路面裂缝检测与统计辅助系统设计
2024-02-27 04:43:24王磊
电子设计工程 2024年4期
王磊
(安康学院电子与信息工程学院,陕西安康 725000)
公路作为重要的基础设施与地区经济息息相关[1-3]。随着使用年限增加,路面多出现裂缝,如果能够提高对裂缝的早期发现,具有明显的社会意义和经济价值[4-5]。
宋兰平等[6]利用中值滤波,通过边界跟踪,提高了识别裂缝的准确率。王鑫等[7]针对Canny 算法[8]不能很好地区分路面附近的噪声,通过训练并获取恰当的阈值,进行了较好的解决。孙朝云等[9]通过训练SSD 模型进行裂缝结构特征的提取,提高了成功率。Subirats 等采用二维小波变换进行图像增强,然后进行裂缝图像二值化,明显提高分割效率[10]。
该文基于Matlab 的图像处理模块,准确判断裂纹的方向,提供统计信息,能够替代人工完成大量图像的识别,提高工作效率,对公路养护工作提供技术支持。
1 工作流程
采用Basler ace 2 工业相机对路面进行信息采集,并对图像进行预处理。整个处理流程可分为三步:首先,分辨出图像的无关部分并去除,即消除图像噪声;然后,对裂缝的信息进行增强,以便更好地显露裂缝特征;最后,完成裂缝的特征信息提取,并从大小、形状与分布等几方面进行统计和归类。系统工作流程如图1 所示。
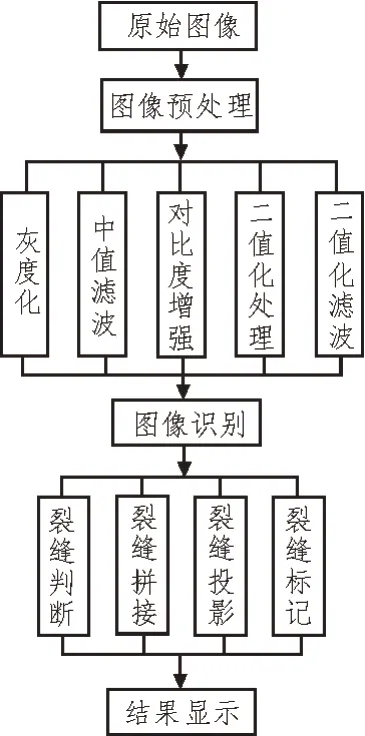
图1 系统工作流程
2 图像预处理
2.1 直方图均衡化
