基于COOT 优化算法和改进型重复PI 控制的三相LCL 型光伏并网系统
2024-02-06 11:22:00杨春辉屈莉莉戴宏跃
佛山科学技术学院学报(自然科学版) 2024年1期
杨春辉,屈莉莉*,廖 慧,戴宏跃
(1.佛山科学技术学院机电工程与自动化学院,广东 佛山 528225;2.广东创电科技有限公司,广东 佛山 528000;3.广州科技贸易职业学院 智能制造学院,广东 广州 511442)
2020 年9 月,中国在联合国大会上提出了“双碳”目标:在2030 年之前实现“碳达峰”以及在2060年之前实现“碳中和”的目标[1]。在“双碳”目标的引导下,光伏产业并网发电在政策扶持和鼓励下迅速发展。光伏阵列的最大功率跟踪(MPPT)和光伏并网逆变器是光伏产业并网发电系统的重要环节,光伏并网系统由光伏阵列和并网逆变器两个部分组合而成[2]。两级式光伏并网系统通常利用前级DC/AC 电路完成MPPT,实现光伏阵列最大功率输出,然后再经过后级DC/AC 电路并入到公共电网[3]。作为太阳能光伏发电系统与电网互连的关键接口装置,MPPT 和光伏并网逆变器控制策略直接决定系统并网运行的可靠性和安全性。
传统MPPT 方法(如电导增量法INC、扰动观察法P&O)虽然有很好的局部寻优能力,但是需要按照一定步长进行追踪,步长过大会出现功率振荡,步长过小追踪到最大功率点的时间过长,而且在局部遮挡情况下,传统MPPT 方法还很容易陷入到局部最优[4]。近年来出现的人工智能算法(如蚁群算法、灰狼算法、白冠鸡优化算法等)以其超强的全局搜索能力成为学者们关注的热点。
并网逆变器的逆变器桥输出电压中含有丰富的开关谐波,需要在逆变器中引入滤波器,LCL 型滤波器与L 型滤波器相比具有更好的谐波抑制能力和衰减特性,因此被广泛应用于并网逆变器[5]。考虑到LCL 滤波器是一个三阶系统,存在谐振尖峰,需要合适的阻尼策略来稳定系统。常用阻尼策略可分为:无源阻尼和有源阻尼,无源阻尼采用串联或并联阻尼的方式增加系统阻尼,但该方法会带来额外的功率损耗;有源阻尼从控制策略的角度解决谐振尖峰,通过虚拟阻尼进行状态反馈,实现谐振尖峰抑制,比如电容电流反馈阻尼控制,但是需要额外增加电流传感器[6]。对于并网电流的控制,常见的控制策略有PI 控制、PR 控制、重复控制等。文献[7]指出PI 控制具有结构简单、算法成熟等优点,但对正弦量给定无法做到无静差跟踪;文献[8]采用电流比例谐振(PR)控制,省去了坐标变换,但由于使用比例谐振控制器的个数较多,不仅增加了计算量,而且系统变得更复杂;文献[9]指出重复控制有良好的稳态特性,能够抑制周期性干扰,但在动态响应过程中由于延迟了一个基波周期,当系统给定发生变化时,动态性能较差;文献[10]提出基于重复控制+PI 控制复合控制,弥补了重复控制动态性能较差的缺点,但建模过程忽略采样计算延时带来的影响。
