基于分布式光纤光栅碳纤维复合材料的飞机火警定位
2024-01-15 10:47伊重瑾
武汉理工大学学报(信息与管理工程版) 2023年6期
王 献,伊重瑾,杨 勇
(1.武汉市消防救援支队,湖北 武汉 430021;2.武汉理工大学 光纤传感技术与网络国家工程研究中心,湖北 武汉 430070)
飞机飞行安全是航空工业和民航领域的核心关注点,旨在确保飞机在各种条件下的飞行中最大程度降低事故风险,飞机火灾事故的发生概率相对较低,但是火灾一旦发生,其后果可能非常严重。因此飞机火灾报警系统是飞机上十分重要的安全设备,用于检测和报警飞机上可能发生的火灾或烟雾事件。该类系统经过研究和设计,能确保对火灾和烟雾的及时检测和报警,这些技术包括光电探测、离子化烟雾探测、红外探测等[1-2]。其中,光纤光栅传感器作为一种高效的火灾报警装置具有体积小、重量轻、反应迅速灵敏度高等优点。光纤光栅传感的基本原理是利用光纤光栅有效折射率和光栅周期对外界参量的敏感特性,通过检测光栅反射的中心波长移动实现对外界参量的测量。光纤光栅器件在飞机火灾报警系统中可用于温度监测和火源检测,预防潜在的火灾或高温事件的发生。在发现异常情况时立即发出警报,为乘客和机组人员提供更安全的飞行环境[3-4]。
传统光纤光栅传感技术对热源位置的检测并不精确,在大面积区域出现火情时无法快速确定火源位置,需要对其进行优化。火源定位技术是飞机火灾报警的关键一环,这对于及早采取适当的灭火措施、减小火灾造成的损失和确保人员安全非常重要。