
自主式口腔种植机器人牙列缺损种植修复的临床回顾性研究
2024-02-03 06:40谢瑞白石柱赵铱民
实用口腔医学杂志 2024年1期
谢瑞 白石柱 赵铱民
计算机辅助种植技术给口腔种植领域带来了重大变革[1-2]。目前临床中应用最广泛的是静态导板辅助种植和动态导航辅助种植技术[3-4]。这两种技术通过物理引导或客观参照指导医生完成手术,降低了术中医生手感和外科经验对手术精度的影响[5],目前文献报道中静态导板和动态导航辅助种植术后精度相似[6-7]。
但是这两种辅助种植方式仍然存在一些技术短板。静态导板对术区的遮挡会影响窝洞预备时的冷却效果,对张口度也提出了更高要求[8]。同时在静态导板手术中,医生的使用经验也会对手术时间和精度产生较大影响。在动态导航手术中,医生眼睛观察导航界面,手持种植马达完成种植操作,这种“手眼分离”的操作模式对医生是一个全新挑战,有研究表明,医生往往需要更多的练习才能达到理想的手术效果[9]。所以医生经验仍然是静态导板和动态导航手术精度的重要影响因素之一。
为了进一步减小对种植手术精度的影响,本研究团队从2013 年开始了自主式口腔种植机器人系统的研发工作[10],并于2017 年完成了世界首台自主式口腔种植机器人种植手术[11]。Li等[12]报道使用自主式口腔种植机器人系统进行种植,术后肩部和根部种植偏差约为0.2~0.5 mm。 Jia等[13]通过一项回顾性研究评估了自主式口腔种植机器人系统用于牙列缺损患者种植修复的精度,结果显示,肩部偏差、根方偏差、角度偏差分别为(0.43±0.18) mm、 (0.56±0.18) mm和(1.48°±0.59°)。
虽然自主式口腔种植机器人的部分研究成果已经发表,精准的植入效果也得到了验证,但关于机器人牙列缺损种植修复的随访结果仍然缺少数据支持。本研究旨在评价自主式口腔种植机器人牙列缺损种植精度的同时,回顾性地分析自主式口腔种植机器人种植修复后1 年内的随访情况。
1 资料与方法
1.1 病例资料
纳入2020 年9 月~2020 年10 月于空军军医大学第三附属医院数字化口腔医学中心进行自主式口腔种植机器人手术且随访信息完整的患者,收集患者病例信息。本研究通过了空军军医大学口腔医院伦理委员会的批准(批准号: IRB-REV-20020050)。
纳入标准: (1)年龄≥18且≤70 周岁,性别不限; (2)由自主式口腔种植机器人完成种植手术的下颌后牙牙列缺损患者; (3)剩余牙槽嵴高度及宽度充足; (4)无影响种植体植入和远期成功率的软硬组织缺损或病变; (5)随访记录完整。
排除标准:全身系统性疾病未得到有效控制;有头颈部放疗史;尚未控制的牙周病或口腔卫生极差者;吸烟数量大于10 支/d者;无法配合后期随访。
1.2 软件设计
患者入组后,拍摄CBCT(HiRes3D,北京朗视),进行口内扫描(3Shape TRIOS 2, 3Shape,丹麦),扫描范围为全牙列。将获取数据导入至机器人种植术前软件(DentalNavi,北京雅客智慧),参照牙齿形态特征,将口内扫描模型配准至CBCT重建的颌骨三维模型中;在软件内置数据库中选择形态适合的牙冠,调整牙冠位置、邻接和咬合;在种植体库中根据骨量选择相应种植体(AstraTech TX, Dentsply Sirona,瑞典),根据牙冠穿出位置和骨量调整种植体的位置和方向;根据厂家提供的标准预备策略规划机器人种植的下钻次序,同时调整种植手机的姿态,避免种植手机柄部同邻牙发生碰撞;设计加工自主式口腔种植机器人手术配件,包括开口装置、视觉标记携带器、吸唾装置及注册孔等(图1)。

图1 自主式口腔种植机器人手术术前软件设计
1.3 手术和修复流程
患者术前常规口内外消毒、铺巾。手术均采用局麻下不翻瓣的方式。完成机器人末端和患者颌骨的空间注册后,按照术前规划的用钻顺序,由自主式口腔种植机器人逐级预备种植窝洞,随后自主植入对应种植体。安装愈合基台后拍摄CBCT。
手术后3 个月,患者复诊,检查种植体骨结合情况,并拍摄根尖片,进行永久修复(图2)。

图2 手术和修复流程
1.4 效果评价
手术后患者拍摄CBCT,用于种植体植入精度的评价。所有患者均参与了修复后即刻(基线)以及修复后6 个月、修复后12 个月的检查随访。检查内容包括种植体周围软组织情况和X线检查。
1.4.1 精度评价 将术后CBCT图像导入软件中(Mimics version 21, Materialise, 比利时),对种植体实际位置的颌骨进行分割。在逆向工程软件中(Geomagic Studio, Geomagic Inc, 美国)配准术前CBCT重建颌骨与术后CBCT实际的颌骨。在3-matic软件中(3-matic, Materialise, Belgium)测量计划与实际植入位置的差异(图3A)。

