
分拣并联机器人自适应滑模控制
2024-02-21 06:00高国琴
软件导刊 2024年1期
刘 涛,高国琴
(江苏大学 电气信息工程学院,江苏 镇江 212013)
0 引言
近年来,我国水果产量逐年增长,传统人工分拣方法效率低下,不利于现代农业的发展。实现机器人水果自动分拣以提高水果分拣效率、降低劳动强度、提高经济效益是现代农业发展的趋势。水果分拣工作可采用机械手完成[1],目前多采用Delta 机械手[2]添加UPU 支链[3]的方式实现SCARA(Selective Compliance Assembly Robot Arm)运动的分拣操作。然而,UPU 支链长时间处于工作空间边缘时损坏程度较大,会导致机械手控制精度降低。因此设计一款刚度大、精度高、承载能力强的串类水果分拣并联机器人十分必要[4]。
1 相关研究
针对串类水果分拣并联机器人末端负载变化强烈干扰、难以稳定运行的问题,国内外学者进行了诸多研究。例如,文献[5]针对并联机器人系统负载变化的问题,采用扩张状态观测器进行观测与补偿,根据状态估测设计了控制器,提高了并联机器人的抗干扰能力;文献[6]分析了机器人系统额定负载和空载两种状态下的伺服系统损耗情况;文献[7]针对末端执行器负载变化的并联机器人轨迹跟踪控制问题,在末端执行器中安装力传感器以测量负载变化,并提出一种超螺旋滑模控制方法,仿真结果证实了其有效性。然而,以上控制方法均未能在末端负载大范围变化的情况下确保串类水果分拣并联机器人良好的轨迹跟踪性能。为此,本文通过解决系统负载转动惯量在线辨识和末端执行器负载变化的自适应滑模控制两个关键问题,以此达到对串类水果分拣并联机器人的高性能控制。
并联机器人在分拣不同种类的串类水果时质量会发生变化,即使拾取同种类的水果也难免会发生缠绕等情况,负载变化具有不确定性,直接影响单通道系统的负载转动惯量[8],给机器人控制带来困难。如何实现系统负载转动惯量的在线辨识是关键难题,为此国内外学者们尝试了各种方法,例如文献[9]提出的卡尔曼滤波器对时变数据和系统状态的估测具有很好效果,其是一种随机状态估计器,但卡尔曼滤波算法需要设计各种假设条件,计算量大且复杂,影响了其在日常控制系统中的普及;文献[10]采用的最小二乘法及其衍生算法相对简单,但仅能保障系统估计量误差和处于最小水平,无法实现误差的最优分布,因此无法用于精度控制;文献[11-12]中的状态观测器法可以估测电机的瞬时状态,但没有较强的抗干扰能力,在复杂操作环境中位置检测可能会出错;文献[13-15]中的梯度校正参数辨识算法对于同步电机这种存在较多变量的设备可进行参数变换,在每次计算与收敛时耗时较短、速度较快,拥有优良的性能。
为提高串类水果分拣并联机器人的抗负载能力,必须选择合适的控制方法。模糊逻辑控制方法虽然具有抗负载变化的能力,但在应用中很难消除系统稳态误差,控制精度不高[16-17];人工神经网络具有自适应、自组织、自学习能力,然而算法复杂程度高[18-19];鲁棒控制通过将末端执行器的负载变化作为干扰进行抑制或补偿,但难以有效应对负载变化[20-21];滑模控制是一种设计非线性不确定系统鲁棒控制器的有效方法,其对控制通道中的参数变化具有鲁棒性和动态性能好的优点[22-23]。