由于飞机的组成结构上采用了大量的复合材料,通常包括纤维材料(如碳纤维、玻璃纤维)和基体材料(如聚合物树脂)[5-6],需要对光纤光栅在该类材料上的性能进行研究。复合材料具有轻量化、强度高刚度高、抗腐蚀、设计自由度广、疲劳性能良好等优点而被广泛用于飞机结构的各个部分,包括机翼、尾翼、机身、舱壁、襟翼等。因此,在实验研究当中,采用了碳纤维板模拟机翼板材,设计在碳纤维板上光纤光栅火源定位系统。
基于光纤光栅传感技术的火源定位实际流程包括:①传感器部署,在需要进行火源定位的区域内,沿着关键部位或结构周边布置光纤光栅传感器。②数据采集,光纤光栅传感器通过监测光纤中的光信号变化来捕捉环境参数的变化,如温度、应变、压力等。当火源附近的参数发生变化时,传感器会记录这些数据。③数据传输,传感器数据被传输到中央数据处理单元,可以通过光纤连接或无线通信实现,数据传输是实时的,以便及时分析和响应。④数据分析,中央数据处理单元会对传感器数据进行分析,以确定哪些传感器受到了火源附近参数的影响,这些数据可以与传感器的位置信息相结合。⑤火源定位算法,使用专门的火源定位算法来处理数据,以确定火源的位置。⑥警报和应急响应,一旦确定了火源的位置,系统可以发出警报,启动火灾应急响应措施,如灭火系统的激活、警报的发出或疏散程序的启动[7-10]。总的来说,实时定位的分布式光纤光栅传感器的应用有助于确保飞机的结构和系统处于良好的工作状态,减少了热问题可能造成的风险。同时,它还可以提高飞机的可靠性,并降低维护成本,对可能出现的问题事先做好诊断和修复。基于光纤光栅传感技术的复合材料火源定位方法具有高精度和实时性的优点,适用于航空安全领域中精确定位火源的关键应用。