图3 种植体偏差测量(A)和近远中边缘骨高度测量(B)
1.4.2 边缘骨高度 在基线、修复后6 个月、修复后12 个月采用平行投照技术拍摄种植体根尖片。拍摄由同一名经验丰富的技师完成,图像校准参照物为种植体长度和螺距。规定种植体近远中向的冠方平台为基准面,与种植体近远中接触的牙槽骨顶点向冠方平台做垂线,近远中垂线的平均值就是种植体的边缘骨高度。所有的数据测量由2名医师完成,若两者测量结果相差<0.5 mm,则取均值,若差异>0.5 mm,则重新测量(图3B)。
1.4.3 种植体周围软组织情况 种植体周围软组织评估指标包括探诊深度、探诊出血和改良菌斑指数。 探查工具为牙周探针(UNC Probe, Hu-Friedy, 美国)。 探诊深度在基线和每次随访时记录,探诊出血和改良菌斑指数在每次随访时记录。
1.5 统计学分析
采用 SPSS 19.0 软件对数据进行统计学分析,种植体植入偏差、边缘骨高度、种植体周围软组织情况使用平均值和标准差进行描述。使用线性回归模型分析不同种植体直径和长度对精度的影响。基线、修复后6 个月和修复后12 个月的边缘骨高度采用重复测量方差分析。P<0.05 为差异有显著性。
2 结 果
2.1 病例资料
本研究共纳入20 名患者,共计20 颗种植体。详细病例资料统计如表1所示。
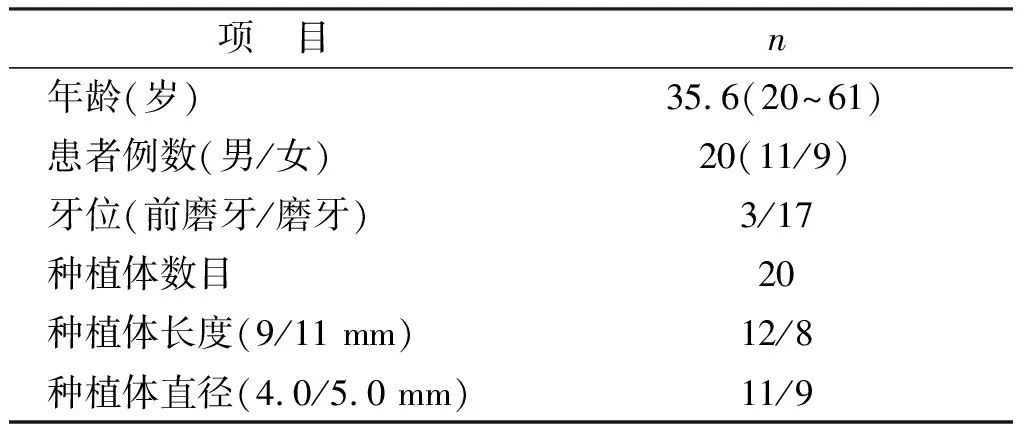
表1 患者临床资料
2.2 术后精度评价
20 颗种植体植入精度的肩部偏差、根部偏差以及角度偏差分别是(0.34±0.11) mm、 (0.34±0.15) mm, (0.82°±0.38°)(表2)。线性混合模型显示,不同种植体直径和长度且对精度的影响无统计学意义(P>0.05)(图4)。
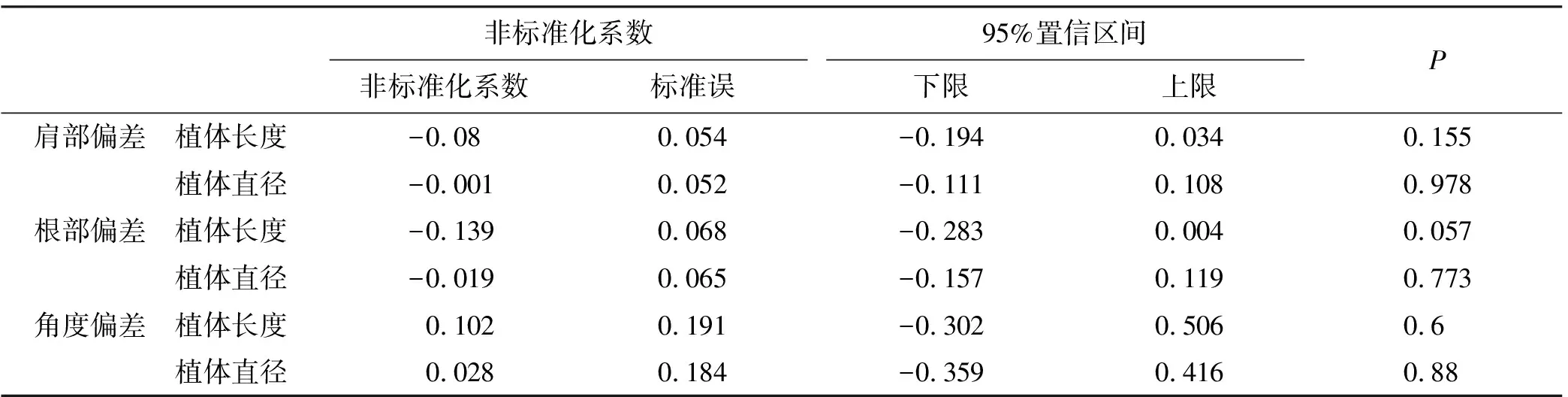
表2 植入精度评价

