
一种辅助火灾搜救的智能车设计*
2024-02-28 05:52:08王晓鹏于家旺赵恩波杨建海赵楠楠
科技创新与生产力 2024年1期
王晓鹏,于家旺,赵恩波,杨建海,赵楠楠
(辽宁科技大学电子与信息工程学院,辽宁 鞍山 114000)
1 研究背景
在过去的几十年里,大量的高楼大厦、核工厂和化学实验室等不断出现火灾,当这些地方出现火灾时,不仅难于进行灭火,而且其中的很多危险因素都直接威胁着消防人员的生命安全[1]。本文设计了一款火灾救助智能车,不仅可以代替消防员,搜集火灾现场,减轻消防人员的负担;也可以进入楼宇进行监测,搜寻生命迹象。
近年来,随着科学技术的不断发展火灾救助智能车的研制工作也有了很大地提高。但我国的火灾救助智能车起步较晚,还存在智能化程度不够、环境处理能力弱、可靠性不强等问题。该智能车小巧,在开发时尽可能多地采用成熟技术,注意配套技术,确保使用时的可靠性与实用性,适用于更多场景。
目前的火灾救助都采用消防员进入灾区,承担监测灾区环境,寻找生命迹象等任务,这对消防员来说是十分危险的。为了减少消防员进入灾区的时间,该智能车将代替消防员,进行初次的勘测灾区环境和寻找人类生命迹象活动,从而保证消防员的生命安全。
它的主要特点是拥有自动、遥控双模式,使用简单、方便,能对发现的生命体进行简单的救助(对其周围喷洒水)。此市场并不完善,有较大的应用前景。
2 整体设计方案
2.1 功能设计
该设计是一个用于辅助消防员进行火灾探测工作的智能小车。该智能车是由STM32、OpenMV4-plus、超声波模块、人体红外感应模块、ESP8266 Wi-Fi 模块、2.4 G 无线模块、电机驱动模块、喷水装置以及其他机械结构构成。整体结构设计见图1。
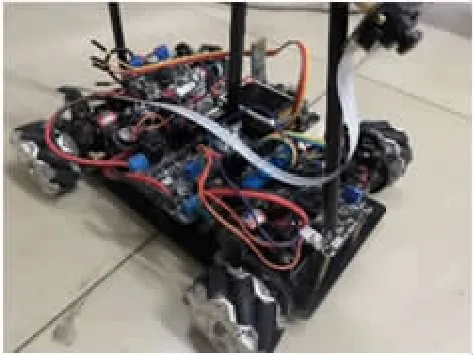
图1 智能车结构设计图
