
无人机辅助智能边缘网络技术综述*
2024-02-26 02:23张换然申凌峰任资卓屈凌波
电讯技术 2024年2期
张换然,申凌峰,任资卓,郑 杰,王 宁,,,屈凌波
(1.郑州大学 电气与信息工程学院,郑州 450001;2.中讯邮电咨询设计院有限公司郑州分公司,郑州450007;3.微力智能科技(河南)有限公司,郑州 450014;4.郑州大学产业技术研究院有限公司 河南省智能网络和数据分析国际联合实验室,郑州 450001)
0 引 言
2019年起正式步入商用的5G移动通信技术,通过定义增强移动宽带(Enhanced Mobile Broadband,eMBB)、超高可靠低时延通信(Ultra-reliable &Low-latency Communication,uRLLC)、海量机器类通信(Massive Machine Type Communication,mMTC)三大基本场景和智能化的网络切片技术,将通信从人与人连接的时代带入到万物互联(Internet of Everything,IoE)时代,进而推动了泛在通信、计算、控制能力有机融合,为人类社会的智能化变革开辟了全新的范式。
随着5G赋能数字化转型与智能化升级的推进,5G泛在网络覆盖不足、基础设施智能化水平不高等问题凸显,5G在实现“全球全域”“万物互联”上仍存在短板[1]。6G移动通信技术将在5G基础上,通过系统能力提升和ICT(Information and Communications Technology)技术的深度融合,实现万物互联到万物智联的跃迁。“空-天-地”一体化多接入能力、“通-感-算”一体化融合服务能力和“云-边-端”一体化协同计算能力,将成为6G的核心关键能力。6G将以高性能泛在承载网络为基础,通过构建具备智能边缘网络特点的泛在无线接入网,实现资源的高效融合,以连接泛在、感知泛在、智能泛在的网络[2]为远程全息、数字孪生、扩展现实(Extended Reality,XR)、元宇宙等未来服务应用提供信息基础设施支持[3]。
无人机(Unmanned Aerial Vehicle,UAV)凭借其机动灵活性强、适用范围广、功能多元化、部署成本低等特点,近年来广泛应用于通信、遥感、巡检、侦察、监测、救灾等民用和军事领域。在6G“空-天-地-海”一体化多接入的新一代移动网络架构中,无人机是空基平台的重要载体。无人机辅助通信作为地面蜂窝移动通信网络的有效补充,可快速灵活地实现远程控制、通信增强、大规模立体式覆盖和快速应急响应等功能的部署[4]。围绕无人机平台部署、整合并优化各网络节点的通、感、算能力,形成无人机辅助智能边缘网络(Intelligent Edge Network,IEN),是实现机动灵活的万物智联、泛在智能的有效手段[5]。
