
惯性陀螺仪在地下管线测量中的应用研究
2024-02-28 05:52:06冯平
科技创新与生产力 2024年1期
冯 平
(三和数码测绘地理信息技术有限公司,甘肃 天水 741000)
在我国城市化进程中,地下管线作为地下空间的重要组成部分,关系到城市居民的生产和生活,是城市生存和发展的血脉,其重要性不言而喻。当前,在城市中,由于涉及的行政单位和权属单位较多,数据信息质量参差不齐,数据信息缺失,测量手段落后,数据点稀少,一些地区还没有形成一个完整的地下管线信息系统。在一些比较先进的城市中,已经基本上构建起地下管线信息系统,并与管线竣工测量或详查等项目相联系,基本上已经实现对地下管路数据库的实时更新,并且整体运行状况良好。大多数城市因为种种因素,地下管线数据陈旧不完整,精度不高,在此状况下,即便是建设管线信息系统也无法充分利用,还经常会因为无法精确定位管线的具体方位而引发管线安全问题,对城市建设、管理与发展造成极大影响。
1 惯性陀螺仪的原理
当一个转动的物体没有受到任何外力的作用时,它的转动轴线指向的方向就不会发生变化。因此,人类利用这种原理明确自身所处位置,从而研制出惯性陀螺仪。当陀螺运转的时候,需要施加外力,才能让陀螺高速转动,通常情况下,速度可以达到每分钟数十万转,而且运转能持续较长时间。通过各种方式,陀螺仪可以读出各坐标系数,并向控制系统输出相应的信息。惯导陀螺仪综合运用重力场与计算机矢量运算等多个领域的技术,其基本原则是以陀螺仪定位与惯导为基础。在测量与定位时,牵引机利用绳索等工具将惯导定位仪拖动到管线上,根据惯导与多源数据融合的方法,得到管线的坐标。利用GPS 等技术获取管线的起始、结束位置,通过对起始点的定位,将测量到的定位数据转化为空间坐标,即可获得管线的三维空间位置。惯性陀螺定位仪正是运用了陀螺仪和惯性定位原理而研制的,其结构见图1。陀螺仪和加速度计分别测量了定位仪的相对惯性空间的3 个转角速度和3 个线加速度,然后通过坐标转换,将加速度信息转换成了沿着导航坐标系的加速度信息,并计算出定位仪的位置、速度、航向和水平姿态[1]。
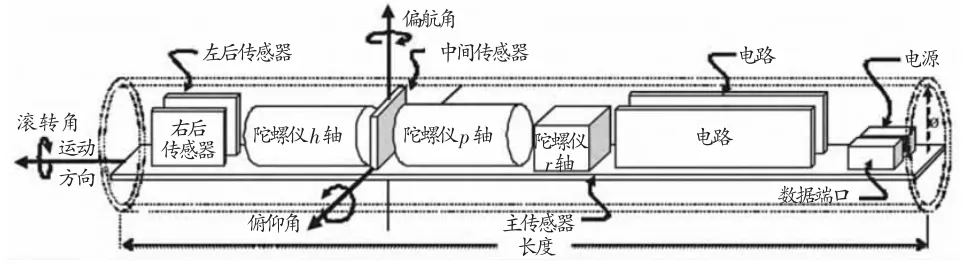
图1 惯性陀螺仪定位结构
2 系统结构设计
微机电系统(Micro-Electro-Mechanical System,MEMS) 陀螺仪测绘装置分为3 个部分,分别是测绘装置主体、里程计轮组及支撑轮组,每一个部分都是一个单独的模块,测绘装置的总体结构设计实现了集成化、模块化。MEMS 回转器中使用的STIM300 是一种体积较小、质量只有50 g 的惯导装置,其主要技术指标详情见表1。该轮组用螺栓连接方法对装置本体进行紧固,以确保该轮组拆装方便,连接可靠,可以通过对各种型号的轮组换装来实现对管线绘制最大尺度要求。
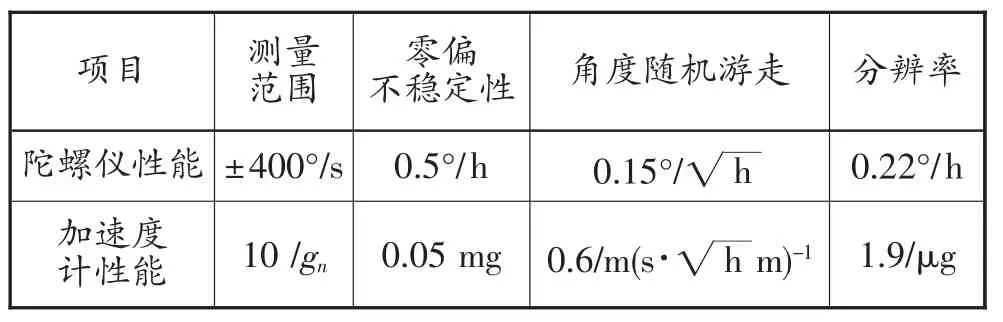
