星载视频SAR模式设计与数据处理
2024-02-24 01:54:40孙晗伟景茂强何德华祖家国于松柏张庆君
信号处理 2024年1期
孙晗伟 肖 枫* 景茂强 何德华 张 过 祖家国 于松柏张庆君 肖 汉
(1.北京无线电测量研究所,北京 100854;2.武汉大学测绘遥感信息工程国家重点实验室,湖北武汉 430079;3.中国空间技术研究院遥感卫星总体部,北京 100094)
1 引言
基于对重点区域的持续观测和数据处理,通过信号处理技术实现该区域动态视频,可实时获取船只、车辆的地理位置、移动方向、速度等重要信息,并对该区域进行持续观测的新型SAR 成像模式为视频SAR,该模式成为了近年来的研究热点[1-2]。
美国Sandia实验室在2010年首次基于Ku频段SAR实现了视频SAR实际验证与应用,综合考虑元器件水平、帧率和大气衰减等指标,视频SAR 系统通常设计在毫米波至太赫兹频段,这有利于设备小型化[2]。美国国防高级研究计划局(DARPA)于2016年实现了235 GHz频段的视频SAR成像[3]。德国高频物理与雷达技术研究所(Fraunhofer-FHR)于2019年成功实现了W 频段对城区的视频成像[4]。芬兰ICEYE 公司于2020 年基于其X 波段星载SAR 系统实现了SAR视频成像,用于动态监测港口和城市等高价值区域[5]。近年来,国内多家单位也相继对视频SAR系统和关键技术开展了研究并取得较大进展。
随着星载SAR 高频段元器件制造工艺的进步,Ka 频段星载SAR 载荷及天线技术逐渐成熟,研发制造Ka频段星载SAR成为可能。2023年5月21日,国际首颗Ka 频段高分辨率星载SAR 卫星珞珈二号成功进入预定轨道并开始在轨测试。Ka 频段载频是X 频段的4 倍左右,是C 频段的6~7 倍,高频段意味着小波长,而小波长意味着相同分辨率下的高帧率图像获取,本文基于珞珈二号SAR载荷实现了视频SAR 波位设计,基于实测数据完成了Ka 频段星载SAR图像处理与获取。
视频SAR 成像处理算法分为时域类成像算法和频域类成像算法。虽然频域类成像算法(CS,Chirp-Scaling 类[6]、RMA,Range Migration Algorithm 类[7])算法效率较高,但其处理所得图像依赖于观测几何(距离-多普勒),对于视频SAR 数据不同帧成像结果图位置不完全一致,这意味着形成视频需要额外的图像配准操作;而时域类成像算法成像区域始终位于网格划分处,不会产生偏移和旋转,因此视频SAR成像算法通常基于时域类处理内核并进行优化。