为此,本文针对串类水果分拣并联机器人存在负载变化及支路不确定性等问题运用滑模控制方法,并根据滑模变量设计对于不确定性变化具备较强适应能力的自适应规则,以克服负载变化的影响;同时有效抑制滑模控制切换增益过估计带来的抖振,以期增强系统对于负载变化的鲁棒性。
2 串类水果分拣并联机器人
2.1 机构简述
串类水果分拣并联机器人实物如图1 所示,包括动静平台和4 组正交布置的R-(2-SS)(R 为旋转副,S 为球副)支链。为减轻运动部件质量,主动臂和从动臂的主要制作材料为碳纤维,动平台的主要制作材料为铝合金。动平台由主、辅两个平台构成,通过转动机构连接主平台和辅平台,转动机构由通过轴承转动连接在主平台上的丝杠和固接于辅平台上的螺母两部分构成。

Fig.1 Physical entity of string fruit sorting parallel robot图1 串类水果分拣并联机器人实物
2.2 运动学分析
为了更好地实施运动学分析,进一步简化串类水果分拣并联机器人的设计,使之成为如图2所示的等效机构。

Fig.2 Kinematic equivalent mechanism of string fruit sorting parallel robot图2 串类水果分拣并联机器人运动学等效机构
基于静平台的中点创建参考坐标系O-xyz,将该坐标系下的主平台和辅平台分别作为质点P1和P2,因此P1(P2)的矢量r可表示为:
式中:s为P1点到P2点的长度;e为主动臂转轴到静平台中心的长度;l1、l2分别表示支路i主、从动臂的杆长度;ui、wi分别表示主动臂和从动臂的单位矢量。其中ui表示为:
式中:θi为主动臂i的转角。根据机构的装配方式便能列出运动学逆解方程:
式中:分别表示为坐标系O-xyz各坐标轴上的单位矢量。
由式(2)和式(3)可求出wi:
将式(1)左右两端分别对时间求导,整理可得:
将式(5)两端点乘wiT并写成矩阵形式,可得速度模型为:
式中:J、Jθ与Jx分别表示雅克比矩阵、直接与间接雅克比矩阵;。
通过式(5)对于时间的求导,可求出加速度模型的计算公式:
2.3 动力学分析
为构建串类水果分拣并联机器人的动力学模型,本文作出如下假设:①各运动副之间工作过程中产生的摩擦无能量损失;②从动臂质量较小,转动惯量也较小,可按照1∶2的比例将质量分配给动平台与主动臂。
基于虚功原理,可作如下计算:
式中:τ表示主动关节的驱动转矩;τAg表示主动臂对其转轴的重力矩;IA表示主动臂传递给转轴的转动惯量等效值;表示动平台转动丝杠的角加速度;Is表示丝杠与负载转轴的转动惯量。
代入δθ=Jδr与δθs=(2π/p)δs,经过计算可以得到关节空间的动力学模型:
M(θ)为4 × 4 的对称正定矩阵,称为惯量矩阵。末端执行器负载的变化会引起M(θ)的改变。
驱动关节的等效惯量为:
施加在电机轴上的等效负载惯量为:
交流伺服电机的数学模型可表示为驱动轴的角位移θout与输入转速ωd的传递函数:
式中:Rph、LD分别表示定子绕阻和电枢电感;Kpi、Kpv分别表示电流环和速度环增益;KE为感应电动势常数;Kii、KT、αT分别表示电流反馈系数、转矩系数以及测速反馈系数;J(t)=J+J',J表示负载转动惯量,J'表示电机转子转动惯量。
2.4 梯度校正参数辨识算法
梯度校正参数辨识算法建立在梯度函数理论的基础上,校正原则为基于准则函数的负梯度方向进行搜索,修正模型参数的估计值,保障准则函数最小化[22]。
永磁同步电机主要包括转子与负载两部分[23],机械运动可用公式表示为:
式中:wm表示转子机械角速度,Tem表示电机电磁转矩,TL表示负载转矩,J表示负载施加于电机轴上的总转动惯量,B表示粘性阻尼系数。
将式(10)离散化为:
式(11)可进一步转化为:
则式(11)可表示为:
Ts为运用梯度校正惯量辨识算法进行采样时转速与电磁转矩所需的采样周期。由于惯量辨识所需的周期较短,采样频率必须足够高,离散化不易造成失真,无需考虑,得出公式(18):
由文献[6]可知梯度校正参数辨识的实用公式为:
式中:(k-1)=[(k-1)(k-1)(k-1)]T;α、β分别表示两个修正参数与待辨识参数,根据即可求出负载的转动惯量J。
3 控制器设计
3.1 自适应律设计
不确定非线性系统表示为:
式中:x∈χ表示系统状态向量,χ⊂Rn表示存在原点的领域,u∈R表示控制输入,f(x)表示存在不确定性参数的光滑函数,g(x)表示易为外界扰动影响的光滑函数。函数f(x) 与g(x) 无明确的界,g(x) ≠0 可以控制全部的(x,t) ∈χ系统,使得滑模变量s于短期内接近零的领域。假设S与控制输入u将相对阶保持为1,则:
为方便起见,下文将简化这些函数的表达(S、ψ、Γ 中x与t将省略)。假设函数ψ和Γ 有界,但该界未知,不失一般性地有:
非线性不确定系统中,滑模变量可通过式(20)来计算。反馈控制律u(t)可表示为:
将式(22)代入式(20)中,得到:
式中:sgn表示符号函数,K表示切换增益。
为弥补现有自适应律的不足之处,本文还制定出一种新的自适应率,即积分指数自适应律,表示为:
式中:α>0,ε>0,β>0,μ>0,γ为正整数。当β=0时,自适应律经过简化变为积分自适应律[6]。
3.2 自适应滑模控制器设计
本文设计的串类水果分拣并联机器人转动惯量自适应滑模控制原理如图3 所示。该控制器主要由自适应切换增益和转动惯量在线辨识两个模块构成。自适应切换增益基于滑模变量设计而成,主要作用是克服串类水果分拣并联机器人因末端负载变化问题引起的支路间不确定影响。由于滑模控制需要高切换增益,设计的自适应律需有效抑制抖振。转动惯量在线辨识的主要作用是克服串类水果分拣并联机器人受到的外部负载扰动影响。伺服系统的转动惯量变化范围大,采用梯度校正算法实时辨识负载转动惯量的大小,并在控制器当中形成补偿,可提高系统的鲁棒性和抗干扰能力。
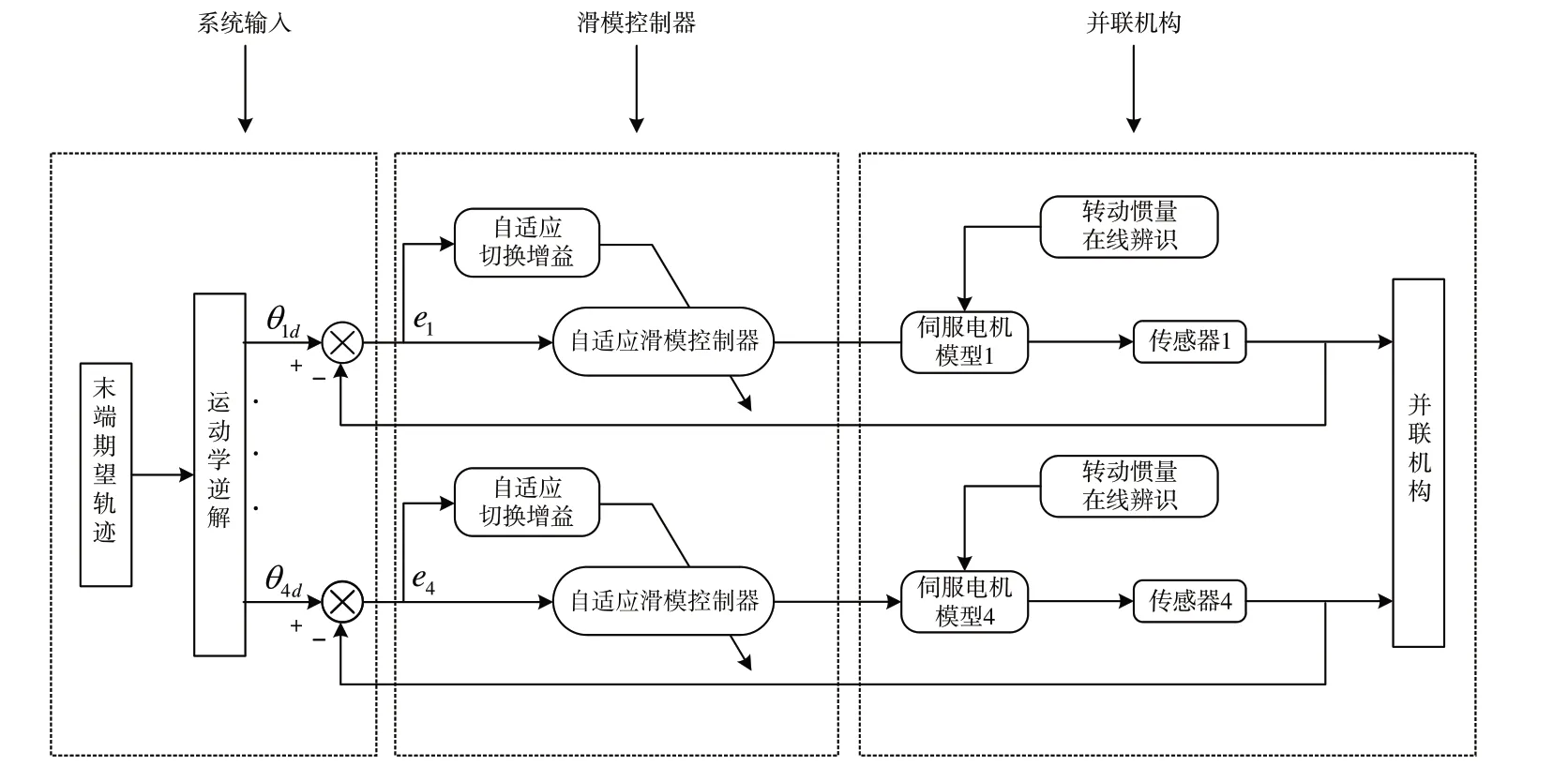
Fig.3 Motion control principle block diagram of series fruit sorting parallel robot mechanism图3 串类水果分拣并联机器人转动惯量自适应滑模控制原理框图