针对传统MPPT 算法追踪到最大功率点所需时间长以及容易陷入局部最优的问题,本文提出一种基于COOT 优化算法。通过对白冠鸡种群进行层级划分,适应度值高者为种群领导者,其余为跟随者。跟随者具有两种位置更新方式,分别为主动更新和被动更新。主动更新过程中,跟随者根据链式运动或随机运动更新位置,并不依赖领导者;在被动更新过程中,跟随者需要向领导者方向发生靠拢,种群需要朝着最佳区域前进,因此在跟随者向领导者靠拢的同时,领导者也要同时不断调整自身位置向最优区域靠近。通过这两种位置更新方式,可以使得在追踪功率的时候避免陷入到局部最优。
针对LCL 在高频处会带来一个较大的谐振以及考虑到在实际生产过程中,厂家一般在逆变器侧加入电流传感器来实现过流保护,为了节约成本,本文提出仅采用逆变器侧电流反馈的有源阻尼控制策略。为了避免求解三阶系统特征根带来的数学限制,通过分析三相LCL 等效电路,不同于用传统伯德图进行分析,本文提出基于阻尼因子的设计方法。在数学建模过程中,把PI 控制和采样计算延时加入到有源阻尼高频谐振抑制中一起建模,然后在这个基础上再加入重复控制。为了减少奇次谐波,内模只选取周期采样次数的1/2,搭建出基于奇次基波级联式结构的重复PI 控制策略的并网逆变器。考虑到在实际中电网频率会出现一定波动,利用拉格朗日插值法逼近内模的小数部分,得出基于幂级数展开的分数延迟滤波器,通过该滤波器可以使重复控制的内膜更贴近实际电网基波频率,从而提高控制器的谐波抑制性能。
1 最大功率点跟踪
图1 为COOT 优化算法的MPPT 系统框图,其由5 块光伏阵列组件、Boost 升压电路、COOT 的MPPT 控制算法、PWM等构成。
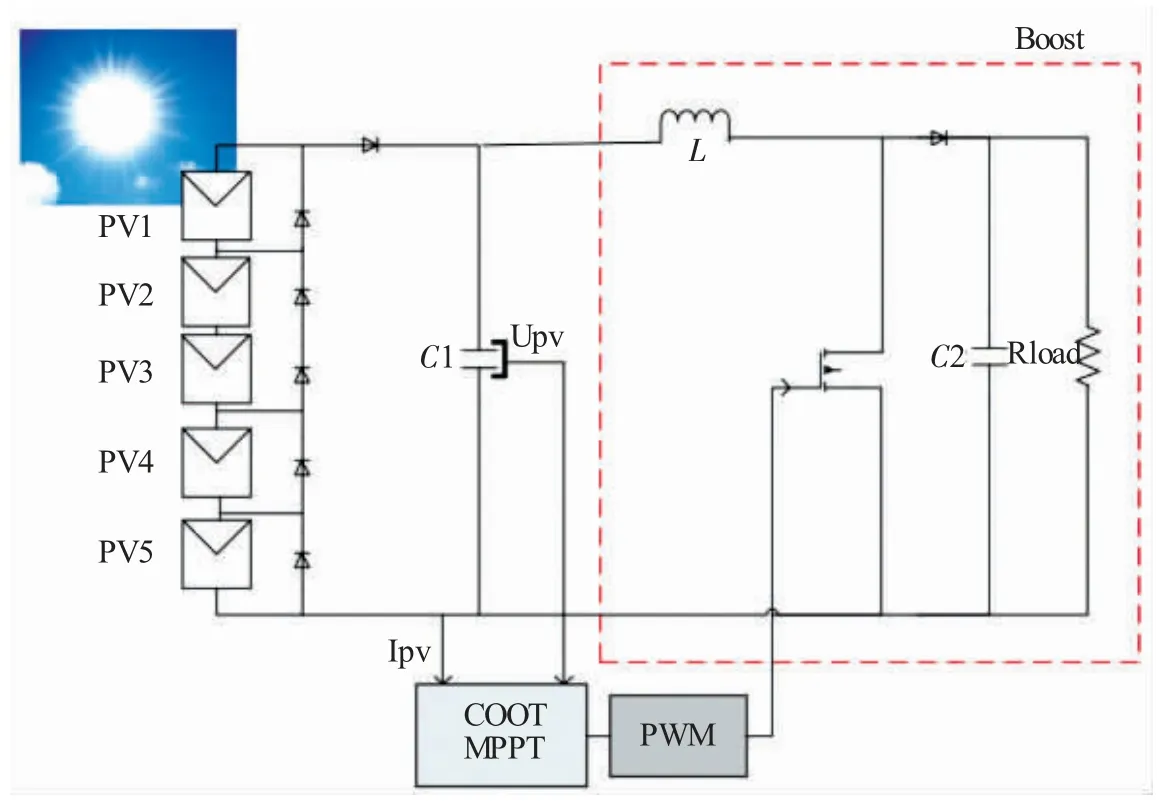
图1 COOT 优化算法的MPPT 系统框图
1.1 COOT 优化算法原理
COOT 优化算法主要模拟白冠鸡在自然界中获取食物的行为,从而实现算法寻优的目的[11]。
1.1.1 初始化
假设白冠鸡种群大小为N,从白冠鸡种群中选取10%的个体为白冠鸡的领导者,记为LeaderPos,剩余的白冠鸡为跟随者,记为FollowPos。对白冠鸡种群位置(包括领导者以及跟随者)进行初始化处理,即
其中,CootPos(i)表示第i 只白冠鸡的位置,ub 和lb 分别表示搜索空间的上界和下界,rand 为0 到1 的随机数。
1.1.2 跟随者位置主动更新
当一个取值范围为[0,1]的随机数rand1>0.5,白冠鸡跟随者将选择主动更新策略,主动更新策略包括两种运动方式,通过一个取值范围为[0,1]的随机数rand2 来决定采用哪一种运动方式。
(1)随机运动。当rand2<0.5,跟随者进行随机运动,为了体现运动的随机性,首先在位置空间生成一个随机位置Q,其数学公式为
随机运动有利于算法跳出局部最优解,使用这种方法更新白冠鸡跟随者位置的计算表达式为
其中,FollowPos(i)表示第i 个跟随者的位置,R1是区间[0,1]中的随机数,参数A 为[0,1]中线性递减的因子,t 为当前迭代次数,Iteration 为最大迭代次数。