从计算机层析领域引入的后向投影算法(BP Algorithm,BPA)理论上适用于任意轨道、任何成像模式,算法适用性极强。算法思路是将每个脉冲投影到成像平面并进行相干累积。然而在后向投影的过程中需要计算网格和每个脉冲时刻的卫星距离,这样的投影运算量级达到O(N3),巨大的运算量限制了算法的应用。在该背景下,为了提升算法效率,各国学者提出了很多快速时域成像算法。2011 年Angel Ribalta 提出了GBP 算法(Generalized Backprojection Algorithm,GBP)[8],该算法基于快速BP算法,考虑了成像期间天线的位置移动,提高了成像处理精度;2003 年,Lars M.H.Ulander提出了FFBP 算法(Fast Factorized BP)[9],该算法是快速算法的进一步发展,是多级BP算法的代表,通过分级的思想进一步提升了算法效率。然而,不论是GBP算法还是FFBP算法,算法在低分辨率图像融合成高分辨率图像的过程中都涉及插值操作,这样的操作随着融合次数的增加会积累更大的误差,如果为了降低误差的积累采用更精确的插值核,会增加算法的运算量。为了降低快速BP算法的误差积累,西安电子科技大学2014年提出了AFBP(Accelerated Fast BP)算法[10],AFBP 通过频谱平移和拼接代替了FFBP算法的插值操作,提升了算法效率,但是该算法推导中存在包络和相位的近似,并且不适用于条带、滑动聚束模式;2018年,西安电子科技大学提出了CFBP(Cartesian Factorized BP)算法[11],该算法继承了FFBP 算法的高效性,并且没有引入额外误差(包络和相位误差)。
本文对星载视频SAR 模式设计与数据处理进行了探讨,首先研究了基于星载Ka 频段载荷实现视频SAR模式设计的方法并给出实例,而后给出了基于CFBP 算法的流水线流程化快速成像算法,实现了星载视频SAR数据的快速处理,最后采用珞珈二号实测视频SAR 数据对模式设计结果及成像算法进行验证,结果表明星载视频SAR 模式可行,具备机动目标实时监测的能力,同时验证了所提出的视频SAR数据处理算法的正确性。
2 星载视频SAR模式设计
2.1 星载视频SAR模式设计方法
