混合教学模式下“自动控制原理”课程教学设计及思政育人路径探索
2024-02-21 03:49魏延岭黄学良
机械制造与自动化 2024年1期
魏延岭,黄学良
(东南大学 a. 自动化学院; b. 电气工程学院,江苏 南京 210096)
1 现状分析
国务院《关于全面深化新时代教师队伍建设改革的意见》提出:“让教师主动适应信息化、人工智能等新技术变革,积极有效开展教育教学”。同时,由于疫情的突如其来,传统教学秩序被打破,线上教学正在面临教学组织、教学过程、教学考核等重大挑战。要求一线教师必须跟上时代的脚步,不断深化信息化教学改革,不断摸索信息化教学实践,在被动中主动作为,转变教学观念,提升在线教学能力,积极探索线上教学模式的改革创新,“潜移默化、润物无声”地融入思政元素,提高学生在线学习积极性,开展及时有效的互动,充分发挥线上教学模式的优势。
此外,受线上教学实验条件限制,“自动控制原理”课程教学仍多采用传统教学方法,强调“教”而忽视了学生动手,限制了学生自主学习和创新能力。由于课程涉及专业跨度大,如果只依靠文字和PPT开展教学活动则缺乏互动而影响教学质量。针对这些弊端有必要探索在“自动控制原理”课程教学中如何进行信息化资源库资源融合,构建线上/线下混合式教学模式,从教学方法、教学情感、教学内容等方面寻找课程思政融入的切入点,使学生根据需要,方便、快捷地获取教学资源进行自主学习,实现全面育人目标。
1.1 课程地位
“自动控制原理”是电气自动化专业的主干课程之一,也是信息、电子、通信、机械等相关专业的重要基础课程。控制系统设计的学习,不仅仅是表面上的数学逻辑推导,更是学习如何将科学、工程、数理的语言有效转换成控制系统的闭环思维过程。研究自动控制系统中的相关理论及系统分析方法,是后续诸如“过程控制系统”、“智能控制”等本科和研究生课程学习的理论基础,支撑着学生未来参与科学研究与工程挑战对控制系统设计能力的要求。
课程地位决定学习目标的规划,也影响教学内容的组织、过程和测评。混合式教学不会很大程度改变培养方案,即不改变课程的地位。此外,为后续课程的顺利开展,教学目标要具有逻辑性。但是混合式教学的线上部分,会导致教学形式发生相应变化。
1.2 变化面临的难题
尽管线上教学有利于降低教学成本,对于学习时间和地点诸多方面更具灵活性,但是线上教学因为无法与学生面对面而存在教学组织的困难,同时线上教学因为捕捉不到课上学生动作和表情的及时反馈而面临教学过程的困难,因无法有效实施监管使教学考核的难题和偏向于情感与责任等的思政元素直观呈现困难。如何解决在线形式教学难题,对完善混合式教学具有重要意义。
1.3 相关研究
针对混合式教学和课程思政育人方向,很多专家和一线教师在理论和实践层面进行深入探讨,并取得丰富的研究成果。
针对在线教学的各种困惑,文献[1]研究“危”,分析现状与关键问题,提出“机”。从关注教师自身如何“教”变成关注学生实际如何“学”,使在线教学中的诸多问题迎刃而解,并形成了以关注“学”为中心的计算机语言课程在线教学新模式。
在教学模式的研究与实践方面,文献[2]基于建构主义学习理论,创建了依托于小规模专有在线课程(SPOC)教学资源平台的线上/线下混合式教学模式,可解决学习成绩两极分化严重和课程学习参与程度不高的问题,提高学生学习的主动性和探究性。
在教学设计上,文献[3]进行了教学模式的探索与设计,从线上教学技术培训、线上/线下混合式教学模式构建、人文教育的有机融入、考评体系的完善等方面提供了线上教学的具体路径和措施。
