干扰攻击下基于随机通信的多智能体系统一致性分析
2024-01-26 03:18吴小太余金其张振华
指挥与控制学报 2023年6期
吴小太 余金其 唐 漾 张振华
随着未来战争向信息化与网络化对抗方向迅猛发展,以多智能体系统协同控制为代表的群体智能技术正在向军事领域全面渗透[1],并在无人机蜂群战术[2]、多导弹协同作战[3]、协同侦察系统等方面得到广泛应用.集群系统通过网络和通信技术来实现智能体与其邻居节点之间的信息传递与协同工作[4-5],进而完成复杂的军事任务.
在网络技术应用于集群智能的同时,系统的指挥与控制模块及信息传输途径还面临着来自外界的恶意攻击风险[6].当系统遭受网络攻击时,合法操作员可能无法指挥与控制目标系统,导致控制命令传输失败,使得多智能体系统的一致性无法得到保证、集群战术目标无法完成.因而,确保被控系统的网络通信安全已经成为一项重要挑战.网络控制系统可能会受到不同类型的网络攻击威胁[10-12],主要包括拒绝服务(denial of service,DoS)攻击[7]、欺骗攻击[8]、干扰攻击[9]等.文献[10] 研究了一类对抗性攻击下网络物理系统的安全评估与控制问题,且控制信号在被发送到执行器的过程中可被攻击者恶意篡改.文献[11]指出,攻击者可以在不被系统监测到的情况下,将特定的虚假数据注入系统.由文献[12]可知,自身能量有限的攻击者还可以利用DoS 攻击来阻断通信网络的信息传输.因此,研究网络攻击背景下多智能体系统的协同控制,特别是一致性问题具有重要意义.
在假设网络攻击服从伯努利(Bernolli)分布[13-14]或马尔可夫链(Markov Chain)[15]等随机分布的基础上,针对随机网络攻击下多智能体系统一致性问题的研究已经取得丰硕成果.文献[13]主要研究了DoS攻击导致的网络丢包现象对系统控制性能的影响,设计了最大化平均期望估计误差的最优攻击调度方案,以及最大化丢包网络上的期望终端估计误差的最优攻击调度方案.文献[14]设计了一类智能攻击者,通过随机向网络中的某些通信信道注入DoS 攻击使得相应的被攻击通信链路断开,最终破坏目标系统的一致性状态.文献[15]则考虑了马尔可夫调制DoS攻击下的风险敏感随机控制问题,其中,攻击者使用隐马尔可夫模型随机阻塞系统中的控制数据包.上述文献通常从攻击者角度研究如何设计攻击手段,以提高其攻击效率,而从被攻击者角度研究系统在被攻击时如何正常运行的文献则相对较少.当系统面临可能的外部攻击时,设计一种有效且易于实现的控制机制,使得被攻击系统仍能维持正常工作具有重要价值.文献[16]提出一类与触发机制相结合的随机通信协议,以降低干扰攻击对多智能体系统一致性的不利影响.基于通过智能体之间随机通信或采样来生成3 种控制信号的三元控制方法[17],分别研究了攻击者干扰攻击发生和持续时间与随机通信时间无关和相关两种情形下的多智能体系统的一致性问题.所提出的随机通信协议可以在概率意义上确保系统在有限时间内实现有界一致性.然而,文献[16]仅假定随机通信序列服从均匀分布,这可能导致相邻通信间隔过于接近甚至重合的不合理现象,从而限制了相关研究结果的实际应用范围.
本文将考虑干扰攻击下一类基于随机通信协议的多智能体系统一致性问题.通过三元控制方法和随机分析技巧,获得了干扰攻击下基于随机通信的多智能体系统实现一致性需满足的充分条件.不同于文献[16],假定智能体间的通信发生时间具有随机性,即通信时间间隔由确定性的准备时间与随机时间间隔共同组成,从而进一步降低信息在通信过程中被恶意攻击的风险.值得指出的是,本文引入的确定性与随机时间共同组成的混合时间间隔,可以有效避免文献[16]中通信发生时间间隔过小,甚至重合的不足,有效拓广了文献[16]中相关结论的适用范围.相比于文献[17-18]等采用的确定性通信策略,本文设置的通信机制使得采样时刻具有随机性,可在一定程度上避免攻击者对被控系统具体采样规律的侦测和预判.相比于受控系统的状态轨迹在时间无穷大尺度上的渐近或指数收敛[19],本文基于三元控制方法可以确保多智能体系统在有限时间内实现一致性.
