多微型逆变器微电网频率暂态稳定综合控制研究
2024-02-26 07:39李庆军邰建豪崔章顺
电源学报 2024年1期
李庆军,邰建豪,范 越,崔章顺
(1.国网青海省电力公司建设部,西宁 810008;2.河南财经政法大学资源与环境学院,郑州 450000;3.北京洛斯达科技发展有限公司西北分公司,北京 100120)
微电网属于分布式电源、能量转换装置、储能装置与有关保护装置等组成的小型发配电系统,可以满足小范围内用户的供电需求,其控制方式比较灵活,能够独立运行,还能够并入电网运行[1]。微电网的优点是能够利用风能与光能等清洁环保的可再生能源,解决化石能源缺少的能源危机;微电网属于大电网的辅助,在大电网出现故障的情况下,微电网以确保本地负载正常供电为基础,为大电网输送功率,增强电网运行的可靠性与安全性[2];改变传统电网的远距离输电方式,减少输电线路的损耗,节约检修维护成本,提升输电效率;具有即插即用的灵活控制方式;满足用户多样化的需求[3]。微电网中分布式电源的种类与数量逐渐增多,其规模和容量也随之扩大,增加了系统的繁琐程度,导致微电网出现暂态情况,造成系统运行的不稳定[4]。微电网运行稳定性的关键因素是暂态稳定性控制[5]。
同步发电机具有较好的惯性特征和阻尼特征,能够依据同步发电机自身动能与电网实施能量转换,提升电网运行的稳定性。通过模拟同步发电机的运行特征研究虚拟同步发电机VSG(virtual synchronous generator)技术,使微型逆变器存在和同步发电机一致的转动惯量和阻尼特征,提升微电网的动态性能。VSG 技术在负荷大扰动情况下,微电网仍会出现暂态不稳的现象,从而导致微电网运行动荡,损害微电网中的用电设备,为所连大电网带来不利因素。针对这个问题,研究多微型逆变器微电网频率暂态稳定综合控制,提升微电网运行的暂态稳定性。
1 多微型逆变器微电网频率暂态稳定综合控制方法
1.1 虚拟同步发电机技术
在多微型逆变器中应用虚拟同步发电机技术,可以使多微型逆变器模拟同步发电机的频率与电压输出等特征。VSG 技术由励磁控制器与功频控制器组成。
1.1.1 励磁控制
VSG 内的励磁控制器原理与传统同步发电机一致,如图1 所示。
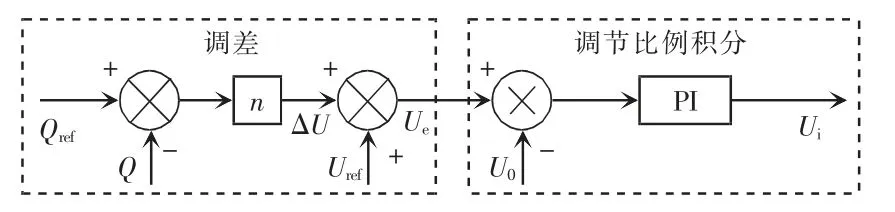
图1 励磁控制器原理Fig.1 Schematic of excitation controller
调差指合理分配每个VSG 并联运行过程中的无功负荷,Uref为VSG 的电压参考值,ΔU 为电压变化量,Ue为调差电压,Qref为无功功率参考值,Q 为实际输出的无功功率。调节比例积分指调节多微型逆变器微电网的输出电压,U0为VSG 输出电压,在无功负载突变情况下,采用励磁控制器调节,使多微型逆变器微电网保持一个新的电压水平Ui。
1.1.2 功频控制
VSG 的转子运动方程为