该智能车车轮采用耐火材料,以保证该智能车在进入火灾现场后可以正常地工作。该智能车有两种模式,一种是自动模式,另一种是遥控模式。在自动模式下,该车始终贴近右墙壁前进,同时用摄像头记录现场实时信息,并反馈给操作人员。当该智能车接收到由人体产生的红外信号后,对该点进行标记,规划到达的最短路线,同时将该点坐标发送给操作人员,解决了消防员花费大量时间监测,并进行生命信号寻找的过程,整个过程更加的快捷、高效。该智能车在到达被困人员附近后,自动对其周围的火域进行喷水,从而保证人身安全。在自动前进过程中,由避障模块控制智能车进行自动避障,以保证车辆整体的安全。遥控模式下,操作人员利用摄像头观察周围的地形、局势,并通过无线通信模块控制小车前进,控制喷水器喷水。智能车工作流程见图2。
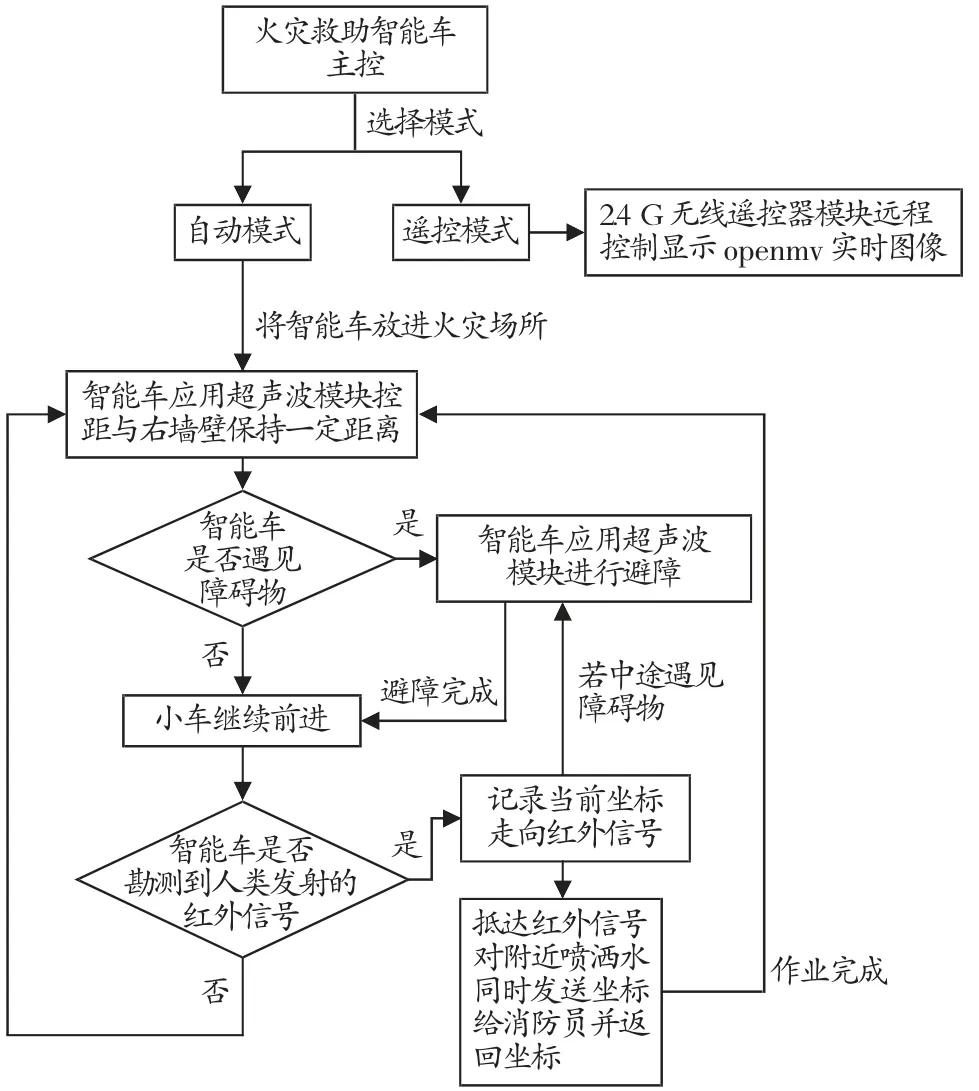
图2 智能车工作流程图
2.2 系统设计
该智能车以STM32 为主控,车身通体使用铝合金,在电池以及模块表面涂抹阻燃剂。在进入火灾区域后,整体结构依靠超声波模块对右墙壁进行校准,使其与右墙壁始终保持一定距离,智能车将扫描火灾区域的大致形状,通过ESP8266 Wi-Fi 模块将火灾内部环境信息发送至手机端,并由STM32依照火灾形状信息进行路径规划。智能车在正常行驶过程中,依靠车头上的三个超声波模块进行避障处理。由红外模块来接收人体的红外信号,以达到快速寻找火灾受困人员的目的。
智能车通过OpenMV 摄像头探测火焰大概位置,然后旋转云台,通过红外检测模块进一步确认火焰位置,再结合烟雾传感器确认火焰的发生,旋转二维云台,将喷水装置对准火源,进行火灾的简单处理。在处理复杂火灾情况时,可使用2.4 G 模块实现对智能车进行远程遥控及喷水等操作。
3 实现方案与核心算法
3.1 详细设计
该智能车选用四轮麦克纳姆轮结构,能够全方向移动,可以灵活地在火灾区域内部活动。车身搭载的超声波模块能够进行避障,人体红外传感器模块能对受困人员进行小范围的搜寻,摄像头选择OpenMV4plus,它是一款开源,低成本的机器视觉模块[2]。该摄像头能提供充足的存储空间和带宽来运行复杂的算法和存储大量的图像数据,并且支持多种机器视觉算法和深度学习模型。通信模块采用ESP8266,能将摄像头模块的实时数据反馈到手机上。无线遥控采用2.4 G 模块,连接更加稳定。