本文围绕无人机作为空基通信平台的核心功能,首先简述无人机的主要应用场景,并结合未来6G空天地海一体化和以用户为中心的网络架构,讨论无人机在构建无线接入网的泛在化智能化演进——智能边缘网络中的重要作用;其次,结合无人机在不同场景下的通、感、算能力特点,介绍无人机自组网、无人机通信感知一体化、无人机边缘计算等无人机辅助智能边缘网络关键技术;最后,探讨无人机通信信道建模、三维立体部署与路径规划、携能有限与续航问题、无人机网络安全、无人机集群异构网络融合等无人机辅助智能边缘网络技术发展面临的核心技术挑战及潜在研究方向。
1 无人机辅助智能边缘网络架构
1.1 无人机平台主要功能及应用场景
无人机是搭建信息服务空中平台的重要工具。通过搭载具备不同能力的载荷,无人机可以承担通信、遥感、存储、计算等不同的信息系统功能。根据无人机在陆地无线接入网和智能边缘无线网络中承担的角色不同,无人机的主要功能和应用场景归纳为以下两大方面。
1.1.1 无人机在传统陆地无线通信网络中的功能和应用场景
传统陆地无线通信网络中,无人机平台主要作为地基网络基础设施的有效补充,承担无线接入网通信任务,利用其快速灵活部署的特点,搭载空中基站或中继站改善网络通信性能。
1)无人机空中基站。无人机作为灵活可靠的补充覆盖方案,可有效解决地面基站分布与业务需求不一致的矛盾。典型应用场景包括:在偏远地区机动灵活部署以改善蜂窝移动网络边缘覆盖水平;在流量需求激增、地面基站无法承载用户接入的区域(如大型赛事、演唱会等),满足临时高速无线接入需求;在突发受灾地区快速部署,提供可靠的应急通信[6〗。
2)无人机移动中继。通过对无线信号的中继转发,可实现已有地面基站覆盖范围的延伸。特别是目标覆盖区被遮挡、地基基站信号被阻断时,可将无人机灵活部署在最有利的位置对信号进行中继转发,从而以最少的部署时间和成本显著改善弱覆盖区域或覆盖盲区链路性能。
1.1.2 无人机在智能边缘网络中的功能和应用场景
在面向万物智联的新一代移动网络中,无线接入网承担的不再是单纯的通信功能,在感知能力和算力的加持下,将演进为具有“通-感-算”融合服务能力的智能边缘网络,成为泛在智能网络的“周围神经系统”。无人机平台一方面可凭借其机动灵活特点,更好地服务于以用户为中心的全新业务范式;另一方面,通过构建空天地一体化多接入网络,在各网元间建立机动灵活的信息通道,为智能边缘网络通、感、算资源的优化配置与融合提供信息交互承载。智能边缘网络中的无人机,在不同载荷赋能下,可实现数据采集、智能监测、边缘缓存、边缘计算、电能无线投放等多样化的功能。
1)无人机数据采集。与传统数据采集方式相比,无人机能够以更灵活的方式和更高的效率完成广域数据采集[7]。智慧城市、智慧水利等应用中,需要从数量大、分布广的物联网类装置采集汇总数据,通过部署无人机(群)并合理规划航迹,可以周期性突发的方式实现数据的低成本高效采集。
2)无人机智能监测与巡检。利用机载传感器,无人机可实现高精度地理信息数据的获取,并进而结合地理信息数据执行环境监测、智能巡检、辅助执法等任务[8],如对分布在偏僻山区的高压电力线路进行巡检、对野外高铁沿线安全隐患进行排查、对秸秆焚烧等环境事件进行监测、对城市道路交通违规违停情况进行智能监测与处罚等,更多功能如表1所示。