式中:B 为同步发电机的转动惯量;wref为多微型逆变器微电网同步角速度参考值;w 为实际角速度;Pref为有功功率参考值;Pe为输出有功功率;D 为阻尼系数;δ 为发电机功角。
实际角速度w 和实际频率f 间的关系是w=2πf,频率变化率可表示为
式中:fref为频率参考值;kw为两个频率测量之间经过的时间。
根据式(1)与式(2)可知,在VSG 功频控制方程内加入转动惯量,能够模拟同步发电机的转子惯性,在出现小扰动负荷时,VSG 输出频率基本没有变化,能够提升多微型逆变器微电网频率暂态稳定性[6]。
1.2 改进下垂控制方法
在大负荷扰动时,通过改进的曲线型下垂控制方法与综合切换控制策略,确保多微型逆变器微电网有功出力正常与频率暂态稳定[7]。在大负荷扰动导致频率严重偏移的情况下,从VSG 控制方法转换为曲线型的改进下垂控制方法,确保多微型逆变器微电网既能正常输出功率,又能保持电压频率暂态稳定[8]。
改进下垂控制方法的有功-频率函数f(Pref)需要符合两个条件:确保2 种方法的连接点处是连续可导的;频率控制在安全范围中,始终大于最低频率fmin。
通过式(2)获取VSG 控制方法在切换点处的频率变化率,结合上述两个条件,设置指数函数为
式中,a 与b 为常数,通过满足切换点(Ps,fs)同时出现在两种控制方法的函数曲线上以及切换点处VSG 控制方法和改进下垂控制方法的频率变化相同两个条件,获取常数a 与b 的值。根据式(3)可知,利用改进下垂控制方法控制后,因为存在指数函数,所以输出功率与频率降低的变化率成反比,且频率一直大于fmin,能够保持多微型逆变器微电网频率暂态稳定[9]。利用VSG 控制方法的情况下,在频率接近fmin时,需更换控制方法,此时相应的输出功率是Ps,即
式中:Ps为输出功率参考值;Pe为输出有功功率;j为系统参数;U(t)为瞬时电压;I(t)为瞬时电流。由于j 是个变量,因此当j 发生变化时,Ps也会随之改变,两者呈正比例关系。
改进下垂控制的无功(电压)控制器与VSG 的励磁控制器原理一致,有效降低两种控制方法生成参考信号幅值的差别,不会造成参考电压幅值的突变[10]。
1.3 综合控制
当多微型逆变器微电网频率未超出正常范围时,通过VSG 控制方法,可确保输出功率和电压频率的暂态稳定。若出现小扰动负荷,VSG 控制方法能够确保多微型逆变器微电网频率稳定地过渡到新的稳定点;若出现大扰动负荷,多微型逆变器微电网频率开始偏移且偏移情况较重,需要将VSG控制方法变换成改进下垂控制方法,既能确保输出功率正常,又能保证频率快速恢复到正常范围[11],使多其安全稳定运行得到保障[12]。图2 为多微型逆变器微电网频率暂态稳定综合控制原理,图中:iabc为VSG 的输入电流;Uabc为VSG 的输入电压。

图2 综合控制原理Fig.2 Schematic of integrated control
1.3.1 VSG 方法与改进下垂方法电压同步控制