机载SAR 系统可对场景实现圆迹、凝视等多种航线规划并完成视频数据获取,使用灵活性大;而对于星载SAR 系统,由于其近圆轨道的限制,凝视聚束模式是实现一定区域内的持续观测的主要可行手段,如图1 所示,视频SAR 在整个观测期间波束指向地面固定点,斜视角由前斜视变为正侧视最后为后斜视。综合考虑雷达威力、平台机动能力、供电能力等指标,珞珈二号SAR载荷的视频模式设计对于重点区域持续观测时间一般为30 s,对成像区域观测斜视角度约为±12°。视频SAR 模式设计中另一个关键参数是帧率,若图像真实帧率太低(低于1 Hz),通常无法实现观测区域视频。SAR 在方位向利用合成孔径原理实现一定方位分辨率,所需时间为合成孔径时间,对于典型波段低轨SAR,实现1 m分辨率所需合成孔径时间如表1所示。
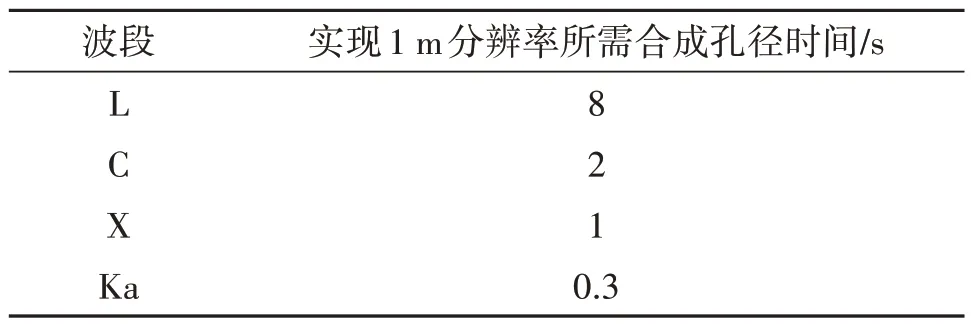
表1 典型波段低轨SAR实现1 m分辨率所需合成孔径时间Tab.1 The synthetic aperture time required for a typical band low-orbit SAR to achieve 1 m resolution
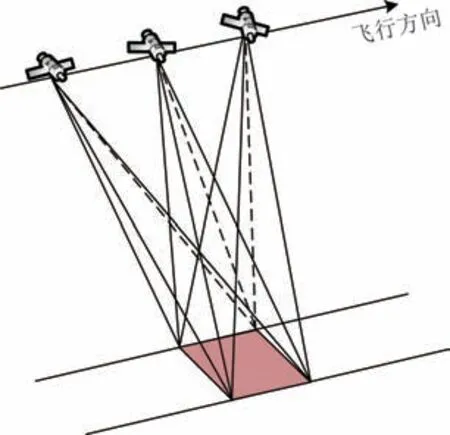
图1 星载视频SAR几何模型Fig.1 Spaceborne video SAR geometry
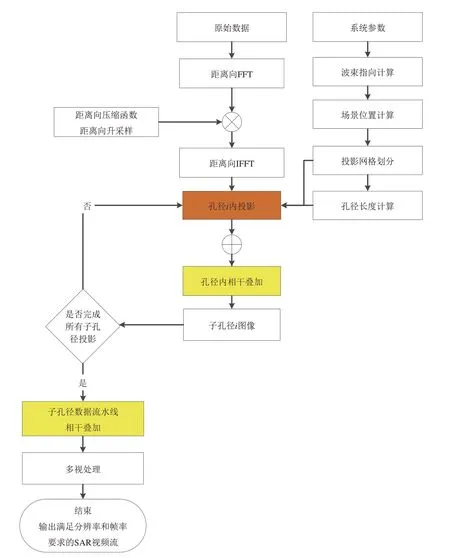
图2 基于时域成像算法的视频SAR流水线处理流程Fig.2 Video SAR pipeline processing process based on time domain imaging algorithm
由表1 可知,利用较低频段(X 频段以下)星载SAR 实现视频SAR 帧率低于1 Hz,系统性能较差,而Ka 频段星载SAR 帧率大于3 Hz,若设置一定比例重叠率可实现优于5 Hz 帧率的视频SAR 观测性能,此时系统能较好实现对重点区域的一定时间内观测并形成视频。
最后,在对重点区域进行30 s凝视观测时间内斜视角、下视角变化剧烈,在满足NESZ(噪声等效散射系数)、数据率、模糊度等指标的前提下通常无法基于单一波位实现场景的观测,应进行分段设计以适应PRF、采样起始时间和采样点数的变化。分段数量上限受到载荷能力限制,下限受到波位设计限制,一般10~20个波位即可实现30 s内场景的完整凝视观测。珞珈二号星载视频SAR波位设计准则如下:
(1)根据所观测目标地理位置及轨道预报信息以及观测斜视角度范围确认观测弧度,精确到秒。