图像在采集过程中受到环境的影响,在某些细节上曝光量不足,容易造成了图像部分模糊部分清晰的视觉效果,为了均衡,对每个灰度值进行像素个数加权后求平均值,然后把平均值返回到每个像素上,达到均衡图像的整体细节,使图像中的裂缝有更好的对比效果。均衡效果如图2 所示。经过均衡化后,图像的细节得到显化,裂缝细节很明显在视觉效果上得到了加强,但其他噪声也同时得到了增强,不能达到裂缝信息提取的要求,还需要对其做进一步处理[11]。
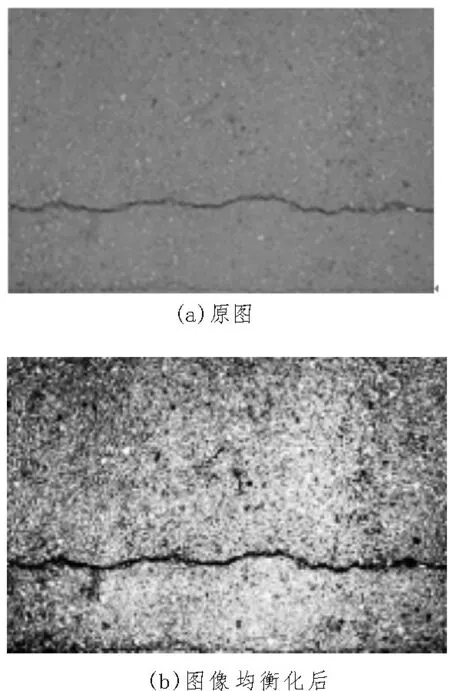
图2 图像直方图均衡化
2.2 滤 波
该文对比了多种滤波算法,最终确定采用中值滤波进行去噪,保留原始信息的同时,削弱噪声干扰,如图3 所示。经过对比不同核方框的中值滤波效果,最终采用了5×5 规格核方框。和其他滤波相比,中值滤波能够较好地保留原图像中裂缝的信息,图像较为清晰,便于后续更好地提取裂缝信息[12]。
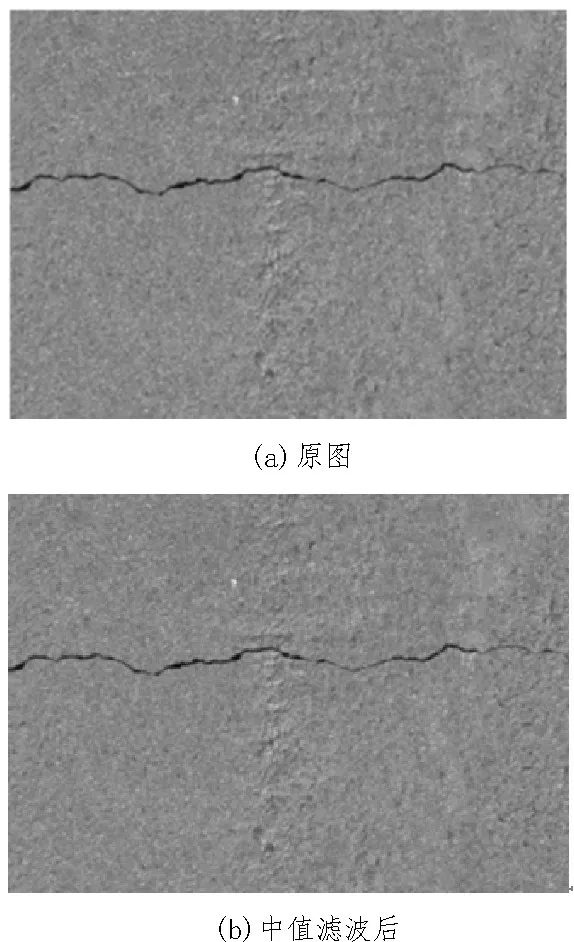
图3 中值滤波
2.3 图像对比度增强
经过直方图均衡化和中值滤波算法处理后,对于图像的后续处理过程提供了很好的条件,但这一过程中,边缘信息也相应减少了。由于图像识别过程中对像素的明暗较为敏感,该文采用伽马变换修正亮度值,如图4 所示,基本公式如下:
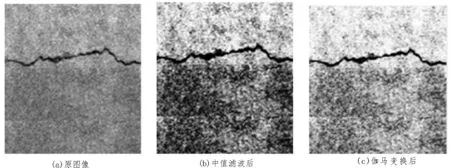
图4 伽马变换
