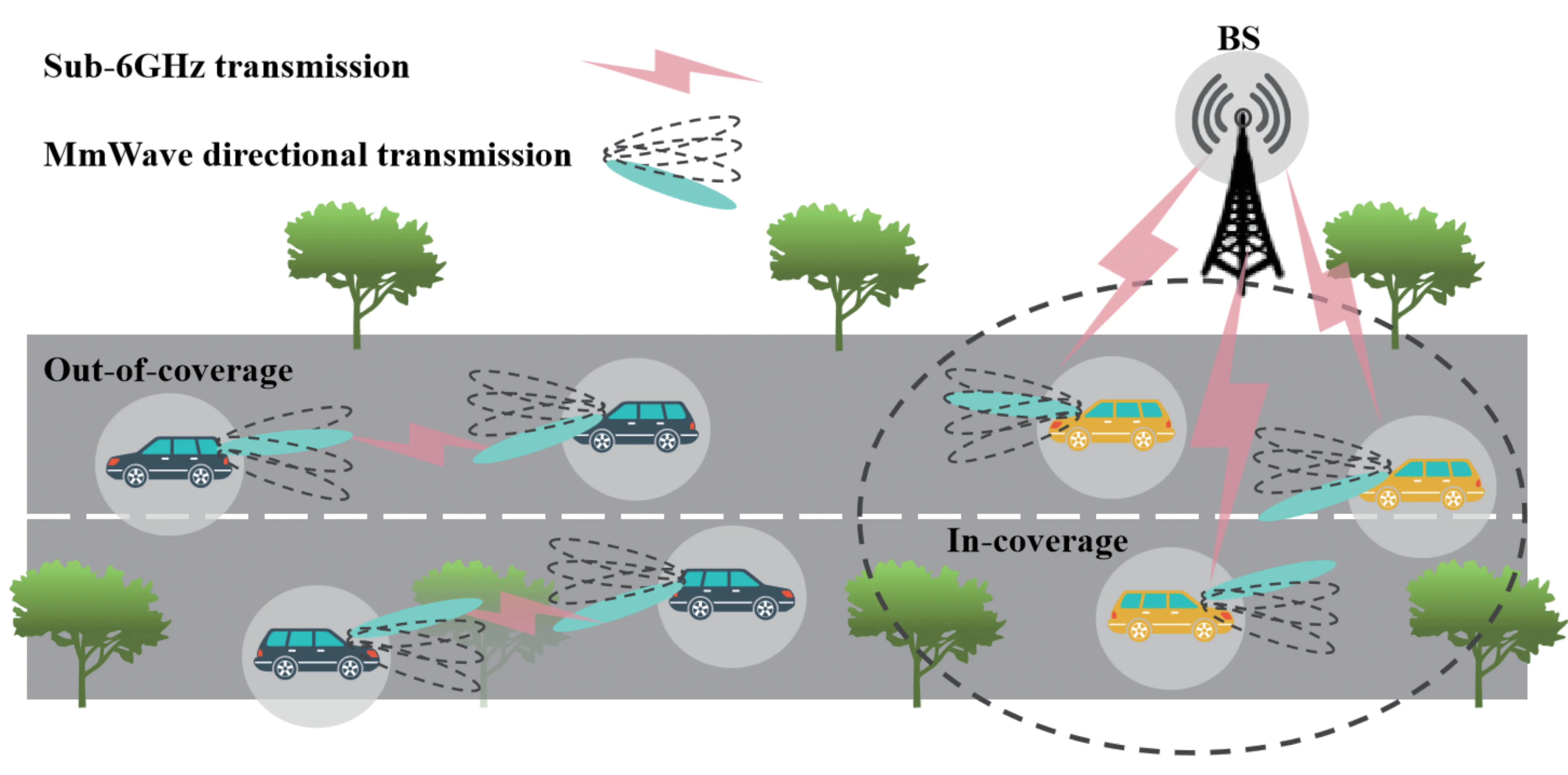
Figure 2. Network architecture operating over mmWave and sub-6 GHz frequency bands.