在大扰动负荷时,多微型逆变器微电网的输出有功功率大于设置的Ps的情况下,多微型逆变器从VSG 控制方法切换成改进下垂控制方法,两种控制方法在输出功率均为Pe时,获取的电压幅值、频率与相位并不相同,此时更改控制方法,多微型逆变器输出电压会出现畸变,不能保证其稳定运行[13],这就需要在更换控制方法前,同步控制输出电压。由VSG 控制方法更换成改进下垂控制方法的电压同步控制器1 如图3 所示。
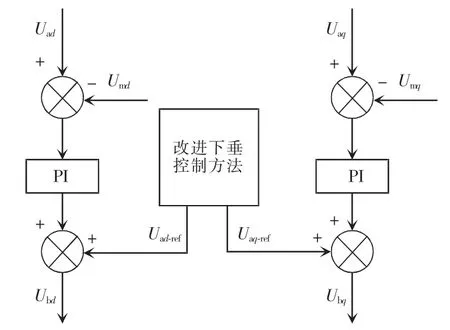
图3 电压同步控制器1Fig.3 Voltage synchronization controller 1
通过dq 坐标旋转变换VSG 控制方法的输出电压,由直流分量Uad与Uaq代表交流电压U,并未直接调节电压与频率,利于实施线性PI 控制电压与频率,避免造成多微型逆变器微电网的动荡。比较Uad、Uaq和多微型逆变器微电网母线电压的dq轴分量Umd、Umq,由PI 控制调节偏差,将调节后的偏差分别和改进下垂控制方法输出信号的dq 轴分量Ubd-ref与Ubq-ref相加,获取最终控制信号Ubd与Ubq,将其当作电压电流双环控制的输入。
图4 中VSG 控制方法输出电压的dq 轴分量为Uad-ref与Uaq-ref。由改进下垂控制方法更换成VSG控制方法的过程中,同样需采用电压同步控制器避免电压畸变,如图4 所示。
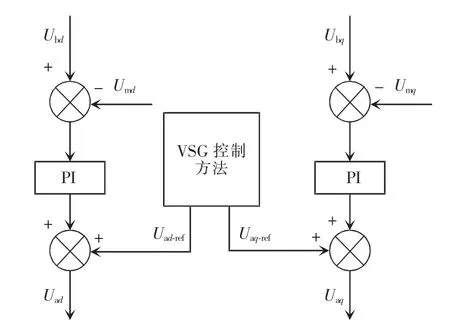
图4 电压同步控制器2Fig.4 Voltage synchronization controller 2
1.3.2 VSG 方法与改进下垂方法双环控制
双环控制器既能缓冲上层功率控制器输出的控制信号,又能提升多微型逆变器微电网输出的电能质量,还能抑制更换控制方法过程中形成的暂态动荡[14]。双环控制器的外环通过PI 控制准确控制输出电压,内环通过比例控制准确控制电流,由电压外环电流内环构成双环控制器。内环电流的反馈用滤波器的电容电流iC表示,以便实现电容电流的快速调节,确保通过电容电流微分获取的输出电压也能迅速调整,双环控制器原理如图5 所示。

图5 双环控制器原理Fig.5 Schematic of double-loop controller
图5 中:U 为功率外环输入的参考电压;C 为滤波器电容;L 为滤波器电感;iCref为电流内环控制的输入电流参考值;h 为电流内环控制的增益系数;hpwm为多微型逆变器接口传递函数;iL为电感电流;s 为多微型逆变器微电网电流;im为电容电流;iC为输出的控制信号;Upwm为输出电压。
以U 为输入电压,Upwm为输出电压,获取电压外环传递函数公式为
式中,hup和hui为PI 控制器的传递函数。
电压外环比例增益函数公式为
以iCref为输入电流,iC为输出电流,获取电流内环的传递函数公式为
电流内环比例增益函数公式为
多微型逆变器的等效输出阻抗公式为
