面向合谋攻击的多智能体系统弹性一致性控制
2024-01-26 03:18:22温广辉
指挥与控制学报 2023年6期
赵 丹 温广辉
随着万物互联时代的到来,以无中心、分权化为特点的多智能体分布式协同控制展现出强大的群体智能特性,因而成为现代工程系统的重要构成方式[1].现代工程系统的规模逐渐扩大,运行环境极其复杂,面临着高动态、不确定性、恶劣环境、强电磁干扰等各种威胁.2019 年6 月,伊朗击落美军全球鹰无人机事件表明,利用电磁干扰可以造成无人机的通信中断、控制失灵,甚至被击落[2].因此,研究多智能体系统安全协同控制问题,快速准确隔离攻击的影响,提出弹性控制方案,提高多智能体系统在复杂环境中的生存能力和鲁棒性,对多智能体系统在社会生产生活中的深入应用具有重要意义[3-4].
攻击检测与隔离可以实现攻击的预警与定位,是管控多智能体系统安全风险的重要环节.利用观测器对系统状态进行估计,并与实际系统的运行情况进行对比,得到比较残差,当其超过一定阈值时,则可预警攻击的发生.卡尔曼滤波器、龙伯格观测器、未知输入观测器、滑模观测器、神经网络观测器等已经在多智能体系统的攻击检测中得到深入应用[5-9].考虑到系统运行过程中,仅测量输出信息可以被获取,因而提出了基于相对输出测量的观测器设计方法[10].当多智能体系统中有多个个体遭受攻击时,则需要在攻击检测的基础上进行攻击隔离与识别,进一步找出具体遭受攻击的个体.研究学者借助模型预测控制方法主动调整控制输入以隔离遭受攻击的子系统[11].另一方面,有学者将攻击隔离问题转化为栈向量l0范数的最小化问题,通过枚举法搜索所有可能的攻击集合,从而完成攻击隔离[12].可以利用压缩感知方法将攻击隔离转化为凸优化问题进行求解[13].上述两种算法的复杂度较高,文献[14]采用分而治之的思想,通过分布式未知输入观测器和限定通信网络拓扑结构的方式完成攻击隔离.
在黑客技术高度发达的今天,攻击可能导致系统中的某些个体被“策反”,则应尽可能确保正常个体不受攻击的影响,以降级运行方式完成既定协同控制任务[15].在仅知道系统中遭受攻击个体最大数量的基础上,文献[15]提出了平均序列删减(mean-subsequence-reduced,MSR) 算法,正常个体通过删除所有极值邻居的方式排除攻击对其造成的影响,从而实现弹性协同.这种控制方式对系统通信拓扑的连通冗余性要求较高,文献[15]提出了图的鲁棒性概念来描述这种控制方式对通信拓扑结构的要求.随后,文献[16]引入可信节点,并提出了图的强鲁棒性概念来降低系统对图的要求.同时,考虑到个体的计算能力和通信带宽有限,研究学者通过提出事件驱动的量化弹性控制算法来提高控制策略的实用性[17-18].此外,复杂战场环境无法确保无人集群的稳定通信,文献[19]提出了图的联合鲁棒性概念,来应对时变通信情况下的弹性控制问题.值得注意的是,上述控制算法将邻居的状态信息作为删除的指标,因此,只适用于积分器型的系统.实际应用中,多智能体系统的模型复杂,因此,需要进行必要的改进.
对于一般多智能体系统模型,文献[20]利用基于相对输出测量的观测器方法进行攻击检测,使得某一智能体遭受的坏数据注入攻击可以同时反映在其自身和邻居的残差上,并提出图的可隔离性概念实现攻击的零漏报和零误报.文献[21]进一步提出了隐蔽攻击下的弹性稳定控制算法.文献[22]将上述攻击检测算法应用到通信链路遭受攻击情形下的弹性控制问题中.文献[23]考虑智能化坏数据注入攻击相互合谋的情况,在攻击合谋能力不受任何约束的前提下解决了合谋攻击的零漏报问题.