式中,S表示修正结果,r表示原始灰度,c表示拉伸或缩放系数,γ表示伽马因子。要让灰度图像的亮度变暗,可使γ>1;要让灰度图像的亮度变亮,可使γ<1。经实验,以上图片经处理后,存在一定的椒盐噪声,具体表现为多个高亮点的形态,裂缝区域多呈阴影形态,亮度较低。所以伽马变换的参数设置应使图像亮度调低,即γ参数值大于1,通过数据对比,γ数值为2 时,对增强图像有很好的平衡效果[13]。
2.4 二值化处理
经过以上处理后,裂缝部分明显有别于其他区域,计算机已经能够很好识别出裂缝,为更好地进行科学描述,采用二值化处理,分别用“1”和“0”表示有用图像和无用图像。伽马变换后,裂缝的灰度偏低,其他区域灰度偏高。通过寻找一个阈值,将大于此阈值的部分,亮度都调为“1”,小于此阈值的部分,亮度都调为“0”,灰度图像就转换为黑白图像。
该文的阈值分割采用直方图双峰算法,观察裂缝图像的灰度值直方图,如图5(a)所示,在最暗图像和最亮图像对应的两个峰值之间,会存在一个谷值,这个谷值就是最适合的阈值,灰度值小于阈值则置为0,大于阈值则置为255。算法先找两个峰值,并对比峰值间各灰度级像素,最小值为谷值。
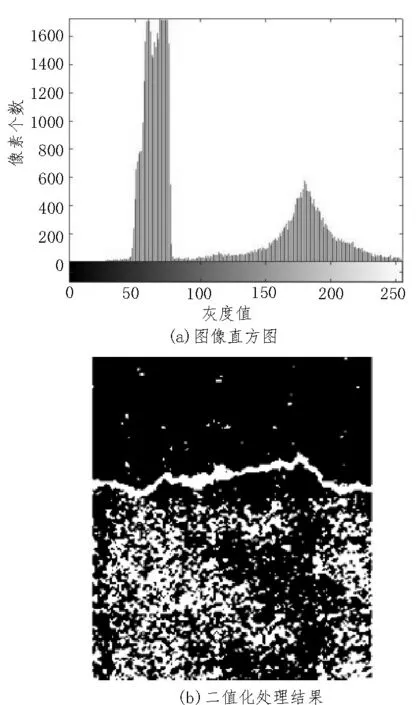
图5 二值化处理
2.5 二值图像滤波
由于路面材料有大量颗粒存在,在光照反射下会发生多种反射结果,正常的平整路面,其二值化图像会出现大量的颗粒干扰噪声,采用自定义阈值的方法虽然容易实现,但对于反射情况复杂多变的路面而言,这样的结果会出现很多问题。为此,该文采用迭代自适应法对自定义阈值处理输出结果进行多次反馈再输入输出,使最终结果更接近想要的二值化目标图像[14]。二值滤波结果如图6 所示。