(2)链式运动。当rand2>0.5,执行链式运动,算法将相邻两只白冠鸡中间位置实现链式运动,其数学公式为
其中,FollowPos(i-1)是上一只白冠鸡跟随者的位置。
1.1.3 跟随者位置被动更新
当一个取值范围为[0,1]的随机数rand1<0.5,白冠鸡跟随者将选择被动更新策略。通常情况下,白冠鸡跟随者根据白冠鸡领导者的位置调整自已的位置并且朝着它们的方向移动,利用k 来控制白冠鸡领导者的位置引导,即
其中,i 是跟随者的索引数,k 是领导者的索引数,mod 是取余函数。跟随者随领导者的位置更新公式为
其中,LeaderPos(k)为第k 个领导者的位置,R 和R2为区间[0,1]的随机数。
1.1.4 领导者带领跟随者走向最佳区域
白冠鸡种群的领导者不断更新它们朝着最佳区域目标方向的位置,从而带领白冠鸡跟随者种群走向最佳区域,白冠鸡领导者的位置更新计算表达式为
其中,LeaderPos(i)为第i 个领导者的位置,gBest 为种群最优位置,R3和R4为区间[0,1]的随机数,参数B 为在[0,2]中线性递减因子。
1.2 COOT 优化算法的MPPT 流程
(1)实时采集光伏阵列光照强度和环境温度,然后得到光伏阵列输出特性曲线(P-U 曲线);
(2)利用COOT 算法进行搜索,追踪到光伏阵列工作在全局最大功率点处的功率,最终得到最佳电压;
(3)通过PWM控制Boost 电路,使得光伏阵列工作在全局最大功率点处(Boost 电路通过控制占空比来调节电压,由于电压跟功率是有对应关系的光伏阵列曲线,得到最佳占空比即得到最佳电压即得到最大功率);
(4)当使用COOT 算法追踪GMPP 时,考虑到外部光照或者温度会发生变化,光伏阵列输出特性曲线会发生偏移,GMPP 的位置也可能发生变化,为降低功率损失需要重新启动COOT 算法进行追踪。本文设置功率变化情况满足下式就重启算法
本文算法的具体步骤为:
(1)初始化COOT 算法的参数,包括:设置白冠鸡数量N=50,其中,白冠鸡领导者的数量LeaderPos=5,白冠鸡跟随者的数量FollowPos=45,最大迭代次数Iteration=15,以及初始化白冠鸡种群的位置;
(2)将采集到电压、电流值进行采样;
(3)判断迭代次数是否满足迭代跳转次数15 次,若满足则转至步骤(6);
(4)计算一开始设置白冠鸡领导者和白冠鸡跟随者对应的适应度值(适应度值即功率),找出白冠鸡种群个体的最优位置gBest(位置即占空比);
(5)把第一轮得到的最佳适应度值和最佳位置代入到位置更新中,产生随机数rand1 和rand2;若rand1>0.5,跟随者进行主动更新,并不依赖领导者,当rand2>0.5,跟随者进行链式运动,当rand2<0.5,跟随者进行随机运动;若rand1<0.5,跟随者进行被动更新,跟随者需要向领导者方向发生靠拢。种群需要朝着最佳区域前进,因此在跟随者向领导者靠拢的同时,领导者也要同时不断调整自身位置向最优区域靠近;