本文在攻击的合谋能力受限的情况下,拟对MSR 类算法进行改进,设计基于观测器的攻击检测与隔离算法,使得系统更新过程中仅删除已隔离邻居的信息,并探讨通信拓扑结构与零漏报攻击隔离和弹性协同控制之间的关系,为构建高弹性强抗毁的多智能体系统提供技术支持.相比于现有的研究成果,创新性总结如下: 1)文献[15-19]提出的MSR类算法只适用于积分器型的系统,本文所提出的基于攻击隔离的弹性控制算法适用于一般高阶系统,具有更广的适用范围.2)文献[23]未考虑攻击合谋能力的约束,本文在攻击局部合谋的前提下,降低了攻击隔离算法所需的拓扑条件.
1 问题的提出
1.1 通信网络结构
考虑由N 个智能体组成的多智能体系统,其通信网络结构用无向图G=(V,E)来描述,其中,V={1,2,…,N} 和E⊆V×V 分别表示智能体及其连边的集合.如果存在连边(i,j)∈E,则表示智能体i 和j 之间可以相互通信.图G 的邻接矩阵定义为A,其中,如果(i,j)∈E,则有aij>0,否则,aij=0.智能体i 的邻居集合表示为,其中,分别为智能体的邻居.智能体i 的内邻居集合表示为Ji={i}∪{Ni}.如果图G 中任意两个智能体之间均有一条连边,则称其是连通的.在图G 中,环指的是开始和结束于同一智能体的封闭路径,并用Ck表示由k 个智能体形成的环.
1.2 系统模型
考虑由N 个智能体组成的多智能体系统,借助反馈线性化方法将系统的动力学线性化[24],得到下列模型:
假设1 系统矩阵(A,B,C)能观能控.
根据智能体是否遭受攻击可以将系统中的智能体V 分为两个子集,即正常智能体集合O 和遭受攻击的智能体集合F,则有O∩F=∅和|O|+|F|=N.根据文献[15]给出遭受攻击智能体的数量模型.
定义1 (F-整体攻击模型) 如果集合F 中最多包含F 个智能体,则称多智能体系统遭受了F-整体攻击,即|F|≤F.
本文目标是设计抗合谋攻击的隔离算法确保隔离遭受攻击的智能体,并提出基于攻击隔离的弹性控制算法,使得正常智能体能够完成协同一致任务.
2 抗合谋攻击的分布式隔离
2.1 分布式攻击检测
为了检测智能体i 的内邻居Ji中是否存在攻击,分别定义智能体i 的状态一致性误差为,输出一致性误差为,提出如下基于相对输出信息的有限时间观测器:
假设2 对于两个遭受攻击的智能体i 和j 而言,只有当它们之间存在一条遭受攻击的通路,即存在有限序列(i,i1),(i1,i2),…,(ik,j),m=1,2,…,k,且im∈F 时,二者之间才能进行合谋.
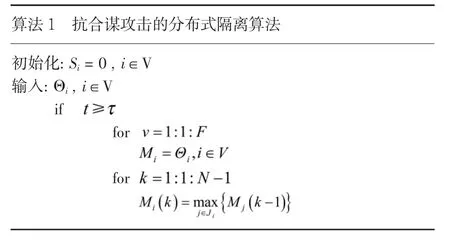
2.2 抗合谋攻击的分布式隔离算法
定义智能体i 的内邻居Ji的残差形成的栈向量为,其l0范数定义为.安全指标Si=1 表示智能体i 被隔离为遭受攻击的智能体,Si=0 表示智能体i正常.智能体i 的信息集定义为,对两个智能体i 和j 的信息集来说,若有,则称.接下来给出抗合谋攻击的分布式隔离算法,见算法1.
2.3 算法分析
为确保算法1 能够完成攻击隔离,回顾文献[23]中图的(r,s)-可隔离性定义.
定义2(图的(r,s)-可隔离性)对于给定的N个节点组成的图G=(V,E),如果下边3 个论述同时成立:
1)图G 是连通的;
3)图G 中所有的环都满足Ck,k≥s;则称图G 是(r,s)-可隔离的.
通过如下引理说明算法1 可以使得每个智能体以分布式方式得到.
引理1 文献[25]考虑由N 个智能体组成的系统,其中,智能体i 的动力学描述为:
接下来给出算法1 实现零漏报攻击隔离的充分条件.