为更有效地控制不同支路的交流伺服驱动电机及相关驱动器,为支路搭建相应的数学模型。表示为:
在单支路控制系统中,滑模变量s为:
可得:
式中:ρ(t)表示集总不确定项。
滑模变量动态方程为:
控制律u表示为:
当=0时可推导出:
将式(31)代入式(28)可得:
综上,总的控制律为:
3.3 稳定性证明
此次设计的积分指数自适应滑模控制(Integral Exponential Adaptive Sliding Mode Control,IEG-ASMC)分为两个阶段,即补偿与趋近阶段。在补偿阶段,当切换增益K小于ψsgn(s)/Γ时有:
由式(23)和式(34)可得:
因此,|s|非减。根据式(24)和Γ>0,有:
由于|s|非减,由式(24)可知(t)将会补偿式(36)右侧的上界,K最终会于有限时间t*内对ψsgn(s)/Γ 进行补偿。任何|s|>ε皆会产生最终时刻t*≥0,因此:
对于任何t≥t*,如果发生了ψsgn(s)/Γ 比切换增益K更大的情况,K将会对ψsgn(s)/Γ 作进一步补偿。因此,t*≥0 会一直存在,滑模变量s符合|s|>ε要求,(t)仍会持续增加,保持一般性,存在κ>0 和δt>0,对 于t≥t*+δt,则有:
补偿阶段结束后,系统轨迹进入趋近阶段。Lyapunov函数的构建公式为:
基于所有t≥t*+δt,有:
式中:在t*+δt和t≥t*+δt间采用积分,以便使|s|于限定时间内向领域|s|≤ε收敛。
4 仿真试验结果分析
为保证系统转动惯量能准确有效地完成在线识别,需严格校验IEG-ASMC 算法的准确性率和有效性。在设计和开发串类水果分拣并联机器人时需要为工作空间设计出门字形运动轨迹,根据动力学模型分别计算出在线和非在线识别到的电机惯量参数J与J',根据平均值和进行自适应滑模控制器设计。具体过程如下:分别对本文提出的IEG-ASMC 方法与文献[6]中的自适应滑模控制(IGASMC)方法、切换增益恒定的滑模控制(SMC)方法在如图4 给定的期望轨迹下,以J作为电机惯量参数、Jˉ为自适应滑模控制设计参数进行仿真。根据电机模型参数和伺服驱动器设置公式(25)中参数为Rph=18Ω,Kpi=15,Kii=1,LD=0.052 5H,KT=1.25N·m/A,aT=0.1,Kpv=0.08,KE=1.215;自适应滑模控制器参数为c1=2 500,c2=50,α=0.01,ε=2g(x)KTe,Te=0.001,β=1.5,μ=0.01,γ=1。仿真结果如图5 所示。可以看出,本文方法在保证良 好跟踪性能的前提下可有效削弱滑模控制的抖振问题。
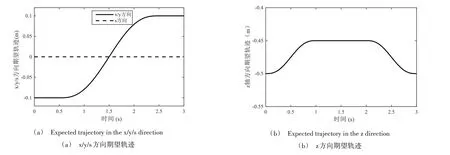
Fig.4 The desired trajectory of the end effector图4 末端执行器位姿各分量期望轨迹

Fig.5 Simulation results图5 仿真结果
比较辨识与不辨识两种状态下电机的跟踪误差,结果 见图6。可以看出,本文方法有效提高了系统跟踪精度。
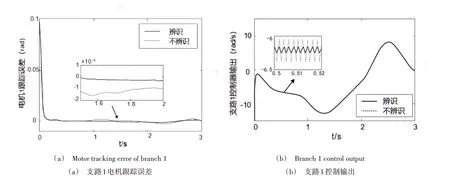