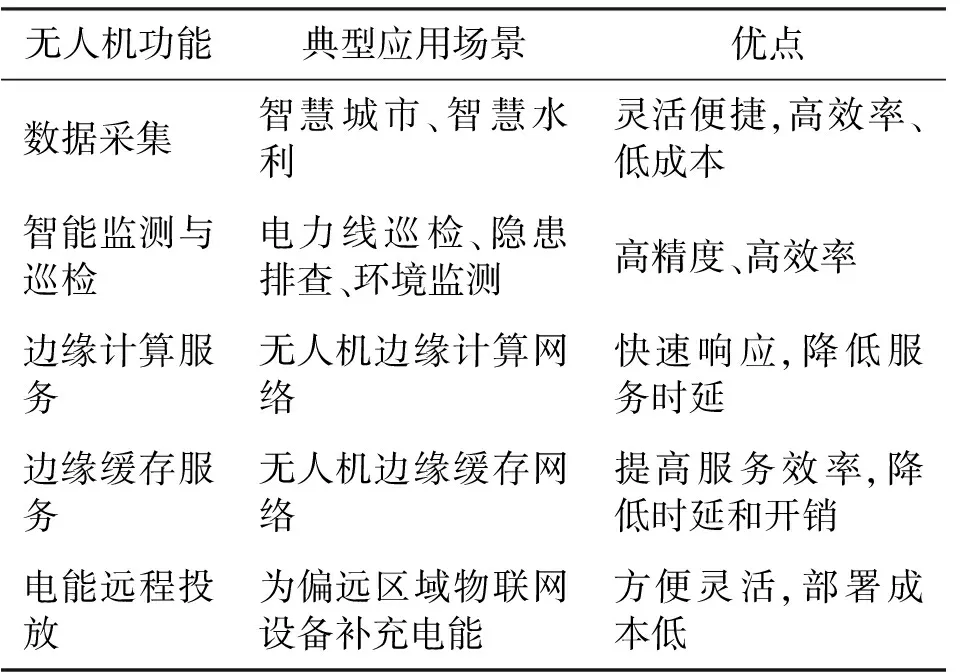
表1 智能边缘网络中的新型无人机节点功能
3)无人机辅助边缘计算。一方面无人机可通过辅助建立高性能通信链路,协助用户将计算任务卸载至基站端边缘服务器执行,另一方面无人机平台也可搭载边缘服务器,直接为用户提供计算卸载服务,实现更快速的服务响应。
4)无人机边缘缓存。边缘网络通过预测并主动缓存流行度高的内容,可避免重复传输、降低时延,有效提高服务效率。无人机平台的机动灵活特点,使得在无人机上部署的边缘缓存可进一步靠近用户,以更低的通信开销和更高的效率实现以用户为中心的服务与内容分发。
5)无人机辅助电能远程投放。无人机平台可搭载无线携能传输(Wireless Power Transfer,WPT)系统,周期性向部署在偏远位置、没有稳定电力供给的物联网设备进行电能的远程投放,为其补充电能储备,可有效提高物联网节点的生存时间和网络鲁棒性。
1.2 空天地海一体化网络架构中的无人机辅助智能边缘网络
为实现全球无缝覆盖愿景,6G将构建空天地海一体化移动网络。通过深度融合天基、空基、地基、海基网络能力,充分发挥各子网络在不同空间维度上的独特优势,实现各独立子网络之间的智能互通和广域无缝立体覆盖。
空天地海一体化网络的基本架构如图1所示。其中地基网络作为基础,天基和海基网络作为延伸,空基网络作为衔接和补充,覆盖范围将包括天空、地面、海洋、太空等,可满足处于不同空间场景中用户的业务需求[4]。其中,天基网络由多种卫星系统构成;空基网络由高空平台(飞艇、热气球等)和低空平台(无人机自组织网)组成;地基网络由地面蜂窝网络和物联网设备等网元组成;海基网络包括了沿岸基站、海面船舶和海下作业设备等。无人机作为空基网络的重要组成单元,发挥了不可或缺的中间纽带作用。
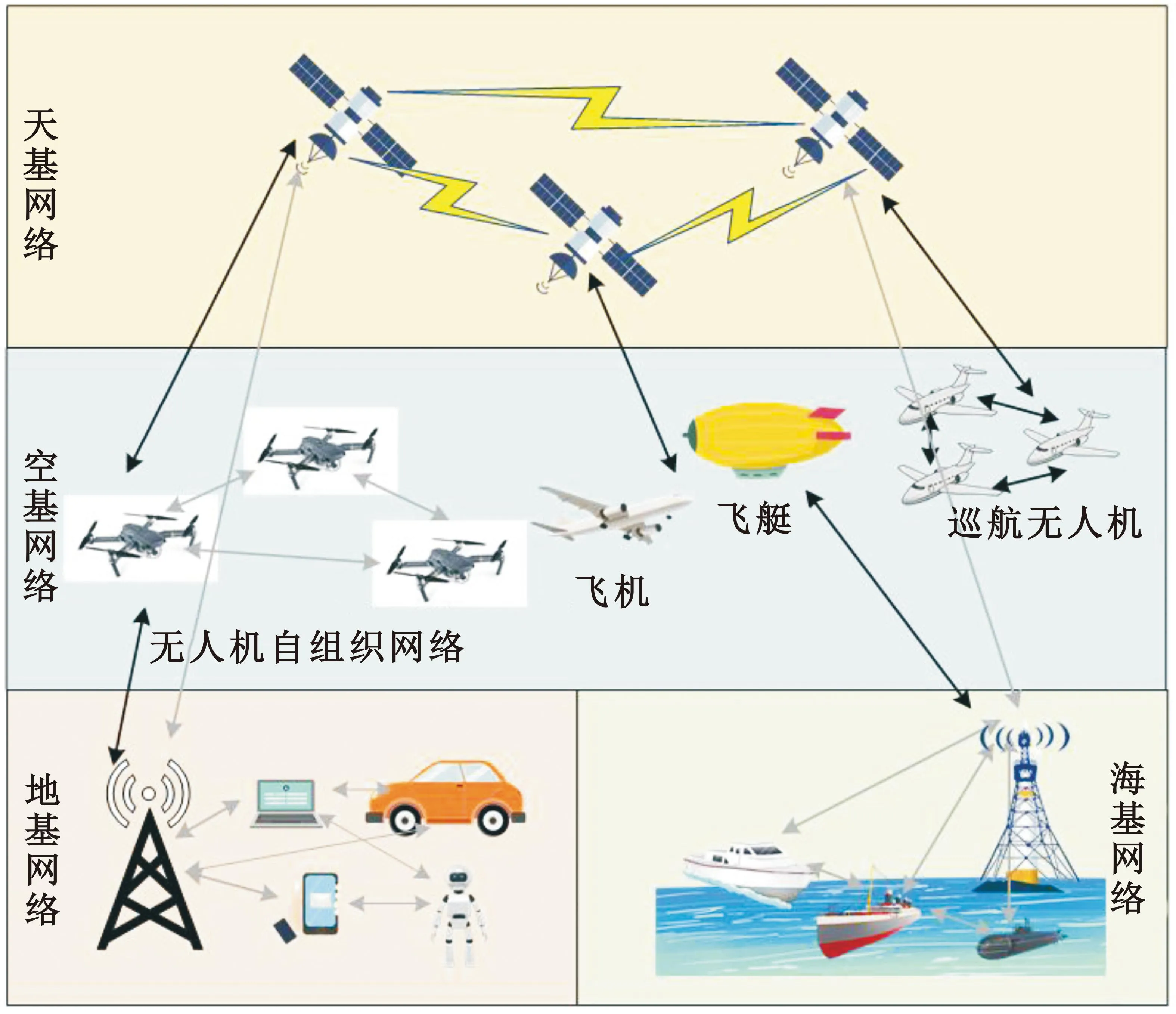
图1 空天地海一体化网络架构
通过无人机平台这个中间环节的调节,通、感、算资源和任务得以在空天地海一体化网络中更高效地流动和配置。通过多维感知与计算手段的综合应用,可实现多元网络的“通-感-算”一体化融合,使其成为高度灵活且具有一定程度自主性和内生动态编排能力的智能化网络,为每位用户提供针对性的定制服务。具体而言,智能边缘网络可通过对网络、业务和用户数据的自主学习,实现以服务用户为中心的无人机自主管理和飞行轨迹控制目标。
2 无人机辅助智能边缘网络关键技术
本节将从技术背景、基本原理、基本特点及应用场景等方面,以小型无人机为例,对无人机辅助智能边缘网络的关键技术进行介绍,包括无人机动态组网、无人机通信感知一体化、无人机辅助高频段通信、无人机边缘计算。
2.1 无人机自组网