1 预备知识
1.1 图论知识
所涉及的图论相关概念.用有向图G=(V,E,C)表示多智能体系统的通信拓扑,其中,V={1,…,n}表示拓扑图的节点集,E⊂V×V 是图中节点之间的通信链路构成的边集,C=是一个具有非负元素的加权邻接矩阵.有向连接边Eij表示从i 节点到j 节点的信息传输途径,当且仅当Eij∈E时>0.否则,=0.Ni表示节点i 的邻居节点的集合,di是节点i 的度.表示图G对应的拉普拉斯(Laplace)矩阵,其中,,,.
1.2 干扰攻击描述
考虑在特定时间区间内,智能体之间的通信信道被攻击者的干扰攻击所阻断的实际情形.类似于文献[16],假定当干扰攻击发生时,所有通信链路上的通信都将失效,即智能体在攻击持续期间无法获取邻居节点的状态信息.针对智能体用于通信的共享网络建立如下攻击模型:
令Ak表示第k 次攻击的持续时间区间,在此期间智能体之间的信息交互被中断.对于任意时间区间,A()表示受到干扰攻击的时间区间集合,为:
假设2 存在正常数κ和ρ∈(0,1),对于任意t≥≥0,有
1.3 系统建模及三元控制
考虑多智能体系统的动力学方程如下:
注1 针对多智能体系统一致性问题的研究有两类控制器比较常见,一是经典的连续性控制器,二是仅在离散时刻更新控制信号的控制器.本文采用三元控制方法的动机如下: 一方面和第一类控制器相比,三元控制器只需测量随机时刻处智能体邻居节点的状态信息,从而避免连续通信带来的高成本、高通信风险等不利因素的影响;另一方面,本文在基础上进一步引入了符号函数并使得,进而保证与符号一致,这是后续证明受控系统能够实现有界一致性的关键.
1.4 随机通信协议
本节提出一类混合式通信时间间隔模型,即相邻通信间隔包含确定性的准备时间和随机通信时间,研究混合通信模式下多智能体系统(5)的一致性问题.其中,确定性的准备时间也被称为准备期,随机通信时间则是指智能体间的通信发生时刻在该时间区间内随机出现.
定义2 对于∀i∈V,令正常数△i为周期时间,Ti*为准备期的持续时间,则智能体i 的准备期和随机通信区间可分别表示为[k△i,k△i+Ti*]与[k△i+Ti*,(k+1)△i],而通信发生时刻是随机通信区间上均匀分布且彼此之间相互独立的随机变量序列.
注2 文献[16]中相邻的通信发生时刻时间间隔可能非常小,甚至重合,从而发生频繁启停的情况导致控制机制无法实际应用.针对该情况,本文提出如图1 所示的混合式通信时间间隔模型.引入确定性的准备时间,每个智能体i 尝试在每个△i周期内向它的邻居节点通信一次,即在[k△i+Ti*,(k+1)△i] 中随机发生一次.智能体在准备期中进行短暂的积蓄,避免发生频繁启停的情况.期间,智能体i 不进行信息传输.假定攻击者可以预知智能体处在准备期进行自我维护,因此,不在准备期发动攻击,以保留能量进行下一次攻击.
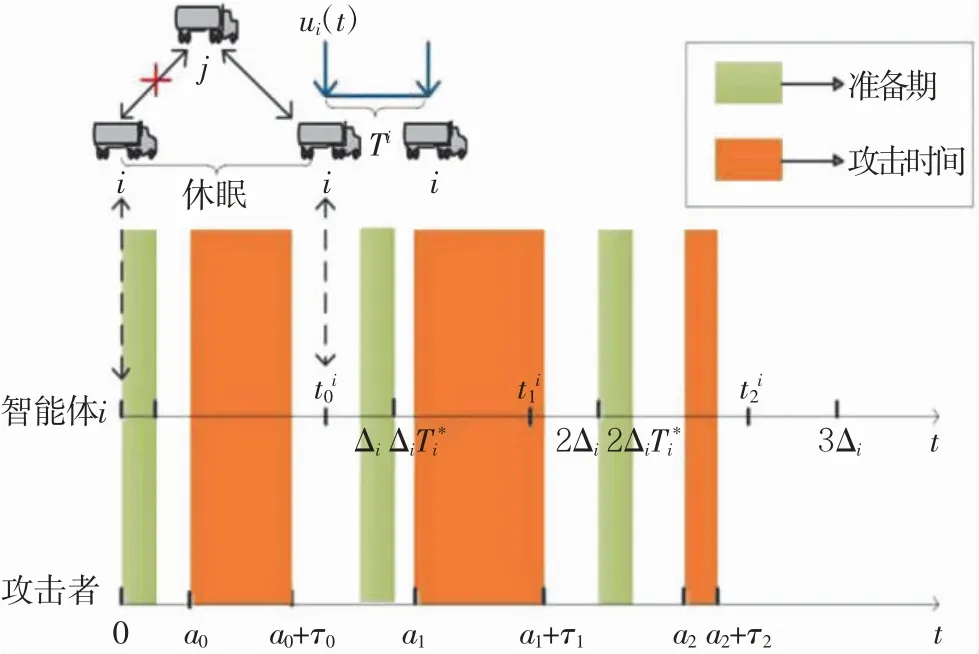
图1 智能体i 的随机通信时刻Fig.1 Random communication time of agent i
2 一致性分析
基于上述随机通信协议及控制输入(11),对干扰攻击下多智能体系统(5)的一致性进行分析.
