
大规模无人机集群通信定位一体化技术
2024-02-24 01:54:04樊邦奎刘德康张瑞雨唐家玮
信号处理 2024年1期
樊邦奎 刘德康 张瑞雨 唐家玮,3 常 添,4
(1.智能协同感知与分析认知实验室,北京 100094;2.中国工程院,北京 100088;3.北京航空航天大学电子信息工程学院,北京 100083;4.北京理工大学信息与电子学院,北京 100081)
1 引言
无人机是一种具备自主控制能力的飞行器,可搭载不同载荷,执行多种任务,且能重复使用。其低成本、低损耗、零伤亡,及高机动性、隐蔽性、灵活性等特点,使其在军事、民用和科学研究等诸多领域得到广泛应用[1-3]。近些年来,随着无人机技术的飞速发展,由多架无人机组成的无人机集群逐渐进入人们的视野。无人机集群通过协同感知、信息共享和分工协调完成各类复杂任务,具备高度的智慧性和自主性[4],具有功能的多样性、群体的抗毁性、成本的低廉性、编队的灵活性四个优势,而完成这些任务依赖于集群内部准确的定位[5]。目前,无人机集群正朝向包含成百上千架无人机的大规模无人机集群方向发展。
对于大规模无人机集群而言,单一定位手段或定位系统在覆盖范围、部署成本、定位精度、载荷重量和功耗等方面难以同时满足高精度可靠定位需求。卫星导航系统和惯性导航系统的航迹推算定位技术是目前常用的定位手段。然而,当无人机集群处于室内、地下通道等环境时,卫星导航信号较弱,无人机定位精度恶化。MEMS 惯性导航设备虽然尺寸小、成本低,但是累积误差较大,也无法为无人机集群提供连续、可靠的高精度定位导航服务,更无法满足集群内部高精度相对定位要求。
近年来,基于无线电测距与惯性导航结合的无人机协同定位技术因其低成本、低能源消耗以及高定位精度的优势,引起了广泛关注[6]。一方面,无人机集群通过机载无线电测距设备实现机间测距,形成机间测距网络,在此基础上实现无人机集群相对定位。然而,依靠无人机测距网络只能实现无人机集群的相对定位,缺乏大地坐标系下的全局坐标信息,缺少相对方向信息。此外,无人机测距网络的更新周期较长,难以满足大动态条件下的无人机定位需求。另一方面,无人机通常搭载多种惯性导航设备,包括加速度计、陀螺仪等,无人机可以通过惯性导航系统实时地推算当前位置信息。然而,机载低成本MEMS 惯导系统通常性能较差,受时钟偏差、温漂等影响,长时间累积误差较大,无法满足无人机集群长时间稳定工作的要求。因此,将MEMS惯性导航系统与机间测距网络相结合,有助于弥补彼此的缺陷。通过数据链传输无人机机间测距信息与惯性导航设备估计的位置信息,利用多源数据融合方法,可以提高无人机集群导航定位精度。
基于无线电的无人机机间测距技术因其不受外界环境影响、精度高和抗干扰能力强等优势,已被广泛应用于无人机定位系统上[7]。根据无线电种类的不同,该技术可分为基于超宽带(Ultrawide Band,UWB)和基于Wi-Fi 信号的定位技术等[8-9]。Wi-Fi 是目前使用最为广泛的商用无线网络,已经有许多利用Wi-Fi实现无人机定位的相关研究。文献[10]利用跳频技术来模拟宽带信号以增大Wi-Fi信号的带宽从而实现高精度测距,在视距环境下和非视距环境下的测距中位数误差分别为65 cm 和98 cm。然而,由于跳频系统的引入,该系统功耗较高;同时受信道脉冲响应影响,该系统在较为恶劣的非视距环境下无法使用。文献[11]在Wi-Fi 设备上使用TDOA 技术实现了室外0.23 m 和室内1.5 m的定位精度,然而该技术需要大量的节点参与才能实现该精度。基于UWB 的无人机定位技术具有高精度、抗干扰强的特点,通常能够提供亚米级的定位精度,然而其传播距离短,不适用于大范围无人机集群定位场景。文献[12]针对时钟偏差下基于UWB 的无人机定位同步问题进行了分析,提出了一个联立优化算法,在仿真结果中达到了CRLB界。此外,文献[13]研究了锚点参与下无人机的定位问题,使用UWB 实现无人机和锚点间的测距,利用机器学习实现信道估计,在室内环境下实现了0.21 m的定位误差。然而无论是Wi-Fi还是UWB 的方案,都存在工作距离近、测距更新周期长、节点数受限等问题。