电压外环电流内环双环控制的优点是稳定性高与响应速度快等。虽然电压与电流反馈回路的增益函数高,但是稳定性和增益函数没有形成冲突,确保了输出电压的高精度[15]。
在工程实际中,为了保障供电的安全性和可靠性,微网储能系统需要在并网与离网之间进行切换,为了保证系统平稳切换,需要在公共连接点处加装断路器开关,通过给系统加入断路器控制模块,来实现平稳切换的稳定性。加装断路器切换控制模型如图6 所示。

图6 加装断路器切换控制模型Fig.6 Switching control model of additional circuit breaker
当断路器开关断开时,微电网系统与大电网的能量传输通道被切断,处于离网运行状态,同时双模式控制器控制其模式切换过程,使并网运行控制模式切换至离网运行控制模式;当断路器开关闭合时,微电网系统与大电网的能量传输通道导通,处于并网运行模式,同时双模式控制器控制其模式切换过程,使离网运行控制模式切换至并网运行控制模式,最终实现本文系统在双模式转换状态下的平稳切换。基于上述过程,实现多微型逆变器微电网频率暂态稳定综合控制的策略流程如图7 所示。

图7 综合控制策略流程Fig.7 Flow chart of integrated control strategy
综合控制策略具体步骤如下。
步骤1采集多微型逆变器输出的三相侧电感电流iabc与三相电容电压Uabc,计算得到多微型逆变器微电网的输出功率P。
步骤2比较输出功率P 与设置的Ps,选取控制方法。P≤Ps时应用VSG 控制方法;P>Ps时应用改进下垂控制方法。
步骤3决定是否更换控制方法,不更换控制方法时,电压同步控制器不需工作;将VSG 控制方法更换成改进下垂控制方法时,运用电压同步控制器1;将改进下垂控制方法更换成VSG 控制方法时,运用电压同步控制器2。
步骤4由双环控制器整理控制信号,输出电压信号,传入脉宽调制PWM(pulse width modulation)控制器,形成PWM 控制信号。
步骤5输出控制信号,完成多微型逆变器微电网频率暂态稳定。
2 实验分析
在PSCAD 仿真环境中搭建存在2 个微型逆变器的微电网模型,微型逆变器1 属于储能蓄电池,当作微电网主电源,微型逆变器2 属于光伏源,当作微电网从电源,通过调节负荷,验证本文方法的有效性与准确性。2 个微型逆变器的微电网模型如图8 所示,具体参数如表1 所示。
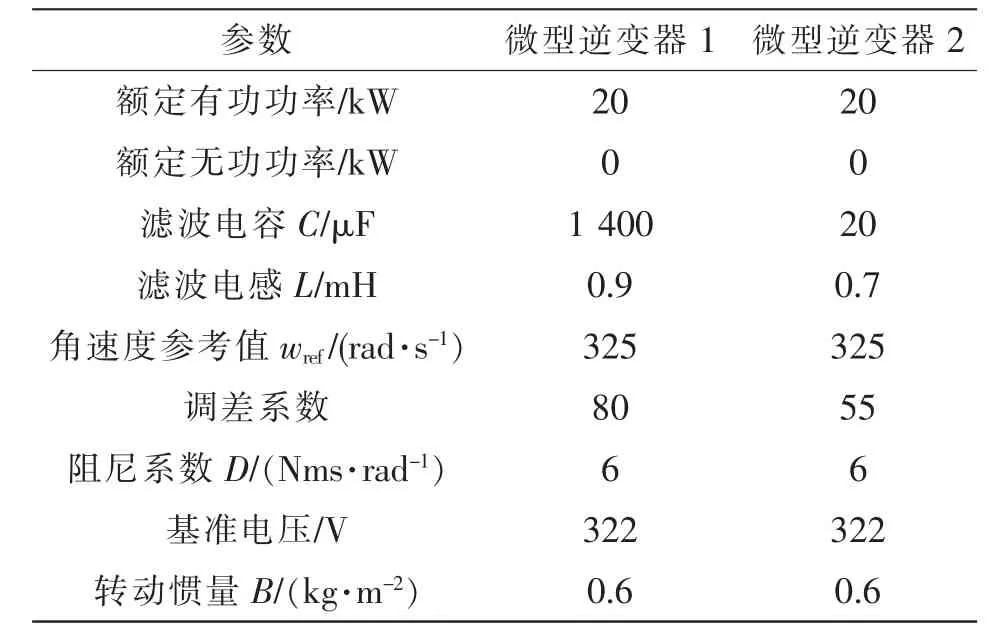
表1 模型参数Tab.1 Model parameters

图8 微电网模型Fig.8 Microgrid model
其中,固定负荷有功功率是20 kW,无功功率是0;调节负荷1 有功功率是6 kW,无功功率是0;调节负荷2 有功功率是9 kW,无功功率是0;调节负荷3 有功功率是5 kW,无功功率是0;未增加光照强度时微型逆变器2 的最大输出功率是5 kW,增加光照强度后,最大输出功率是10 kW。本文方法的改进下垂控制方法在Ps=28 kW 时,频率偏移严重,最低频率为41 Hz。
