自转旋翼无人机的起飞控制研究
2024-02-21 03:50孙本良曹东薛鹏翔
机械制造与自动化 2024年1期
孙本良,曹东,薛鹏翔
(1. 南京航空航天大学,江苏 南京 210016; 2. 中国人民解放军95791部队,甘肃 酒泉 735099)
0 引言
自转旋翼无人机作为无人驾驶飞行器中的一员,它既区别于固定翼无人机与无人直升机,又同时兼备了两者的诸多特点。在结构方面,自转旋翼无人机具有与无人直升机类似的旋翼,但自转旋翼无人机在飞行过程中无动力驱动旋翼的运动,仅靠前方来流的吹动实现旋翼的自转,从而为自转旋翼无人机提供升力。在动力方面,自转旋翼无人机在前进方向安装了由发动机驱动的螺旋桨,为自转旋翼无人机提供了前进方向的动力,这一点又和固定翼无人机类似[1]。相较于固定翼无人机与无人直升机,自转旋翼无人机具有结构简单、操纵容易、经济性、安全性和可靠性高等特点,在各个领域均有广阔的市场与良好的发展前景。
自主起飞是自转旋翼无人机飞行过程中的一个重要过程,只有实现平稳安全的起飞后,才能够对后续的飞行过程实现进一步的控制。自转旋翼无人机的自主起飞可划分为预旋阶段、滑跑阶段、前轮离地段、三轮离地段、离地爬升段,每个阶段存在一定的控制难点。由于自转旋翼无人机的质心高、桨盘惯性大、桨盘定轴性等原因,在滑跑阶段大速度纠偏易引起侧翻,因此前轮纠偏具有一定的危险性。而抬前轮时的速度与旋翼转速的匹配对平缓起飞有很大影响,若速度大旋翼转速小,离地时易因桨盘迎角大于或临近失速迎角而导致升力不足,出现低头现象;若速度小旋翼转速大,离地时易由于阻力的作用以及速度过小出现失速现象。在起飞抬前轮时压杆动作易造成机身姿态不稳,而离地加速段需要快速建立空速和升力,对起飞姿态控制有很高的要求。本文针对某型自转旋翼无人机,对起飞过程的各个阶段进行分析与研究,设计起飞过程各控制回路的控制策略,保证无人机能够平稳、安全地起飞。
1 自转旋翼机工作原理
1.1 系统组成
自转旋翼机基本构成包括旋翼系统、动力系统(发动机)、机身、垂尾和起落架。其中操纵机构包括桨盘纵倾、桨盘横倾、方向舵、油门、刹车[2]。某型自转旋翼无人机的结构如图1所示。
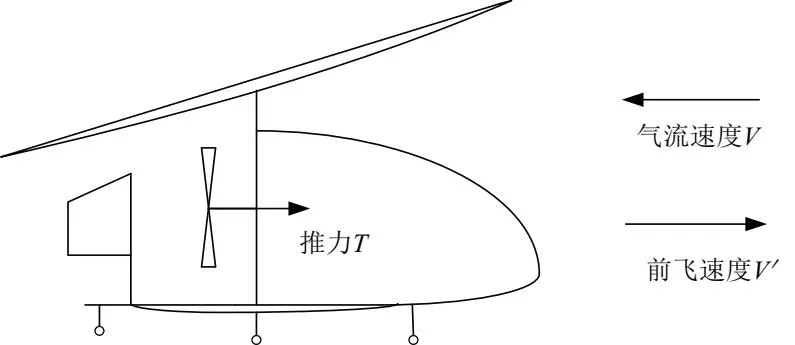
图1 某型自转旋翼机结构示意图