无人机机载的MEMS 惯性导航系统可以为无人机提供实时位姿信息,该技术通常与基于无线电的定位系统协作以提高无人机定位精度。典型的与惯性导航结合的算法包括基于扩展卡尔曼滤波(Extended Kalman Filter,EKF)的定位算法、置信传播(Belief Propagation,BP)算法等[14]。其中基于EKF 的定位算法具有复杂度低的特点,对于移动中的无人机依然可以提供较好的定位估计结果。但是EKF 本质上是将非线性的无人机定位模型近似为一个线性的无人机定位模型,这种近似不可避免的降低了无人机定位精度[15-16]。以无迹卡尔曼滤波(Unscented Kalman Filter,UKF)为代表的改进算法利用一个非线性的转化来近似无人机的非线性运动模型,能够获得更好的定位精度,但是在复杂度上要求更高[17]。置信传播算法,例如非参数置信传播(Nonparametric Belief Propagation,NBP)算法、和积算法(sum-product algorithm)等可以为无人机集群提供一个高精度的定位结果,但是其计算量巨大,且不适用于运动中的无人机集群场景,因此通常与EKF结合使用[18-19]。
受上述工作的启发,本文面向卫星导航拒止场景,针对大规模无人机集群当中的MEMS惯性导航精度受限问题,通过融合测距信息和MEMS惯导信息,实现全信息的融合定位方法,改善无人机集群内部的相对定位精度。本文首先构建了无人机集群的惯导定位模型和通信信号模型,基于最大后验概率方法提出了全信息融合定位优化问题。其次,基于系统模型,本文分别推导了延迟估计和距离估计的CRLB,并结合惯导定位模型,推导了融合定位问题的理论性能极限。然后,本文给出了基于距离估计的全信息融合定位方法,提出了高精度测距辅助下的最优线性融合方法,并分析了融合定位的性能提升程度。最后,本文通过数值仿真验证相关结论。
2 系统模型
一个典型的无人机集群系统如图1 所示,其中每一架无人机利用MEMS 惯性导航定位设备进行航位推算,得到无人机当前位置。无人机之间利用通信信号实现相对测距,通过机间测距结果改善集群定位性能。
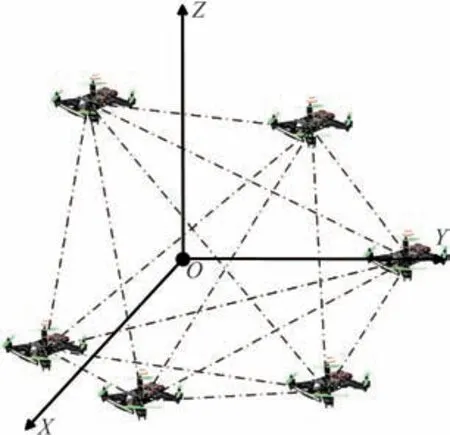
图1 无人机集群示意图Fig.1 UAV swarm diagram
考虑一个包含N架无人机的无人机集群,第i架无人机的位置真值记为qi,第i架无人机的惯导定位误差记为ϵi,定位误差服从协方差矩阵为Σi的零均值高斯分布。因此,惯性导航定位结果pi可以表示为
无人机之间通过OFDM 信号进行通信,并同时实现测距。信号可以写成如下形式:
信号经历一段延迟后到达接收机,因此,接收信号形式可以表达为
根据接收信号形式,我们可估计传播延迟τ。τij表示i号无人机至j号无人机之间的传输延迟,距离可以写成如下形式
其中,C代表光速,代表测距的误差。我们进一步将测距结果写成矢量形式
于是,距离d与位置q的关系可以记为d=g(q),显然,距离是位置的非线性函数。
利用接收信号进行距离估计,结合惯导定位结果,直接构造基于MAP的融合定位问题
由于接收信号r与惯导定位p相互独立,MAP问题可以重写为
因此,通过求解公式(8)的MAP 问题,就可以得到位置的最优估计。