(6)记录本次迭代中的最佳适应度值;
(7)计算本次迭代更新的适应度值与目前找到的最佳适应度值是否满足式(8),若不满足则转回步骤(1);
(8)测量到最佳适应度值即为全局最大功率,结束算法。
基于COOT 的MPPT 控制算法的流程图如图2 所示。
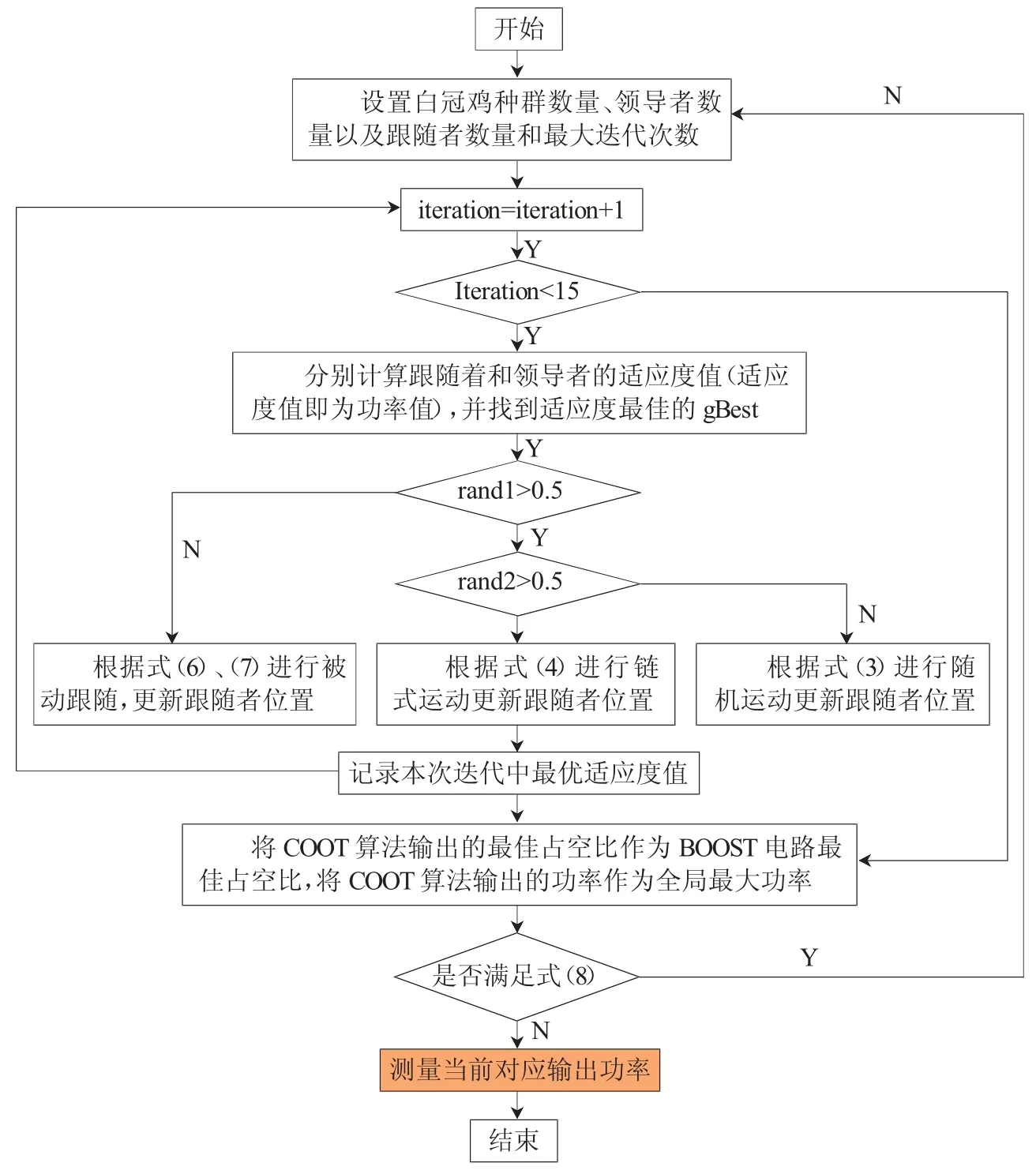
图2 基于COOT 的MPPT 控制算法的流程图
2 LCL 高频谐振抑制
为了抑制LCL 高频谐振,在过去10 年里,基于状态变量的主动阻尼控制策略被广泛提出[12]。在实际生活中,工厂生产的并网逆变器通常将逆变器侧电流传感器与逆变器产品集成,以实现过流保护为目的。仅采用逆变器侧电流反馈不仅可以节约成本,还可以避免三相LCL 在DQ 变换解耦时需要进行复杂的数学运算,同时为了避免求解三阶系统特征根时的数学限制,提出基于阻尼因子的设计方法。在数学建模过程中加入采样计算延时以及PI 控制,通过后续推导验证设计的主动阻尼控制策略与实际被动阻尼控制策略的效果相同。
2.1 LCL 并网逆变器无源阻尼控制策略
无源阻尼控制策略较容易实现,而且不需要增加额外的控制手段,但需要引入阻尼电阻R,导致有功功率的损耗,通常情况下在逆变器电感上串联R;考虑到三相LCL 的状态反馈跟单相LCL 状态反馈大致类似,为了简化本文就以单相LCL 进行数学建模,该控制方法拓扑图及其结构框图如图3 所示。

图3 无源阻尼拓扑和结构框图
按照图3 所示,以逆变器侧电压Vinv为输入,网侧电流ig为输出,则LCL 传递函数为
由式(9),可以得到阻尼比为
根据式(9)可知,R 值越大,其阻尼控制的效果越好。当R 值过大时,LCL 对高频谐波的抑制效果明显,同时R 产生的有功损耗会进一步增大;当R 值较小时,其抑制固有谐振的能力变弱。因而确定R 值需综合考虑对滤波器的固有谐振抑制以及高次谐波的抑制要求。
2.2 LCL 并网逆变器有源阻尼控制策略
图4 为三相LCL 并网逆变器有源阻尼控制图,逆变器侧电感为L1、电网侧电感为L2、滤波电容为C以及电网阻抗为Lg,忽略所有的等效串联电阻确保系统无被动阻尼,其中LT=L2+Lg,测量电网电压以进行锁相环同步,测量逆变器侧电流并向有源阻尼提供一个附加阻尼GS的控制器,Gc(s)为PI 控制器以跟踪参考电流,而且还考虑到采样计算调制会带来Gd(s)=e-1.5sTs的延时。
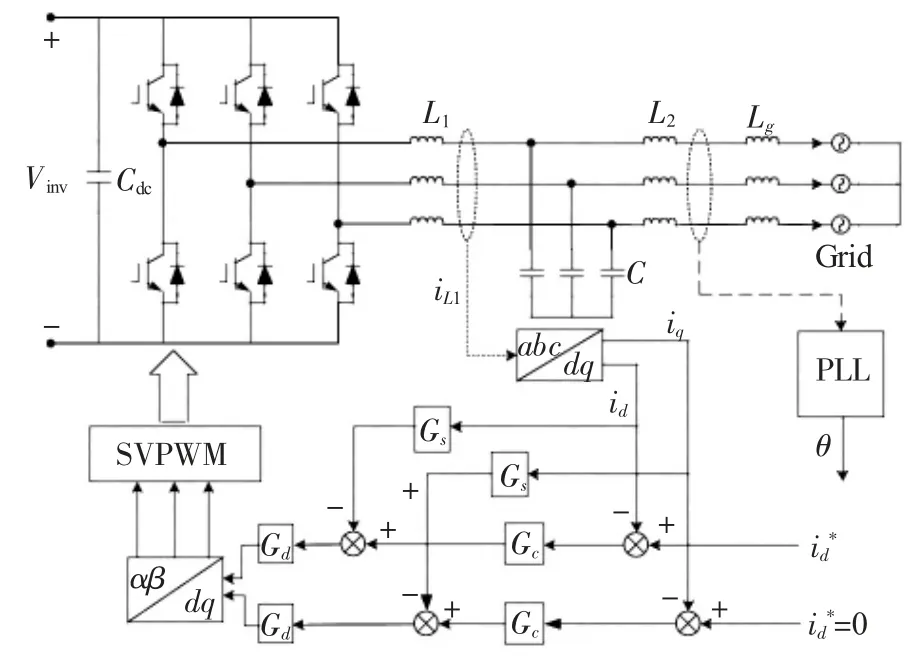
图4 三相LCL 并网逆变器有源阻尼控制图
根据图4 画出其有源阻尼控制框图,如图5 所示,考虑到d 轴跟q 轴一致,本文只拿d 轴进行数学分析,并考虑到逆变器增益KPWM。

图5 三相LCL 并网逆变器有源阻尼控制框图
按照图5 所示,以逆变器侧电压Vinv为输入,网侧电流iL2为输出,则GLCL1(s)传递函数为
从式(11)可以明显看出,逆变器侧电流的有源阻尼控制策略存在两个阻尼源,一个是系统本身固有阻尼kp,另一个是本文加入的附加阻尼GS。