3.2 核心算法
3.2.1 PID 控制算法
在人工智能车领域,PID 算法控制以其处理速率快,鲁棒性好,无用干扰误差信号影响较小,数据整定较为方便等特点而被广泛应用[3]。传统的增量式PID 算法公式为
增量式PID 应用在智能车上的流程见图3。
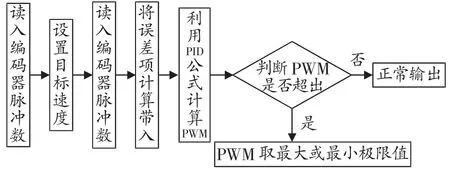
图3 智能车增量式PID 流程图
在整个算式的过程中不需要对计算量进行累加,输出为系统控制量之间的增量,因此当计算机系统出现故障时,影响范围较小,执行程序的结构本身具有记忆的功能,可以继续保持原有的位置不变,并不会过多影响整个智能车系统的正常运转。由于记忆系统相关的控制量是增量式PID 所必需的工作,所以对于一些自身不带记忆装置的系统时,就只能采用位置式PID 进行调节与控制。在手动和自动之间进行切换时,对计算机系统产生的冲击较小,可实现计算机在两者之间的无扰动切换。
3.2.2 实时目标检测
YOLO-V2 是一种用于实时目标检测的卷积神经网络,它的构架分为特征提取网络、特征融合网络、检测网络3 个部分。在使用深度卷积网络提取目标图像特征时,卷积网络深度和宽度决定网络性能,与浅层网络相比,深层网络特征提取效果更佳[4]。但由于网络过深,导致误差梯度在反向传播时不能有效指导前层网络权重的更新方向,致使网络训练时间加长和拟合能力变弱。将残差网络结构加入基于YOLO-V2 的特征提取网络中,并通过火焰识别试验数据验证改进特征提取网络的性能。实验结果表明,在原有的特征提取网络加入残差结构能够有效地提高深度卷积网络模型的性能[5]。
智能车采用OpenMV4plus 对火焰进行识别,使用的是云端的edge impulse 网站来进行模型的训练及自动生成。只需要将火焰数据集上传即可获得OpenMV4plus 可使用的训练模型,进行目标识别。模型训练见图4。
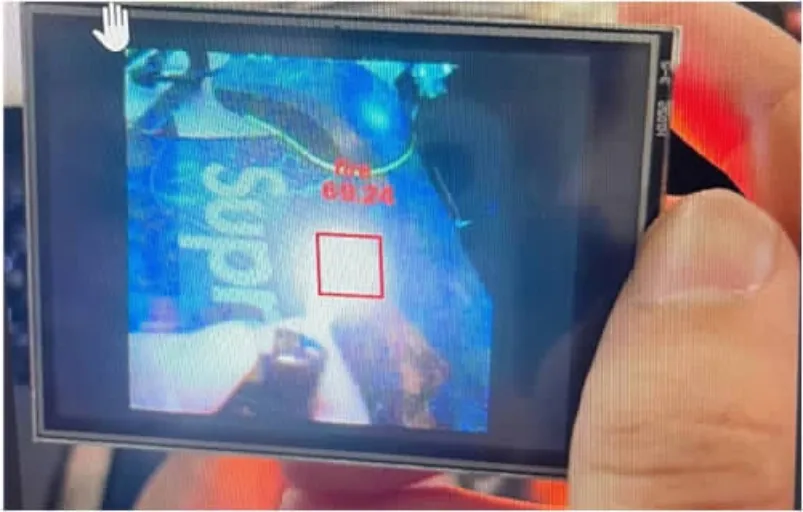
图4 模型训练图片
3.2.3 路径规划