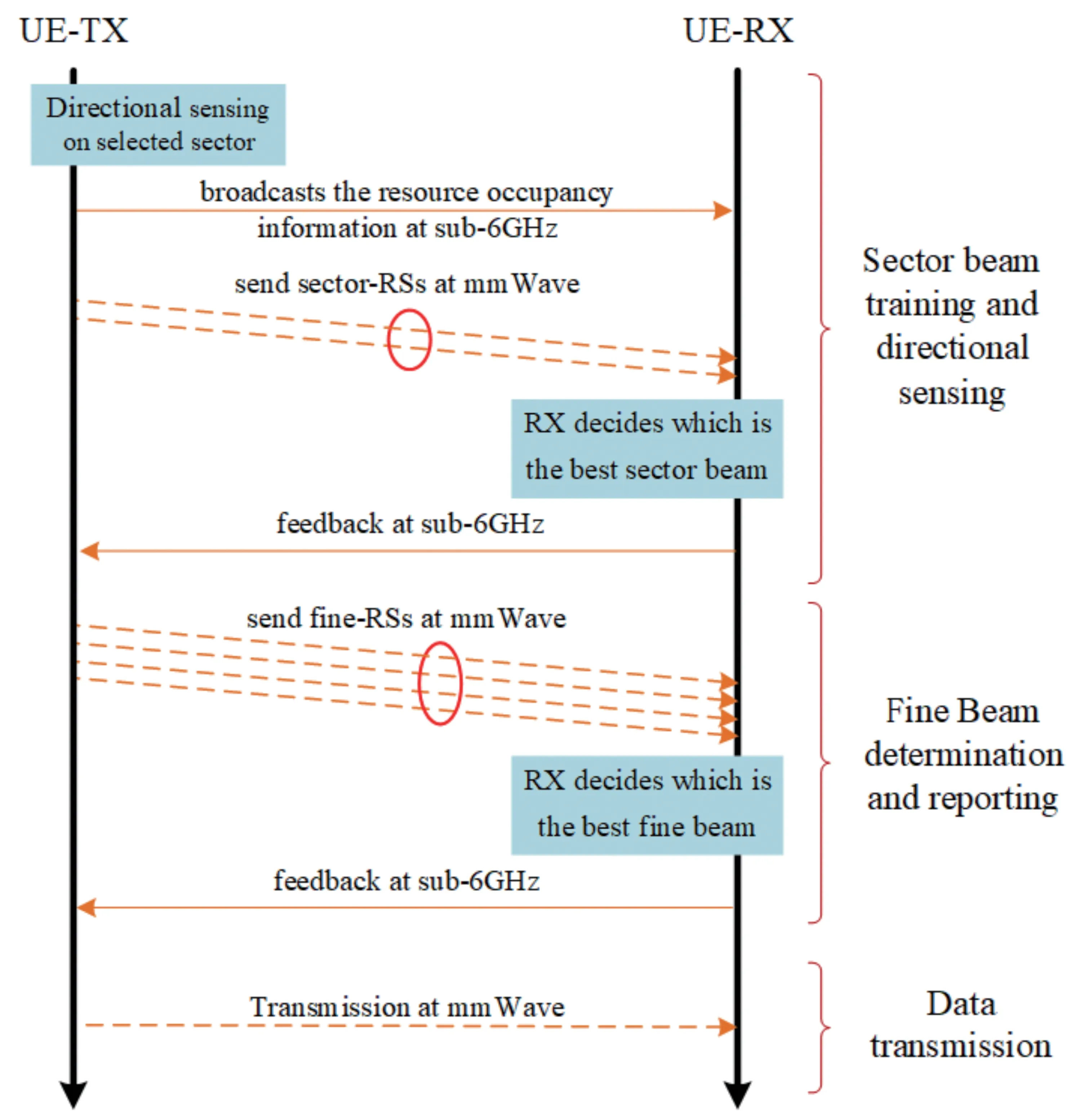
Figure 3.The distributed access procedure for V2V sidelink communications.
4.3 Out-of-Band Aided mmWave Beam Training
In order to enhance the received power of mmWave signals,beam training has been widely used to obtain the optimal transmitting and receiving beams with the maximum beamforming gain.Indeed,to guarantee the communication performance for V2X delay critical applications,it is necessary to reduce the beam training overhead.This has led to the study of beam alignment aided by prior information provided by the vehicle’s built-in sensors and multi-band equipment.As shown in Figure 4,the beam training process includes initial beam training and beam tracking.It should be noted that the initial training phase includes the initial channel access process based on directed sensing,but there can be multiple patterns for how the sensing and beam selection processes work together.Section 5.2 and Figure 3 give a description of one of the design patterns.The following give an introduction to the two stages of research respectively,and provides some insights into the existing problems.
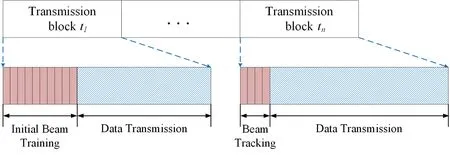
Figure 4. The transmission frame structure.
In initial beam training phase,the beam searching based training approach is popular and introduced in industrial standards.Many typical beam searching algorithms employ exhaustive search,and the beam selection decision is made until the end of a predetermined search time [25,26].Adaptive beam search algorithms can be achieved by adopting a Bayesian criterion to determine which beam set to be scanned and when to stop [27,28],however,the channel coefficients are required for the updates of the posterior probability before beam search.Since V2X communication network architecture can operate over multiple frequency bands,sub-6 GHz channel information can be used as a priori information to assist mmWave initial beam training.The spatial information between the two frequency bands is correlated and has been verified by experimental measurements [29].In order to reduce the mmWave beam training overhead,a new algorithmic framework in[30]was designed to estimate the candidate mmWave beam directions using the spatial information of sub-6 GHz.This codebookbased mmWave beam training algorithm depends on the estimating of spatial parameters in the sub-6 GHz band,thus its performance is sensitive to the frequency correlation between the two bands and the difference of channel discrete dimension in the angular domain.To tackle this problem,we formulate the multi-frequency coordination-based initial beam training scheme as a structed compressed sensing recovery problem.Specifically,in the training phase,the optional candidate beam space and sensing matrix can be formed by minimizing the Crame r–Rao lower bound(CRLB) of channel spatial angle parameters estimation,in which the prior angle probability distribution is determined by the spatial congruence with sub-6 GHz channel.The difference between two frequency bands is also taken into account in the estimation phase.We use the ray-tracing simulation software to create the vehicular scenario and calculated enough samples of the direction of arrival.The reliability of the sub-6 GHz signal is represented by the Person Correlation Coefficient to show the similarity of different DOAs.The matching pursuit algorithm can be supported by the sub-6 GHz signal with reliability,which picks the atom with the highest probability,similar to how the least squares problem is solved.This method can meet the high reliability requirement with only a small amount of training beam and greatly reduce the cost and delay of beam training.