2.1 调节负荷时控制方法有效性分析
仿真设置,第1 步关闭E3,使微型逆变器按照额定功率运行;第2 步在0.6 s 时,关闭E1,加入负荷1;第3 步在1.2 s 时,关闭E2,加入负荷2;第4步在2.1 s 时,增加微型逆变器2 输出功率。分别在离散与连续2 种形式下进行仿真实验,利用本文方法与VSG 方法的微电网有功功率控制结果如图9所示。
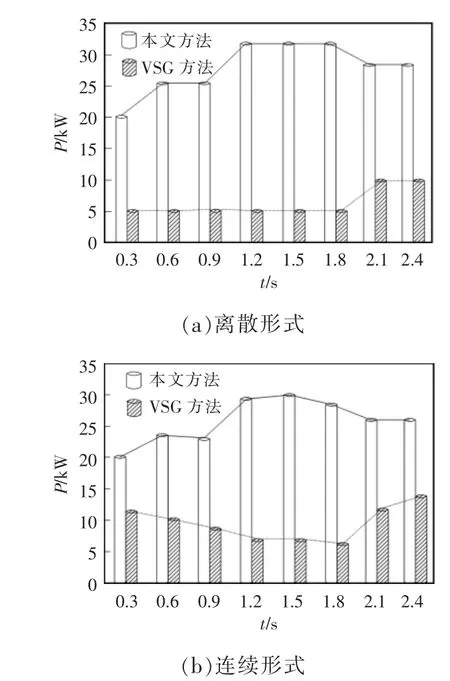
图9 2 种方法输出有功功率Fig.9 Output active power based on two methods
根据图9 可知,在0.3 s 前微型逆变器1 输出有功功率是20 kW,在安全范围内运行;在0.5 s 时总负荷提升到31 kW,微型逆变器1 输出有功功率增加到20 kW 以上,但低于设置点Ps的28 kW,继续应用VSG 控制方法;在1.2 s 时总负荷提升到40 kW,微型逆变器1 输出有功功率增加到30 kW 左右,高于设置点Ps的28 kW,将VSG 控制方法更换成改进下垂控制方法;在2.1 s 时增加光照强度,微型逆变器1 的输出有功功率降低到28 kW,由改进下垂控制方法更换回VSG 控制方法。
利用本文方法与VSG 方法的微电网电压频率控制结果如图10 所示。

图10 2 种方法微电网电压频率控制情况Fig.10 Voltage and frequency control of microgrid based on two methods
分析图9 和图10 可知,当微型逆变器1 处于正常运行范围时,通过VSG 控制方法维持微电网频率的暂态稳定,使频率维持在55~60 Hz;当微型逆变器1 输出的有功功率突增且小于Ps时,继续通过VSG 控制方法维持微电网频率的暂态稳定,此时频率虽有小幅度偏移,但仍然维持在正常范围;当微型逆变器1 输出功率大于Ps时,继续利用VSG 控制方法会导致微电网频率出现大幅度偏移,降低至正常范围外,将VSG 控制方法更换成改进下垂控制方法后,能够使微电网频率维持在40 Hz以上。实验证明,本文方法在不同情况下能够及时更换控制方法,有效控制多微型逆变器微电网频率的暂态稳定。
2.2 切换运行模式时控制方法准确性分析
以微型逆变器1 为例,不加入任何负荷,验证本文方法在并网模式与离网模式切换时频率控制的准确性,设置仿真时长为2 s,输出功率标准值设为指令值。在0~0.8 s 期间,处于离网模式;在0.8~1.4 s 期间,处于并网模式;在1.4~2.0 s 期间,处于离网模式。图11 为微型逆变器输出的有功功率与标准值的对比,图12 为微电网频率变化曲线。
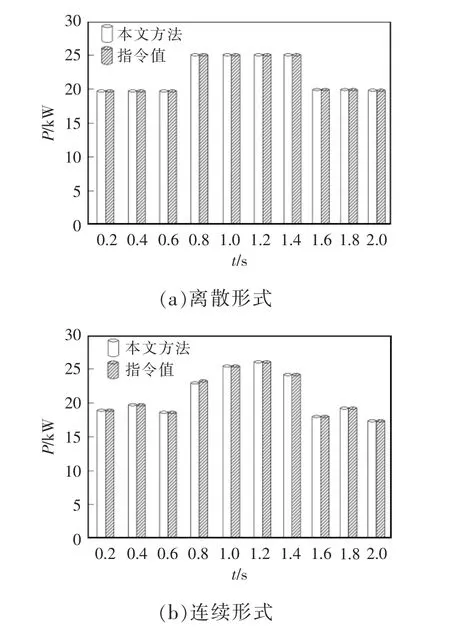