主动阻尼控制策略若想与实际被动阻尼控制策略产生谐振抑制效果一致,式(9)应与式(11)等价。为简化计算,本文先忽略时间延迟,阻尼增益K=GS+kp和阻尼电阻R 之间的关系可用下式表示,即
当考虑延迟的时候,式(11)分母二次项引入指数e-1.5sTs将影响到开环极点的分布,为了将有源阻尼控制策略与无源阻尼控制策略等效,需要等同于在实际被动阻尼电阻R 上再串联一个虚拟阻抗Z(s),如图6 所示。
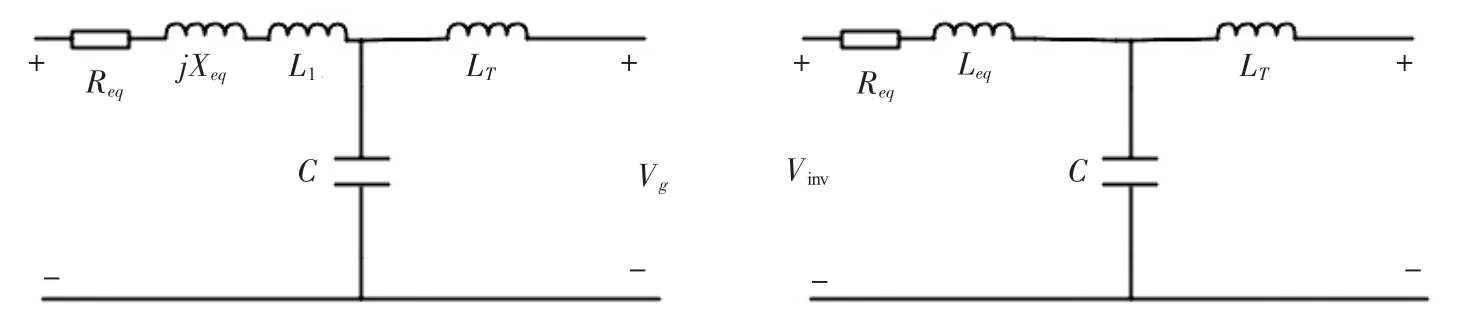
图6 串联阻抗后无源阻尼等效控制框图
Z(s)可表示为
把s=jw 代入,则Z(s)化简为
令
根据上述公式可知,虚拟阻抗Z(s)由虚拟电阻器Req和虚拟电抗器jXeq表示。将电感L1与jXeq合并,形成等效电感器Leq,即
串联虚拟阻抗后,实际无源阻尼的LCL 谐振频率wr'为
根据式(10)得出串联阻抗后无源阻尼的阻尼因子为
通过前面分析得出阻尼因子应该是越大越好。
比例增益kp取决于串联电感、交叉频率wc(一般取值为0.3 wr)和直流母线电压,kp和积分时间常数计算公式分别为
计算得到kp=0.06,ki=0.004 4,根据前面分析,当K=0.092 时,存在最佳阻尼因子,附加阻尼Gs=K-kp=0.032;把计算后的参数代入进行仿真;联立式(13)、(15)、(16)、(17)、(18)、(19),作出阻尼增益K 与阻尼因子ζ 的函数关系图,如图7 所示。
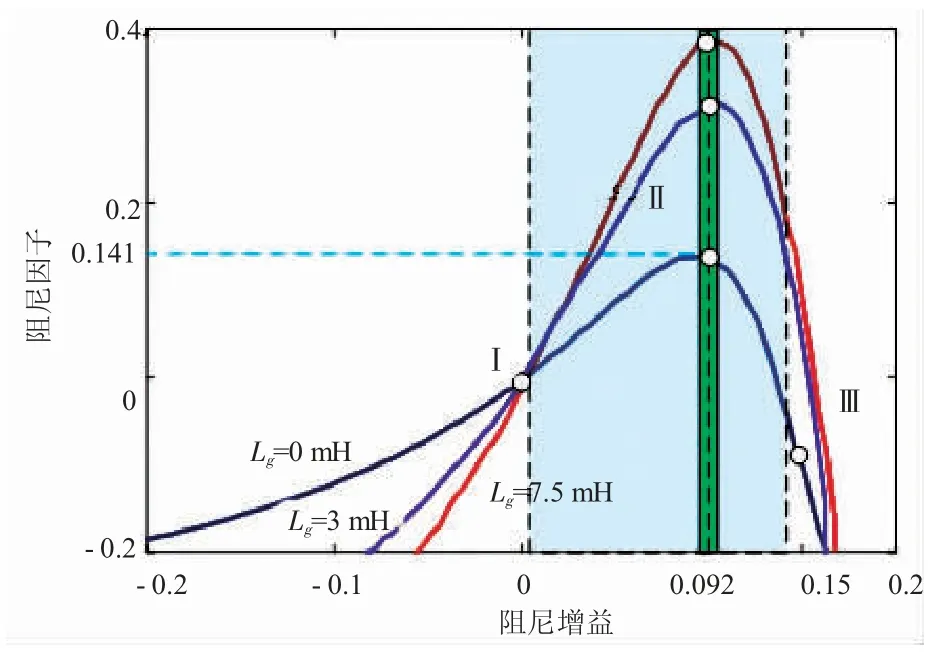
图7 阻尼增益与阻尼因子函数关系图
由图7 可看出,当K=0.092 时,电路处于最佳阻尼因子状态,可以提供最佳的阻尼能力和更大的稳定裕度。随着Lg变化,电路由刚性网络变换成弱性网络,K 的稳定区域扩大,最佳阻尼因子从0.141 提高到0.4,但最佳阻尼因子K 没有变化。由图8 可以看出,随着电网阻抗增加,LCL 谐振峰值变更加平滑,且增益裕度一直大于0 dB,系统保持稳定;证明该有源阻尼控制策略在刚性网络和弱性网络都具有良好的鲁棒性。
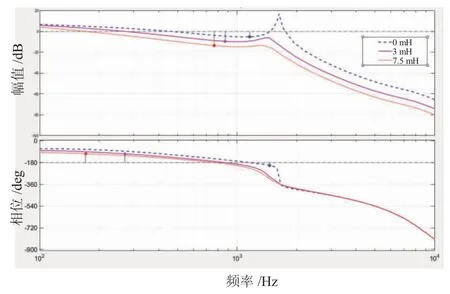
图8 不同Lg 下频率响应曲线
3 级联式重复PI 控制设计
在电网外部,由于谐波的存在,将会严重影响系统的稳定,相比于偶次谐波,奇次谐波会对系统造成更大的危害[13]。为了有效地降低奇次谐波,缩短重复控制器开始修正跟踪误差时的延迟时间,笔者将内膜进行改进,内模只选取周期采样次数的1/2。奇次谐波重复控制器是重复控制将一个基本单元放入回路中,该基本单元基于采样周期延迟的正反馈,由N/2 个采样周期延迟的负反馈组成,其中N=Ts/T0(N 为一个周期的采样次数,Ts为系统的采样周期,T0为输出正弦电压基波周期),可以在某个频率及其所有谐波下引入无限增益。改进后的重复控制结构如图9b 所示。