(3)相关配套设施不够完善。就当前我国畜牧养殖现状来看,存在很多养殖场地址选择不当、相关配套设施不够健全等问题。在选址的过程中没能予以实地考察,这样的后果就会直接导致养殖场的周边环境恶劣,养殖条件不高,容易滋生细菌,致使动物极易患病。
定理1 对于满足假设1-2 的多智能体系统(1),在F -整体攻击模型下,算法1 完成零漏报攻击隔离的充分条件是图G 是(F,6)-可隔离的.
证明: 文献[25]的最大一致协议说明算法1 在(F,6)-可隔离图中能够确保每个智能体以分布式方式得到,保证了算法1 的分布式特性.
情况1) 中所有遭受攻击智能体的隔离都早于正常智能体j .
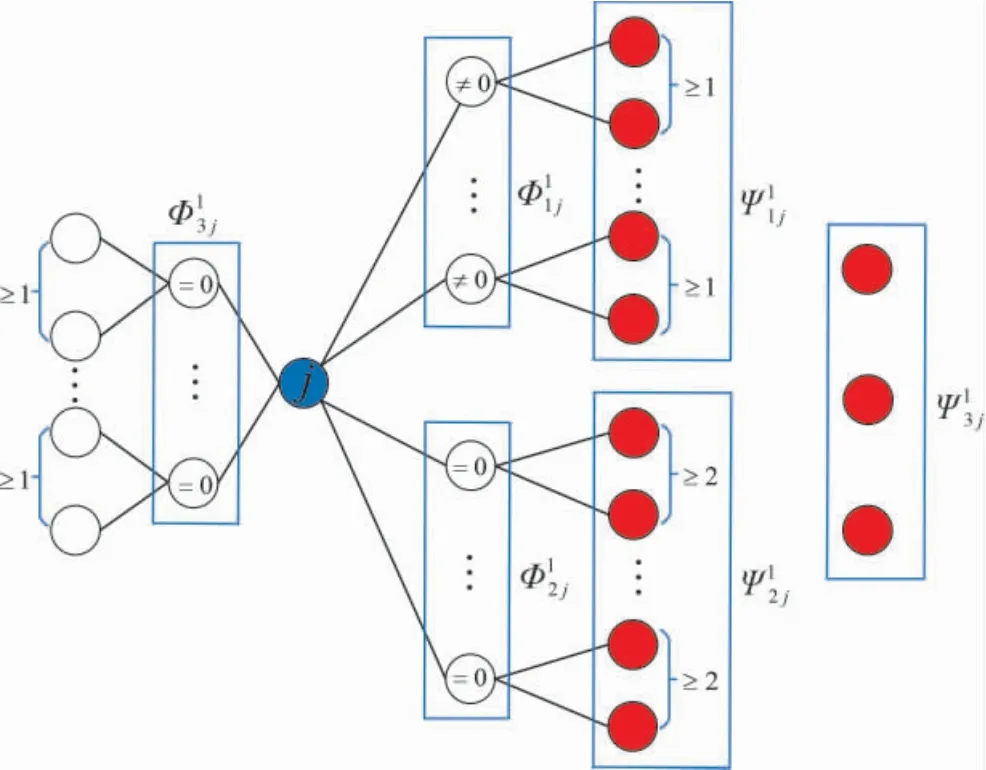
图1 情况1)下正常智能体与遭受攻击智能体之间的关系图Fig.1 The relationship between normal agentand the attacked ones under case 1)

图2 攻击在(F,6)-可隔离图和假设2 条件下的两种合谋方式Fig.2 Two kinds of ways of attack collusion under(F,6)-isolable graph and assumption 2 conditions
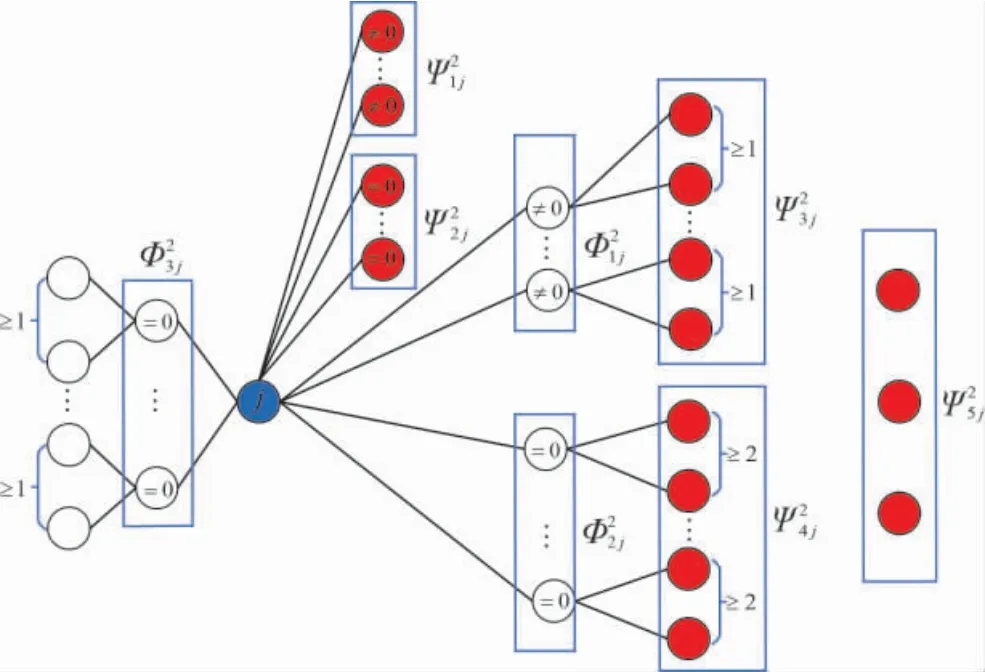
图3 情况2)下智能体j 与遭受攻击智能体之间的关系图Fig.3 The relationship between agentand the attacked ones under case 2)