1 分布式光栅定位热源的理论分析
为了在飞机机翼精准测得着火点位置,不同于在光纤线路上进行一维传感[11-13],设计了一种基于光纤光栅温度传感的多点位二维平面上的测温装置。在机翼内部的蒙皮材料上附着分布式光栅,为了模拟飞机上的复合材料,将使用碳纤维板作为替代,其具有各方向导热均匀,热导系数稳定等优点,如图1(a)所示。在该板材上搭建了实验装置,在厚度为5 mm的准各向同性碳纤维板上固定了一段U型光纤,如图1(b)所示。其中,U型光纤上分布有6段栅区长度均为10 mm的切趾光纤Bragg光栅。室温条件下,各光栅的峰值波长分别为1 540.174 nm、1 544.783 nm、1 550.249 nm、1 544.870 nm、1 560.118 nm和1 565.063 nm,6段光栅边缘的间距均为60 mm。如图1(c)所示,在该装置的下方设置了由直流电源控制的可加热铜棒作为模拟火源。通过改变加热铜棒在板下的位置可以测试该装置对火源的定位效果。
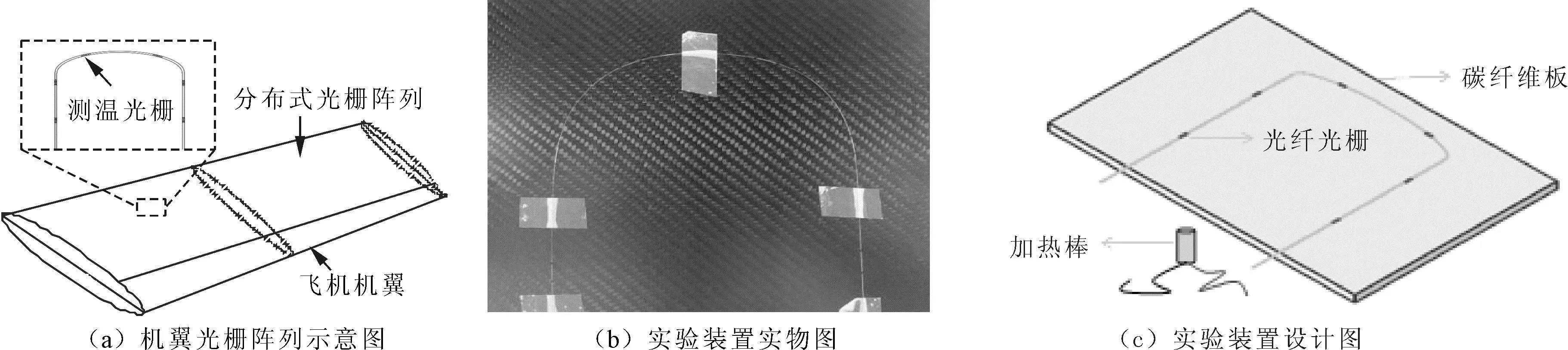
图1 光栅阵列示意图
1.1 光纤Bragg光栅测温原理

(1)
对于二氧化硅制备的光栅,在不考虑外界其他因素影响时,根据光纤Bragg光栅的光栅方程λB=2neffΛ可得光纤光栅的温度灵敏度系数:
(2)
式中:ΔT为温度的变化量;αn为热光系数;αΛ为线性热膨胀系数。可以发现波长的变化量与温度的变化线性相关,通过程序拟合得到的峰值波长能根据上式解得此时光栅栅区对应的温度。
1.2 分布式光栅定位热源原理