自转旋翼无人机在飞行过程中,其顶部无动力旋翼随前方相对来流吹风而自转,不但可以为旋翼机提供升力,而且可以通过操纵桨盘纵倾或横倾对自转旋翼机的飞行姿态进行调整[3]。操纵桨盘纵向倾角可使桨盘平面纵向倾斜,即升力纵向倾斜,从而改变自转旋翼机的俯仰姿态,其作用相当于固定翼无人机的升降舵或者无人直升机的纵向周期变距;操纵桨盘横向倾角可使桨盘平面横向倾斜,即升力横向倾斜,从而改变自转旋翼机的滚转姿态,其作用相当于固定翼无人机的副翼或者无人直升机的横向周期变距。自转旋翼机的前进动力靠螺旋桨发动机提供,可以通过控制油门开度来控制前进推力的大小。自转旋翼机的航向稳定与调整则依靠机体后端方向舵的舵面偏转实现。
1.2 起飞过程分析
旋翼机起飞段是指旋翼机从跑道起点由加速滑跑到爬升至安全高度的过程,根据自转旋翼机起飞过程中的不同运动状态与特点,可将起飞过程分为起飞预旋段、三轮滑跑段、两轮滑跑段、离地爬升段4个阶段[4],并对各阶段的控制策略进行设计。自转旋翼机的起飞过程示意图如图2所示。

图2 起飞过程示意图
1)起飞预旋段
执行起飞任务前需对旋翼机进行安全检查,判断满足安全飞行条件后,将旋翼机置于跑道上。由于旋翼机的旋翼在飞行过程中是被动旋转的,在起飞前需让旋翼进行预旋,使旋翼转速达到一定转速后方可进行滑跑。预旋过程旨在建立一定的旋翼初始转速,使得滑跑至前轮离地时空速与旋翼转速均在安全范围内。在预旋阶段,对象无人机桨盘由水平位置向最大倾角偏转,刹车开启,发动机处于怠速状态,开启预旋开关,等待旋翼转速达到250r/min后断开预旋,旋翼机进入滑跑阶段。
2)地面滑跑段
预旋结束后,桨盘纵向倾角已调整至最大角度,松开刹车,发动机以最大油门进行滑跑,并在滑跑阶段接入前轮纠偏控制,使旋翼机沿着跑道方向进行滑跑。随着旋翼机的滑跑速度逐渐增大,旋翼的转速在稍微减小后保持持续增长,对象无人机在前轮抬起时刻空速约为29m/s,旋翼转速达到350r/min。在前轮抬起瞬间需迅速减小桨盘纵向倾角,使得旋翼产生的升力在垂直方向的分力迅速增大到足以克服重力,但桨盘纵向倾角调整幅度需要准确控制,桨盘纵向倾角减小过大会导致旋翼机前轮触地而桨盘纵向倾角减小不足则会导致旋翼机后翻[5]。随后旋翼机在保持两轮滑跑短暂距离后,三轮均可离地并进入离地爬升段。
3)离地爬升段
离地爬升段是由地面滑跑到空中飞行过渡的关键阶段,该阶段需要调整旋翼机的姿态保持稳定的空速与旋翼转速,使得旋翼机稳步爬升至安全高度。三轮离地后,断开前轮纠偏控制,改用调整桨盘横向倾角来平衡发动机扭力矩,保持横侧向力矩平衡。对于纵向通道,需调整桨盘纵向倾角缓慢降低,目的是增加旋翼升力水平方向的分力,迅速建立爬升所需的最佳空速。待旋翼机爬升至离地50m后达到安全高度完成起飞,进入空中爬升阶段,旋翼机接入空速与高度控制,使旋翼机在空中稳定飞行。