无人机自组网是由多架无人机搭载相同或不同载荷,共同完成任务的无人机网络,是无人机集群应用的基础[9]。与单无人机相比,无人机自组网作为一个有机整体,扩展了其工作任务维度、提高了工作效率。其特点是无人机节点移动速度快、不受地形限制、可以自由入网或退出,组网方式十分灵活。由于无人机飞行速度快,无人机之间的链路并不稳定,需要选择适应无人机组网特点的路由协议,现有的面向无人机自组网的路由协议可分为基于拓扑、基于地理信息和基于分层的路由协议。常用的路由协议包括:优化链路状态路由协议(Optimized Link State Routing,OLSR)、贪婪周边无状态路由(Greedy Perimeter Stateless Routing,GPSR)、强化学习(Reinforcement Learning,RL)路由等[10]。此外,无人机可根据业务需求采用多样化组网结构,如通过网状结构组网可增强系统抗毁性。
无人机自组网的核心技术包括无人机调度与资源分配、三维立体部署和路径规划、网络智能管理等。无人机调度是在资源受限的约束下,根据任务的优先级对无人机的服务用户和范围进行合理划分与编排。当完成任务划分后,无人机集群飞往目的区域,飞行过程中对无人机进行路径规划和三维立体部署。无人机组网完成后,针对无人机集群的智能管理,需要分别设计资源智能分配策略、网间工作信息交互策略等。以上步骤可独立完成也可联合设计,可根据实际应用场景采用不同的组网和优化策略。
多无人机协作完成任务时,无人机协同系统应该具备可靠性高、鲁棒性强的特点,可以采用集中式或分布式的协同结构,常采用的协同控制方法可分为一致性控制、编队控制、合围控制和跟踪控制等。
无人机网络响应速度快、配置方式灵活、观测范围广、数据处理能力强,可进行多元信息感知、实现复杂的网络功能,承担灾情遥感、海洋观测等复杂任务,在未来将得到更广泛的应用。
2.2 通信感知一体化
随着无线频谱资源愈发稀缺,在单一装置中实现不同功能对同一频段频谱的复用,可有效节约频谱资源,是无线通信技术研究的一个重要方向。通信感知一体化,是感知与通信功能协同的新型信息处理技术,通过软硬件资源共享或信息共享,同时实现感知与通信功能[11]。首先,由于通信系统与雷达在硬件组成和信号处理等方面具有相似之处,两者融合可降低系统综合成本。其次,通信系统与感知系统联合设计可以实现互惠共生、相互增益。一方面,通过复用通信系统的频谱、硬件或信号处理模块,可同时实现多种类型的感知功能;另一方面,感知结果可为通信系统提供环境信息,辅助通信接入或管理,提高通信服务质量。在智能边缘网络中实现通信感知一体化,将作为一项基本能力赋能未来泛在智能网络及各类新型垂直应用,通过赋予网络“看”得见物理世界的能力,将数字世界和物理世界连通。
无人机辅助通信感知一体化,可以进一步提升系统感知和通信性能,并且实现广域灵活覆盖。例如,在无人机辅助智慧交通场景中,通信感知一体化技术可用于获取道路高清地图、辅助自动驾驶和道路监管等。
1) 高清地图采集。用无人机平台搭载的激光雷达、摄像头、传感器和全球定位系统,实现以用户为中心的环境信息感知。感知结果经智能边缘网络处理后直接发送给车辆,无需经过核心网,降低了时延,满足自动驾驶中高清地图和路况低时延实时传输的需要。
2) 无人机辅助自动驾驶。利用无人机搭载基站进行通信与感知,其高视角可以扩大通信和感知范围、减小遮挡盲区,为自动驾驶提供超视距传输,提高了自动驾驶的安全性和智能性。