实验通过分布式光栅对温度的响应反推出热源的位置,因此还需要确定导热板材上温度的分布情况,温度最高的位置即为热源。首先要确定各点的坐标位置,如图2所示。将碳纤维板的底边作为x轴,底边中点为原点,并作出相应的y轴。装置中6段实验光栅由波长从小到大标号为1、2、3、4、5、6,它们的中点坐标分别为(7.5,3)、(7.5,10)、(3.5,15)、(-3.5,15)、(-7.5,10)、(-7.5,3)。
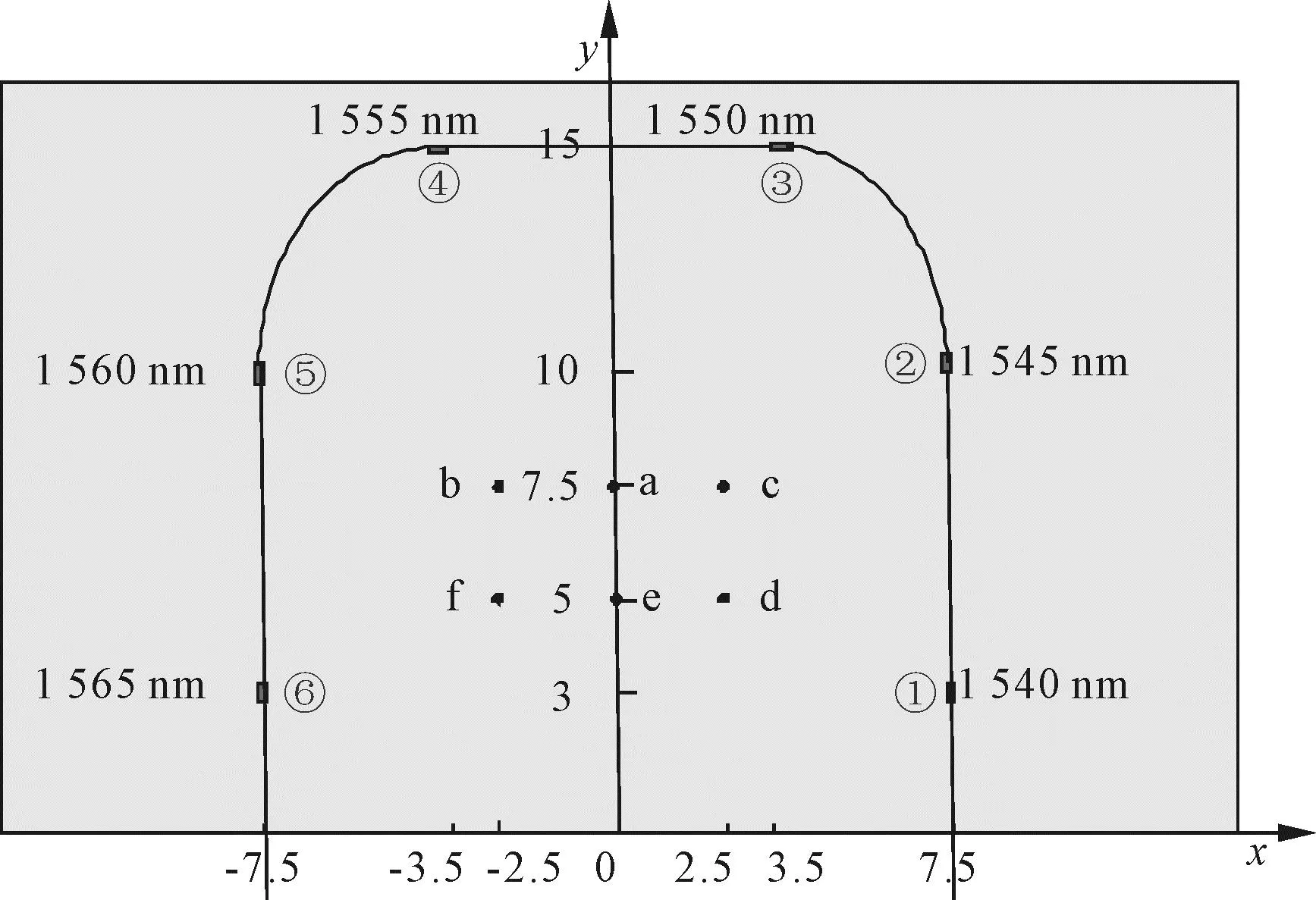
图2 装置坐标图
在这样一块碳纤维板下表面放置的热源是温度固定但位置不确定的。求出不同位置热源和各光栅之间的距离,得到的值若与光栅温度呈固定的函数关系,就可以解出热源坐标,实现定位功能。
将碳纤维板的导热系统看成是一个圆柱,圆柱上表面圆心处即为着火点,坐标为(x,y),圆柱上表面半径为r,此处温度为t,面积A=πr2,根据傅里叶定律,热流量可以表示为:
(3)
式中:λ为碳纤维板的导热系数,由于铜加热棒的功率固定,这里的Φ设置为一定值。将该式积分并根据边值条件r→∞,t=23 ℃可以解得温度随半径变化的关系式:
(4)
因此可以根据光栅的温度得到光栅到着火点的距离r。设1号光栅和2号光栅的坐标分别为(x1,y1),(x2,y2),他们到着火点的距离为r1,r2,根据式(5)可解得(x,y),实现定位的目的,六点位光栅能测得多组数据减小误差。
(5)
2 实验的设计与验证
2.1 光纤Bragg光栅测温曲线的标定