In addition,the methods based on location information can greatly reduce the overhead of beam scanning.Existing studies are divided into two categories according to the type of position information by the sensors.One is to use the vehicle position information provided by the navigation system to assist communication,but vehicles need to transmit GPS messages to the RSU,or vehicles need to transmit positioning information with each other to obtain relative position information.The other is to use radar,camera and other sensor data to detect the trajectory,position and shape of the mobile terminal to assist communication.Literature[31]shows that for V2I communication systems with 64×16=1024 beam pairs,with the same accuracy as the exhaustive search method,the search space can be reduced to 475 beam pairs by using GPS positioning information,and can be further reduced to 32 beam pairs by using radar echo signal detection.Nonetheless,since the beam is steered accordingly to the estimated position by the sensors,the positioning error may lead to outage interval,when the vehicle is traveling outside the beam coverage.Although the radar detection error much smaller than the GPS positioning error,the length of a vehicle is not negligible.Since the vehicle should not be treated as a point target,the deviation of the angle will result from the various scattering points and antenna array.To tackle this problem,we consider a two-stage beam alignment scheme in combination with the radar side information.As shown in Figure 5,in the first stage,the radar echo signal is exploited for a dynamic wide beam design,so that the entire vehicle body and as many scattering points as possible can be covered.The position of communication receiving antenna can then be inferred according to the resolved scatters.In the second stage,the narrow beam for communication aligns the receiving antenna based on the estimated angle of former part,yielding higher array gain and communication performance.
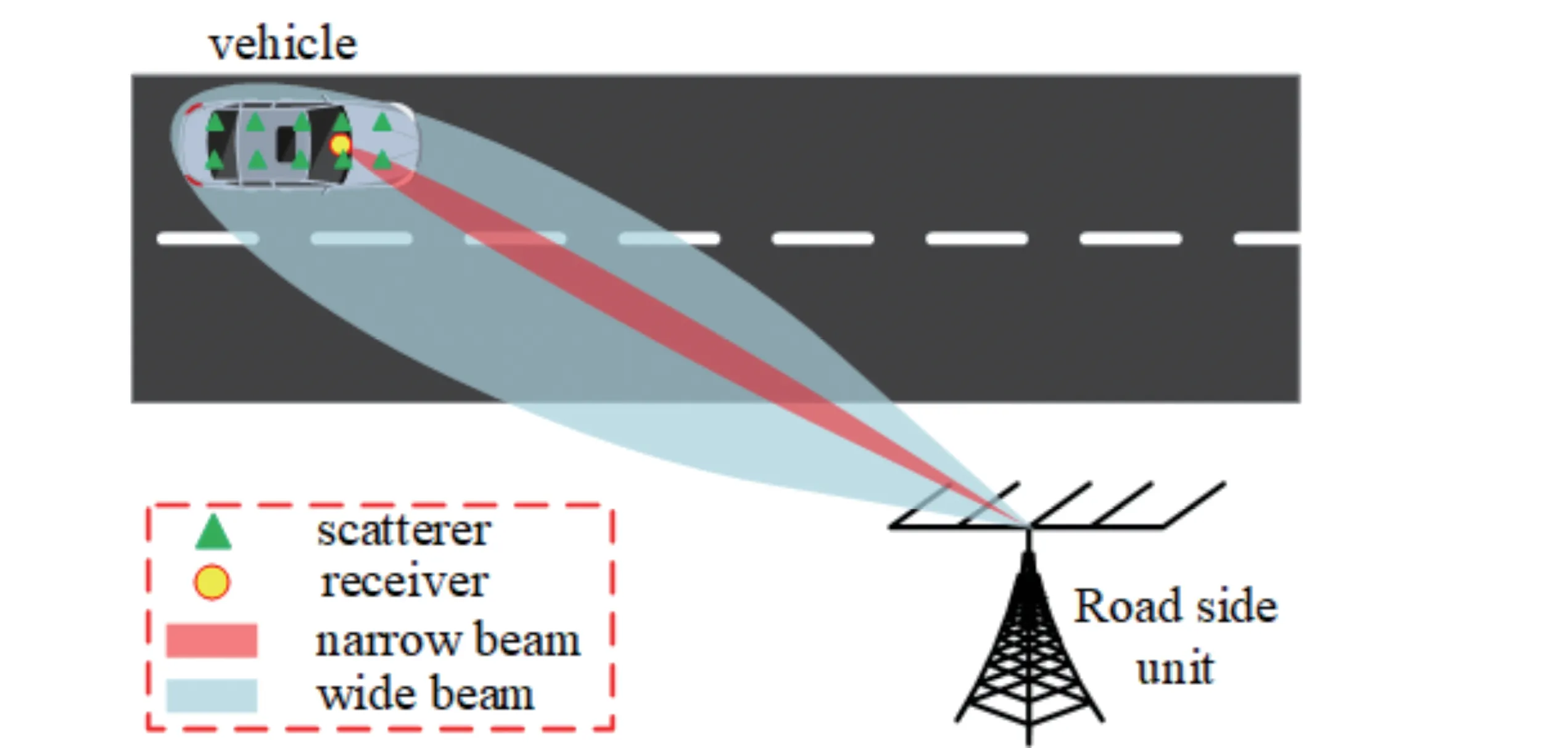
Figure 5. A two-stage radar aided beam alignment scheme.
