基于改进BAS 算法的断路器操动状态辨识方法
2024-01-24 10:10吴志勇王东方付晨晓
电子设计工程 2024年2期
吴志勇,王东方,付晨晓
(国网宁夏电力有限公司吴忠供电公司,宁夏吴忠 751100)
断路器是电力系统的重要维护装置,一旦系统处于异常运行状态时,可立即切断故障电源,以保证整个电力系统正常运行。断路器常见的故障操动机构相关缺陷约占总缺陷的一半,是运行维护的重点。在工作过程中,由于环境侵蚀,导致电磁铁芯和传动件轴销腐蚀。据统计,锈蚀及异物缺陷约占5%,严重的腐蚀造成启闭弹簧能量释放不足,机构动作卡死,启闭速度下降,甚至不动作。因此,对断路器操作机构的腐蚀情况进行正确评价和及时处理,是保证电网运行安全的关键。近几年,国内外学者一直研究高压断路器辨识工作。文献[1]提出基于振动信号谱形状熵特征的辨识方法,该方法首先利用自适应噪声集合的经验模态分解方法,将频率结构的非平稳信号逐步拆分,获取不同频段特征分量,然后将筛选的结果转换到功率谱子区域极坐标。根据波散分布特点,计算谱形状熵,并由此构建支持向量机模型,实现对断路器操动状态的精准辨识;文献[2]提出基于图像深度学习的辨识方法,该方法首先根据断路器工作原理,设定一种评价指标体系,结合主客观赋予权重的方法获取指标权重。使用YOLO 深度学习算法识别操动机构的异常位置,通过模糊综合评价方法获取辨识结果。但使用上述两种方法容易陷入局部最优,导致辨识结果不精准。因此,使用改进BAS 算法辨识断路器操动状态。
1 断路器操动机构分析
断路器通过操动机构控制触头的开闭实现开关自由开闭。在运行过程中,线圈电流可以真实反映电磁体自身、受控阀门和联锁触头的运行状况,并含有大量有关断路器运行机制的机械性能信息[3-4]。因而,其在故障监控和诊断中得到广泛应用。断路器分(合)绕组的操动机构是由电阻器和电感器组成,其结构如图1 所示。
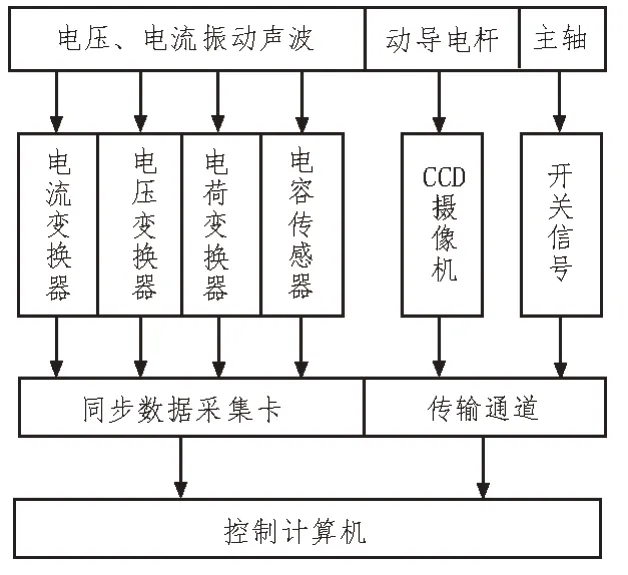
图1 断路器操动机构
由于未合闸的电磁铁在断路器操动过程中,一直处于不饱和状态,此时电感与线圈电流无关,只与电磁铁气隙有关,由此得到的断路器操动机构电压为:
式中,R表示线路电阻;I表示动作电流;ϕ表示电感;ε表示电磁铁气隙;v表示线圈运行速率[5]。在断路器工作时,电磁线圈被激励,电流增加,磁芯的吸力也随之增加[6]。
2 改进BAS算法断路器操动状态辨识
天牛须搜索算法原理简单、计算效率高,但是其个数很小,搜索空间很小,容易陷入局部最优。针对以上问题,改进BAS 算法,并结合自适应步长提出群组与竞争机制[7]。采用随机分配的方法,将天牛须搜索空间中一定数目的天牛作为群体,并结合群体学习方法改善搜索范围。由于天牛信息之间可以进行信息交互,因此,增强整体的搜索能力和收敛性。
2.1 断路器操动状态搜索
改进BAS 算法的应用原理是天牛觅食原理,基于该原理设定的随机单位向量为:
式中,n表示维度;r表示随机向量[8-9]。根据式(2)计算结果,计算天牛左右须位置:
式中,λt表示学习因子;表示感知范围内的最优天牛位置。然后,重复地更新每只天牛所在位置。在每次更新后,适应度计算结果由式(3)的左右位置确定,并对最优的适应性函数进行及时更新[13]。最后,将两组总体优化适应度进行对比,并获取最佳初始位置和适应值,结合这些数值可得到最优搜索结果。
2.2 特征参数提取
断路器振动信号的各个频率成分含有大量的工作状态信息和故障特性。在断路器操作机构出现故障时,所获取的振动信号中同一频率能量波动较大,可用局部平均分解能量作为特征矢量进行断路器故障诊断[14]。利用LMD 方法提取所获得的振动信号,并将它们加入到特征矢量矩阵中。该特征参数的提取过程如下:
使用LMD 方法分解搜索的断路器操动状态信号,由此得到的总能量为:
式中,ej(t)表示j个分能量。将离散信号分量的总能量进行归一化处理,可得到离散信号分量的总能量[15]。以该信号分量归一化结果为依据,构造特征向量为:
为保证算法的精确度,使用步长因子控制搜索范围。为避免出现搜索区域过小而导致计算结果陷入局部最优的问题,设置最大初始步长[16]。其计算公式如下:
式中,Lt表示天牛经过第t次迭代后的步长因子;ξ表示步长衰减系数。该步长的设定由线性递减权重决定。初始化处理天牛初始位置,将其存储到最佳适应度函数集中。同时,在适应度函数的基础上,记录所有天牛最佳位置,即为特征向量。
2.3 操动状态辨识
在整体寻优过程中,个体间的求解总是趋向于最优解,从而使得类似解总是在最优解附近。基于此,引入拥挤度指标竞争机制,对某些具有类似特征的群体进行筛选,并对群体进行动态调整。第t次迭代处理后个体i、j之间的欧氏距离为:
式中,δ表示拥挤度阈值。当计算结果小于δ时,说明断路器操动状态正常,即合闸正常;当计算结果大于δ时,说明断路器操动状态异常。
对于异常操动状态,可用指标权重来区分,判断矩阵为:
式中,m、n分别表示矩阵的行数和列数。结合判断矩阵,得到各层指标的综合评判向量αi,该向量可分为操动状态异常位置α1和等级的各层模糊综合评价向量α2,由此对断路器操动异常状态综合评判,公式为:
充分考虑断路器实际运行状态,构建操动异常状态评语集,主要包括三个等级:一般、预警、危急,利用三角形-梯形隶属度函数表示断路器操动状态,如图2 所示。