情况3)正常智能体j 与遭受攻击智能体的关系与情况2)类似.差别在于,此时,各个集合之间的关系如下:
情况3)的分析类似于情况2),此处略去.
所有遭受攻击智能体的隔离都早于正常智能体.命题得证.
3 弹性一致性算法设计
当算法1 隔离所有遭受攻击的智能体后,正常智能体通过断开与遭受攻击智能体通信连边的方式来删除遭受攻击邻居对其产生的影响.正常智能体在断开与遭受攻击邻居的信息交互后,可采用文献[26]提出的控制协议,具体如下:

接下来给出算法2 完成弹性一致的充分条件.
定理2 对于满足假设1-2 的多智能体系统(1),在F -整体攻击模型下,算法2 完成弹性一致的条件是下面两个论述同时成立:
1)图G 是(F,6)-可隔离的.
4 仿真验证
考虑由14 个智能体组成的多智能体系统,其通信拓扑结构如图4 所示.智能体的系统矩阵描述如下:
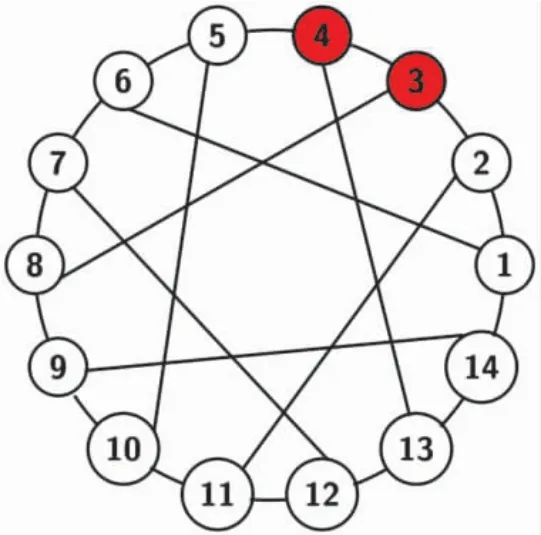
图4 多智能体系统通信拓扑结构Fig.4 The communication topology for the multi-agent systems
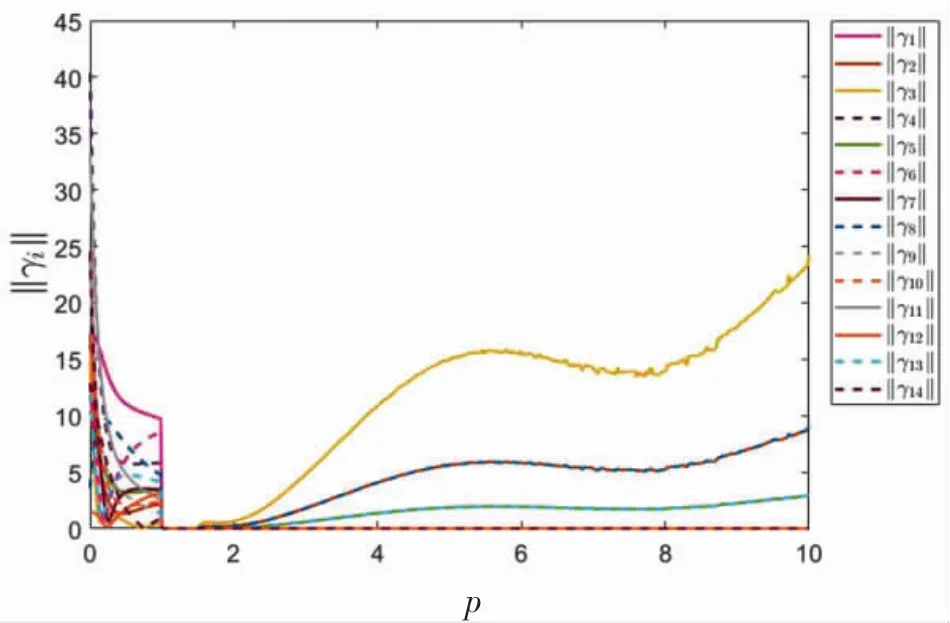
图5 智能体的残差轨迹图Fig.5 The residual trajectory for each agent
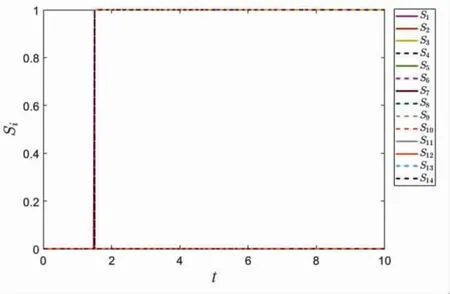
图6 智能体的安全指标图Fig.6 The safety index for each agent