4.4 Sensing-Assisted Beam Tracking
After the initial access is completed through beam training,the communication link is established.In order to maintain the communication quality,both the transmitter and receiver need to keep tracking the changes of the optimal beam pair.Beam tracking leverages the time correlation of the channel to construct a motion state model based on prediction and machine learning-based data processing or sensor detection to realize beam alignment by analyzing the previous channel information.The Kalman filter can forecast and estimate the system state by the input and output of the linear system[32–34].The performance of the particle filter is superior to the Kalman filter in the nonlinear situations [35].It does not depend on the steady-state evolution model,but a large number of samples are needed to accurately approximate the density probability.In addition,machine learning exploits the temporal correlation of channels through historical channel information to achieve beam tracking[36].Nonetheless,in each beam tracking cycle,it is still necessary to feedback the optimal beam index.
The coordination gain of the above radar assisted beam training scheme is achieved by reducing the training overheads,but at the cost of additional radar hardware,namely the loss of integration gain.To address these issues,the Integrated Sensing and Communications (ISAC) signals are used in V2I beam tracking,which do not require dedicated sensors and thus achieve integration and coordination gains[37–39].In ISAC V2X scenarios,the mmWave channel is typically complicated and dynamic.The beam tracking algorithm presents difficulties in nonlinear environments.The deep learning approach must obtain training data again as the scenario changes,which often adds a significant amount of overhead [40,41].In view of the above problems,we consider an interactive learning design that combines ISAC communication domain knowledge with deep reinforcement learning in dynamic vehicular scenarios.
As shown in Figure 6,after the antennas mounted on the vehicle collect the ISAC signal,the base station receives an echo reflected by the vehicle body.Beam space can be used to represent the channel,which makes signal processing easier.The vehicle sends uplink pilots in accordance with the received signal,and the base station processes the uplink pilots and echo signal to carry out beam tracking.The major objective is to obtain a policy that can decide on an action based on the present state in order to implement beam tracking,in which the beam index,azimuth angle,precoding vector,and beamforming matrix can be developed for the action space.The action design should show the variety of the communication environment,fortunately,the echo signal can easily and quickly reflect variational environment.The beam index amplitude vector of the received signal can be used to construct the resulting state.Furthermore,it is a more reasonable strategy to create a high dimensional state that considers both communication channel information and vehicle motion state.In the part of reward design,combining the two different types of performance metrics is challenging,among them signal-tonoise ratio,reachable rate,throughput and overhead can be used as the performance metric of communication module,and the accuracy of perception module estimation can be used as the sensing performance metric.
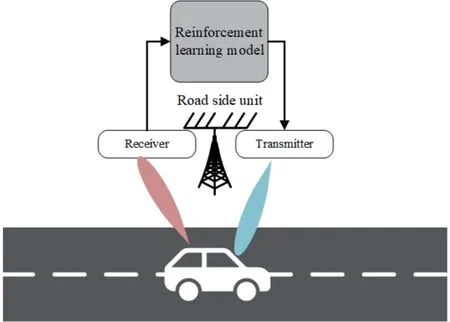
Figure 6. Interactive learning based ISAC beam tracking.
4.5 Interference Analysis and Management
The coverage of radar and wireless communication systems in the mmWave band can provide benefits for both applications.However,dual-use systems must consider four types of interference: radarto-radar (R2R),communication-to-communication(C2C),communication-to-radar (C2R),and radar-tocommunication(R2C).
Considering the sidelink communication between the terminals in Figure 7,the vehicle will typically receive and decode the sidelink control information sent by others in the network to sense for ongoing transmission,and then exclude any other reservations previously made to prevent the transmission from colliding.Assuming that Tx2 directionally detects the information sent by Tx1.In Figure7(a),the sensing Tx2 is located behind the Tx1-Rx1 link,so that Tx2 cannot sense the directional transmission of Tx1 no matter what direction it detects.In Figure7(b),a new Tx2-Rx2 transmission can interfere with Tx1-Rx1.As shown in Figure7(c),the two front-end radars of the two vehicles illuminate each other’s field of view (FoV),thus LoS and reflection interfering forming mutual R2R interference,mainly resulting in an increase of the effective noise floor or false alarms(ghost targets)[42].It can be concluded that R2R interference is due to the collision of radar operating bands used by vehicles running in opposite directions,and the interfering radar will produce ghost targets,causing false alarm and noise,thus reducing the target detection performance.In Figure7(d),the back-end radar of Tx3 sends communication data to Tx2 and receives confirmation,while the front-end radar of Tx1 carries out radar perception at the same time,causing C2R interference to Tx1.For Tx2 communication data in the same scene,it is also affected by Tx1 radar,namely R2C interference.When the radar chirp is emitted,the signal will be reflected by the target in the radar FoV and then the echo will be detected by the receiver.Since the radar receiver is listening for the echo of the target,it will detect other signals whose frequency is within the bandwidth range of the receiver,thus R2C interference is formed [43,44] analyzes the interference probability and propose that interference is generated by channel reuse and seriously affects pilot design and channel estimation.