表1 STIM300 性能相关参数
3 数据库设计
3.1 数据采集模块
数据的采集包含两个部分:MEMS 陀螺仪数据采集和里程计数据采集。MEMS 陀螺以921 600 b/s的频率,以422 级的频率,以500 级的频率,将500 级的信息以每秒500 帧画面的方式传送出去,STM32 终端上有一个电平变换电路,它把422 级的电平变换成TTL 级,并经过STM32 的串行接口来接收信息:信息的获取是由霍尔感应器来完成的,每次与车轮上的磁性物质发生反应时,都会有一个升高的边缘,然后由STM32 的一个外部的中断来捕获升高的边缘,将距离的信息进行存储。本文将会介绍一种采集数据的方法,使用串口空闲中止与直接存储器访问(Direct Memory Access, DMA) 方法。在每次收到一个数据框后,就会产生一个空闲帧,这时候STM32 会对这个方法进行判定,然后引发一个空闲的中断。在高速数据的采集方面,这个方法要比普通的串口中断效率要高得多,并且还能确保数据的实时性。但是,因为一次采集的数据量很大,所以需要很长时间进行处理,占用CPU,造成将数据写入SD 卡一团糟。对此,建议使用串口DMA 来接收数据,不占用CPU 资源,这样就不会对数据的存储造成影响。因为公里计的数据是以脉冲的方式来进行记录的,所以当STM32 的GPIO口为上升缘跳变时,STM32 就会引发外部中止,在中止中累计脉冲量,每个脉冲量与1/4 的轮组周长相匹配,从而可以通过这种方式来间接地获取公里数据[2]。
3.2 数据存储模块
将串端口与DMA 的接收设置在STM32 上,每次MEMS 回旋轮发出一组数据,该串端口就会接收并经由DMA 运送至规定的BUF,直至收到一组完全的信息时,将该组完全的信息储存至BUF;该距离表的信息收集使用STM32 的外围干扰模式,并设定一个STM32 外围干扰,在GPIO 端口侦测到一个上升边缘跳跃时,就会启动该外围干扰,并累积所启动的脉冲数目。将两个传感器所收集到的信息进行了整合,并将其保存到FIFO 中,然后将FIFO中的信息写到SD 卡中,数据存储流程见图2。
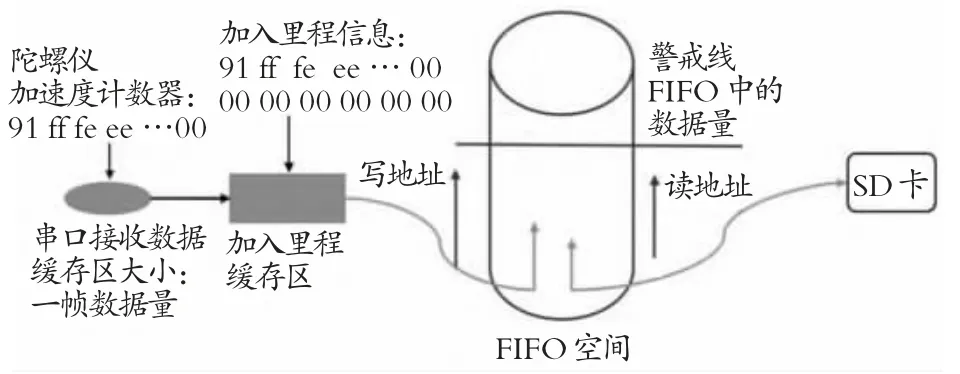
图2 数据存储流程
3.3 数据读取模块
此模块的作用是将SD 卡里面的数据通过USB方式读取。每一次测试完毕,用USB 线将其连接到PC 机,从PC 中读出SD 卡中的数据。在测量时,该模块不工作,只有在测量完成之后,通过计算机端USB 供电,实现PC 端对SD 卡的访问。要想直接存取SD 卡中的数据,必须把Fats 文件系统移到STM32 中,使其能够对SD 卡中的文件进行新建、复制、删除,最后才能对SD 卡中的文件进行直接管理。
4 应用实例
4.1 工程概况
某变电站110 kV 电缆线路埋设管线项目顶管为双回路,长2 270 m,采用非开挖顶管工艺进行施工。电缆线路埋设管线工程需要进行惯性陀螺的竣工检验,其地下管孔尺寸为110 mm。