3 融合定位方法
本节描述利用机间测距改善惯导定位的融合定位方法。
3.1 定位精度分析
根据接收信号形式,可以直接推导延迟估计问题和测距问题的CRLB
通过测距过程,利用测距结果代替接收信号,可以进一步将MAP问题重写为
根据惯导定位模型,不难得到惯导定位问题的似然函数
以测距的CRLB作为测距的协方差矩阵
测距结果的似然函数可以表示如下
利用测距误差和惯导误差的独立性,可以通过测距的CRLB和惯导的CRLB共同推导出定位问题的CRLB
至此,我们给出了融合定位问题的理论极限。
3.2 全信息融合定位方法
根据前面的分析,融合定位问题本质是求解MAP问题。结合公式(11)和公式(13),可以将原问题简化为以下最大似然估计(maximum likelihood estimation,MLE)问题
定义空间中任意两个点qi,qj的距离函数为
因而,根据矢量d的定义,我们有
可以通过多种方法求解该非线性最小二乘问题,例如梯度下降法、牛顿法、LM 法等。利用f(·)函数的偏导数,可以直接构造g(·)函数的偏导数。计算λ(q)的导数J(q)可得
若采用梯度下降法,可以迭代求解
若采用高斯-牛顿法,可以迭代求解
于是,我们给出了全信息融合定位方法。
3.3 高精度测距辅助定位方法
在实际中,MEMS 惯导定位精度随时间快速发散,而测距精度通常保持不变。通过测距解算高精度的相对位置坐标,利用惯导补全缺失的自由度,是一种有效的全信息定位方法。利用测距构建相对坐标的问题,已经有大量文献开展了研究,例如SMACOF 方法,本文在SMACOF 方法基础上,首先利用高精度测距值构建精确相对坐标,然后探讨二者融合的问题。
相对定位问题可以描述为如下MAP问题
在高精度测距条件下,将相对坐标转换至真实坐标,R代表旋转矩阵,t代表平移矢量,第i架无人机的相对定位结果可以表达为如下形式
带入惯导定位模型,我们有
其中,ηi和ϵi分别对应相对位置误差和惯导误差,wi=-Rηi。由于旋转矩阵R是正交矩阵,所以-Rηi和ηi服从相同的零均值高斯分布。又由于惯导误差远大于测距引起的定位误差,且二者相互独立,我们记误差总和wi+ϵi~N(0,Σ)。
依赖测距信息估计的无人机集群相对坐标和惯导绝对坐标系之间存在着旋转和平移的关系,利用坐标变换的方法,将定位问题转换为对R和t的估计问题,利用高斯分布的特性,可以直接给出对应的优化问题
为了求解该问题,对pi-Rzi-t进行变形
于是,原优化问题可以重写为估计矢量参数θ的问题
直接给出该问题的最优解
进而可以得到θopt的协方差矩阵,并同时得到飞机位置的估计值
即利用估计得到的旋转矩阵和平移矢量,对相对定位结果进行变换,即可完成位置估计。即对无人机使用测距信息估计得到的相对坐标矩阵进行旋转和平移,转化为惯导绝对坐标系下的坐标。对于不含噪声的理想惯导,可以利用R和t直接将相对坐标系无误差地转换为绝对坐标系。然而,受惯导误差影响,R矩阵和t矢量也存在估计误差。此时,坐标系转换也会存在误差,这个误差代表了融合定位的精度,也决定了整个集群的全局定位性能。
不妨选取集群重心建立坐标系,考虑无人机的坐标是近似均匀分布的,此时有
可以推导得到,
定位误差可以重写成如下形式
最终,可以得到如下结果
于是融合定位的标准差有如下性质
这表明,随着无人机数量增加,高精度测距可以将惯导定位精度提高倍量级。
4 数值仿真