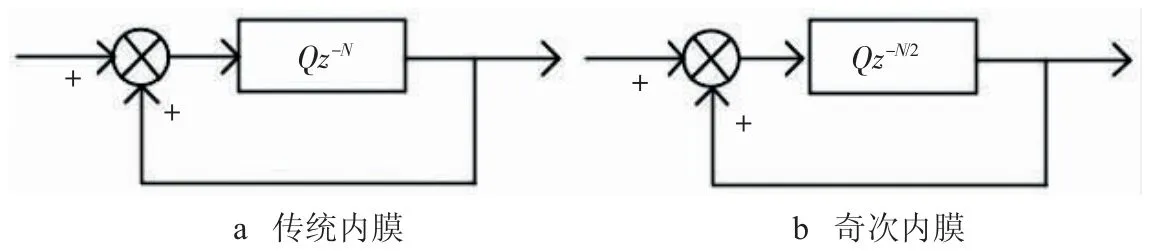
图9 传统和奇次谐波重复单元
PI 控制器中,比例环节可以实现动态响应速度快,积分环节可以实现无静差跟踪,但PI 控制很容易出现周期性干扰,没有很好的抑制作用;重复控制由于内部存在延时环节,动态性能较差,但在周期信号控制中具有良好的稳态性能[14]。本文将二者结合在一起,并考虑到降低奇次谐波,采用基于奇次内膜级联式复合重复控制结构,如图10 所示。重复控制器与反馈级联闭环,第1 个周期内通过闭环进行调节,从第2 个周期开始,重复控制再进行无静差跟踪,以提高系统的动态响应。

图10 基于奇次谐波级联式复合重复控制框图
图10 中,z-N/2为超前环节;内膜包括低通滤波器和延迟环节Q(z)z-N/2;C(z)为补偿器,提供相位补偿和幅值补偿;Gc(z)为PI 控制器;Gp(z)为被控对象;r(z)为参考电流;d(z)为扰动;y(z)为输出电压;E(z)为跟踪误差。
对重复控制器的设计即对三个环节参数低通滤波器Q(z)、采样次数N 和补偿环节C(z)=krzMS(z)的设计。为了简化设计过程,通常设Q(z)=0.95、kr=0.9,则N=10 000/50,即只用对滤波器补偿S(z)补偿和zM超前环节进行设计即可。
三相LCL 并网逆变器的系统传递函数为式(11),在重复控制器加入之前已经插入PI 控制器,经过前面计算,比例函数kp=0.06,ki=0.004 4。
将三相LCL 并网逆变器通过双线性变换法离散化后,得到
S(z)一般设计为低通滤波器,二阶滤波器起的主要是对高频信号的衰减作用,二阶滤波器仅提供高频衰减,因此可以根据二阶滤波器的截止频率来设计,补偿器C(z)中的滤波器S(z)一般采用的是二阶低通滤波器的形式,如式(17)所示,取低通滤波器的截止频率为受控对象的谐振频率ω=31 400 rad/s,阻尼系数0.707,通过双线性比变换法离散后,最后设计的补偿器C(z)中的滤波器S(z)为:
从图11 中可看出高频段增益得到了有效抑制。因为滤波器和逆变器本身都存在滞后,它则由超前环节zM来补偿,首先画出S(z)GLCL1(z)的Bode 图,再依次画z-M的Bode 图;通过伯德图比较分析模块z-M 与补偿对象之间的相位滞后特性来完成M 参数的选择,以达到最佳的相位补偿效果。图12 为不同阶数的超前补偿效果图。
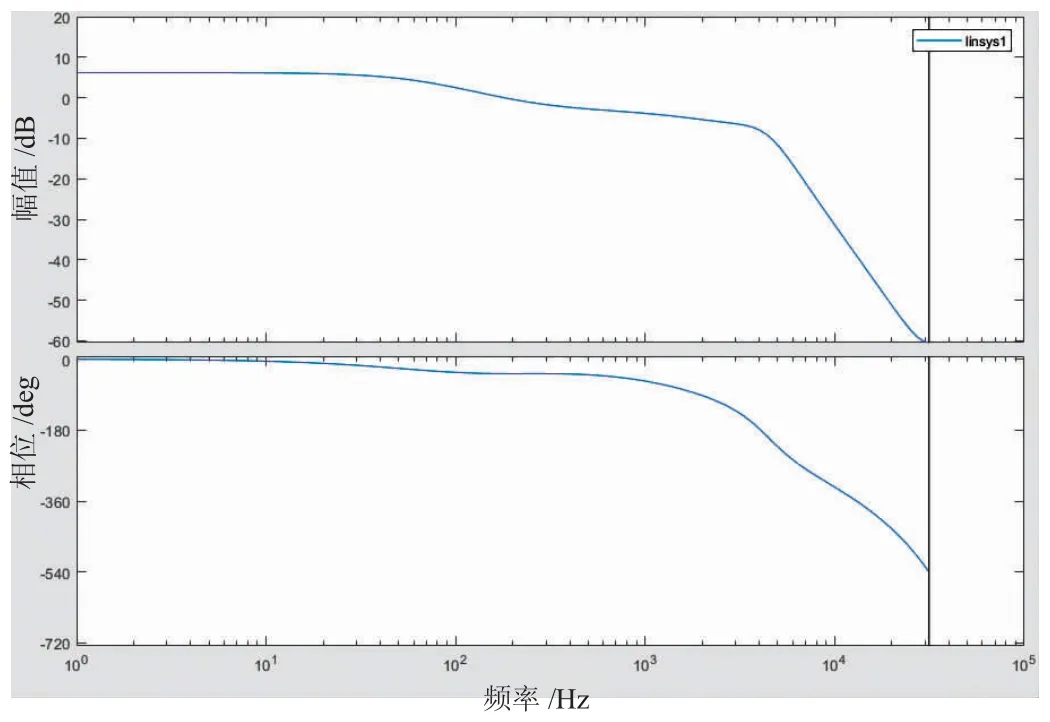
图11 S(z)GLCL1(z)的伯德图
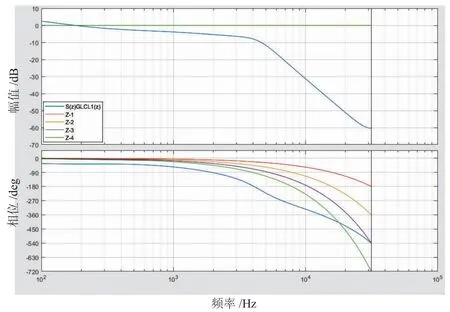
图12 超前环节z-M 的相频特性
z-2的相频特性曲线在中低频段与被控对象的相频特性曲线基本一致。可以认为提前2 拍的超前补偿环节z2可以有效补偿和纠正系统的相位滞后问题,并保证系统中低频零相移的控制特性。
4 频率自适应级联式重复PI 控制