1.4 本文所要解决的问题
现有研究明确指出混合式教学不仅仅是教学形式的改变,更是一种教学新模式,而如何利用好这种新模式提高学生学习效能和课程思政建设效果,改善教师教学实践是亟待解决的问题。
本文以“自动控制原理”课程为研究载体,以解决混合教学中的常见问题为线索,以学生的培养为出发点,重塑学习目标,夯实学习过程,强化隐性思政意识,研究开发以关注“学”为核心理念的自动控制原理课程混合教学新模式。
2 混合式教学模式下自动控制原理课程教学设计及思政育人
2.1 学情分析
“自动控制原理”作为电气自动化相关专业的专业基础课,涉及的内容非常广泛,涵盖高等数学、复变函数、电路和模拟电子技术等基础科目,因此学习难度大。学习“自动控制原理”主要解决两个问题:1)工程领域的复杂物理系统稳定性分析,包括时域法、根轨迹法和频域法,围绕3个性能指标,对控制系统进行分析;2)基于物理背景,利用机、光、电、液压元件或设备等解决控制系统的设计与综合。本课程的学习,帮助学生对经典控制理论建立全面的认识,能应用数学、自然科学、工程基础和专业知识对具体对象构造数学模型并求解,并针对机械工程领域的复杂工程问题进行过程分析、设计、制造、控制与优化。该门课程为后续“运动控制系统”及“智能控制导论”等课程提供理论基础。因此,“自动控制原理”在教学培养体系中占有重要地位。但是,本课程涉及知识点繁杂、内容抽象、理论性强,包含了大量的数学公式以及相关定理,教学难度较高。从课程的教学现状来看,学生对于控制理论的产生和发展过程不够了解;对于工业常用控制规律应用了解不多,不能很好地认识控制论的发展;对应到具体问题、具体情境上很难进行理论分析,无法真正做到将书本上的分析方法应用到实际系统中,达到学以致用的目的。此外,学生在学习过程中缺乏主动思考的精神,应试性目的较强,出现了只重视“知识传授”而忽视“价值传导”的现象。
本文以“自动控制原理”课程中超前-滞后校正设计为内容,展开混合教学模式下的课程思政育人路径设计。学习本课程前已学习掌握根轨迹和伯德图的画法,掌握系统校正和稳定裕度的基本概念,为本节超前-滞后校正学习奠定一定基础。
2.2 教学目标
知识目标:串联超前、串联滞后和串联滞后-超前校正的伯德图设计方法。
能力目标:培养学生综合设计能力,增强数形结合的思维意识。
情感目标:培养学生爱国情怀和团队意识,增强学生科研探索精神。
2.3 教学重、难点及处理
教学重点:计算系统关键技术指标,判断系统的性能好坏。
教学难点:串联校正环节的参数设计。
重、难点处理:串联校正通常附加放大器,以提高系统的增益。由于串联校正装置位于低能源端,从设计到具体实现都比较简单,成本低、功耗比较小,这是串联校正系统设计的优点,对应的缺点是参数变化比较敏感。因此,串联校正设计应留有足够的稳定裕度。
2.4 教学方法和手段
“自动控制原理”课程教学兼顾课程特点和学生情况,针对学生抽象思维能力的薄弱,通过多媒体展示的形式使学生直观、形象地了解控制系统的构成、控制器各个环节的物理功能。同时创设情境,以案例引入本节课开展教学,通过问题驱动来调动学生的主观能动性,激发学生学习热情,使学生参与课堂中。在讲授的同时辅以案例教学、问题驱动、小组讨论、讲练结合,通过思政案例教学方法引导、启发学生,使整堂课按照学生的思维规律循序渐进,实现以学生为中心的教学。具体混合教学模式总体框架如图1所示。

