基于稀疏重建和激光实境复制的电力工程建模方法
2024-02-27 04:43:30胡轶龙李卓彬
电子设计工程 2024年4期
周 鑫,胡轶龙,张 潇,李 豪,李卓彬
(国网北京市电力公司电力建设工程咨询分公司,北京 100021)
随着我国电网建设规模的不断扩大,电网系统 安全、平稳运行的需求也在逐步提高。作为电网重要的组成部分之一,输电线路是电力运输的载体,其结构完整性始终是电力工程管理部分的检测重点。当前,电网工程输电线路验收仍采用人工测量的方式,但该种方式在测量准确性、全面性及安全性等方面均存在一定的局限。
由于无人机与数学建模技术的持续发展,输电线路的工程验收也有了新的实施方案。常用的模型重建方法有GPS、激光成像和双目视觉(Stereo Vision)等[1-3]。其中GPS 方法虽然测距精确,但操作较为复杂,且花费的时间、成本偏高。双目视觉法通过模拟人类双眼来对目标进行扫描,其优点是成本低,而缺点则是测量准确度较差,导致在机载平台的表现不理想。而激光成像虽成本较高,但该方法可准确测量输电线路表面的具体坐标,同时机载的实时性也较强。因此,文中使用激光雷达来获取输电线路的点云数据(Point Cloud Data),并利用重建算法对点云数据进行准确还原。
1 输电线路激光点云数据获取
1.1 激光雷达与点云数据
无人机机载激光雷达[4]是一种准确性高、实时性强的距离获取技术。而点云数据[5]指的是激光雷达从探测目标表面获取的三维坐标点。作为一种主动式的探测方法,激光雷达的工作原理是向探测目标发射脉冲信号,该信号接触到物体表面后会反射进入雷达接收机中,再通过对回波信号分析进而得到目标的距离、角度与速度等信息。
激光雷达的测距公式为:
式中,r是目标与激光雷达的距离,c 为光速,t为发射信号与回波信号的传播时间差。
激光雷达所在空间为球坐标系,假定激光雷达坐标为(r,ω,α),则球坐标系具体如图1 所示。

图1 球坐标系
但在实际世界中的坐标数据则为直角坐标,因此需要将原始点云数据由球坐标系变换至直角坐标系。点云数据包括水平角、俯仰角以及方位角,坐标转换可表征为:
1.2 点云数据预处理
为了使后续模型重建更为精确,还需对点云数据进行预处理。在雷达实际测量过程中,由于受制于环境或自身误差因素的影响,通常会出现离散点。而离散点与实际测量点之间的距离较远,故需选择算法对其进行去除。