传统重复控制的离散域内膜G(z)=1/(1-Q*z-N/2),其中N=fs/f0(fs为采样频率,f0为电网频率)。在理想情况下,采样频率和电网频率的比值N 为整数,此时重复控制能够有效抑制各次谐波,但由于弱电网存在,电网频率会出现一定程度的波动,N 中会出现小数部分,即
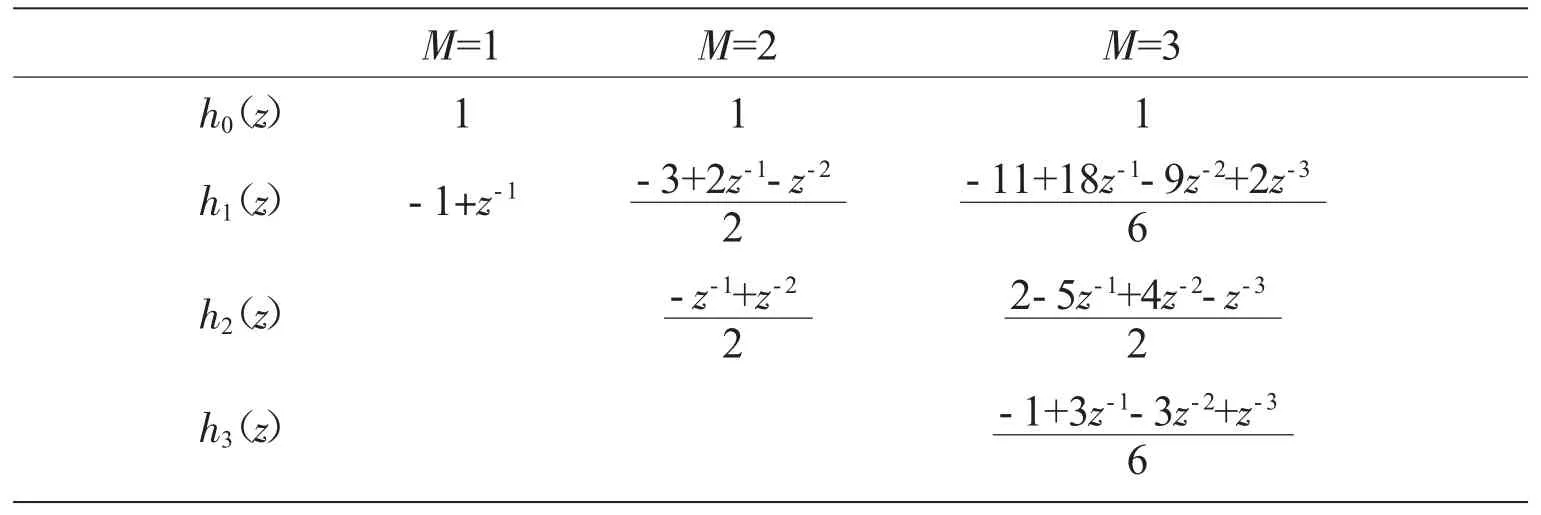
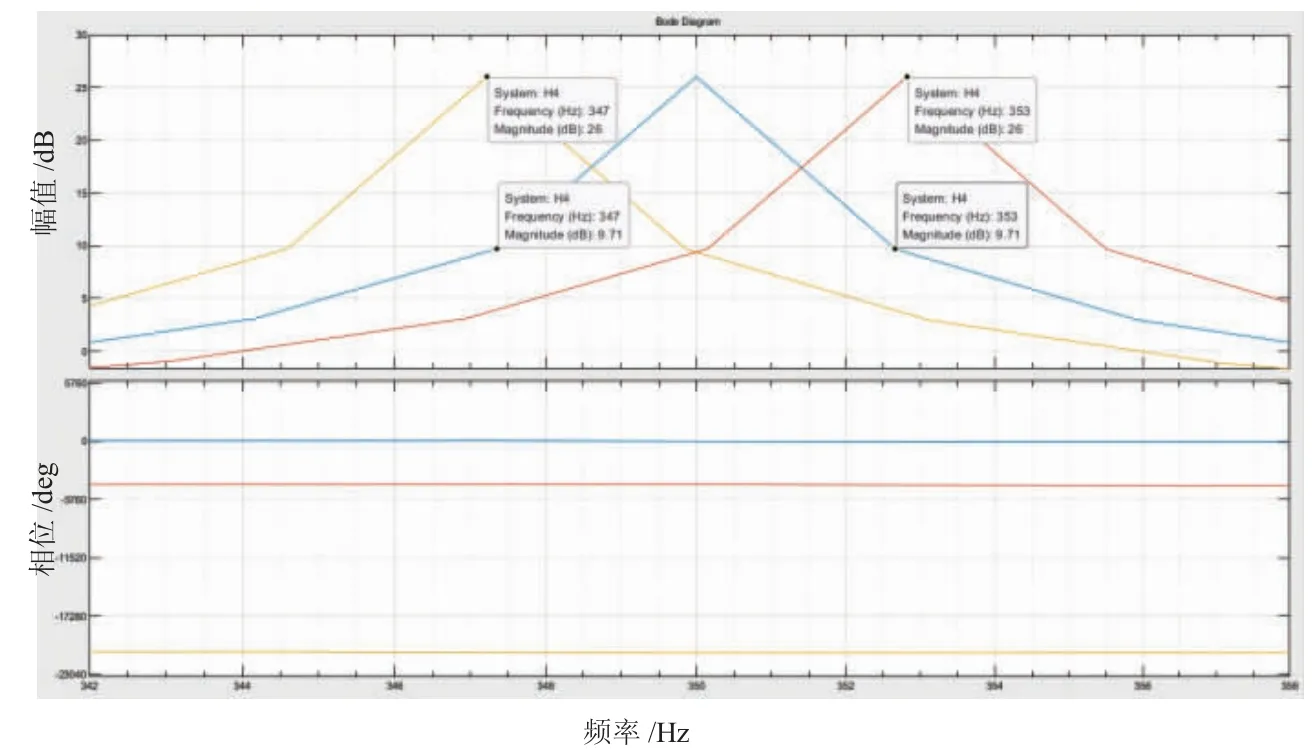
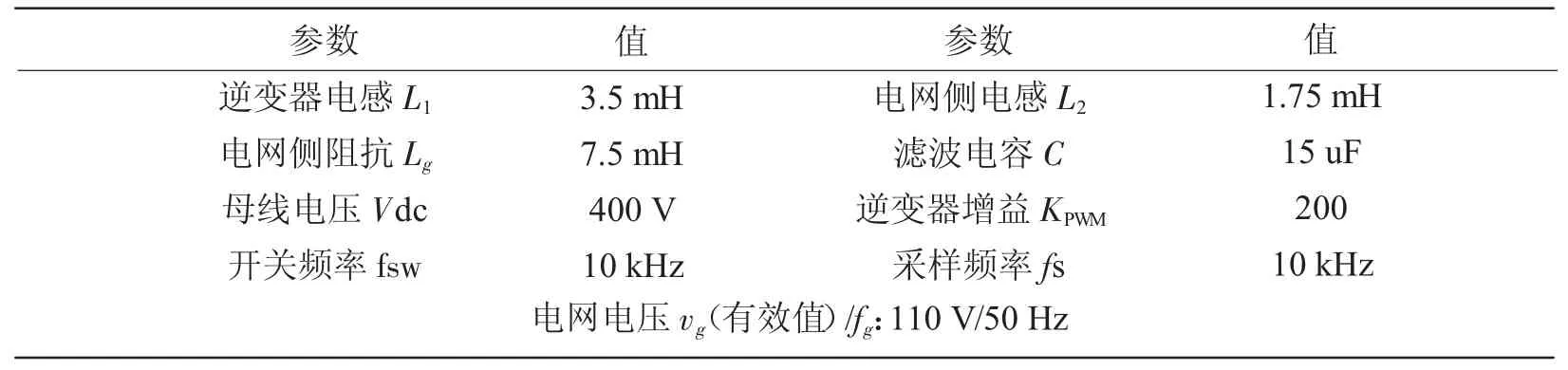
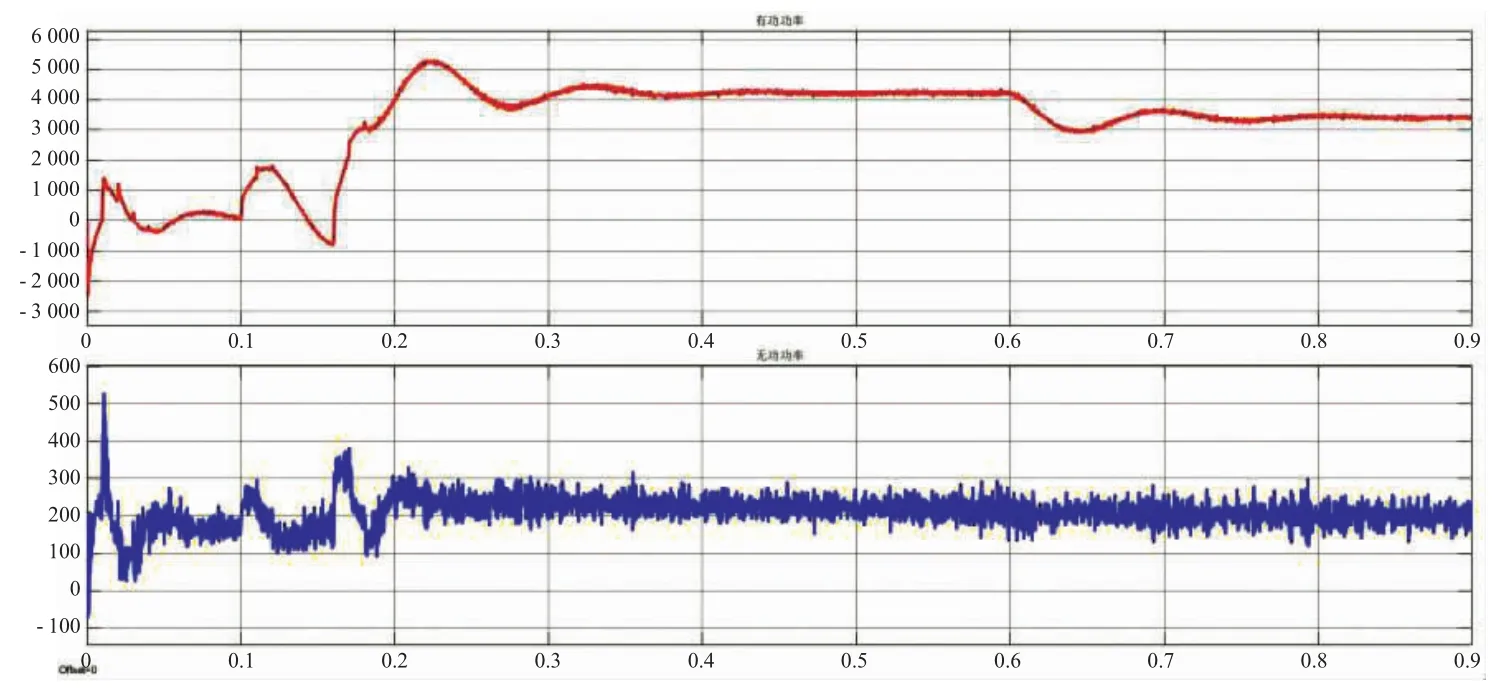
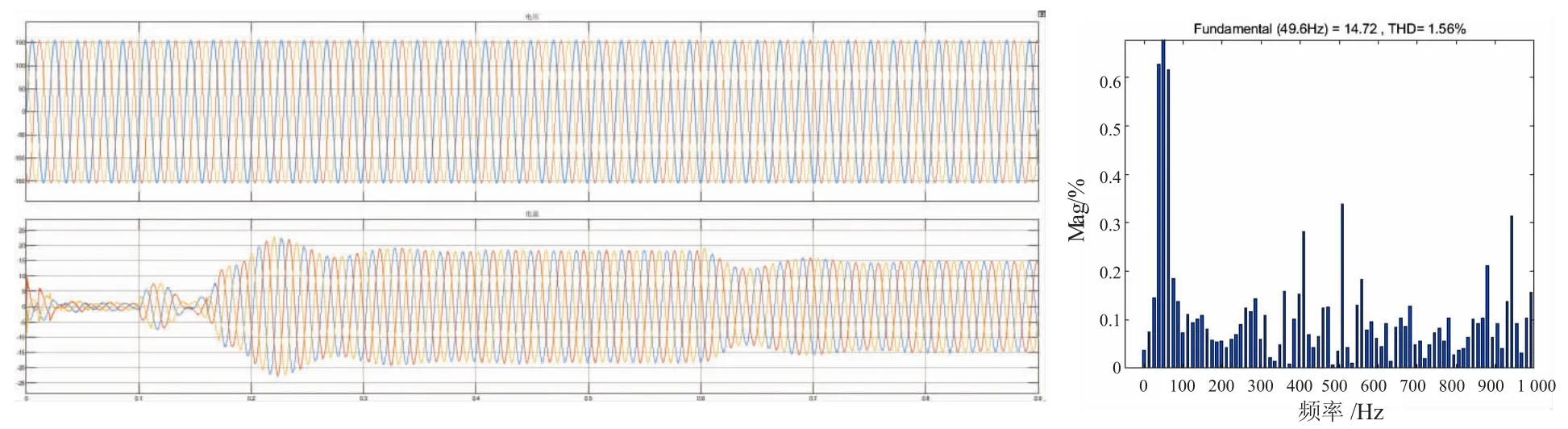
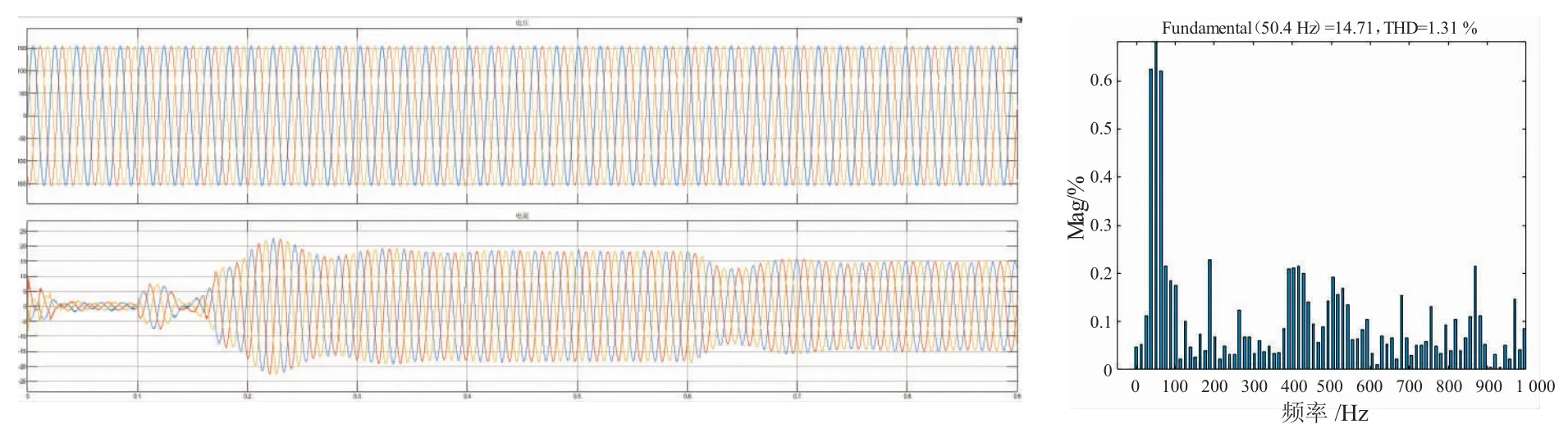
其中,Ni=int(N)表示整数部分,F=N-Ni表示小数(0 由拉格朗日插值原理可得 由式(25)可以得出基于幂级数展开的分数延迟滤波器,如图13 所示。 图13 M 阶分数延迟滤波器 当F=d,d 为整数时,式(25)依然成立,即 用矩阵形式表示为 其中 利用拉格朗日插值法计算得到 当M 分别取1、2、3 时,滤波器的系数如表1 所示。 表1 分数延迟滤波器的系数 本文选取M=3 作为实际的插值阶数。 在实际生活中,电网频率需要在49.6 Hz~50.4 Hz 之间波动,以7 次谐波为例,当电网频率为49.6 Hz 和50.4 Hz 时,传统内膜(N=200)和加入分数延迟环节内膜(N=10 000/49.6=201.6 和10 000/50.4=198.4)的幅值特性对比如图14 所示。频率波动时加入分数延迟环节的RC 在7 次谐波处的增益由9.71 dB 增加到26 dB,谐波抑制效果更好。 图14 7 次谐波处的幅频特性 对应的控制框图如图15 所示。 图15 频率自适应级联式重复PI 控制框图 考虑到电流纹波限制、无功功率要求和电网谐波标准,表2 列出了主要的电路参数。 表2 电路主要参数 对变化的光照模式下COOT 优化算法的追踪能力进行仿真,设定在时间t=0 s 时,光伏组件受光照强度的情况1 为:1 000、900、600、800、400 W/m2,最大功率为Pmax=4 250 W;在t=0.6 s 时所受光照情况2为:600、500、200、400、200 W/m2,最大功率为Pmax=3 430 W;变化遮挡下的输出有功功率、无功功率曲线如图16 所示。 图16 变化光照下有功、无功功率曲线 光照情况1 时,基于COOT 算法的MPPT 系统在0.42 s 后追踪到全局GMPP,为4 250 W;t=0.6 s时,光照情况2 变化,COOT 算法重启,并在0.82 s 时准确追踪到新的全局GMPP,为3 430 W。可知基于COOT 方法的MPPT 系统在变化的光照模式下可以快速准确跟踪到全局最大功率点处。 