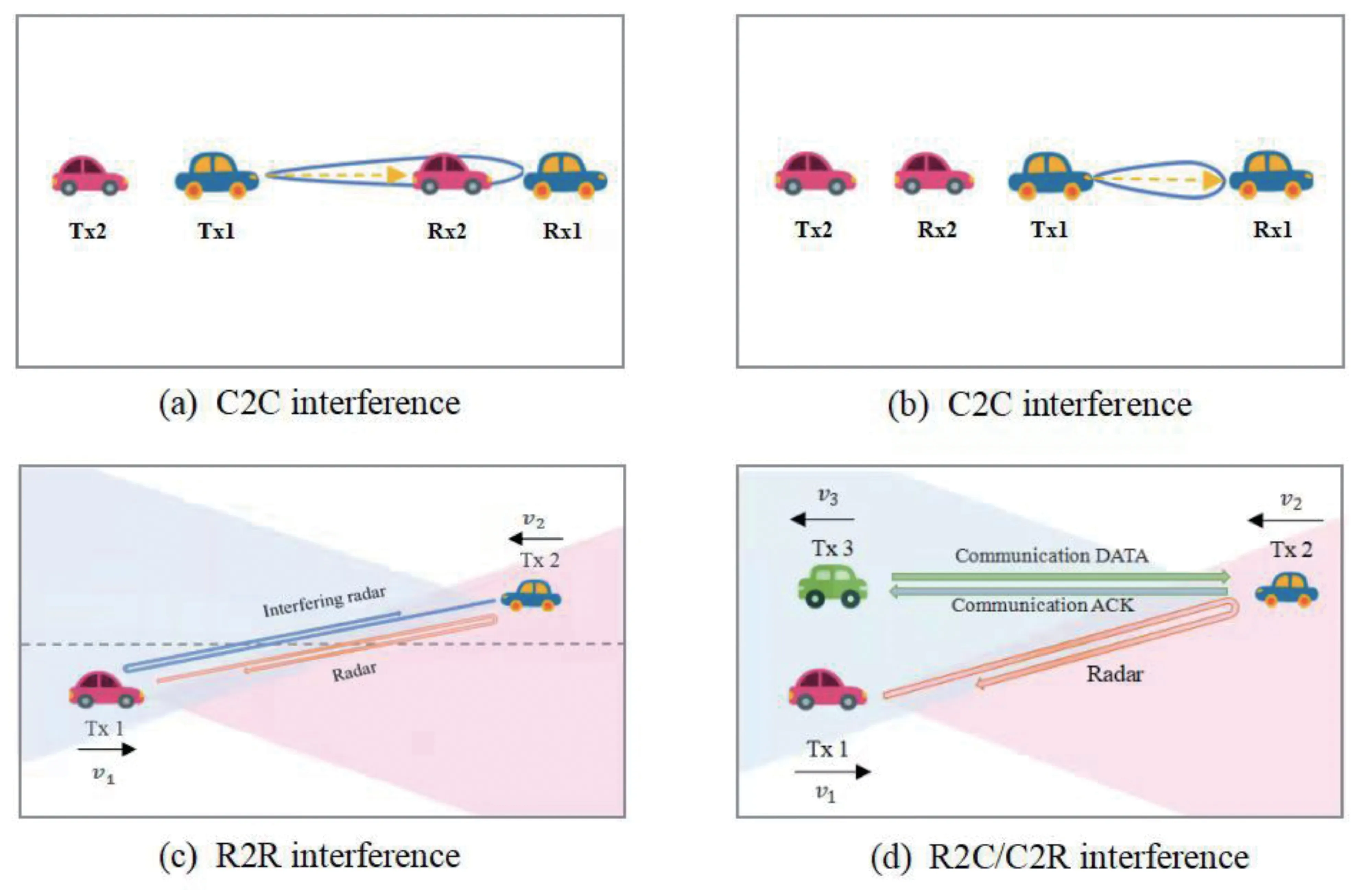
Figure 7. Example interference scenarios.
The interference mitigation methods for R2R are mainly to separate the time/frequency domain of the signal,or to use communication assisted radar to alleviate the problem of radar self-interference.To mitigate R2C/C2R interference,separate channels can be used for communication signals to avoid their interaction with radar signals,For C2C communication,the interference mitigation method can detect the channel before sending data to exclude the information retention previously carried out by other users,or detect the surrounding interfering vehicles in advance,and use the vehicle association algorithm to achieve lowlatency content dissemination.
4.6 Blocking Management Based on RIS
As a quasi-passive solution to the mmWave blocking problem,RIS has the characteristics of low cost,small volume,and low energy consumption.RIS consists of a large number of passive reflection/refraction units.Each unit can independently regulate electromagnetic waves,form passive beamforming,and obtain beamforming gain to compensate the loss of mmWave in the propagation environment,while reducing the interference between different users.In addition,RIS can also alleviate the Doppler effect caused by the high-speed movement of vehicles,and assist in perceiving the environment and pedestrian detection.
As shown in Figure 8,RIS is deployed in areas where vehicles are easily obscured,such as intersections (Figure8(a)),tunnels (Figure8(b)),merging areas (Figure8(c)),on-ramps Unmanned aerial vehicles(UAVs)Figure8(d))[45,46],etc.RIS can be used to create virtual LOS paths to ensure uninterrupted communication and positioning between vehicles or between vehicles and base stations in the shaded area.In addition,RIS is expected to reduce the rapid fluctuation of the received signal strength caused by vehicle movement.By dynamically adjusting the reflection coefficient of RIS,the reflection path signal is used to compensate the multipath fading caused by Doppler expansion in direct path signals,so as to reduce the problem of rapid amplitude fluctuation of the received signal caused by multipath fading,so that the complex envelope of the received signal has a relatively constant amplitude.