3) 道路监管。依托于无人机飞行速度快、活动范围广的优势,利用无人机平台搭载通感一体化技术,仅通过低成本、低密度的无人机部署,即可实现广域感知。
无人机通感一体化系统还可用于空域感知的管理,借助超大规模天线阵列和智能反射面等技术提供的超高空间感知分辨率,同时实现雷达探测监控和关键信息传输的功能,可广泛用于民用和军事领域。
2.3 无人机辅助高频段通信
随着人工智能(Artificial Intelligence,AI)、虚拟现实(Virtual Reality,VR)/扩展现实(Extended Reality,XR)以及未来数字孪生、元宇宙等新型应用的不断发展,对网络峰值速率和吞吐量的需求激增,传统6 GHz以下的无线频谱资源已无法满足未来移动通信对带宽和速率的要求。毫米波通信作为5G一项重要的基础性关键技术,将移动通信带入高频段时代。为进一步提升远程全息、XR等未来应用的用户体验,实现更大通信容量、更高传输速率和更低服务时延,太赫兹作为6G关键使能技术之一,将进一步探索更高频段通信的应用潜能。
毫米波频率为30~300 GHz,太赫兹频段位于0.1~10 THz。与传统移动通信采用的6 GHz以下频段相比,高频段通信的主要优点包括:具备充足的带宽,可实现极高传输速率,且丰富的频谱资源还为跳频、扩频技术的实现提供了保障,提升了系统抗干扰性能;波束窄,传播方向性好,抗干扰能力强;波长短,可采用小型化的天线和器件,利于大规模集成。
在未来智能边缘网络中,无人机与高频段通信可实现相互赋能、相互增益。一方面,高频段无线信号传播损耗大,仅可进行视距通信,借助无人机中继,可实现高频段信号的远距离传输[12];另一方面,高频段信号波束窄、方向性好,可弥补无人机广播信道安全性的不足[13];此外,高频段信号频率高、波长短,天线和射频器件集成度高,在无人机狭小的空间内能集成超大规模天线阵列,结合超大规模MIMO等技术可进一步提升网络容量。
无人机辅助高频段通信与其他关键技术融合,还可实现更加丰富的应用,如无人机太赫兹通感一体化系统可实现空中厘米级高精度定位[14];部署太赫兹无人机基站可为实时流媒体或点播应用提供无缝高速连接,并降低附近地面基站的负荷[15]。
2.4 无人机辅助移动边缘计算
视频流媒体、智慧交通、VR/XR等新兴应用的发展,对于无线网络的时延、可靠性、鲁棒性提出了更为严苛的要求。传统依赖核心网云计算的服务时延较大,还可能面临网络拥塞问题。移动边缘计算(Mobile Edge Computing,MEC)将算力下沉至网络边缘,可降低网络拥塞、缓解带宽压力、提高数据处理效率,实现计算和存储资源的弹性利用,提升用户体验。但在城市人口密集地区、偏远山区、地表受灾地区等特殊区域,以基站为载体部署MEC的成本高,时效性差,性价比低,往往无法提供有效的泛在边缘计算服务。