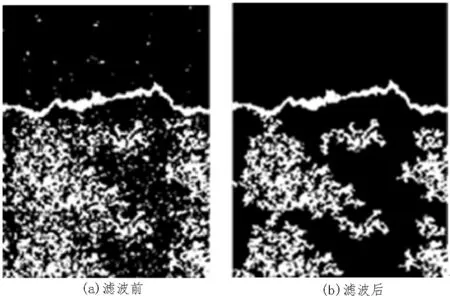
图6 二值图像滤波结果
由图6 的对比可知,滤波后的路面裂缝图像获得了较为理想的效果,有利于下一步的提取。为便于观察,对感兴趣的裂缝信息多取白色,因此最后的输出图像如有必要可以进行二值化取反。
3 路面裂缝图像的识别和统计
3.1 裂缝识别
预处理后的裂缝与背景存在明显偏差,由此,可进行裂缝提取与分割,并区分横向与纵向。为此选取连通区域长短轴之比作为特征,进行图像的分割提取,结果如图7 所示。在裂缝区域中,二值化连通区域的长短轴之比,明显区别与背景噪声的。根据裂缝的走向,对图像中某一区域的连通域进行遍历,如果长宽比大于某值,则判断该连通域属于裂缝,如长宽比小于该值,则对应连通域归零,即将灰度值调为0。
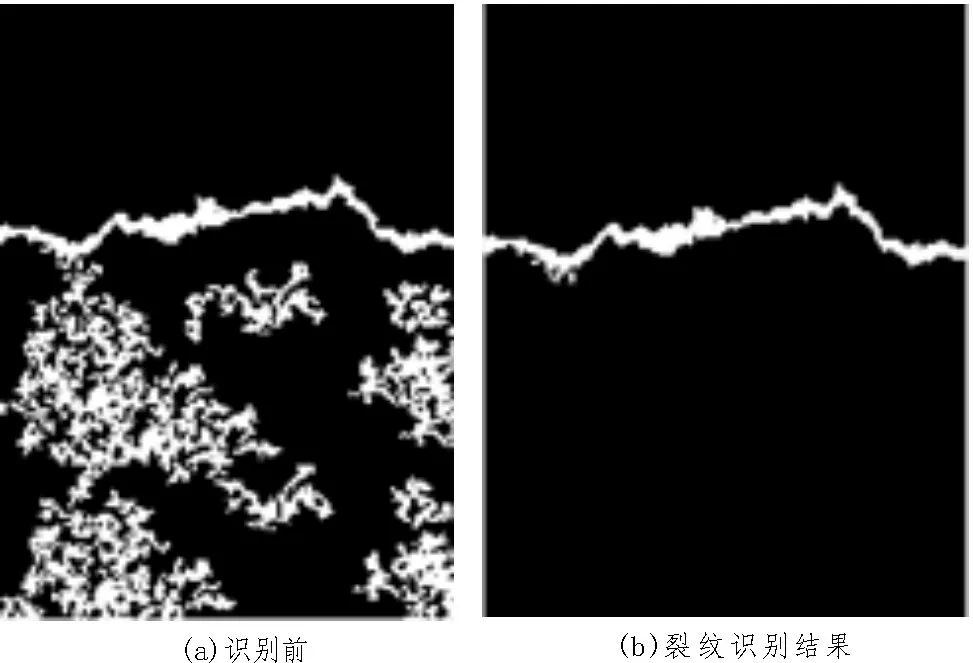
图7 裂缝识别
3.2 裂缝拼接
识别得到的二值化图像,经常出现雪花状的噪声信息。为此要进行腐蚀算法处理,然而在这一过程中,裂缝的图案也容易被腐蚀到,造成断裂。可分析断裂处数学形态特征,确定断裂位置并进行拼接。
首先设置一个连通域(邻域值为8),从第一个像素块开始,当检测到裂缝区域对应的1 时,设为开始点;自左向右检验,再次检测到1,将此目标块与前一个为1 的像素块的位置距离调为1 个匾历步长;每行调整后重置,自下一行首像素开始,经过遍历,进行裂缝拼接,如图8 所示。
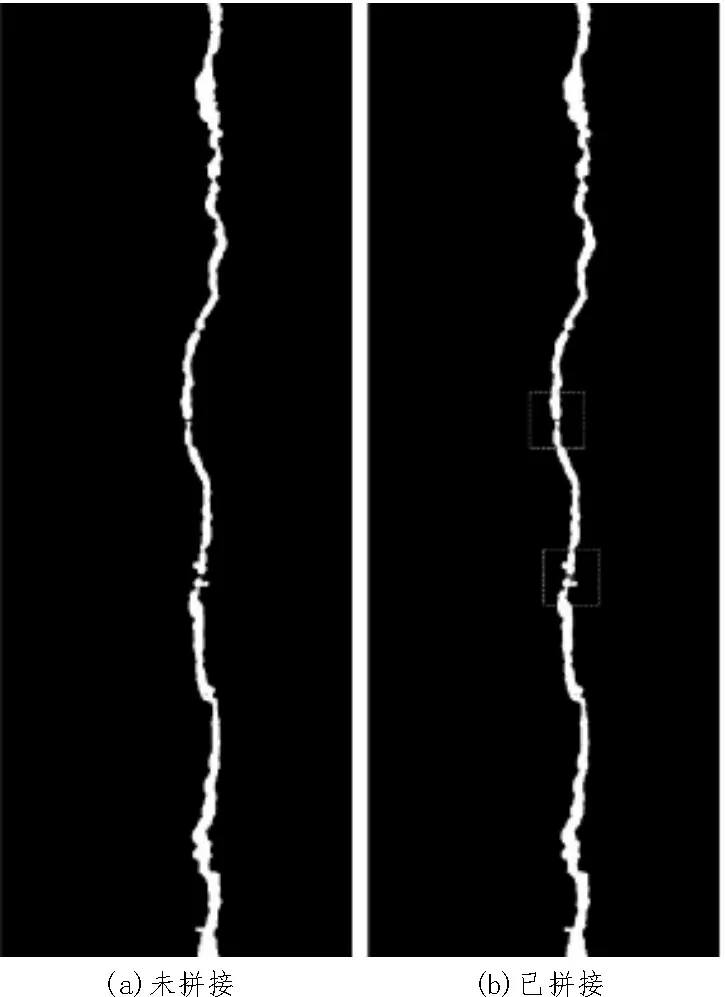
图8 裂缝拼接
3.3 裂缝分级与判断