The gain of RIS depends on the integrity of the channel information.In order to obtain the optimal gain,it is necessary to obtain complete channel information.During the high-speed movement of the vehicle,the channel is in a fast-changing process,and how to obtain relatively complete channel information is an important challenge.In order to obtain the optimal gain,relatively complete channel state information is required.Due to the rapid change of the channel state information during the high-speed movement of the vehicle,how to obtain complete channel information is an important challenge.
V.SIMULATIONS
In this section,the performance of the proposed distributed directional access scheme in section 4.2 and the sensing assisted beam tracking in section 4.4 are evaluated.The sidelink communication simulation platform is developed based on the open-source simulator WiLabV2Xsim with Mode 2 of 5G V2X [47].The directional transmissions at mmWave frequency use uniform array (ULAs) antennas,and the center frequency and bandwidth are 28GHz and 400MHz.Meanwhile,the mmWave channel mode implemented relies on the Saleh-Valenzuela channel model.For sub-6GHz,the center frequency is 5.9GHz and the bandwidth is set to 10MHz,and the WINNER+pathloss model in 3GPP [48] is employed.Main simulation parameters are summarized in Table 1.
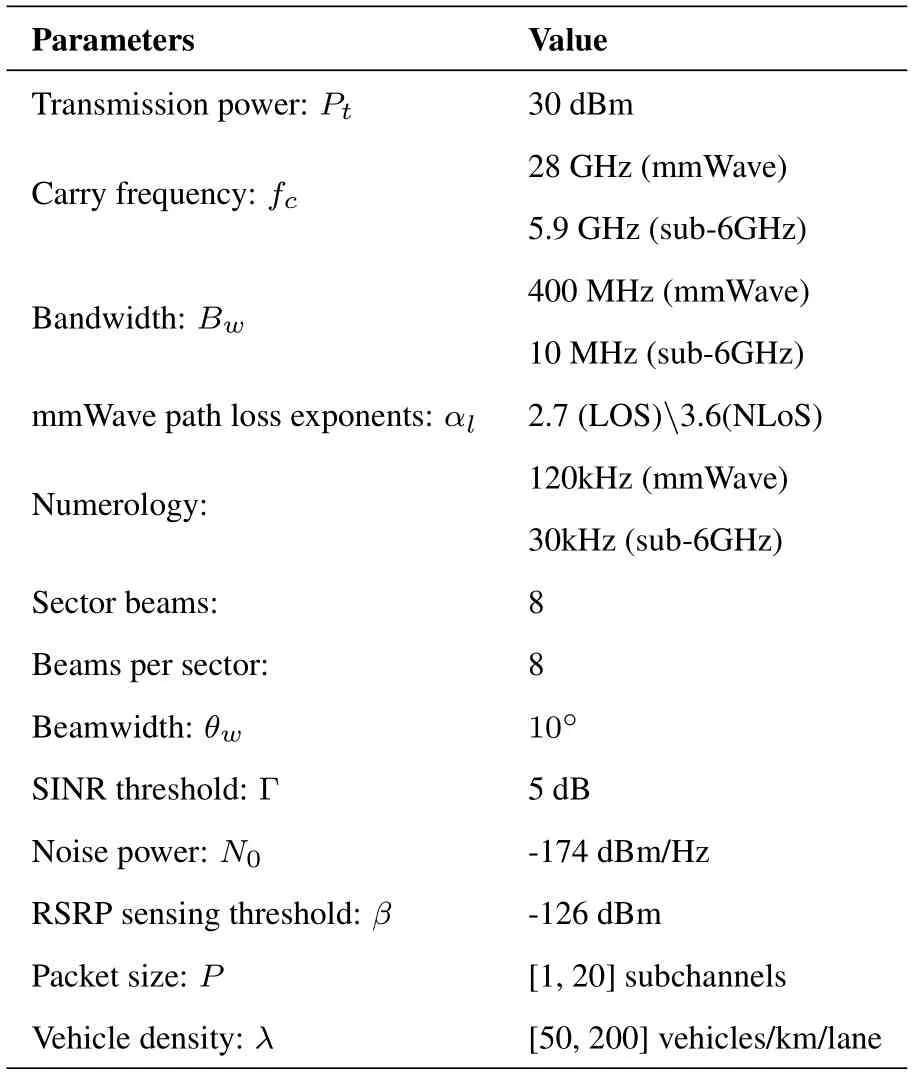
Table 1. Simulation parameters.
The performance of the proposed distributed directional access scheme is compared against the 802.11ad MAC for V2V communications[18]in terms of PRR(Packet Reception Rate) and average delay.Figure 9 shows that the proposed scheme results in a higher PRR with different number of antennas,because the transmitting vehicle performs directional sensing in sector directions and offloads some mmWave control signaling on sub-6GHz,alleviating directional deafness and contention collisions.In addition,the PRR increases with the number of antennas,due to the higher directivity of the beam with higher received power and less interference.Figure 10 illustrates the average transmission delay varying with the vehicle density.It can be seen that the proposed scheme leads to lower delay than the 802.11ad MAC.This is be-cause the transmitting vehicle only performs sector beam training in certain selected directions aided by prior information provided by sub-6 GHz channel information,and there is no need for directional sensing in the fine beam directions.