4.2 外业测量
被测管线为全空无阻碍管线,管口露出。实地考察决定采用钢丝绳在电力管线中牵引三维姿态测量仪进行探测,测量前提前穿好拉线。
1) 测量坐标(井口)。用全球导航卫星系统(Global Navigation Satellite System,GNSS) 接收机或者全站仪测试待测管线中心线起点和终点坐标并记录。
2) 穿线。在管线内部穿入一条线,以便将惯性陀螺仪在管线内来回拖拉行进。常见的穿线方法有两种,一种是穿线器穿线,即用穿线工具在管线的一端放入,然后用手推管,使线路不停地进入管中,最后从管线的另一端穿出来,然后把暴露出来的穿线器的金属末端连接到一根牵引钢丝上,然后沿着原来的路线拉回到穿线器处,完成穿线工作;另一种是鼓风机穿绳,是把一根风筝绳系在一只充气塑料袋上,然后把它放在管线的一头,使用鼓风机朝管线入口的袋子方向吹气,直到袋子被吹到管线的另一头,完成穿绳。由于电源线井入口存在泥沙,鼓风机难以通过,因此采用4 mm 软质钢丝绳卷扬一端通过,再将两根钢丝绳分别与仪表的万向接头连接,然后将穿管工具从仪器一端拉出[3]。
3) 调节支架。根据管线口径调节前后支架,分别将仪器前端(里程轮端) 与后端(操作面板端) 支架螺母向外调节到支架臂松弛状态,并将仪器后端放入管线,前端轮也放入管线,向内调节支架螺母至弹簧开始收缩并受力,3 个轮子贴紧管壁(注:弹簧不要调节过紧)。拔出工具,倒过来,轻轻按住前3 个轮子,使它进入管线,后3 个轮子也进入管线,如法炮制,调整螺帽,使后3 个轮子紧贴管线。前后牵引装置,在牵引的力量下,托辊能够很好地旋转。确保管线的内壁对车轮有适当的压力,不能太宽松。
4) 配制检测工具。支架调整好之后,将设备尾部取出,打开电源开关(这时电源指示灯亮起),然后开机静置,在将仪器打开并进入测量状态后,将整个仪器放在管线中,使其处于自然扩张的状态,并且保持静止(轮不动),30 s 后启动(或手摇) 卷扬机,将仪器从一端(设为A 端) 穿行到另一端(设为B 端),在牵引的过程中,要尽可能地确保平稳,牵引速度不能过慢(建议在1 m/s 以上)。
5) 起点往终点行进。当设备接近B 端时要减速,并且要从管线入口处进行观察,以避免设备从管线中被拉出。当仪表达到管线B 端时(6 个轮都不出管线,支架中心轴的端面与管线的端面平齐),使仪表静止30 s,再向A 端拉动仪表。
6) 终点回起点。当设备接近A 端时要减速,并在入口处进行观察,以避免设备从管线中被拉出。在A 端停留30 s 后,将测试结果输入U 盘,并关闭测试设备。
7) 核对信息。将测试结果复制到计算机上,并对测试结果进行完整性检验,如步骤3~步骤6所示,可重复多次测试,增加测试结果可信度。
8) 解算与生成报告。开启管线三维信息测量软件,将外业测量数据输入系统中,并将起点和终点的大地坐标进行一键式的处理,最后得出测试报告。通过计算得到管线的绝对高度和平面坐标,从而得到管线中线轨迹。