将频率由原来的工频50 Hz 变为49.6 Hz,采用幂级数展开的分数延迟滤波器下基于奇次内膜级联式复合重复控制并网策略(即频率自适应级联式重复PI 控制并网策略),系统输出电压-电流波形和电流谐波分析图如图17 所示。 图17 49.6 Hz 下改进型重复PI 控制电压-电流波形和并网电流谐波含量 将频率由原来的工频50 Hz 变为50.4 Hz,采用幂级数展开的分数延迟滤波器下基于奇次内膜级联式复合重复控制并网策略(即频率自适应级联式重复PI 控制并网策略),系统输出电压-电流波形和电流谐波分析图如图18 所示。 图18 50.4 Hz 下改进型重复PI 控制电压-电流波形和并网电流谐波含量 由图18 可知,无论是光照强度还是电网频率发生变化时,并网电流与电网电压频率和相位依旧一致;并且工频由50 Hz 变为49.6 Hz,输出电流的THD 仅为1.56%;工频由50 Hz 变为50.4 Hz,输出电流的THD 仅为1.31%;说明无论是光照强度发生变化或者频率发生漂移时,采用频率自适应级联式重复PI 控制可使系统的输出电流对参考电流的跟踪误差小,而且可以明显看出奇次谐波含量也很少。 本文将白冠鸡优化算法结合到MPPT 上面,可以快速准确追踪到全局最优功率值没有陷入到局部最优;本文仅采用逆变器侧电流反馈进行有源阻尼控制,不同于利用伯德图进行分析,提出基于阻尼因子的设计方法,在数学建模过程中把采样计算延时和PI 控制加入,验证得到的数学模型与无源阻尼的数学模型是等效的,最后加入重复控制;在这个基础上,为了减少奇次谐波,提出基于奇次内膜的级联式复合重复控制策略降低奇次谐波的危害;考虑到实际电网频率会出现一定波动,提出幂级数展开的分数延迟滤波器,提高重复内膜对电网频率扰动的适应性;最后把它们运用到三相LCL 型光伏并网系统Simulink 仿真中,通过将光照强度和工频频率进行变化,验证本文提出的基于COOT 优化算法和改进型重复PI 控制策略下,并网电压和电流具有良好的正弦形、电流可以很快跟踪到给定值、THD 值较小且奇次谐波含量低。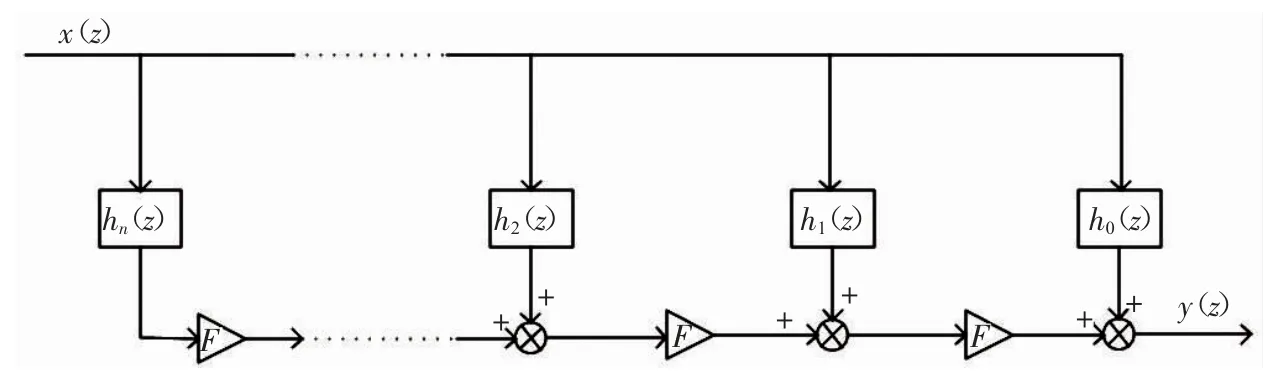

5 仿真验证
6 结语
猜你喜欢
数学物理学报(2021年3期)2021-07-19 06:02:32
数学年刊A辑(中文版)(2021年2期)2021-07-17 08:38:02
数学物理学报(2021年2期)2021-06-09 08:54:38
河南畜牧兽医(2017年8期)2017-11-24 03:21:56
中国广播(2017年9期)2017-09-30 21:05:19
—— 瓮福集团PPA项目成为搅动市场的“鲶鱼”
当代贵州(2017年24期)2017-06-15 17:47:35
中国医院院长(2017年7期)2017-06-15 12:58:06
诗潮(2017年5期)2017-06-01 11:29:51
数学物理学报(2016年6期)2016-04-16 04:41:06
中南财经政法大学学报(2015年5期)2015-04-07 03:43:24