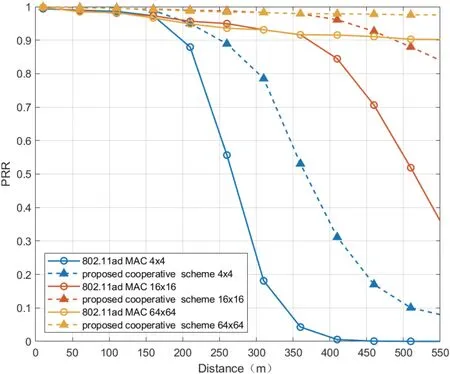
Figure 9. PRR comparison of two schemes under different antenna configurations.
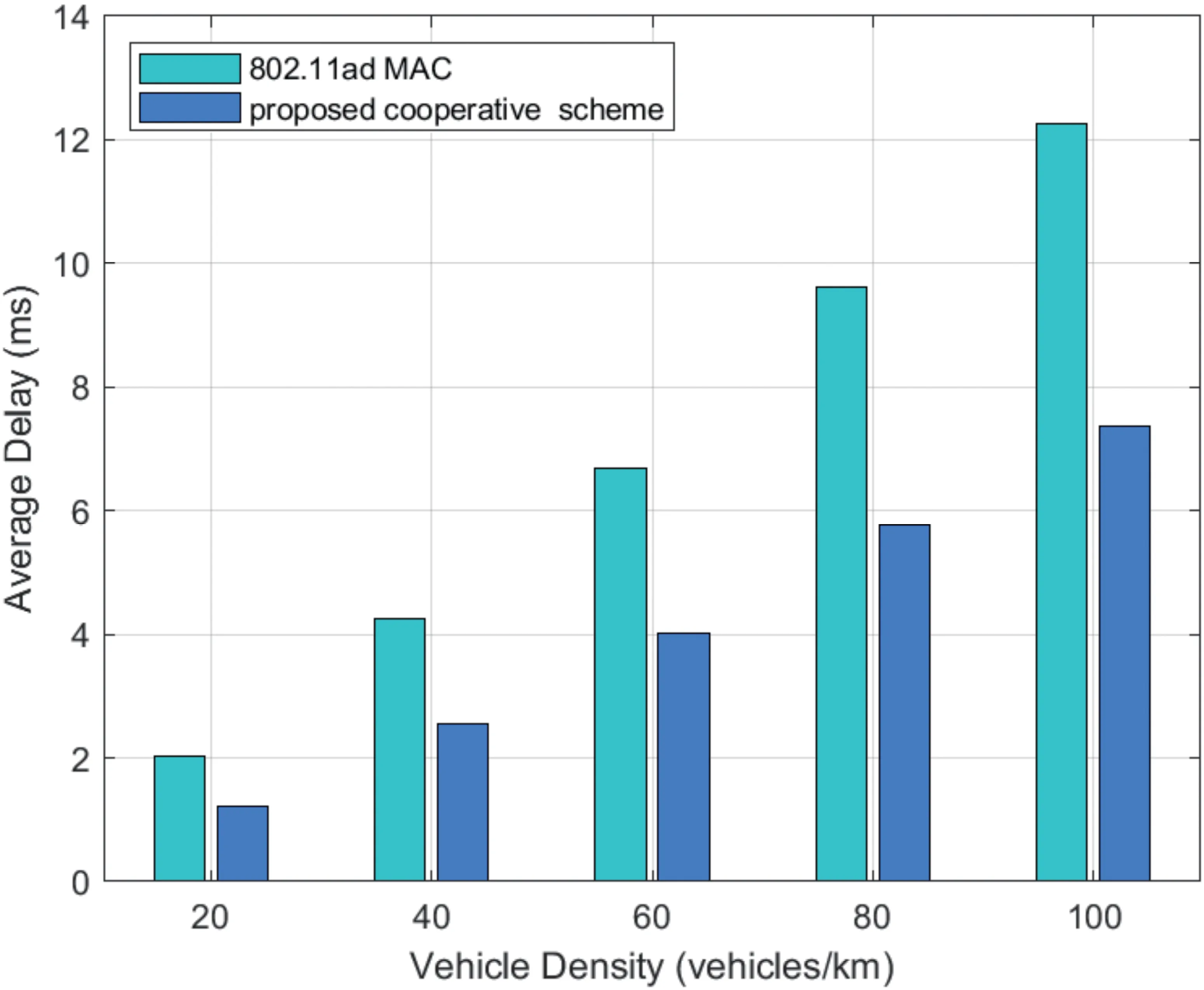
Figure 10. Average transmission delay versus vehicle density.
The beam selection success rate is utilized to measure the effectiveness of the ISAC beam tracking algorithm in V2I communications.Three tracking algorithms are compared in Figure 11.The number of times the algorithm executes is labeled as beam tracking times.Due to the precise beam training done in the initial stages,as shown in the picture,three algorithms perform well with a small number of beam tracking times.The beam tracking accuracy of EKF cannot be guaranteed as beam tracking times increase due to the stack of the noise.Since the EKF method performs poorly in non-linear scenarios,frequent beam training is necessary while tracking,which causes higher overhead and delay.The accuracy of the beam tracking algorithms based on the logit weighted-OMP(LWOMP) and reinforcement learning is maintained because they make effective use of the time correlation of the beams.To be noticed,LWOMP requires a specific quantity of training beams to assure its performance.In conclusion,the proposed ISAC beam tracking method based on reinforcement learning achieves long-term beam tracking with high accuracy and low overhead.