(2)将30 s 观测时长划分15 段,每段重复进行以下波位设计流程:
a)由几何关系、雷达波段、带宽、脉宽、保护时间、采样率、天线尺寸、峰值功率等参数,在满足避开星下点回波和发射脉冲的前提下确定合适的PRF(脉冲重复频率)集合;
b)按照PRF 由小到大的顺序计算当前PRF 下的NESZ、AASR(方位向模糊比)、RASR(距离向模糊比)、占空比、数据率、测绘带宽度等指标;
c)若上述所有指标满足视频模式波位要求,则完成该波位设计并保存波位设计结果,否则更换PRF并重复b)步骤。
(3)完成15段波位设计结果并保存,结束。
2.2 星载视频SAR模式设计实例
基于上节波位设计方法和卫星轨道信息,规划珞珈二号SAR 载荷于UTC 时间2023 年8 月20 日21:30 对苏伊士运河旁(31.11°N,32.31°E)进行观测,观测时长30 s,共15 个波位。波位设计关键结果如表2所示。
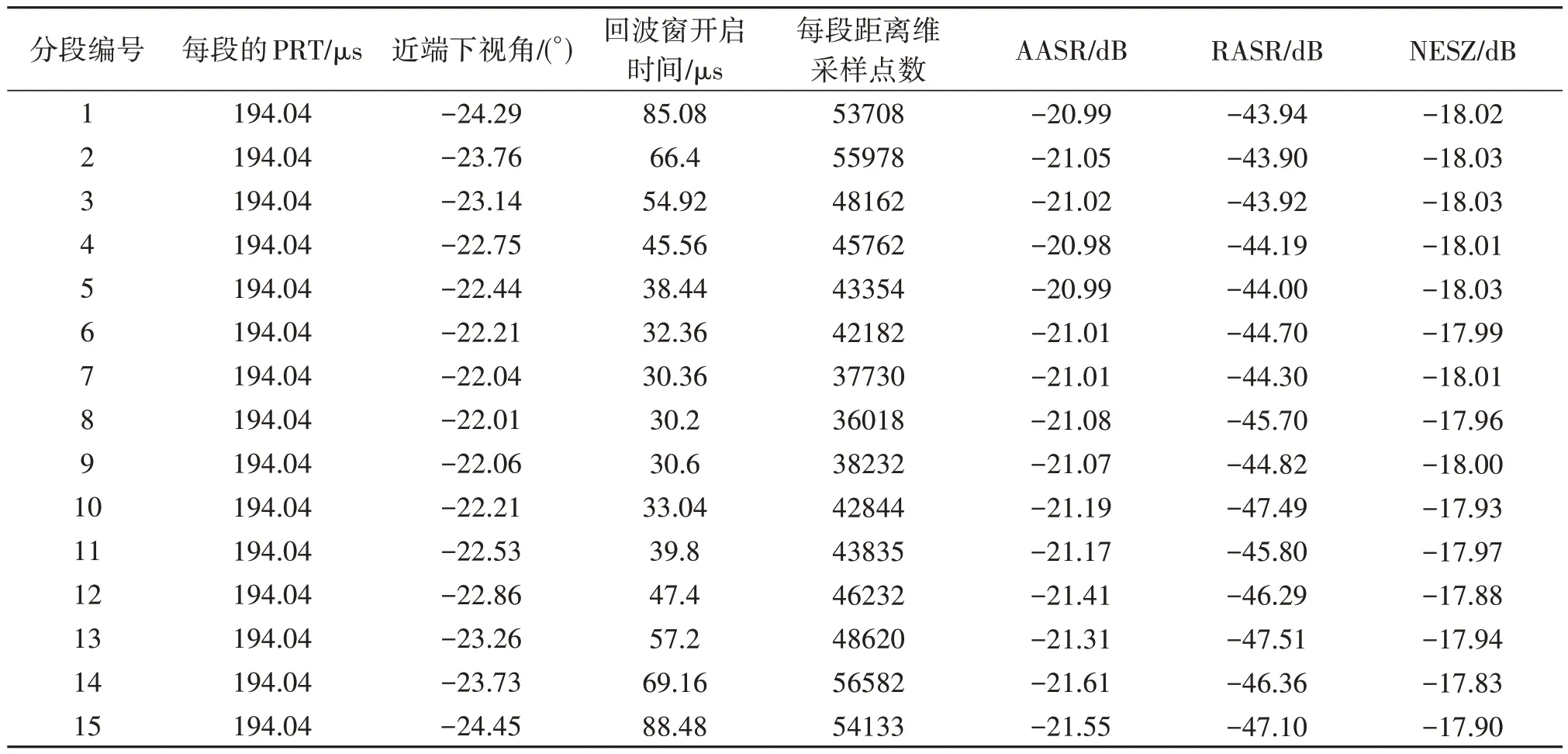
表2 星载视频SAR模式设计结果Tab.2 Spaceborne video SAR mode design results
如表2 所示,此时恰好能实现不变重频对苏伊士运河进行凝视观测,为适应距离徙动变化,回波窗开启时间由大到小再到大,为保证可完整接收波束宽度内回波,距离向采样点数同样由大到小再到大。波位设计结果满足模糊比(AASR、RASR)低于-20 dB,NESZ低于-17 dB指标要求。
3 星载视频SAR快速成像算法
为了形成一定帧率的SAR 视频流,本文提出一种流水线式的视频SAR 处理流程,其算法流程如图 2 所示,标黄处为该视频SAR 流水线处理流程的关键步骤,标橘色处为进行并行化加速步骤。由于视频SAR成像几何为凝视聚束模型,处理算法针对的回波模型实际上是凝视聚束SAR回波。
算法处理流程如下:
1)在距离频域对回波数据进行距离向压缩处理,匹配滤波函数为
其中Kr=B/Tp,B为带宽,Tp为脉宽。脉冲压缩的同时需要进行距离向升采样,一般通过频域补零完成,综合考虑处理精度与算法效率,升采样倍数通常设为4倍。
2)基于SAR 载荷和平台辅助参数计算波束指向,该步骤主要涉及坐标系转换。
3)计算波束与地表椭球面交点,需要说明的是,为精确计算场景位置,需应用该区域DEM(数字高程模型),由于视频SAR 幅宽约为(2 km×5 km),幅宽较小,采用成像区域平均DEM即可。
4)投影网格划分,划分投影网格要保证覆盖成像区域,网格间距略小于分辨率。