图1 混合教学模式总体框架
2.5 教学过程
1)依托国家需求,工程引入
精确的导航、制导和定位是航空航天技术的重要内容。惯性导航的精度主要取决于运动载体上的惯性元件精度,准确地说就是陀螺仪和加速度计的精度。所以提高惯性元件的精度对于提高整个惯性导航系统的精度具有十分重要的意义。测试转台(图2)作为惯性导航系统领域中仿真和测试的关键硬件设备,其性能的优劣直接关系到仿真和测试实验的可靠性与置信度。因此,设计高精度转台伺服系统对提高航空航天技术具有重要作用。为了获得转台控制系统的大刚度和高精度,在精密位置和速率系统设计时,需要提高系统型别。但是系统型别的增加会导致系统在大偏差时出现不稳定。因此,如何兼顾转台控制系统的高精度和强鲁棒性是当今航空航天技术的卡脖子问题。
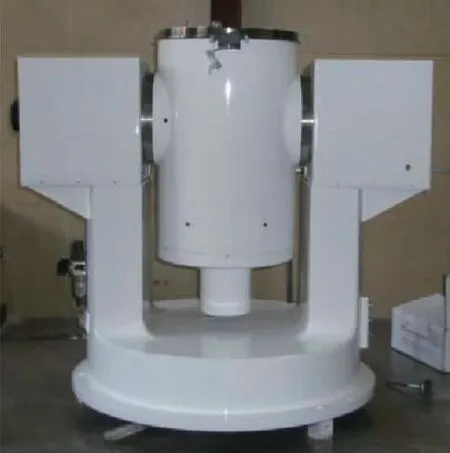
图2 双轴测试转台台体
2)问题驱动,创新技术
以图2所示的转台台面控制系统为例,为保证系统处于大偏差时的稳定性和快速归零,系统采用某II型控制器。为实现转台控制系统的大刚度和高精度,建议采用III型控制器[4]。如何平衡系统快速性和大刚度、高精度问题是本节要解决的关键问题。
a)粗控制器设计
粗位置控制器是为了保证系统大偏差时的稳定,对控制精度等并无过高的要求(满足粗、精切换的精度即可),因此采用测速机反馈加位置反馈的双环结构。一般在大偏差时,系统还要求以给定的速率运行到期望位置。为了实现这一功能,在位置环中引入饱和非线性网络,使大偏差时测速机环的输入处于某个固定的速率,此时系统的位置反馈不起作用,相当于运行在测速机状态。位置反馈系数取为1。综上所述可得粗位置控制器模式时的控制系统方框图如图3所示,其中力矩电机输出饱和力矩Tmax=10Nm,转动惯量J=0.164 10kgm2。

图3 粗位置控制器模式控制系统方框图
粗位置控制器的设计实质上主要是速度反馈内环的设计,而位置环仅起偏差大小的监督作用,以便决定是否切换。下面讨论位置控制的精控制器设计。
b)精控制器设计
精控制器是转台控制系统的核心,它不仅要求具有一定的带宽(大于10Hz),而且要满足系统要求的精度(±2″)和一定的动态刚度。由于该回路要求很高的精度,考虑到目前速度反馈的纹波噪声较大,系统中不应引入速度反馈而设计为基于精密测角系统的单位置反馈形式。控制系统原理结构如图4所示。由图可见,系统中引入一个纯积分环节演变为III型,其静态精度和刚度指标自然满足,因此设计时主要考虑其带宽和系统稳定性。

图4 精位置控制系统方框图
同理,α选得越小,则超前校正网络所能提供的补偿相角愈大;同时α越小,则系统开环幅频特性中第一个转折频率愈小,系统前向通道的方法系数设计值愈小,系统线性工作区愈大,这一点对精回路特别重要。
图5为该转台控制系统在台面阶跃输入r(t)=0.02°作用下的响应曲线。

图5 精位置阶跃响应曲线
c)系统动态刚度的考虑
选用III型系统,则系统的静态刚度为无穷大,但是实际上还是希望系统在阶跃干扰下的动态失调角尽量小。原则上系统带宽愈宽,则动态刚度愈大,动态失调角愈小。但在同样的剪切频率下如何获得最小的失调角?通过仿真可知,α选的越小,则同样干扰下的动态失调角越大,所以虽然α选的越小,获得的相角裕度越大,在选取α时还应充分考虑是否满足最大动态失调角的要求。