4.3 数据处理与成图
1) 利用仪器配套的管线三维姿态测量仪计算机软件生成管线路径图,三维显示模式可以将管线的外形最直观地表现出来,而平面显示模式则有主视图、顶视图和侧视图3 个视角,并且可以在3D视图之间随意转换。正如所产生的工程10 井到9井-1 的剖面,俯视图见图3、图4。
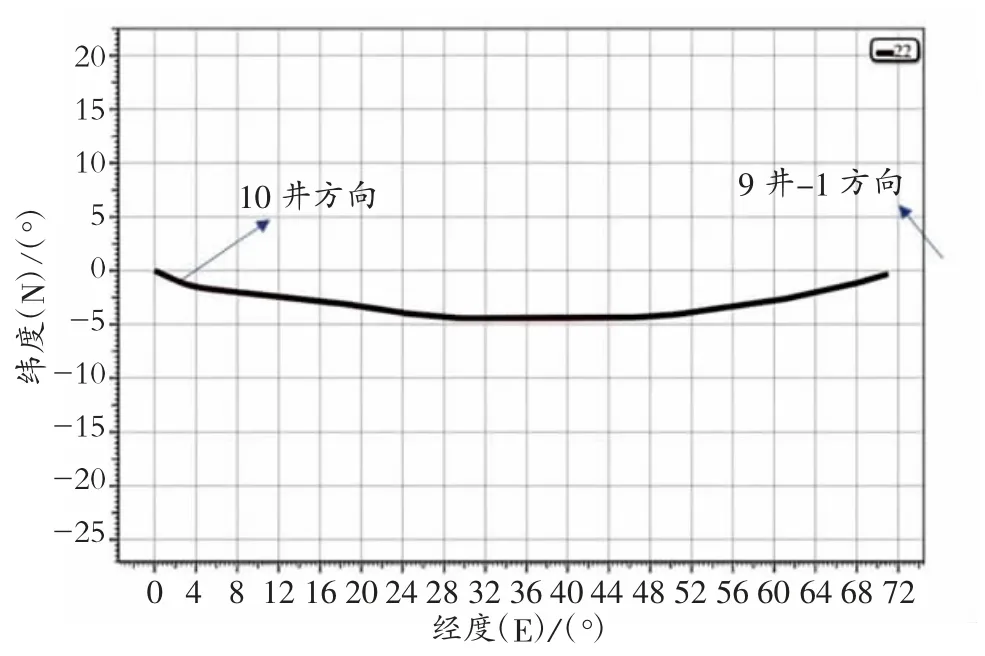
图3 10 号井至9 号井-1 段剖面
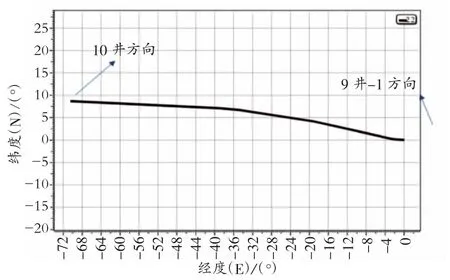
图4 10 号井至9 号井-1 段剖面俯视
2) 使用管线3-D 位置测量仪器计算机软件,生成管线路线信息表格(所产生信息长间隔可以选取,通常是1 m)。
陀螺仪的测量精度之所以远远超过管线探测器(示踪探测器),是因为管线探测器(示踪探测器)发射的电磁波具有较强的抗干扰能力和较大的变形能力。与之相比,陀螺是利用惯量进行定位的,不受外部环境的干扰;在检测时,不要求检测者在道路上使用跟踪装置,也就不会受到任何地形、电磁波、磁场的干扰。能单独测量任意厚度,测量精度极低,还能测量各种材料管材,如钢管、PVC 管、混凝土管等。所有的结果都是通过软件自动生成的,不需要任何人工操作,可以反复确认。利用惯性陀螺仪定位技术,可以对地下管线的走向、埋设深度和材料等进行精确的判断,保证了地下管线安全稳定[4]。
5 结束语
作为电力预埋管道的完工验收成果,管线完工测量数据作为其中一项,将此次测量的数据成图与工程施工时导向仪测量成果图进行重叠,所示的管线位置与二者走向基本一致,然而有一些地方管段会出现一些差异。之后,以现场管线出露点实地测量结果为依据,发现利用惯性陀螺仪定位技术测量的精度更加精确。对该项目的实例结果进行了剖析,并对其进行了技术应用的探索。结果显示,在对地面管道进行了竣工测量的过程中,使用了管道的位置进行了精确的测量,并且其绘制结果能够充分满足对工程测量和地面管道竣工测量的准确率的需要。
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02 08:24:32
羽毛球(2019年9期)2019-09-10 14:48:23
羽毛球(2019年8期)2019-09-10 07:22:44
中国自行车(2018年9期)2018-10-13 06:17:04
中国自行车(2018年7期)2018-08-14 01:52:56
中国自行车(2018年7期)2018-08-14 01:52:54
百科探秘·航空航天(2017年9期)2017-12-31 07:24:12
中国自行车(2017年1期)2017-04-16 02:54:06
山东工业技术(2016年15期)2016-12-01 05:32:01
发明与创新(2016年22期)2016-10-13 07:43:14