5)孔径长度计算,孔径长度设置为单视频帧率对应时长,例如5 Hz视频帧率就要求孔径长度按照为0.2 s对30 s数据连续划分。
6)子孔径投影,对每个子孔径内部所有方位向采样点进行时域反投处理,使用CFBP 算法对子孔径成像到同一网格上,避免了不同孔径间融合和配准操作,并且投影运算中可应用GPU在算法实现时进行加速。
7)孔径内图像相干叠加,对每一个子孔径内的图像相干叠加为1幅图像,完成该步骤后,一个子孔径对应一幅图像。
8)判断是否所有子孔径内图像都完成了相干叠加处理,如完成则进行步骤9),否则返回步骤6)对下一子孔径进行投影计算。
9)子孔径数据流水线相干叠加,根据图像分辨率需求完成每一视频帧的生成。如图3 所示,“SA”为Sub-aperture 缩写,表示子孔径含义,在步骤8)中已经将数据划分为红色子孔径并完成子孔径内成像相干累加,而后需计算合成全分辨图像需要的合成孔径时间(多视前),得到图像单视分辨率等于多视分辨率除以多视系数。例如方位多视视数为2,则须达到0.5 m 单视分辨率,需要0.6 s合成孔径时间,因此3个子孔径数据块相干叠加即可实现0.5 m单视分辨率图像获取。依次进行子孔径数据叠加完成视频SAR 每帧图像处理。该步利用步骤6)和7)后向投影结果,没有重复的后向投影计算,且处理流程按流水线进行,效率很高。事实上,为满足较高帧率视频生成要求,该处理属于有重叠孔径的视频流生成方案。
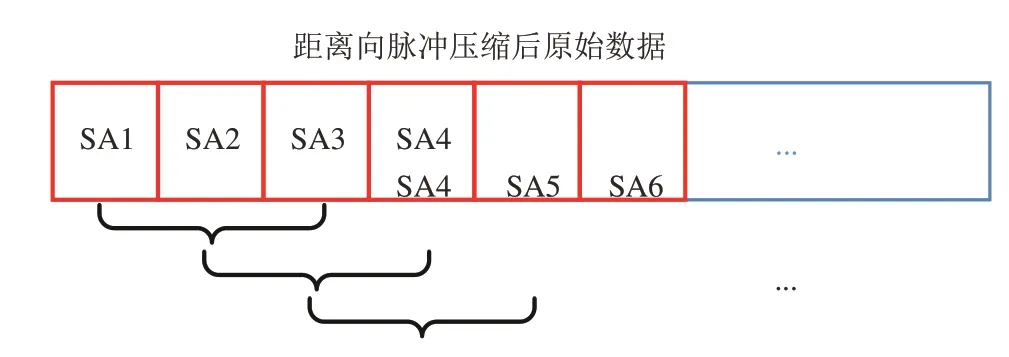
图3 子孔径划分和流水线叠加示意图Fig.3 Schematic of sub-aperture division and pipeline overlay
10)多视处理,多视处理算法如下:
a)得到高分辨率SAR复图像;
b)取该图像模值;
c)沿方位维根据多视系数对相邻N个像素幅度值求均值,N为多视系数;
d)得到多视幅度图,此时多视图方位维分辨率是单视图方位维分辨率N倍。
需要说明的是,多视处理的作用在于提升图像信噪比,等效提升NESZ指标,代价是观测时间的增加。事实上,对于地面某一目标,经过理论推导,其方位维分辨率由下面公式计算:
vg为波足地面移动速度,Ba为该目标对应多普勒带宽,K1为方位向天线方向图加权引入的展宽系数;K2为方位向天线波束宽度的展宽系数,均匀加权下为0.886。由于成像算法为时域算法,其最终图像像素间隔取决于网格间距设置,实际处理中网格间距设置略小于图像理论单视分辨率,这符合Nyquist 采样定理,即完成成像后图像在时、频域无混叠。通过多视处理,图像像素间隔为原来的N倍,N为多视系数。由于Nyquist 采样定理限制,一幅图像的分辨率通常无法小于图像像素间隔,这等效于将图像分辨率降为多视前图像的N倍。
依照上述流程即完成视频SAR 数据处理,获取满足分辨率和帧率的场景的视频每帧图像。
4 珞珈二号实测数据处理
为了验证视频SAR 模式设计和所提视频SAR快速成像算法,基于珞珈二号SAR载荷开展了星载SAR 观测实验,观测场景为苏伊士运河(31.11°N,32.31°E),观测波位为2.2 节波位设计结果,共15 个波位。该数据主要系统参数如表3所示。
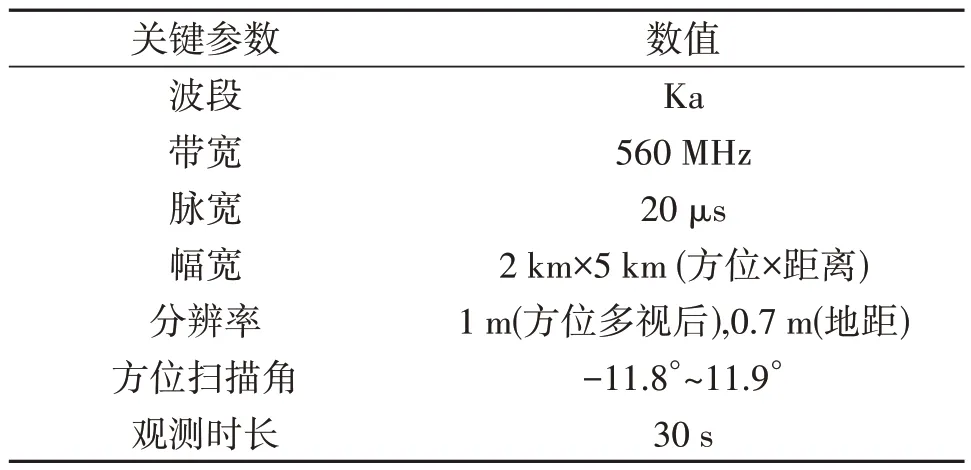
表3 星载视频SAR苏伊士运河数据主要系统参数Tab.3 Main system parameters of spaceborne video SAR of Suez Canal data
分析距离压缩后结果,如图4所示,可见对于波位1,8,15的1000采样位置处能量最大位置均得到完整采样,这说明了完成了回波主要能量区域数据采样,采样偏差较小,可以进行后续后向投影成像处理。
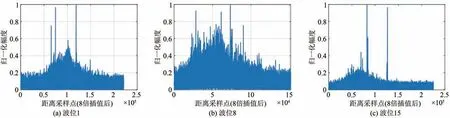
图4 信号距离压缩后一维幅度图Fig.4 One-dimensional amplitude plot of signal after range compression
对该区域完成成像并形成视频流(5 Hz),总计得到150 张SAR 图像,单幅图观测时长为0.6 s,相邻图间重叠比率为(0.6 s-0.2 s)/0.6 s=66.7%,图5为按时间顺序的其中30 张图像。从成像结果图中可清晰观测到河边有一艘货船,该货船在靠近岸边移动,由于货船与岸边几乎平行,这里测量了货船与岸边距离变化,实测在30 s 内货船与岸边距离从107 m 拉近到10 m 左右,位移接近100 m。该实验首次实现了天基Ka 频段视频SAR 数据获取与成像处理,展示了天基视频SAR 对地面/海面机动目标的实时探测能力,并且成像图清晰完整,验证了所提星载视频SAR快速成像算法的正确性。
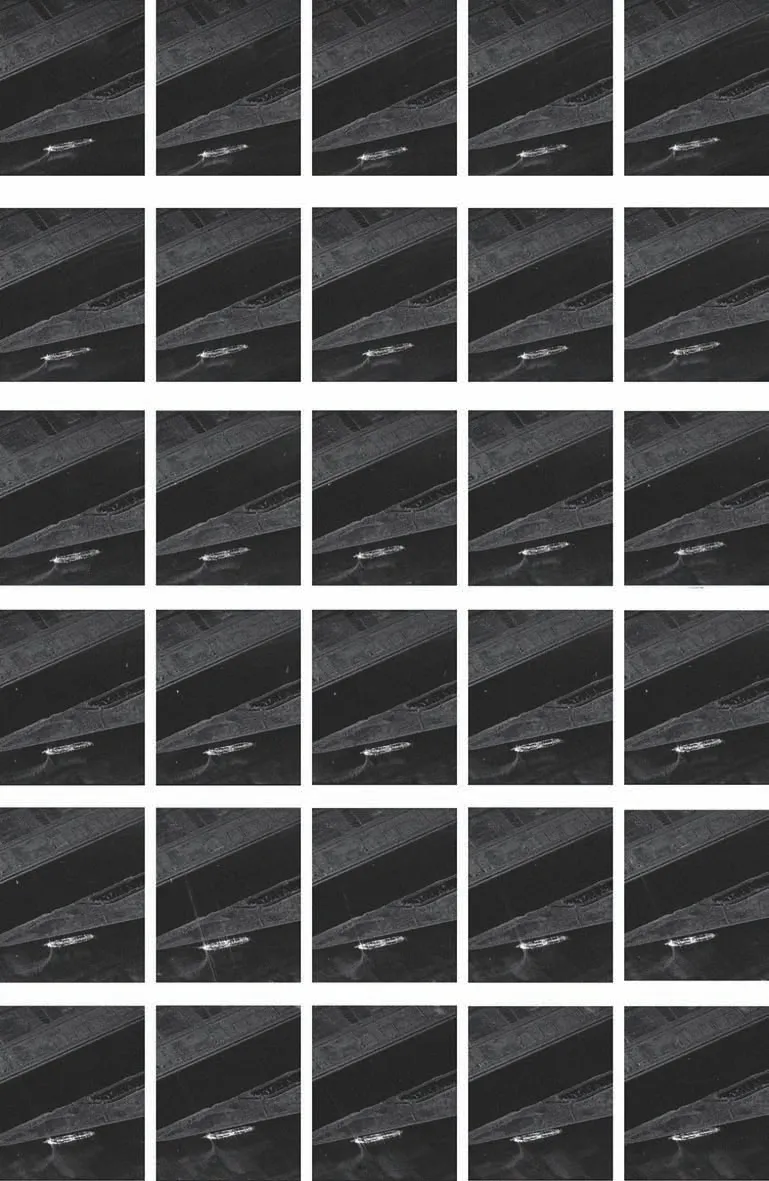