精位置控制器和粗位置控制器的状态依赖切换原则,形成混杂动态控制的概念。引导学生理解传统PID控制并融会贯通,例如,在这里改善传统PID控制,就能实现转台控制系统的双回路控制,其本质上是结合传统控制策略并利用混杂动态系统概念,解决高精度状态控制快速性和大刚度问题。
3)混合教学巩固知识
在混合式教学模式下,针对不易理解的定理类知识设计相应的应用题,让学生线上完成并反馈,即可查阅正确答案,从而加深学生对关键知识点的理解和掌握。例如串联校正在频率框架下和根轨迹框架下的表现形式,提高系统带宽和系统稳定裕度之间的关系,滞后校正提高相角稳定裕度的条件等。混合式教学在课程章节结束,通过试题库进行知识点测试,方便教师和学生及时了解自身学习情况并查缺补漏。
4)问题研讨与反思
测试转台的控制系统属于一类高精度伺服系统,它对系统控制精度有很高的要求,同时还要求系统具备较宽的系统带宽。与经典转台控制策略对比[5],为了获得大刚度和高精度,在精密位置和速率系统设计时,将系统设计为III型系统,这样的系统对给定和阶跃干扰都是稳态无差的。但是由于实际系统中难免存在饱和非线性特性,故此时系统为条件稳定系统,该系统在大偏差时会出现不稳定。为此大偏差时系统应采用另一种II型控制器来保证系统大偏差的稳定和快速归零。故精密位置控制系统应设计为具有双控制器切换的结构形式。采用数字控制可以很方便地实现这类非线性控制。具体精密位置控制的双控制器切换规则留待学生设计,激励学生思考。
2.6 思政育人
“自动控制原理”课程多逻辑和证明,课程思政的自然融入较难。本小节以卡脖子问题——高精度惯导测试设备运动控制问题引入,通过线上测试转台的工程应用案例,结合线上/线下小组讨论和互动探究,研究判断转台系统的刚度和精度问题,从而引出串联校正的要求,其过渡自然不生硬,同时引导学生理解混杂控制的概念。借助本小节的教学重点号召学生关注并参与攻克国家科学技术中的卡脖子问题,培养学生家国情怀,构筑工匠精神。通过II型和III型控制系统设计过程培养学生数学推导的缜密态度,小心求证的谨慎理念,工程规范的不苟信念,面对科学的敬畏精神。思政育人不能绕过应用背景,要通过思政与工程案例的结合,使自动控制理论更生动,获得学生的认同,做好思政育人。
3 结语
线上/线下的混合式教学模式是传统教学模式与现代化网络教学相结合的新型教学方法。其中,线上教学强调学生自学、线上互动交流以及思政材料的丰富呈现,线下教学强调知识重塑和内化,以及课程思政元素的融入。不难看出,随着社会的发展,传统教与学的关系正在慢慢地发生变化。教师在教学过程中除了完成传统的知识传授,还要完成引导和辅助学生自主学习,提升学生运用理论知识分析和解决实际问题的能力,培养学生高尚的道德情操和家国情怀。这种混合式教学新模式是对传统课堂教学模式的有益补充。
猜你喜欢
装备制造技术(2021年4期)2021-08-05
国学(2020年1期)2020-06-29
电子测试(2018年6期)2018-05-09
数学物理学报(2017年6期)2018-01-22
摄影之友(影像视觉)(2017年1期)2017-07-18
科教导刊·电子版(2016年30期)2016-12-26
知音励志·社科版(2016年11期)2016-12-20
大学教育(2016年11期)2016-11-16
科技资讯(2016年19期)2016-11-15
铁道通信信号(2016年12期)2016-06-01