根据已经建立的无人机集群中惯导定位模型和测距模型,本节通过数值仿真验证前文中的讨论,并评估算法的性能。实验所用的平台均为MATLAB R2022B,CPU 为Intel i7-12700KF,内存为32 GB。在仿真过程中,首先随机生成每一架无人机在空间中的真实坐标,然后在真实坐标的基础上,一方面利用惯导定位的噪声模型产生对应的惯导定位数据,另一方面利用测距模型产生任意两架无人机之间的测距数据。利用含有噪声的惯导数据和测距数据进行数值仿真。并将仿真得到的融合定位结果与无人机的真实坐标进行对比,验证本文算法的有效性。
4.1 CRLB仿真
本小节针对融合定位的CRLB通过计算机仿真验证通信测距对于无人机集群导航定位性能的提升效果。无人机集群中的无人机数量为10~100架,惯性导航的定位标准差记为σimu,取值为0.1 m、1 m和10 m,分别代表3 种不同水平惯导器件的精度。通信测距的标准差记为σd,取值为0.1 m、1 m 和10 m,分别代表3种不同水平的测距精度。仿真中,假定所有的无人机均匀分布在半径100 m范围的球形空间内。在完成无人机集群坐标初始化后,实现无人机集群两两测距并加噪,同时对无人机集群真实坐标加噪作为惯导坐标,最后使用上述数据进行CRLB仿真,仿真结果如图2所示。
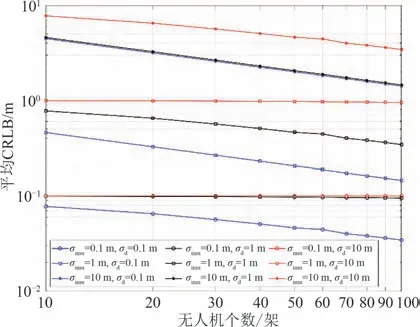
图2 融合定位CRLB仿真Fig.2 CRLB simulation of fusion positioning
仿真表明,随着无人机数量的增加,融合惯性导航和通信测距的定位精度将不断提高。以惯导误差σimu=10 m,测距误差σd=10 m 为例,10 架无人机集群可以将定位精度提高到8 m,当无人机数量增加到100 架,定位精度可以提高到3.5 m。针对实际中测距精度通常远高于惯导精度,以惯导误差σimu=10 m,测距误差σd=0.1 m 为例,10 架无人机即可将定位精度提高至4.47 m,当无人机数量增加到100架时,定位精度可提高至1.45 m。
此外,以惯导误差σimu=10 m,测距误差σd=0.1 m为例,高精度测距对于惯导定位标准差的提升符合的规律。以10 架无人机为例,融合前的定位精度标准差为10 m,融合后的定位精度标准差为同样,以100架无人机为例,融合前的定位精度标准差为10 m,融合后的定位精度标准差为
4.2 编队队形CRLB仿真
除了惯导定位精度、测距精度和飞机数量外,无人机集群的编队队形也会对定位精度产生严重的影响。针对无人机编队队形问题,本节重点考虑几种典型的无人机集群编队队形:平面圆形编队、平面正方形编队、立方体编队和球形编队,无人机数量为10~100 架。以σimu=1 m,σd=0.1 m 和σimu=1 m,σd=1 m 两种典型场景为例仿真验证编队队形分布对于定位的影响,每次仿真以随机生成无人机坐标的方式重复200次,仿真结果如图3所示。
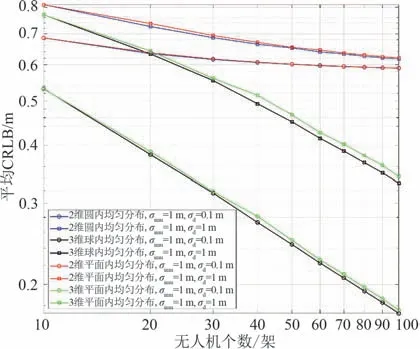
图3 不同编队队形融合定位CRLBFig.3 CRLB simulation of fusion location of different formation
仿真表明,无人机编队的维度对于融合定位精度影响很大。其中,平面圆形编队、平面正方形编队位于同一水平面内,在同样的惯导和测距误差下,正方形编队和圆形编队性能基本一致,圆形编队的性能略微优于正方形编队。而立方体编队和球形编队位于三维空间中,其融合定位性能远高于平面编队。与平面编队相似,球形编队的定位效果要略微优于立方体编队的定位效果。