Fig.6 Verification of online identification of load moment图6 在线辨识负载转动惯量验证
5 验证实验
本文采用分布式结构建成串类水果分拣并联机器人控制平台。上位机(Personal Computer,PC)主要负责系统初始化、代码编译和人机交互以及状态的监控等功能;下位机(Universal Motion and Automation Controller,UMAC)主要负责数据的整理、数模之间的转换和运动控制等指令。PC 与UMAC 通过以太网(Ethernet)进行通讯。所搭建的串类水果分拣并联机器人的整个程序流程是:在上位机当中编写相关程序,整理所需参数的设定,将指令发送给下位机;下位机接收指令,并对数据进行计算和处理,利用板卡把指令发送给驱动系统,串类水果分拣并联机器人的伺服电机在接收指令后完成相关运动;上位机接收力传感器检测的压力结果,整理编码器采集到的电机信息;下位机控制完成后把结果送回上位机。
在以往的滑模控制当中,为了满足机器人系统的高性能控制,经常设计定值增益或无指数项的自适应律。在选用切换增益的同时必须满足其高于不确定性的上边缘,进而可以对负载扰动实时补偿,但在生产应用中此信息不容易得到,导致机器人系统的性能不佳。本文设计的自适应律可以降低系统的不确定性,同时也能很好抑制抖振。实验结果表明,本文方法的电机最大误差为1.19 × 10-2rad,其他方法的电机最大误差为 3.26 × 10-2rad、1.38 × 10-2rad、1.56 × 10-2rad,误差均较大。说明本文方法能够克服负载变化和系统不确定性作用,提高串类水果分拣并联机器人的控制性能。
6 结语
串类水果分拣并联机器人分拣不同种类的串类水果时质量会发生变化,从而导致负载变化具有不确定性,直接影响单通道系统的转动惯量,进而影响机器人系统的控制精度。针对该问题,本文在分析电机机械运动方程的基础上采用梯度校正参数辨识算法,沿着准则函数的负梯度方向不断进行搜索,并修正参数的估计值,保障准则函数最小化,以此在线辨识系统转动惯量的大小,增强系统对于负载扰动的鲁棒性。为解决其不确定性上界难以获取的问题,基于在线辨识系统转动惯量的支链电机模型,引入滑模控制方法并设计积分指数自适应律,使其在近滑模面迅速有效调整滑模切换增益,提升了系统鲁棒性,并抑制了滑模控制抖振,提升了串类水果分拣并联机器人的水果分拣效率。由于串类水果分拣并联机器人存在耦合问题,会在一定程度影响其运行效率,后续可对该方面进行重点研究。
猜你喜欢
中学生数理化·中考版(2021年10期)2021-11-22
高师理科学刊(2020年2期)2020-11-26
四川工商学院学术新视野(2020年2期)2020-08-13
中国惯性技术学报(2019年6期)2019-03-04
测控技术(2018年4期)2018-11-25
测控技术(2018年3期)2018-11-25
中国环境监察(2016年7期)2016-10-23
通信电源技术(2016年1期)2016-04-16
通信电源技术(2016年5期)2016-03-22
振动、测试与诊断(2014年4期)2014-03-01