该文对路面破坏的单项评价参数使用路面破坏状况指数PCI[15],分两步计算。首先,根据测量的路面破坏参数计算路面破坏率DR,然后,将路面破坏率进行满分消减,满分100,减去破坏参数,即为PCI值。PCI 值越小,则破坏程度越严重。
路面裂缝分为横向、纵向、渔网状。依据不同的长度、面积和深度,可将每一类分级为优、良、中、次、差。对公路状况进行科学评定,有利于对其进行高效的养护。该设计区分纵横裂纹,主要判断依据是长短轴比较,若横坐标轴长度大于纵坐标长度,则定为横向裂纹,反之为纵向裂纹。
3.4 路面裂缝标记
该设计对图像中的裂纹进行标记时,使用外接矩形,结果如图9 所示。外接矩形长宽比可用于裂缝纵横判断。公路破损检测指标中,裂纹的大小几何数值是路面评估的重要参数,用积分法来计算面积没有太大的参考价值,为了在做标记时增强直观感受,用矩形框把裂纹区域全部覆盖,能更好地估算受损情况[16]。计算横轴长度:首先,提取图像横轴总长H,然后,从左侧第一列从上而下进行识别,当发现到第一个为1 的二值化单元格时,记录其坐标(a,b),如果没有识别到,则进入下一列继续,遍历识别按从左至右的顺序,直到完成最后一列,获得最后一个为1 的单元格坐标(c,d),裂缝宽度为c-a。同理可得裂缝长度。
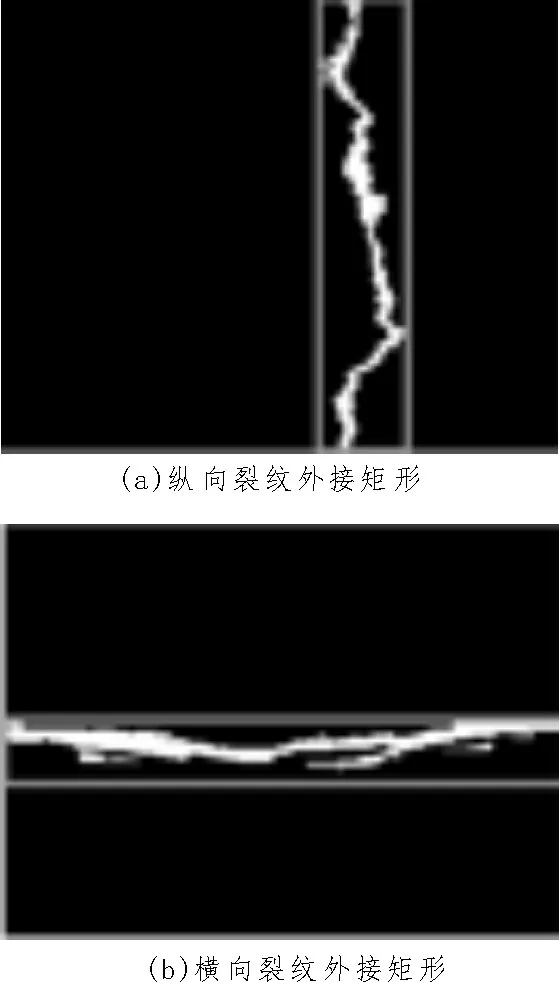
图9 裂纹的标记
3.5 系统界面