无人机平台一方面可作为通信节点,通过中继的方式将用户的计算服务卸载至基站处的MEC服务器;另一方面,也可搭载MEC服务器,形成无人机边缘计算网络,作为地面MEC网络的补充,提供泛在的边缘计算服务。图2所示为典型的无人机辅助移动边缘计算网络,通过软件定义网络(Sofewart Defined Network,SDN)控制器实现对无人机集群控制、计算资源分配及轨迹优化,可以为突发状况导致地面局部网络负载过大、灾后地面基础设施受损等场景,提供计算卸载、内容缓存等服务。此外,无人机平台的机动灵活特点,使无人机可进一步靠近用户,从而以更高的效率为用户提供上述服务。
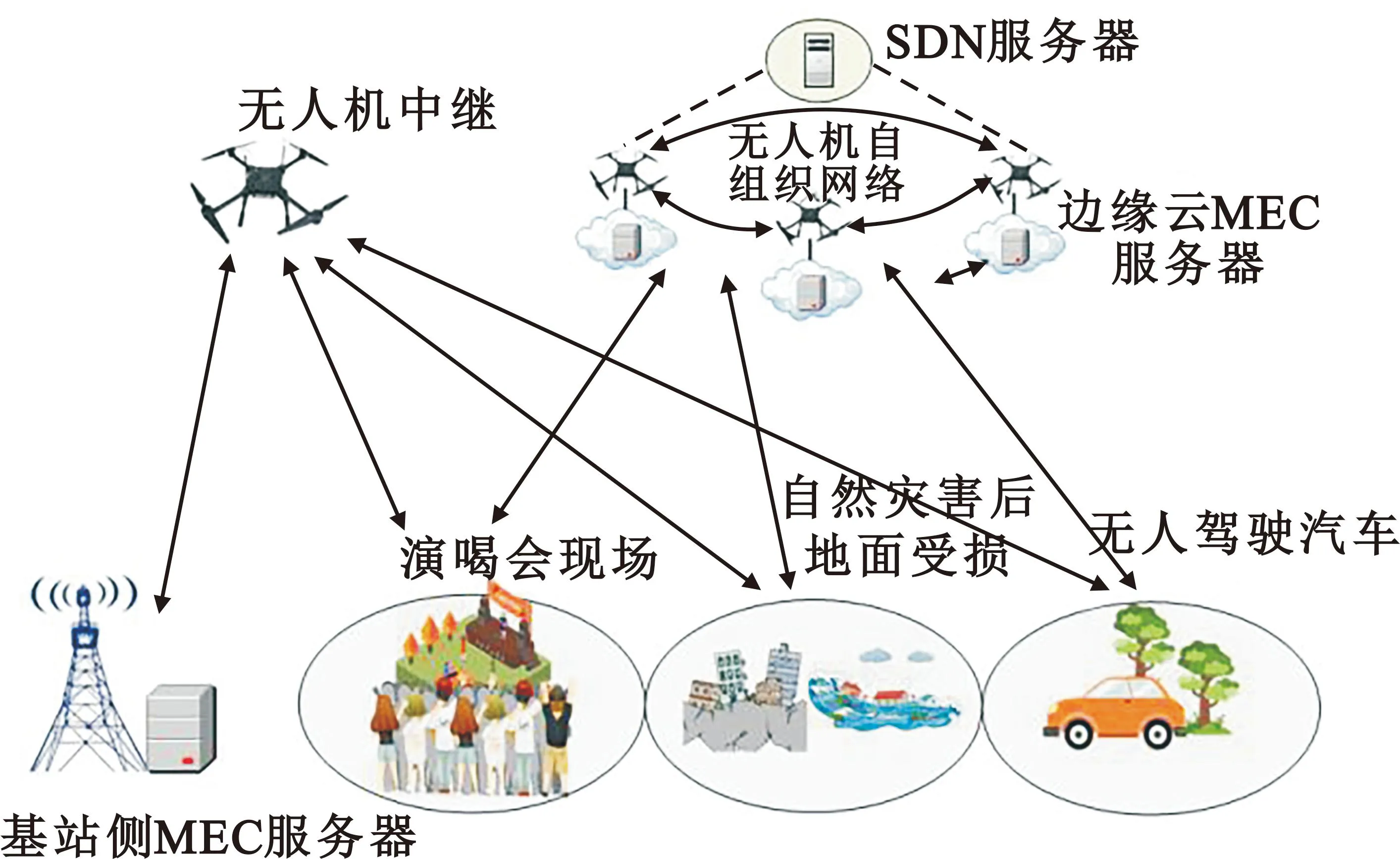
图2 无人机辅助的移动边缘计算网络
3 技术挑战与潜在研究方向
如前所述,在未来智能边缘网络中,无人机将凭借其灵活部署特性,通过与前沿通、感、算技术相结合,实现越来越丰富的功能、承担越来越重要的任务。但是,在无人机平台应用某些技术时,会面临新的技术挑战和科学问题。本节面向无人机辅助智能边缘网络技术,探讨其在发展演进中面临的关键技术挑战和潜在研究方向,包括无人机信道建模、三维立体部署和路径规划、能效优化、安全问题以及无人机集群异构网络融合等。
3.1 无人机信道建模
无人机信道建模是研究无人机通信性能的理论基础。无人机网络中空-空信道用于无人机间的通信,主要由视距链路组成;空-地信道用于无人机与地面用户间的通信,其间存在复杂且具有动态多变特性的障碍物。由于无人机网络中节点间的相对快速移动会引入显著的多普勒频移,无人机信道往往具有快时变和非平稳性[16]。
现有的无人机信道模型包括基于实测数据的模型[17]、基于射线跟踪的模型[18]、基于几何分布的模型[19]等,在准确刻画无人机通信信道状态方面仍存在不足,尤其是无人机高频通信场景下,无法精准描述毫米波和太赫兹频段信号的传播特性以及三维快时变场景的非平稳特性。此外,现有模型大多忽略了无人机飞行速度、飞行姿态等对信道特性的影响,以及无人机特有的大范围三维散射空间传播特性。
特别是无人机搭载智能反射面(Reconfigurable Intelligent Surface RIS),作为无人机辅助无线接入网研究中一个典型且突出的热点,在信道建模方面面临诸多挑战。
1)与传统信道建模相比,RIS利用反射单元重构无线传播环境,信道变为级联信道,该级联信道受天线数目和反射单元的共同影响,多径因素变得更复杂,尤其是散射情况异常复杂。
2)RIS的引入导致信道估计复杂度大幅度提高,如何分别估计用户到无人机RIS和RIS到基站的信道矩阵是目前研究的难点[20]。
3)反射单元会改变传输信号的幅度和相位,近场和远场条件下RIS信道特性有显著区别,需要根据具体场景分别研究。
4)RIS本身属于无源器件,不能进行信道估计,改造RIS做信道估计会带来额外的复杂度并牺牲RIS本身的一些性能。
未来无人机通信信道建模的研究中,可引入机器学习方法辅助建模,提升建模效率和准确性[21]。此外,采用大规模天线阵列传输高频信号将形成极窄的波束,但窄波束指向性对收发端的快速移动异常敏感,因此需要将三维波束跟踪与信道建模结合,建立更精准的信道模型。