引理2 若假设1 与2 成立,则对任意的i∈V,存在正常数M 使得
即各智能体可以在概率意义下进行无限次成功的通信尝试.
证明: 在定义2 与假设1 条件下,攻击者为保留能量在智能体i 的准备期内不发起攻击,在随机通信时间段内发动开始时间和持续时间均是定值的干扰攻击,且攻击不依赖于智能体的随机通信时刻.令
因此,每个智能体i 可以在概率意义下完成无限次的成功通信.
则多智能体系统(5)满足有界一致性.
式(27)成立.进一步,
注3 定理1 针对一类混合式通信时间间隔模型,研究了干扰攻击背景下基于随机通信协议的多智能体系统一致性.值得指出的是在文献[13]中的通信协议需要附加假设条件,ρ+σ△*<1,△*为每个智能体连续通信尝试时间的最小间隔.当上述条件不满足时,本文提出的随机通信协议仍然能确保多智能体系统达成一致性.
3 数值仿真
在文献[20]中提出的无人系统网络安全背景下,通过数值仿真验证上述结果的可行性.
实际应用中,无人车集群通信链路主要包括遥控信号、信号传输和Wi-Fi 通信等模块.鉴于无人车及其通信模块的特性,当攻击者截获通信信息或者劫持无人车本身时,会给使用者和周围环境带来严重的后果.考虑如图2 所示的实际场景,具体描述如下: 我方合法操作员在地面控制站通过通信链路向无人车集群发送侦察任务;由于通信链路的开放性,当集群进入敌方干扰设备感知范围时,攻击者以技术手段窃取集群的通信数据;并发动干扰攻击阻断无人车之间的通信信道,从而造成无人车集群的失控瘫痪.
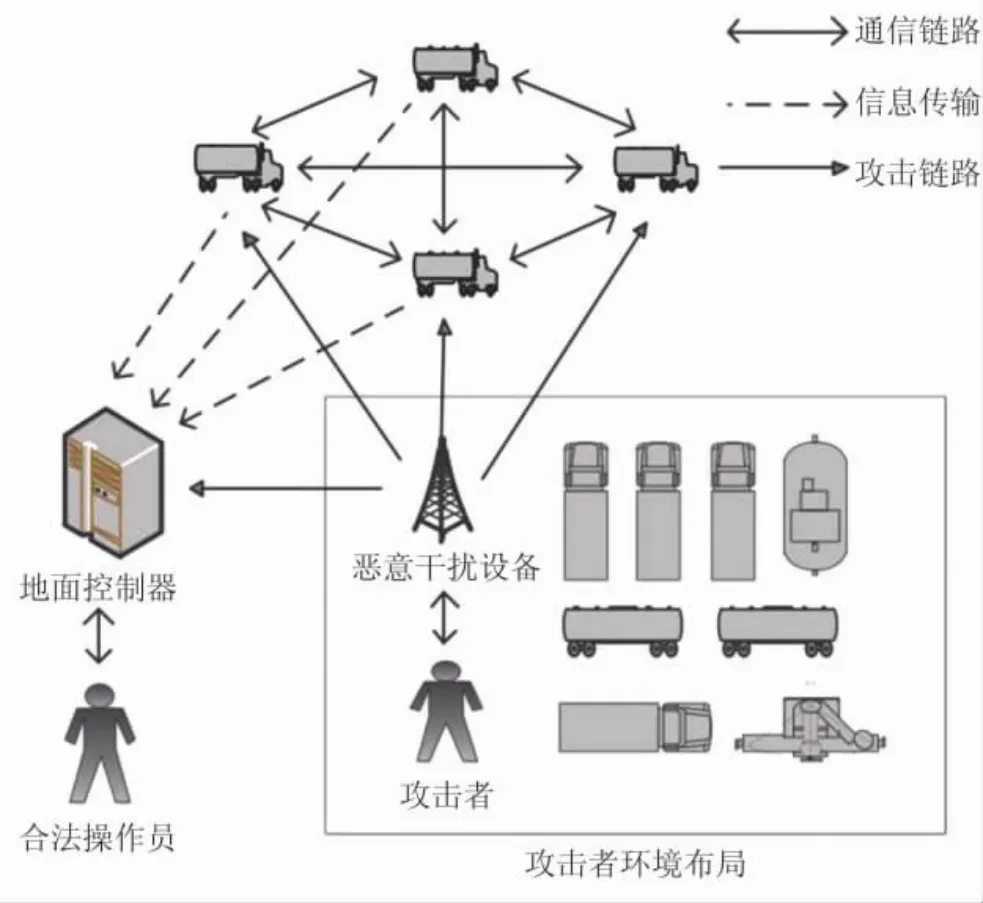
图2 针对通信链路的网络攻击Fig.2 Network attack against communication link
基于上述应用场景,为方便起见,仅考虑由4 辆无人车构成的多智能体系统,且系统拓扑图(如图3所示)对应的Laplace 矩阵为:
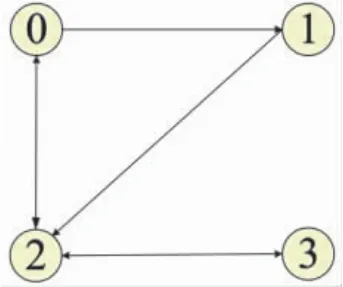
图3 多智能体系统的网络拓扑图.Fig.3 Network topology of multi-agent system