图2 异常操动状态
由图2 可知,对于弹簧疲劳,预警评分在[0-40]区间,属于一般状态;对于铁芯卡涩,预警评分在[40-70]区间,属于预警状态:对于轴销脱落,预警评分在[70-100]区间,属于危急状态。根据该辨识依据立即处理危急状态,避免进一步发展。
3 实 验
3.1 实验平台
为进一步验证基于改进BAS 算法的断路器操动状态辨识方法的实际控制效果,搭建如图3 所示的硬件实验平台。

图3 硬件实验平台
在Matlab/Simulink 环境中,开启编译base,并运行ccs61,该实验平台与马达驱动试验盒及主机连接。用cspace 软件实现DSP 的C 语言编程,并用主处理器进行线上调试。
3.2 实验数据
为明确分析实验数据,使用一种谱形状熵描述断路器操动状态细节特性,并确定其与机械失效、零件状态之间的联系。采用最大值方法,能够有效地保存各个成分之间幅值比例关系,从而保证原始信号完整性。经发散因子将频谱的波形变换成极坐标,获得实验数据如图4 所示。

图4 各状态分量功率谱极坐标图
由图4(a)可知,正常合闸下发散因子转换到[0-90°]、[270°-360°]区间内;弹簧疲劳下发散因子转换到[0-90°]、[210°-360°]区间内;铁芯卡涩下发散因子转换到[0-90°]、[150°-360°]区间内;轴销脱落下发散因子转换到[0-360°]区间内。将各状态分量功率谱极坐标作为标准数据,进行实验验证分析。
3.3 实验结果与分析
分别使用文献[1]、文献[2]、所提方法辨识断路器操动状态,得到各状态分量功率谱极坐标如表1所示。

表1 不同方法下各状态分量功率谱极坐标
由表1 可知,使用文献[1]、文献[2]、所提方法在正常合闸下各状态分量功率谱极坐标与实际坐标一致。使用文献[1]、文献[2]在弹簧疲劳、铁芯卡涩、轴销脱落状态下功率谱极坐标与实际坐标均不一致。使用所提方法只有在铁芯卡涩状态下,功率谱极坐标与实际坐标不一致,存在30°的误差,其余均一致。
基于上述辨识结果可知,使用所提方法辨识结果更精准,由此得到的实际异常状态示意图如图5所示。

图5 实际异常状态示意图
由图5 可知,对于铁芯卡涩异常状态,可能会出现断路器连接管红色现象,严重会烧毁连接管;对于轴销脱落异常状态,可能会出现断路器连接轴烧毁现象,严重会损毁整个断路器。
4 结束语
断路器操动过程的振动信号与弹簧、铁芯和轴销有关,其能够反映断路器在运行过程中的特殊缺陷和故障。在此基础上,给出一种基于改进BAS 算法的断路器操动状态辨识方法。这种方法可以正确地辨识出断路器操动的异常状态,并通过实验验证该方法研究的合理性。
猜你喜欢
成都信息工程大学学报(2021年5期)2021-12-30
小哥白尼(野生动物)(2021年1期)2021-07-16
河北理科教学研究(2020年1期)2020-07-24
小学生必读(低年级版)(2018年10期)2019-01-04
故事作文·低年级(2018年10期)2018-10-25
中学数学研究(广东)(2018年23期)2018-03-05
作文与考试·小学低年级版(2015年11期)2015-07-17
河北科技大学学报(2015年5期)2015-03-11
电测与仪表(2014年2期)2014-04-04
电力自动化设备(2013年11期)2013-09-18