文中使用索引树近邻搜索法(K-dimensional Tree,Kd-Tree)[6-9],该方法属于聚类算法。其将原始点云算法汇集至索引树中,并搜寻点云数据中的近邻数据,且对满足要求的点进行聚类,再计算平均距离。该计算过程如下:
式中,di为点云P中任意一点pi与邻近点的平均距离,k为邻近点个数,j为邻近点序号。
数据点过滤的门限值如下所示:
式中,μ为门限值,N为点云P中所有数据点的总数量。数据标准差σ为:
则过滤阈值由门限值和数据标准差共同决定,计算公式如下:
式中,α为固定参数,由具体数据集合确定。判断点di是否满足式(6),若不满足,则将其判定为离群点,作删除处理。离群点过滤流程如图2 所示。
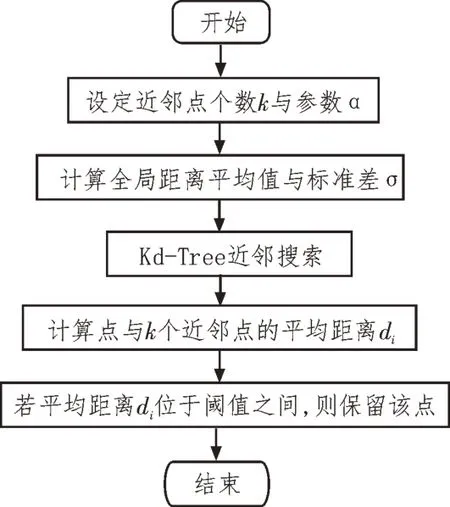
图2 离群点过滤流程
1.3 点云数据输出
完成点云数据的采集和预处理后,再进行输出。数据输出流程如图3 所示。
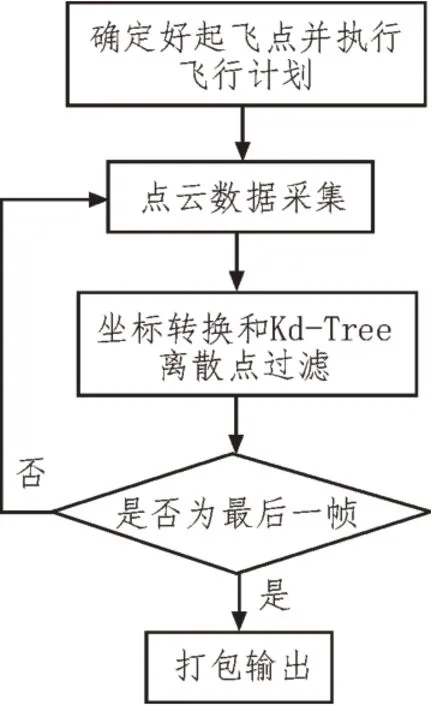
图3 数据输出流程
文中点云数据的输出包括四个部分:
1)确定好起飞点,规划飞行路线并进行数据扫描;
2)机载激光雷达在直角坐标系下,生成原始点云数据集合P,同时使用Kd-Tree 对离散点进行过滤;
3)设置激光雷达扫描次数,且组成一帧数据;
4)点云数据集打包输出。
最终输出的点云数据如图4 所示。
2 点云数据重建
2.1 稀疏模型重建算法
稀疏模型重建算法(Structure From Motion,SFM)[10-12]是一种基于雷达的自标定重建方法。其能提取激光点云三维数据的主要特征点,并对主要轮廓进行重建。假设激光点云数据共有m帧,且每帧均有k个坐标,则点云稀疏表示如下:
式中,xij代指第i帧图像中第j个点的稀疏表示,Pi表示第i帧的投影矩阵,Xj表示第j个点云数据点的坐标。
在点云数据重建时,需按照误差最小的原则进行操作,以此避免结构陷入局部值而导致的重建终止。同时,选择相邻的两幅图像对算法参数进行初始化。误差最小化原则为:
式中,R、T为相机姿态,K(∙)为临近函数,D(∙)为距离函数。基于以上过程,最终得到模型的稀疏框架。
2.2 稠密模型重建算法