其根本原因在于,二维平面的编队构型,由于缺乏高度维的观测信息,导致高度维的观测信息无法有效融合。即使在实验中,我们向XYZ三个维度增加相同方差的高斯白噪声,二维平面分布的测距结果无法支撑惯导数据Z轴的平差,导致融合定位算法在Z轴上的估计精度较低,从而影响了VDOP值,进而恶化了DOP 值,即融合定位性能。仿真中显示,随着无人机数量从10 架增加到100 架,二维平面编队的融合定位标准差下降至0.6 m 后保持稳定,不再下降。而三维立体编队的融合定位标准差则随着无人机数量增加稳步降低。这也说明,虽然集群的编队队形是编队控制的结果,但却影响了编队内相对定位的观测过程,尽可能使集群占据三维空间结构,将极大改善融合定位效果。
4.3 全信息融合定位算法仿真
本小节针对本文提出的融合定位方法通过数值仿真进行验证。考虑无人机数量为10 架和100架两种情况,每一架无人机的惯导定位误差σimu=1 m,验证测距误差相对于惯导定位误差变化过程中,融合定位算法的性能。在仿真中,假定所有的无人机均匀分布在半径100 m范围的空间内。仿真一共进行200次,每次均随机生成无人机坐标,并对无人机集群两两测距信息和惯导坐标加噪,最后分别仿真不同算法的性能,仿真结果如图4所示。
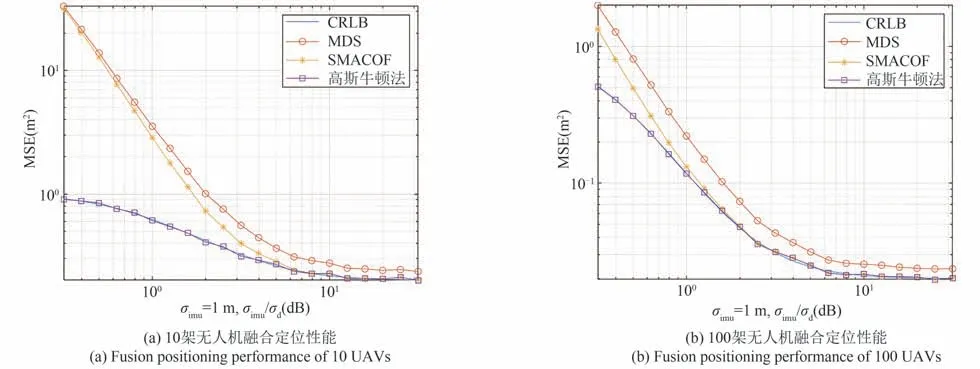
图4 全信息融合定位性能Fig.4 Full information fusion positioning performance
以CRLB 作为参考,分别验证了经典的MDS 定位方法、本文提出的基于高斯牛顿全信息融合定位方法、基于SMACOF的高精度测距辅助定位方法。仿真表明,针对无人机数量N=10和100两种情况,本文提出的基于高斯牛顿方法的优化方法可以达到CRLB,能够实现高精度的全信息融合,能够充分利用惯导定位信息和测距信息。本文提出的基于SMACOF的高精度测距辅助定位方法在测距方差较大的情况下,与CRLB之间存在较大的差距。随着测距精度提高,SMACOF 方法逐渐收敛到CRLB。而且,SMACOF 方法也受到无人机数量的影响,对于10架无人机的集群,SMACOF方法要求测距标准差小于惯导标准差1 个数量级,才能渐进达到CRLB。但对于100架无人机而言,SMACOF方法仅仅要求测距标准差和惯导标准差位于同一数量级,就能渐进达到CRLB。经典的MDS方法即使在较高测距精度的条件下,仍然与CRLB存在一定的性能差距。而且,在测距误差较大的情况下,基于MDS 方法和SMACOF 方法性能甚至不如纯惯导定位精度,究其原因在于,MDS方法和SMACOF方法均采用SVD方法求解相对坐标,其严格依赖于高精度测距假设。当测距误差较大时,算法反而引入了额外的计算误差。
此外,仿真表明,随着测距精度的不断提高,本文提出的定位方法和CRLB 同步收敛于固定值,融合定位精度不再提高。这是因为,根据前面的分析,此时的融合定位精度已经收敛到水平,达到极限。仿真结果也表明,对于σn=1 m,N=10架的条件下,极限融合定位精度达到了0.45 m ≈。同样,对于N=100 架的条件下,极限融合定位精度达到了。这也证明了本文对融合定位方法性能的分析。
4.4 相对定位性能仿真
此外,本小节还通过数值仿真验证本文所提算法在集群内部相对定位中的作用。不同于融合定位考察集群中每一架无人机的全局位置性能,相对定位考察无人机集群内部的相对位置关系。仿真中的参数与全信息融合定位算法仿真一致,以1 号无人机作为参考,验证剩余无人机相对于1 号无人机的相对位置。考虑无人机数量为10 和100 架的情况,每一架无人机的惯导定位误差σimu=10 m。在仿真中,假定所有的无人机均匀分布在半径1 km范围的空间内。仿真结果如图5所示。
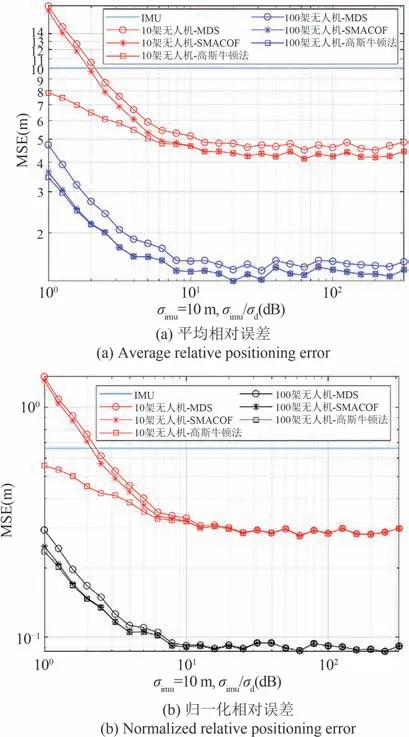
图5 相对定位性能Fig.5 Relative positioning performance