该算法依靠MATLAB 函数对区域内部进行路径规划。该函数接受父节点、网格的行数和列数、障碍物和关闭列表作为输入。它首先定义了一个多边形障碍区域(深色为障碍墙壁),设置一个智能车工作的起点和受困人员所在的区域,仿真演示见图5。然后计算可能的子节点,对于每个子节点,检查该点是否在多边形内且不在障碍物列表中。如果满足这些条件,则将其添加到子节点列表中。最后,排除已经存在于关闭列表中的节点。
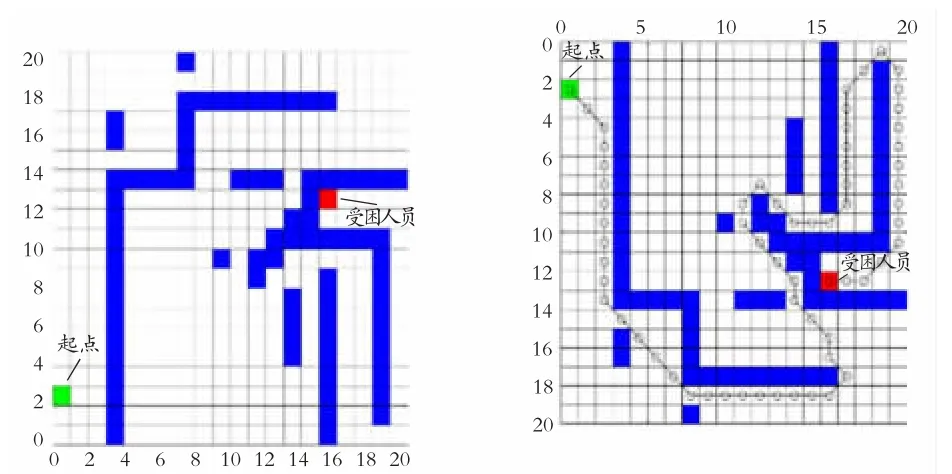
图5 障碍区域设计及其路径规划MATLAB 仿真演示
4 结果测试
一是火焰识别率高达80%,仍在优化算法。二是将小车放在发车点,通过ESP8266 模块传回的路径数据见图6。
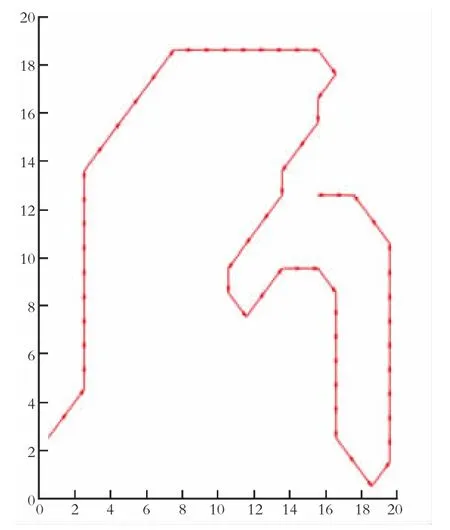
图6 手机上的路径数据
5 结束语
本文提出了能够辅助火灾搜救的智能车,使用增量式PID 算法控制车辆前进;使用YOLO-V2 神经网络去寻找火源位置,对火源进行喷水处理;使用A-star 算法规划路径,使用ESP8266 模块将室内MATLAB 仿真图发送至手机。该智能车在未来可应用于辅助救援,在消防安全方面有一定的参考价值。
猜你喜欢
中国交通信息化(2022年9期)2022-10-28 06:14:40
汽车工程师(2021年12期)2022-01-18 06:02:43
电子制作(2018年19期)2018-11-14 02:37:08
自动化学报(2017年11期)2017-04-04 02:52:58
小樱桃·童年阅读(2015年9期)2015-11-26 14:30:45
小樱桃·童年阅读(2015年6期)2015-06-26 14:18:51
小樱桃·童年阅读(2015年5期)2015-06-02 14:39:47
汽车维修与保养(2015年8期)2015-04-17 03:32:59
噪声与振动控制(2015年4期)2015-01-01 07:08:21
轴承(2010年2期)2010-07-28 02:26:12