对象旋翼机在起飞各阶段的配平状态表如表1所示。
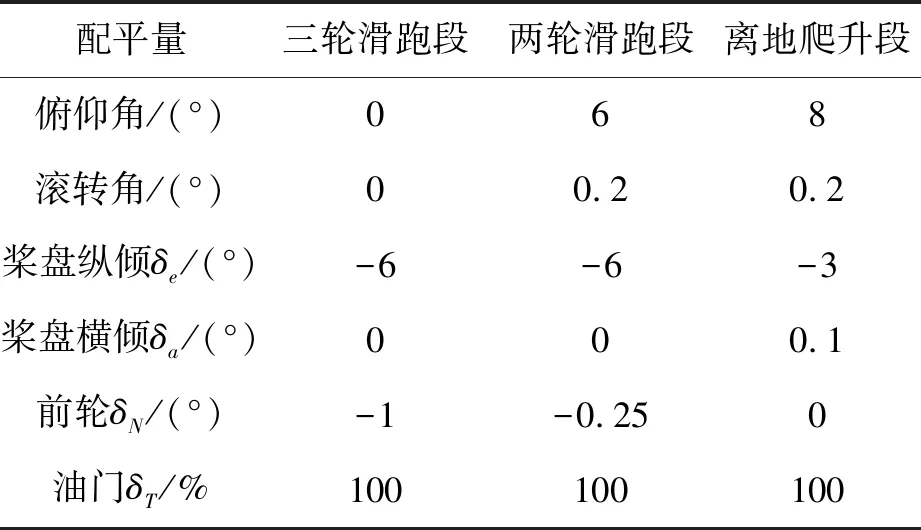
表1 旋翼机的配平状态
2 无人旋翼机起飞控制策略
无人自转旋翼机的起飞过程主要目的是使旋翼机能够以稳定的姿态爬升至安全高度,从而转入空中飞行。其中旋翼机由滑跑转离地爬升过程对起飞安全影响最大,需对其进行纵向与横侧向控制,保证旋翼机安全离地起飞与力矩平衡。
2.1 纵向控制策略
自转旋翼机的旋翼在相对来流的驱动下旋转为旋翼机提供升力,通过控制旋翼桨盘纵向倾角改变旋翼升力的大小,从而对旋翼机进行纵向控制。
在预旋阶段桨盘纵倾被调整至最大,为保证滑跑阶段纵向通道的稳定性,接入俯仰角速率控制起到提前抑制机身俯仰角变化的作用,减小抬头瞬间后翻的风险。在前轮离地瞬间需迅速减小桨盘纵倾[6],但会造成纵向稳定性突变,所以对象旋翼机采用提前减小桨盘纵向倾角的方式,保证前轮离地瞬间的安全性。旋翼机两轮滑跑过程中需加入俯仰角比例与微分(PD)控制,调整俯仰角姿态使旋翼机三轮离地,离地后对俯仰角PD控制系数进行微调,保证旋翼机稳定爬升至安全高度。
2.2 横侧向控制策略
在起飞过程中,自转旋翼机主要通过操纵前轮舵机和桨盘横向倾角完成对横侧向姿态的控制,前轮舵机主要用于滑跑纠偏,桨盘横倾主要用于保持滚转力矩的平衡。
在滑跑过程中,因风的干扰、旋翼结构不对称、跑道不平整等干扰因素,会导致旋翼机相对跑道出现一定的偏航与侧偏,因此在滑跑阶段需接入前轮纠偏控制[7]。同时高速滑跑会带来较大的惯性,如果前轮纠偏过大使得前轮方向与速度方向有较大偏差,产生的侧力可能导致机体发生侧翻。因此对前轮纠偏策略低速段采用具有一定纠偏能力减小初始偏航和初始侧偏,而高速段则降低纠偏控制幅度。在前轮抬起后保持前轮纠偏控制并加入滚转角反馈控制,确保旋翼机保持姿态安全离地。三轮离地后,转入加速爬升段,断开前轮纠偏控制,改用桨盘横倾调整自转旋翼机的航向稳定。
3 控制回路设计
3.1 纵向控制回路设计
起飞过程纵向控制回路如图3所示,通过基于桨盘纵倾的俯仰角PD控制调整纵向姿态,将旋翼机俯仰角保持在给定范围内,保证系统具有良好的动态特性和阻尼特性。
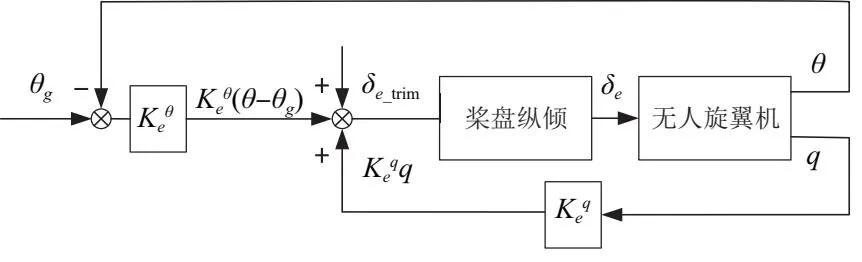
图3 纵向控制回路

(1)