各无人车分别赋予固定的周期值△0=0.2,△1=0.25,△2=0.2,△3=0.25.令各周期内无人车的准备或维护期分别取值为T0*=0.05,T1*=0.06,T2*=0.05,T3*=0.06.假设各无人车的初始状态分别为x0(0)=0.2,x1(0)=0.1,x2(0)=-0.3,x3(0)=0.6,无人车i 的随机通信时刻序列和干扰攻击时刻序列如图1 所示.通过数值模拟,可以得到如图4 所示的智能体在干扰攻击下的状态轨迹示意图.
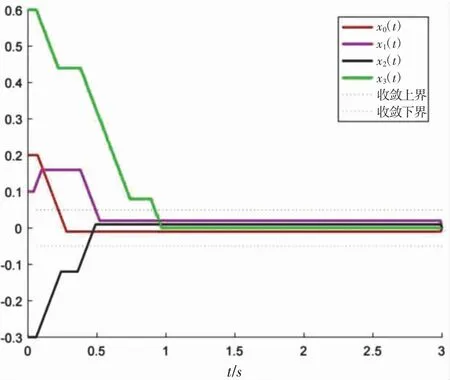
图4 无人车系统在干扰攻击下的状态轨迹Fig.4 State trajectory of unmanned vehicle system under jamming attack
由图4 可以看出,即使在干扰攻击的背景下,基于随机通信协议的多智能体系统的状态轨迹仍然呈现出明显的收敛趋势,且随着时间的推移,系统状态最终稳定在一个已知的且取值较小的上下界内部.在三元控制协议的作用下,受控多智能体系统最终在有限时间内实现了有界一致性.此时,可以近似认为所有无人车能够表现出相同的动力学行为,即一致性状态下的无人车编队的整体队形保持不变.因此,本文所得研究结果的可行性得到了有效验证.
4 结论
采用三元控制方法研究了干扰攻击背景下多智能体系统的一致性问题.为降低控制过程中信息传输被干扰攻击的频率和次数,提出了一种随机通信协议,并设计相应的混合式通信时间间隔模型,即智能体在特定时间段内获取邻居节点状态信息的时刻是随机的.通过李雅普诺夫函数方法以及随机分析技巧给出了相关的一致性准则,并通过实例仿真验证了所得结果及所用方法的有效性.
猜你喜欢
自动化学报(2021年8期)2021-09-28
数学小灵通(1-2年级)(2020年11期)2020-12-28
小学生学习指导(低年级)(2019年3期)2019-04-22
爱你(2018年16期)2018-06-21
成都信息工程大学学报(2017年5期)2018-01-23
广东石油化工学院学报(2016年6期)2016-05-17
电测与仪表(2016年2期)2016-04-12
指挥与控制学报(2015年4期)2015-11-01
读写算·小学低年级(2014年4期)2014-07-24
铁路通信信号工程技术(2014年1期)2014-02-28