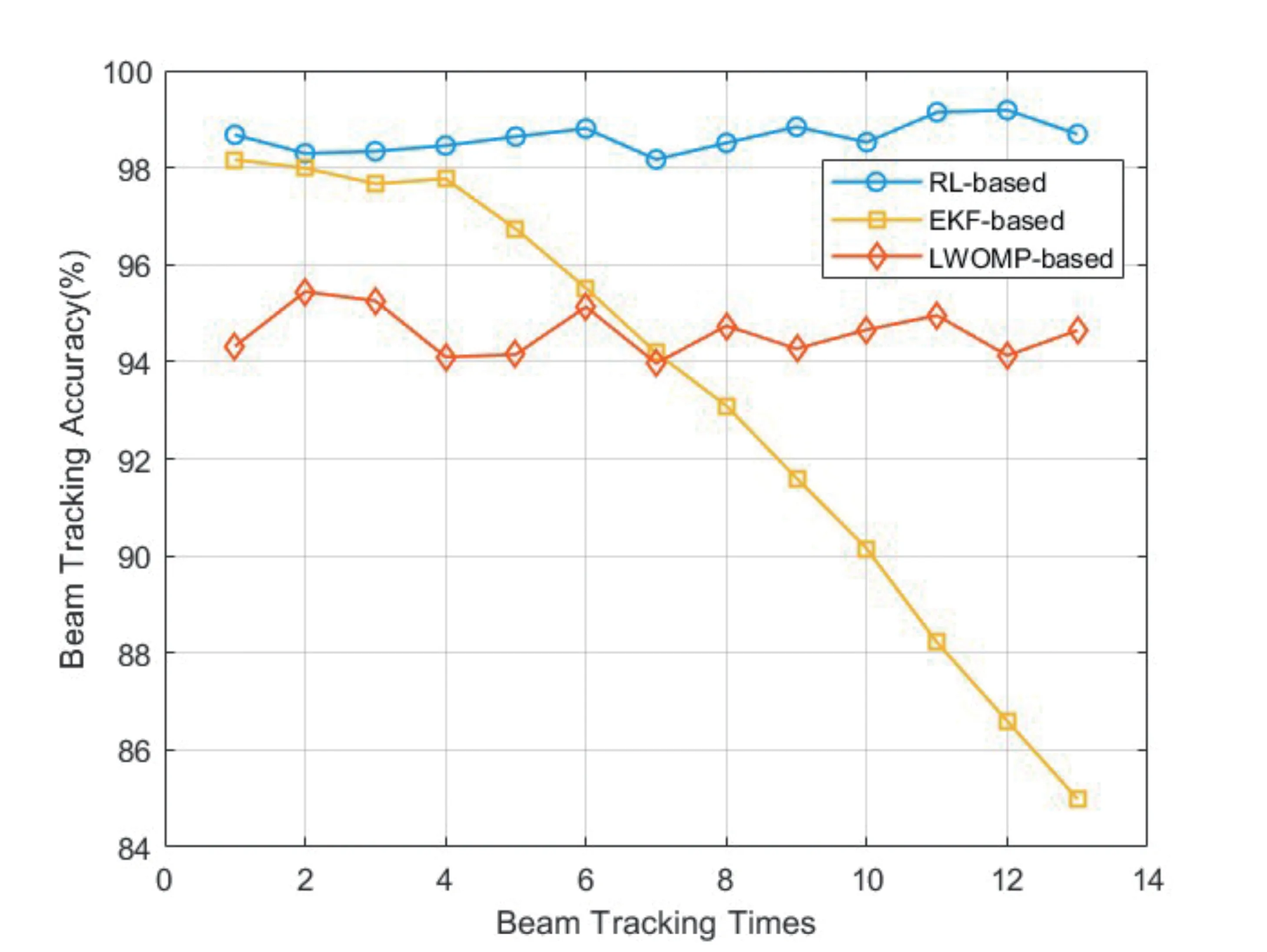
Figure 11. Beam tracking accuracy comparison of three algorithms.
VI.CONCLUSION
Following the standard optimization and commercialization of C-V2X,the research of mmWave NR-V2X has been under discussion gradually.MmWave frequency band has been considered to support high data rate communication for automated driving and future V2X applications.From the technology perspective,to address the challenges of the overhead and conflicts of the initial access,a primary design of mmWave distributed directional channel access scheme that assisted by sub-6 GHz V2X is proposed.Meanwhile,the trends of out of band aided mmWave Beam Training and tracking are discussed to reduce the beam training overhead and maintain the communication quality.Finally,the interference of active mmWave transmissions and blocking management are analyzed.
ACKNOWLEDGEMENT
The work of this paper was supported by the National Key Research and Development Program of China(2020YFB1807900)and the National Natural Science Foundation of China (61931005,62001051).Thanks to Dr.Qiubin GAO (CICT),Professor Shi Yan (Beijing University of Posts and Telecommunications)and Professor Dake Liu(Hainan University)for their contribution to revision and improvement of this paper.
- China Communications的其它文章
- Design Framework of Unsourced Multiple Access for 6G Massive IoT
- 6G New Multiple Access Technology
- OFDMA-Based Unsourced Random Access in LEO Satellite Internet of Things
- Cluster-Based Massive Access for Massive MIMO Systems
- A Joint Activity and Data Detection Scheme for Asynchronous Grant-Free Rateless Multiple Access
- The Extended Hybrid Carrier-Based Multiple Access Technology for High Mobility Scenarios