图5 星载视频SAR苏伊士运河区域成像结果(按观测时间顺序排列)Fig.5 Imaging results of the SAR Suez Canal region on spaceborne video(in time order of observation)
算法效率方面,该算法主要运算量位于距离向脉冲压缩和子孔径内投影两部分,其中距离向脉冲压缩是所有时域算法的共同步骤,运算量为5Na·Nr·log2(Nr)量级,得益于CFBP算法的优化,子孔径内投影部分算法运算量级为3na·nr·log2(Nr),该视频SAR 分段15 段,每段数据图像方位向采样点数Na=10309,Nr 可见于表2 第5 列,成像结束后单视图像尺寸为10200(距离nr)×6800(方位na)。算法运算量远低于BP 算法O(N3)的运算量,通过将算法部署在高性能服务器上,距离向脉冲压缩基于CPU 进行多线程加速,子孔径内投影基于GPU 加速,可分别在1 小时内完成距离向脉冲压缩和4 小时内完成子孔径内投影运算,最终在5.5 小时内完成回波输入到150幅视频帧图像输出全流程运算。
5 结论
视频SAR 模式自提出以来,被广泛应用于重点区域监测、变化检测、机动目标确认等领域,然而由于探测距离、威力等原因,视频SAR系统大多用于空基平台。本文首先分析天基SAR平台实现视频SAR的可行性并完成了模式设计,结论表明利用凝视聚束可实现30 s时间的重点区域观测并形成视频;而后提出了一种基于CFBP算法适用于大数据量的星载视频SAR流水线处理流程,最后采用珞珈二号SAR卫星进行试验,验证了星载视频SAR 的重点区域监测能力和所提星载视频SAR流水线处理流程的有效性。
猜你喜欢
地震研究(2021年1期)2021-04-13 01:04:56
数学物理学报(2021年1期)2021-03-29 03:14:42
新疆大学学报(自然科学版)(中英文)(2020年2期)2020-07-25 01:40:34
学生天地·小学低年级版(2019年5期)2019-06-05 01:15:11
学生天地(2019年15期)2019-05-05 06:28:28
西南石油大学学报(自然科学版)(2018年2期)2018-06-26 06:19:12
雷达学报(2017年1期)2017-05-17 04:48:53
光学精密工程(2016年1期)2016-11-07 09:01:53
CHIP新电脑(2016年3期)2016-03-10 14:07:52
中国新通信(2015年1期)2015-05-30 10:30:46