3.2 三维立体部署和路径规划
无人机三维立体部署和路径规划是无人机有效利用其灵活动态特性改善系统通信性能的基础。无人机的空间移动性在为无人机通信系统设计带来新自由度的同时,也带来了新的技术挑战。在无人机三维部署和路径规划问题中,利用无人机高移动性的同时,需要考虑其携能有限以及容量约束等约束条件[22],这导致优化问题异常复杂,提高了优化无人机部署和飞行策略的难度。
在建立的原始优化问题具有非凸耦合特性的情况下,无人机三维空间部署优化问题的常用解法是将问题解耦为二维平面部署和水平高度优化两个子问题进行近似求解[23]。而信道模型精确性不足,使得相应的优化结果可能进一步偏离真实的全局最优。尤其对于无人机辅助高频段通信场景,对高频段空地信道模型研究的不足也影响着优化部署问题的有效解决。
其次,当前无人机位置部署和路径规划的研究中,一般都将时间或空间位置离散化后进行优化,但离散化的程度与复杂度之间存在取舍折中问题。离散化粒度越细,越接近实际情况,则优化所得结果越接近真实全局最优,但随之而来的问题是算法复杂度高、实际应用效果差,对时延敏感型应用不友好。在解决具体问题时,需要平衡好模型精度(离散化程度)与算法复杂度之间的关系。
再次,在无人机轨迹优化问题中,一般都将无人机视为一个理想的点,而不考虑无人机的大小、重量、飞行姿态等,导致规划好的路径在实际执行时,不能理想实现规划效果。在未来的无人机路径规划研究中,若能将无人机尺寸、重量、飞行姿态等因素影响纳入建模的考虑范围内,可提高理论研究模型与真实系统情况的匹配度。
此外,目前大部分研究工作采用的地面基站和用户分布模型假设较为理想化,未充分考虑地面用户的动态性,对多个地面基站的场景考虑也不充分。在未来的研究中,采用更贴近实际情况的建模,能够使理论研究成果具有更强的实践指导意义。
3.3 无人机能效优化问题
受无人机尺寸以及重量的制约,实际应用中无人机具有典型的携能有限特点。无人机的续航能力决定了其工作时长,大多数消费级无人机在理想工况下的续航时长为30 min左右,为了使无人机能长时间持续工作,确保智能边缘网络服务不间断,提高无人机续航能力/节点生存性非常关键。
影响无人机续航时间的因素主要包括无人机的重量、飞行速度、飞行状态(爬升、下降、翻转等)、电池容量等。现有的关于提高无人机续航能力的研究,主要包括提高无人机携能和降低无人机的能耗、提高能效两个方面。
提高无人机携能的方法主要有:
1)使用更高能量密度的电池。可在维持原电池体积小、重量轻的前提下提高电池容量,但受限于电池制造技术发展缓慢,短期内较难实现突破。
2)地面基础设施对无人机进行无线充电。目前大多数无人机仅支持有线充电,极大限制了无人机部署的机动性。对无人机无线充电方式的研究有待进一步完善并实现。
3)采用能量收集技术。从环境中提取光能、动能、射频能量将其转化为电能。但此类背景能量收集系统的能量收集速率普遍很慢,难以满足无人机高功耗的要求。