仿真表明,随着测距精度的提高,无人机集群内部的相对定位精度也随之提高,并快速收敛。对于10 架无人机的集群,利用融合定位算法,当测距精度提高至1 m 时,相对定位精度已经收敛至4 m左右。当无人机数量为100 架时,定位精度可以达到1.4 m。在相对定位问题中,对于高精度测距场景,误差主要是由于旋转矩阵引入的,即误差主要是方向偏差。
此外,考虑到无人机集群中,每一架无人机重点关注邻近无人机的相对定位精度,因此针对距离归一化的相对定位性能进行仿真验证。将无人机的相对坐标重新投影至100 m 距离的单位球上,计算归一化相对坐标的误差。仿真表明,10 架无人机的集群中,100 m 距离上的归一化误差在0.5 m量级;100 架无人机的集群中,100 m 距离上的归一化误差在0.1 m 量级,完全能够支持现有的集群协同。
5 结论
本文针对无人机集群定位问题,首先构建了MEMS 惯导定位模型和信号模型,并推导了融合定位问题的CRLB 和对应的最优化问题。本文基于高斯牛顿优化方法,提出了一种利用通信测距改善惯导定位精度的方法,并针对测距精度远高于惯导精度的场景,提出了一种高精度测距辅助定位方法,并分析了性能提升的程度。最终,本文通过数值仿真验证了本文所提算法的性能,全信息融合定位方法和高精度测距辅助定位方法能够极大改善定位精度,并且能够逼近定位问题的CRLB。仿真表明,对于包含N架无人机的无人机集群,依靠通信测距方法,本文所提算法能够将定位标准差降低量级,不仅能够提高集群的全局定位精度,而且能够极大改善无人机集群内部的相对定位精度。
本文使用的距离估计方法建立在延迟估计的基础上,因而通信延迟估计的准确程度会直接影响定位的效果。在无人机集群中,无人机平台时钟不同步、多径信道等都会对通信延时估计造成一定的影响,从而影响距离估计的结果,进而导致定位性能恶化。事实上,考虑到无人机集群通常位于高度较高、较为空旷的环境中飞行并执行任务,此时接收机接收到的经地面反射的信号功率较低,对时延估计较小,因此无人机机间的信道模型一般可以假设为简单的视距(Line Of Sight,LOS)高斯模型。同时,可以使用外部授时系统对无人机集群时钟初始化以解决无人机集群时钟不同步问题。
本文提出的利用通信测距改善惯导定位精度的方法不依赖外部授时与全球卫星导航系统,可以显著扩大无人机集群的应用场景,提高无人机集群在卫星拒止环境下的生存率。为提高通信测距精度,需针对通信测距一体化进一步设计波形,使用多天线技术或智能反射面技术提高信噪比,同时考虑到无人机发射功率受限的问题,为了保障无人机集群通信性能,功率分配问题同样需要重视。除此以外,本文提出的高精度测距辅助定位算法在强电磁对抗环境下是否能够正常工作尚待研究。同时,随着无人机集群节点数量的增多,急需开展去中心化的无人机集群定位算法研究。
猜你喜欢
军事文摘(2023年4期)2023-04-05 13:57:35
科学(2020年3期)2020-01-06 04:02:51
智富时代(2019年4期)2019-06-01 07:35:00
测控技术(2018年2期)2018-12-09 09:00:56
测控技术(2018年4期)2018-11-25 09:47:22
北京航空航天大学学报(2018年1期)2018-04-20 06:38:19
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
电子制作(2017年7期)2017-06-05 09:36:13
计算机工程(2015年4期)2015-07-05 08:28:57
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01 02:53:55