图4 偏差中位数、四分位数和范围值,包括种植体直径和种植体长度的植入精度箱状图
2.3 种植体存留率
所有病例均完成永久修复。 1 年内随访期间,患者无明显不适症状,骨结合良好,牙冠无损坏脱落,种植体稳定。影像学显示,种植体周围无明显低密度影,种植体1 年存留率为100%。
2.4 边缘骨高度
20 颗种植体周围边缘骨高度稳定,均获得良好骨结合(图5)。在基线、 6 月和12 月的随访中边缘骨高度分别为(1.30±0.50) mm、 (1.27±0.44) mm、(1.21±0.38) mm。重复测量方差分析显示边缘骨高度差异无统计学意义(P<0.0.5)(表3)。

表3 边缘骨高度

图5 不同随访时间节点根尖片
2.5 种植体周围软组织情况
所有患者均接受了详细且一致的口腔卫生宣教。随访期间患者口腔卫生状况良好, 探针深度变化无统计学意义(P<0.0.5),种植体周围软组织详细结果见表4。

表4 种植体周围软组织情况
3 讨 论
计算机辅助种植技术的出现降低了医生操作经验对手术精度的影响,从而确保种植体精准植入到符合力学和生物学要求的最佳位置[14-15]。根据文献报道,静态导板和动态导航种植肩部偏差分别为(1.40±0.72) mm和(1.73±0.43) mm,根部偏差分别为(1.66±0.61) mm和(1.86±0.82) mm,角度偏差分别为(4.98°±2.16°)和(5.75°±2.09°)。针对这两种辅助种植技术的精度分析表明人为因素仍然是手术偏差的主要来源之一[8-9]。
随着外科机器人技术的应用和发展,机器人精准、稳定、高效的特点已经被越来越多的医生所认可。主从式种植机器人系统Yomi(Neocis, USA)的应用进一步提升了辅助种植的精度,Mozer等[16]完成的病例表明,主从式种植机器人系统的肩部偏差约为0.79 mm,根部偏差为0.87 mm,角度偏差为1°。这种主从式机器人系统综合了静态导板的物理约束优势和动态导航的灵活性和可视性,实现了植入精度的提升,但手术的操作仍然由医生操控机械臂完成,不可避免的是,操作机器人的经验还是会对植入精度产生影响。如何进一步减小人为因素对手术结果的影响,自主化、智能化的外科机器人技术为本团队指明了发展方向[17-18]。自主式口腔种植机器人系统综合应用视觉传感、力传感、三维可视化和微型模块化机器人等技术,实现了机器人自主定位、自主进出口腔、自主预备植窝洞、自主植入种植体等操作,最大程度降低了医生外科经验不足所造成的植入偏差。
在本研究中,种植体的植入的肩部偏差、根部偏差以及角度偏差分别是(0.34±0.11) mm, (0.34±0.15) mm, (0.82°±0.38°),相比于其他辅助种植技术,自主式口腔种植机器人体现出了的精度优势。线性回归模型说明不同的种植体直径或长度对手术精度的影响并没有差异,说明了自主式口腔种植机器人手术具有一定的稳定性,特别对种植体植入方向的控制。
在1年的随访中,所有种植位点边缘骨高度并没有发生显著的变化,这个结果得益于以修复为导向的种植体术前规划[19]和机器人技术的精准实现。所有病例的远期随访工作仍在继续。同时,更加微创、精准的机器人手术也更利于剩余软硬组织的保留和软组织的塑性,对种植体周围软组织的健康产生积极的影响。
本研究病例数量有限,下一步应扩大病例数,区分不同的机器人手术术式,从植入精度出发分析自主式口腔种植机器人的临床应用效果,优化自主式口腔种植机器人的应用流程。
4 结 论
本研究中自主式口腔种植机器人在牙列缺损种植修复中的应用取得了良好的疗效,植入精度高, 1 年内随访结果显示边缘骨高度无显著变化。后期应继续开展随访工作,以评价自主式口腔种植机器人的远期疗效。
猜你喜欢
口腔医学(2021年10期)2021-12-02
冶金设备(2021年1期)2021-06-09
学生天地(2020年6期)2020-08-25
数学年刊A辑(中文版)(2020年2期)2020-07-25
海南医学(2016年8期)2016-06-08
系统医学(2016年8期)2016-02-20
中国卫生标准管理(2015年25期)2016-01-14
医学研究杂志(2015年12期)2015-06-10
现代冶金(2015年4期)2015-02-06
山东冶金(2014年4期)2014-02-09