图11 输出有功功率与标准值对比Fig.11 Comparison between output active power and standard value
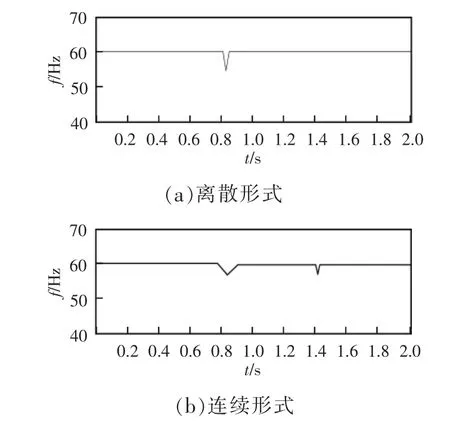
图12 微电网频率变化Fig.12 Frequency variation of microgrid
根据图11 可知,在离网模式运行过程中,本文方法的输出功率和输出功率标准值基本一致;在并网模式运行过程中,本文方法的输出功率能够紧跟功率指令值,完成平滑过渡,缩短调节时间。
根据图12 可知,在0.8 s 时,由离网模式切换至并网模式,微电网频率在短时间内呈现下降的趋势,但依然处于正常范围之内,频率恢复到标准频率的时间较短;在1.4 s 时,由并网模式切换至离网模式,离散形式情况下微电网频率未出现波动,连续形式情况下出现微微波动,原因是本文方法能够针对不同输出功率自由切换控制方法,实现多微型逆变器微电网频率暂态稳定控制。实验证明,在切换离网与并网运行模式时,本文方法能够有效控制多微型逆变器微电网频率的暂态稳定,提升微电网频率暂态稳定控制的准确性,缩短调节时间。
2.3 电压同步控制器性能分析
根据本文设计的2 种模式下的电压同步控制器1 和2,分别测试其对电压的控制效果,得出的仿真实验波形如图13 所示。
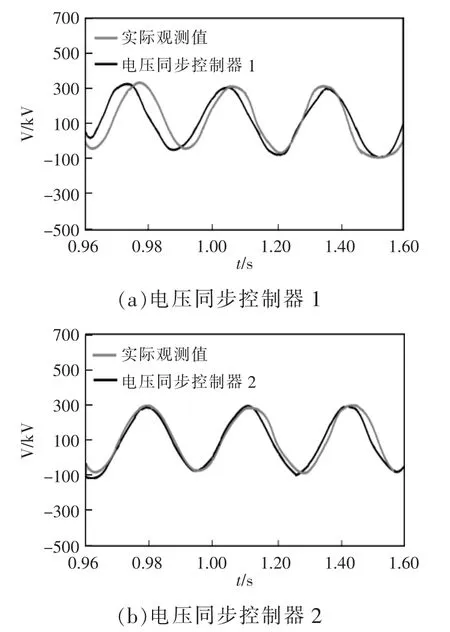
图13 电压波形Fig.13 Voltage waveforms
分析图13 可知,本文设计的电压同步控制器控制的稳态波形质量较高且波形平稳,与实际观测值拟合程度较好,有效避免了更换控制方法时输出电压出现畸变的情况,控制能力较强。
3 结语
虚拟同步发电机使微型逆变器存在同步发电机的工作特征,对微电网起到支撑作用,增强微电网运行的稳定性,结合虚拟同步发电机控制方法与改进下垂控制方法,研究多微型逆变器微电网频率暂态稳定综合控制。所研究综合控制方法能够有效解决并、离网运行模式切换与多微型逆变器并联问题。以后还需深入研究微型逆变器直流侧分布式电源输出功率随机性与间歇性等特点,抑制功率波动,稳定微电网频率。对不同容量等级微型逆变器的并联优化策略与稳定性分析也可深入研究,提升控制方法的应用范围。
猜你喜欢
大电机技术(2021年5期)2021-11-04
电子制作(2018年14期)2018-08-21
电子测试(2017年23期)2017-04-04
电测与仪表(2015年21期)2015-04-09
电测与仪表(2015年11期)2015-04-09
电力工程技术(2014年5期)2014-03-20
燕山大学学报(2014年2期)2014-03-11
筑路机械与施工机械化(2014年4期)2014-03-01
自动化博览(2014年9期)2014-02-28
自动化博览(2014年4期)2014-02-28