由于稀疏模型重建算法仅能对点云框架进行重建,所得到的模型无法正常使用,因此还需进行稠密重建过程(Multi-View Stereo,MVS)[13-16]。文中选用了面片重建算法,该算法模型如图5 所示。
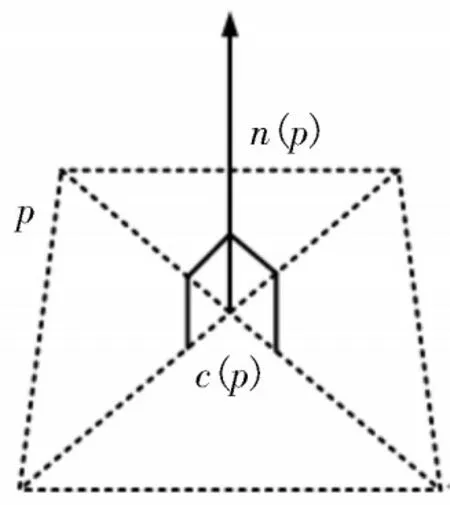
图5 面片模型
图5 中,面片模型为一个模拟的矩形。该结构由三部分组成,包括中心点c,与中心点垂直的法向量n,矩形平面p。中心点即为点云数据点,矩形平面的选择参考2.1 节中稀疏点的选择方法,而在稀疏框架中则以5 个像素为单位进行选择。
面片重建算法由以下步骤组成:
1)初始化匹配。根据稀疏框架,搜索点云图像特征值。参数初始化过程为:
式中,O(Ii)为图像的光心,f为图像特征点,Ii为第i帧图像。
2)面片扩展。该过程将稀疏数据点扩展为稠密数据点。对于初始化完毕的面片p,构建邻域集合C。其计算方式如下:
其中,Ci为图像小块,Qi为面片优化后的集合。
3)面片滤波。在构建过程中,可能会存在因面片扩展而造成的误差较大部分,因此需对面片进行滤波处理。滤除阈值可表征为:
式中,V(p)为可视化图像合集,U(p)为投影区间,g(p)为滤除概率,*表示上次更新前的数值,经过比较后更新面片优化合集。
综上所述,基于稀疏-稠密算法的点云数据重建算法流程如图6 所示。

图6 数据重建算法流程
3 算法性能测试
3.1 机载实验平台
为了进行环境扫描及场景重建,文中设计了完整的机载激光雷达系统。该系统包括大疆工业无人机、Livox 激光雷达与机载数据采集单元等。实验平台的具体信息如表1 所示[17-18]。

表1 实验平台具体信息
数据采集完毕后,重建工作将在计算机平台进行,并使用Matlab R2017a 完成点云数据的预处理及稀疏-稠密重建。后端实验平台信息如表2 所示。
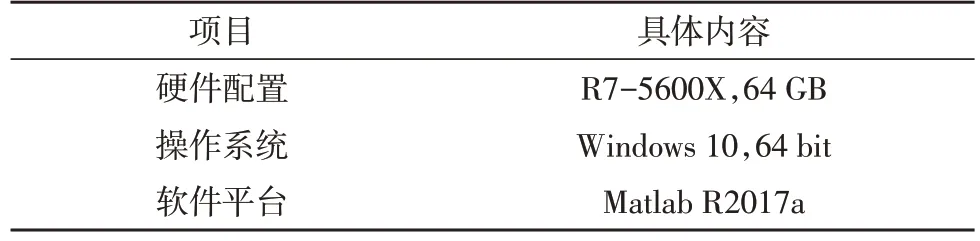
表2 后端实验平台具体信息
3.2 仿真结果分析与对比
实验分为点云数据生成测试与重建功能验证。点云生成测试采用机载激光雷达对某电网输电线路进行拍摄,对比算法选择了迭代最近点(Iterative Closest Point,ICP)、广义迭代最近 点(GeneralizedICP,GICP)及同态滤波算法(Homomorphic Filter)。算法对拍摄的图像进行点云生成测试,参照标准为输电线路的实际测试值。而指标则为点云数据误差值,定义为实际生成与标准点云坐标之间的距离平均误差。实验结果如表3 所示。