三轮离地后,需进一步减小桨盘纵倾以达到提高旋翼转速的目的,将δe_trim调整为-3°,其他系数保持不变。待旋翼机爬升至安全高度后完成起飞,接入空中爬升控制律实现对空中姿态的控制。
3.2 横侧向控制回路设计
旋翼机在自主起飞过程中,采用前轮、方向舵和桨盘横倾分时分段的组合控制方法,实现起飞过程中的航向和纠偏控制,横侧向控制回路如图4所示。
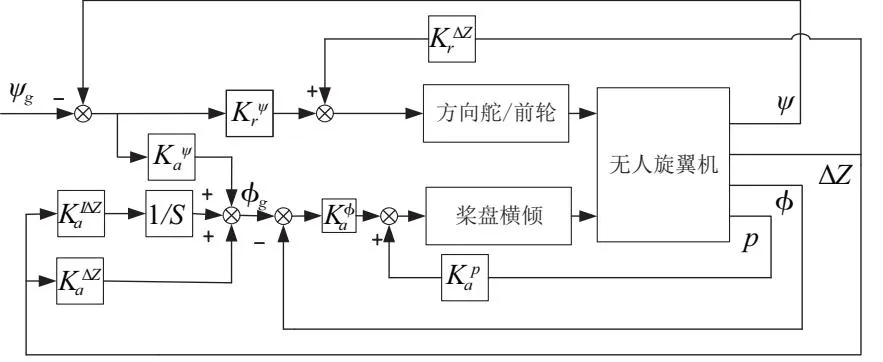
图4 横侧向控制回路
(2)



4 仿真验证
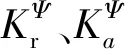
为了验证设计的控制策略和控制律,以FlightGear飞行模拟器上的JT-5B自转旋翼机作为控制对象,设计了等效飞控软件。等效飞控软件通过UDP端口对FG输出native-ctrls数据包,以控制对象飞行器的气动舵面和发动机,驱动飞行器的运行;通过UDP端口接收FG输出的native-fdm数据包,以获得对象飞行器的飞行状态参数[9]。所设计的仿真系统结构框图如图5所示。
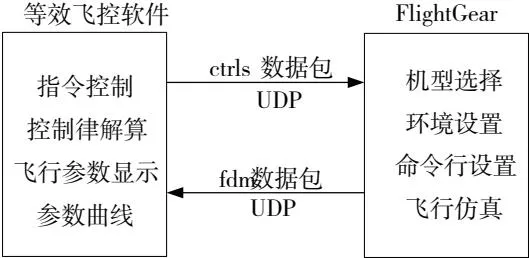
图5 仿真系统结构框图
对FlightGear环境配置步骤如下,将机型文件放置在安装路径的Aircraft文件下后,即可选择使用对象无人机,设置初始在机场跑道上,时间为白天,初始仿真状态暂停,对命令设置如下:
--native-fdm=socket,out,100,127.0.0.1,8050,udp
--native-ctrls=socket,in,100,127.0.0.1,8080,udp
通过等效飞控软件发送起飞指令后,经过控制律解算发送ctrls数据包驱动FlightGear中的机型运动,观察FlightGear内无人机的运动状态以及反馈的fdm飞行参数数据并绘制图像。
无人机执行起飞指令后的高度与速度变化曲线分别如图6—图7所示。图中高度为海拔高度。从仿真结果可知,初始高度约为152.7m,旋翼机预旋67s左右后断开预旋并开始加速滑跑,在82s左右开始离地逐步爬升,在三轮离地后爬升速率有短暂略微变化,随后稳定爬升,在100s左右达到200m安全高度完成起飞,此时接入空中爬升控制律进入飞行状态。
图6 高度变化曲线
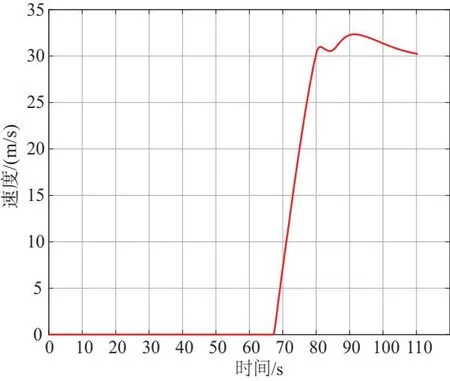
图7 速度变化曲线