该设计的系统界面,不仅显示了识别结果,对裂缝进行了标记,也展示了系统识别裂缝过程的中间结果,呈现处理过程的细节和步骤,提高系统的可操作性和易用性[17]。系统界面分为控制面板和显示区域两个部分。显示区可显示不同阶段的处理结果。控制面板有多个按钮,对应不同处理阶段。要显示当前选定的参数,可以单击“显示参数”按钮界面显示,如图10 所示。
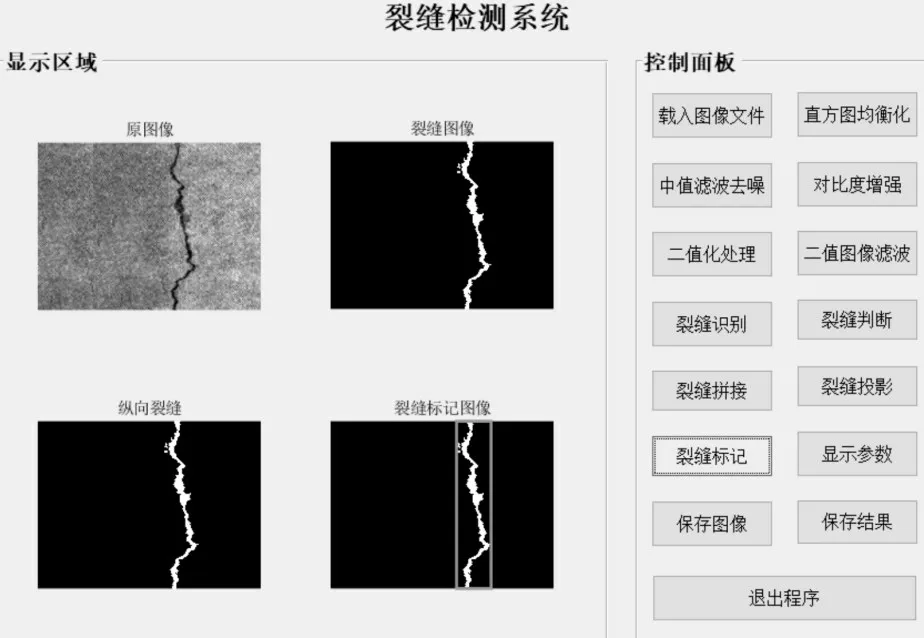
图10 界面显示
4 结论
该辅助系统基于Matlab 的图像处理方法,首先,通过灰度化、中值滤波去噪等预处理手段,增强了图像中裂缝目标与背景目标的区分度;然后,借助图像数学形态信息进行裂缝的提取、判断与标记。该系统经过大量的训练可以有效识别横向裂纹以及纵向裂纹,替代人工完成裂缝的判断与标记,对提高公路养护工作效率具有一定的应用价值。
猜你喜欢
高中数理化(2024年1期)2024-03-02 17:52:40
湘潭大学自然科学学报(2022年2期)2022-07-28 05:26:40
北京航空航天大学学报(2022年6期)2022-07-02 02:00:02
黑龙江大学自然科学学报(2021年4期)2021-11-19 07:05:10
高技术通讯(2021年3期)2021-06-09 06:57:48
高技术通讯(2021年2期)2021-04-13 01:09:46
摄影之友(影像视觉)(2018年12期)2019-01-28 09:01:02
测控技术(2018年10期)2018-11-25 09:35:28
自动化学报(2017年5期)2017-05-14 06:20:56
计算机应用(2016年10期)2017-05-12 15:22:34