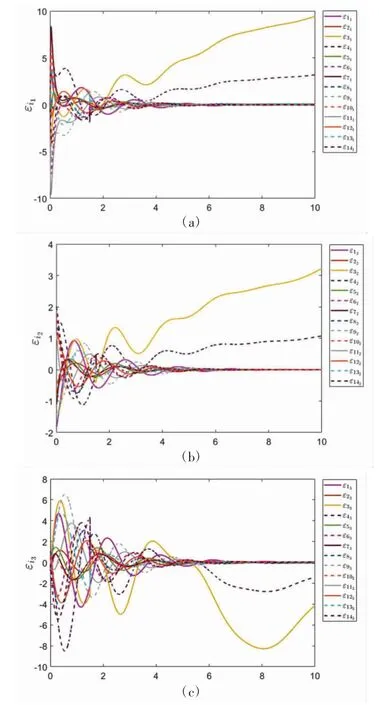
图7 智能体的状态一致性误差轨迹图Fig.7 The state consistency error trajectory for each agent
5 结论
本文研究了多智能体系统遭受合谋攻击下的弹性一致性问题.提出了基于分布式有限时间观测器的抗合谋攻击隔离算法,利用已隔离的智能体解耦攻击间的合谋,并借助图的隔离性确保攻击的零漏报.在此基础上,提出基于攻击隔离的弹性控制算法,在部分正常智能体被误隔离的基础上,实现所有正常智能体的弹性一致.通过数值仿真验证了所提算法的正确性.接下来将进一步探讨图的可隔离性的等价条件,扩展攻击隔离算法的适用范围.
猜你喜欢
城市建筑空间(2021年10期)2021-11-30 12:13:28
中国质量监管(2016年10期)2016-07-10 10:24:23
铁道科学与工程学报(2015年5期)2015-12-24 12:12:08
深空探测学报(2015年3期)2015-12-07 11:15:06
电测与仪表(2015年19期)2015-04-09 11:32:56
系统工程学报(2015年5期)2015-02-28 19:54:06
现代企业(2015年6期)2015-02-28 18:52:34
现代企业(2015年2期)2015-02-28 18:45:55
卫生职业教育(2014年20期)2014-05-16 03:17:28
电测与仪表(2014年11期)2014-04-04 09:21:36