表3 实验结果
由表3可知,该文算法的点云误差值仅为8.42 cm,与其他算法相比该值为最小。这充分表明了所提算法的性能优良且点云提取更为精确。同时该文算法的运行时间最短,说明其效率较高。利用四种算法生成点云数据的直观效果如图7 所示。可以看到,该文算法生成的点云数据更为稠密,相较其他算法更符合实际情况。
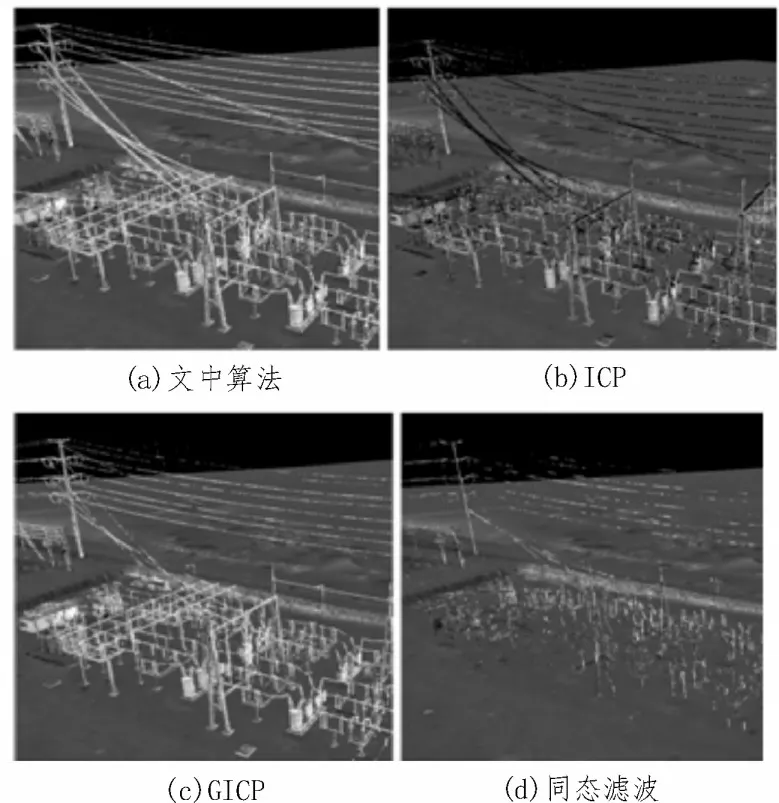
图7 点云对比结果
此外,还对模型重建能力进行验证,结果如图8所示。从图中可知,稀疏-稠密算法结合了数据的相关特性,能更优地对原始点云稀疏点数据加以还原,且重建后的图像可视化程度优良。由此表明,所提重建算法可应用于实际工程中。
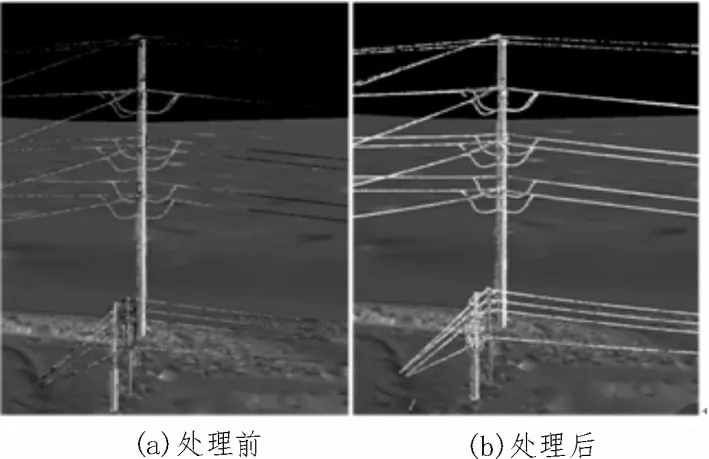
图8 重建结果
4 结束语
输电线路结构完整性始终是电力工程管理部分的检测重点,但此项巡检或验收任务仅依靠人力,存在诸多不便。文中基于激光雷达以及点云数据提出了一种输电线路扫描重建算法,其采用索引树近邻搜索法对原始点云数据进行预处理,以获得重建后的点云数据。再通过稀疏-稠密算法进行框架特征提取与填充,最终完成输电线路内容的重建。实验结果表明,该文算法的性能及效率皆为最优,且重建模型的可视化程度优良。
猜你喜欢
北京测绘(2022年5期)2022-11-22 06:57:43
汽车观察(2021年8期)2021-09-01 10:12:41
中国煤炭工业(2019年5期)2019-11-04 00:53:32
中国交通信息化(2019年1期)2019-03-26 06:43:46
电子制作(2018年16期)2018-09-26 03:27:00
制导与引信(2017年3期)2017-11-02 05:16:56
工业设计(2016年11期)2016-04-16 02:50:19
幸福家庭(2016年3期)2016-04-05 03:47:08
环境科技(2015年6期)2015-11-08 11:14:26
电网与清洁能源(2015年2期)2015-02-28 16:03:07