从通信的角度讲,能效优化研究更多侧重于减少无人机能量消耗。比如各种基于节能的优化算法研究,包括飞行轨迹、部署策略、数据收集优化算法研究。此外,通过优化无人机整备质量,采用更轻的材质架构,减少无人机冗余配件,使用集成度更高的通信硬件(如通感一体化设备)等,也可有效提升无人机能效水平,改善续航能力[24]。
3.4 无人机网络安全问题
无人机通信具有节点运动速度快、通道切换频繁、能量有限、开放式环境等特点,其通信链路、控制命令、传输数据都存在泄露的风险[25]。无人机网络安全包括保证数据的安全与保证无人机网络功能正常实现、系统可正常运转等。
在现有的研究中,提升无人机通信安全的措施主要包括三个方面:一是从上层协议的安全设计出发,对无人机及传输数据进行认证,或采用安全路由协议[26];二是采用保密性强的物理层技术,比如跳频、扩频等提高无人机抗干扰和保密传输能力[27],或利用毫米波、太赫兹频段形成三维超窄波束提高传输安全性[28];三是采用物理层安全技术,通过联合优化无人机飞行轨迹和资源分配来提升系统保密传输速率/吞吐量,或通过加入人工噪声的方法对窃听者进行干扰阻塞[29]。
设计无人机网络安全策略时,需要考虑资源消耗与安全性的平衡。通常情况下采取的方法越复杂,保密性能越好,但加密、解密、数据交互、安全验证等方面需要调动许多的计算资源,而无人机相关应用更倾向于采用轻量级的协议和算法,实现可行的复杂度、尽可能小的能耗和较高的安全性能。如何在安全和能效间实现最优折中,仍是未来需要着重研究的方向。
3.5 无人机集群异构网络融合
“万物智联”这一6G愿景的实现需要依赖空天地海一体化的网络架构,异构网络高效融合是这一愿景实现的重要前提。例如,无人机辅助自动驾驶功能的实现,需要卫星网、车联网、地面移动通信网、无人机集群网等的高效协同。异构网络融合技术能扩大网络总体覆盖范围,使网络具有更好的扩展性,为新型服务的产生创造了条件,能更好地满足用户的多样性需求。
但是,无人机集群网络在网络融合方面存在困难。首先,由于无人机集群网络拓扑结构多变,传统的基于节点位置的IP体制与基于内容的ICN体制在无人机网络中都难以实现高效组网,无人机组网需采用定制化设计,为网络融合设置了障碍。其次,要考虑如何设计出复杂度低、灵活性高的异构网络切换算法,还要设计出相应的无线资源管理方法,包括频谱管理、用户接入权限、信道编码方法等。此外,不同业务QoS需求、异构网络网间安全策略等,也需要更进一步的深入研究。
猜你喜欢
中国传媒大学学报(自然科学版)(2021年1期)2021-06-09
地震研究(2021年1期)2021-04-13
通信产业报(2016年44期)2017-03-13
CHIP新电脑(2016年3期)2016-03-10
北京信息科技大学学报(自然科学版)(2016年5期)2016-02-27
华东理工大学学报(自然科学版)(2015年4期)2015-12-01
电子设计工程(2015年8期)2015-02-27
现代防御技术(2014年6期)2014-02-28
测绘科学与工程(2014年1期)2014-02-27
雕塑(1999年2期)1999-06-28