桨盘纵倾、俯仰角与俯仰角速率变化曲线如图8所示。在前轮离地时刻俯仰角速率与俯仰角突变增大,接通俯仰角PD控制抑制了俯仰角速率的增大,并通过提前减小桨盘纵倾的共同作用可防止旋翼机产生后翻。三轮离地后进一步减小桨盘纵倾使得俯仰角速率降低后逐渐回调,从而引起俯仰角短暂减小后继续增大,在100s左右,桨盘纵倾操纵趋于稳定,俯仰角速率趋于0,俯仰角也趋向于稳定,等待接入空中爬升控制律,维持空中飞行状态稳定。

图8 纵向模态曲线
桨盘横倾、前轮变化曲线如图9所示,预旋结束后旋翼机航向与起飞航向有略小偏差,断开预旋后前轮纠偏接通,使得前轮偏转,最终在低速段调整至-1°左右后,高速段减小控制幅度,前轮偏转减小,前轮离地后,接通滚转角反馈控制,副翼发生偏转;三轮离地后,断开前轮纠偏控制前轮偏转归0,副翼进一步调整控制横侧向稳定。

图9 桨盘横倾与前轮变化曲线
滚转角、滚转角速率、偏航角速率变化曲线如图10所示。三轮滑跑后接通前轮纠偏控制,偏航角速率波动,旋翼机开始调整航向;两轮滑跑段接通滚转角控制,滚转角调整趋于0°,三轮离地后断开了前轮纠偏控制,改用桨盘横倾控制,各变量小幅跳变后调整至新的平衡状态,旋翼机维持该横侧向的稳定状态起飞。

图10 横侧向模态曲线
联立等效飞控软件与FlightGear软件进行仿真,飞行效果如图11所示,对象旋翼机可较好完成滑跑到起飞过程,并能在达到安全高度后平滑接入空速控制、高度控制等空中控制策略,使无人旋翼机在空中进一步稳定飞行。

图11 仿真效果图
5 结语
自转旋翼无人机的起飞过程较为复杂,需根据旋翼机的不同运动状态划分为多个过程。横侧向控制方案可根据低速滑跑段、高速滑跑段、前轮离地段、三轮离地段等不同阶段采取相应的控制策略;纵向控制方案可根据预旋阶段、滑跑段、前轮离地段、三轮离地段采取相应的控制策略。对每个过程的控制策略进行设计,保证旋翼机在起飞过程中横向与纵向姿态的稳定性,确保无人机能够安全起飞。
猜你喜欢
实验流体力学(2023年1期)2023-03-21
装备制造技术(2021年4期)2021-08-05
北京航空航天大学学报(2021年6期)2021-07-20
北京航空航天大学学报(2021年6期)2021-07-20
装备制造技术(2020年1期)2020-12-25
空间科学学报(2020年4期)2020-04-22
北京航空航天大学学报(2016年3期)2016-02-27
百科探秘·航空航天(2016年11期)2016-02-26
红蜻蜓·低年级(2015年11期)2016-02-02
中国自行车·骑行风尚(2014年4期)2014-10-10