由于实验中的Bragg光栅温度灵敏系数并不确定,需要通过标准测温光栅测量6段实验光栅的温度变化。已知测温光栅在的室温下的波长为1 550.156 nm,测温光栅的温度系数为10 pm/℃,将这样的测温光栅依次与6段实验光栅放在同一位置。根据式(1),用软件拟合得到的反射曲线如图3所示,可以读出对应的峰值波长,得到第三段光栅对应的温度和峰值波长如表1所示,绘制图4,计算出斜率k=10 pm/℃,即为实验装置中3号光栅的温度系数。再对其他5段光栅进行测量,温度系数的结果一致,均为10 pm/℃,这样便确定了光栅反射谱中心波长和光栅栅区温度的关系。

表1 3号光栅峰值波长和温度的关系表
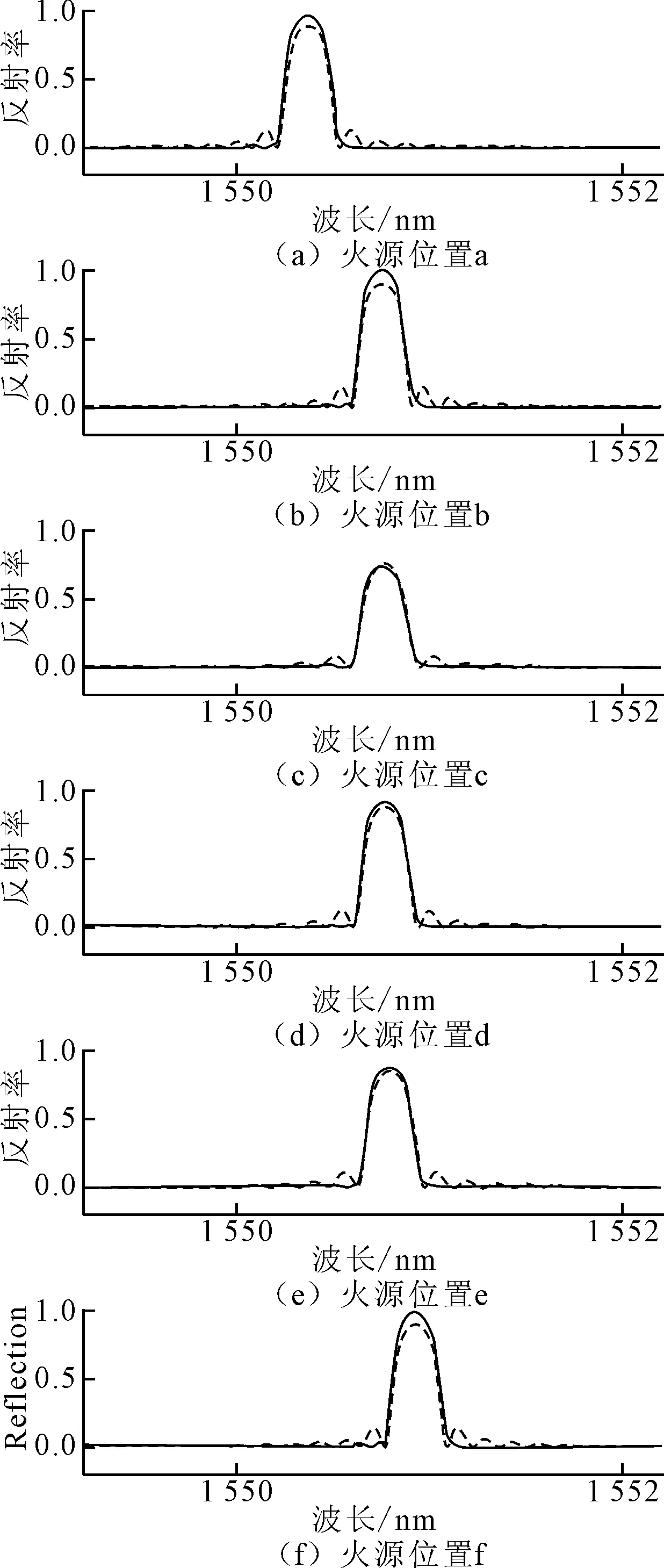
图3 3号光栅波长在不同温度下的反射率
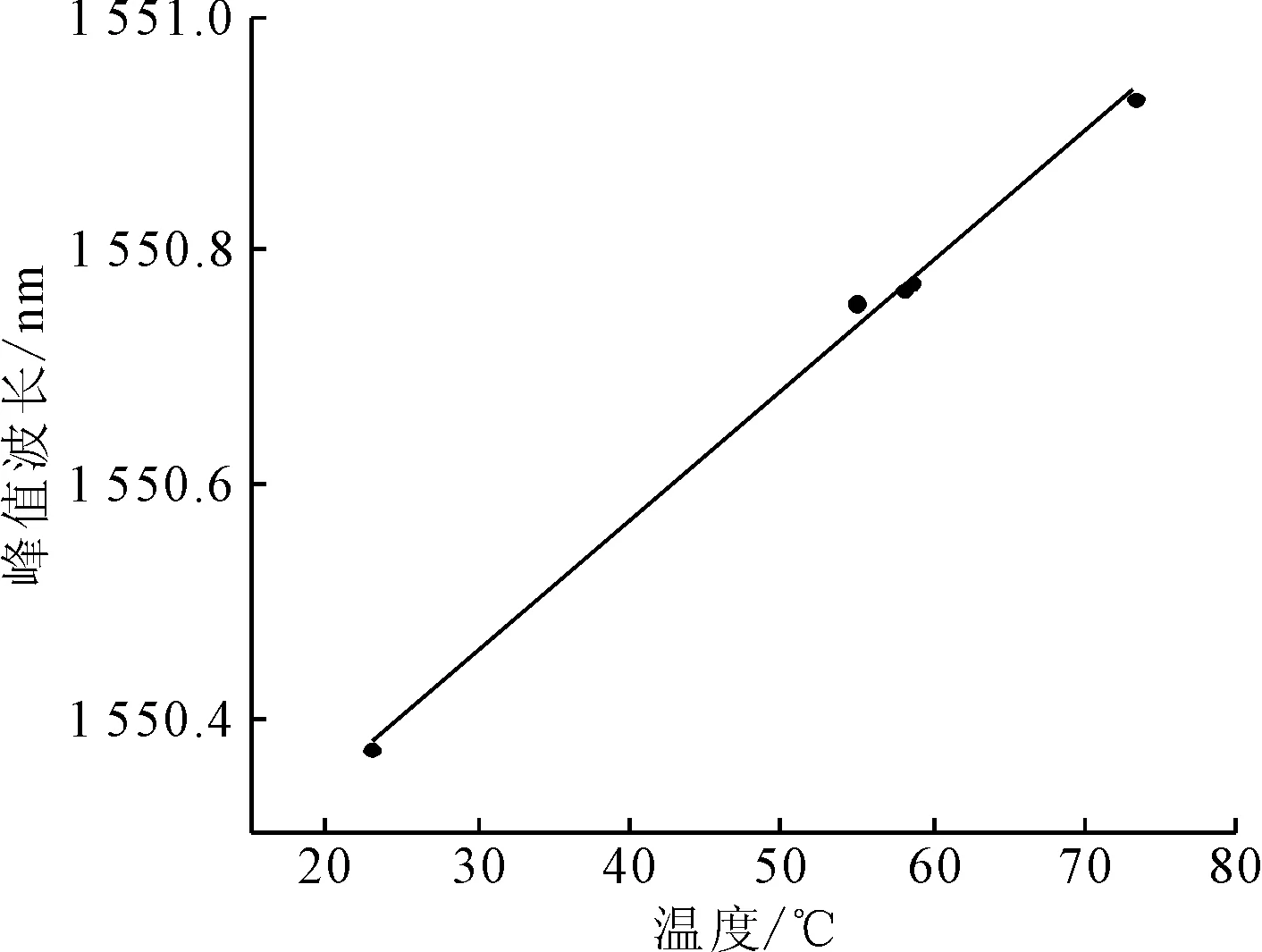
图4 3号光栅峰值波长随温度的变化图
2.2 利用定位装置确定着火点坐标
确定好实验中6段光栅的测温曲线后即可进行下一步实验。在碳纤维板的底部选取了a、b、c、d、e、f共6个点模拟火源位置,见图2中圆点,坐标分别为(0,7.5)、(-2.5,7.5)、(2.5,7.5)、(2.5,5)、(0,5)、(0,-2.5)。同一功率的加热铜棒依次放置在这6个点位,即可以测得同一温度不同位置热源条件下给6段光栅带来的波长漂移。
实验结果如图5所示,利用python依据式(1)对测温曲线进行拟合可以得到各段光栅的峰值波长,将相应的波长代入式(2)中可解得每段光栅对应的温度。峰值波长、温度与光栅到热源的距离如表2所示。
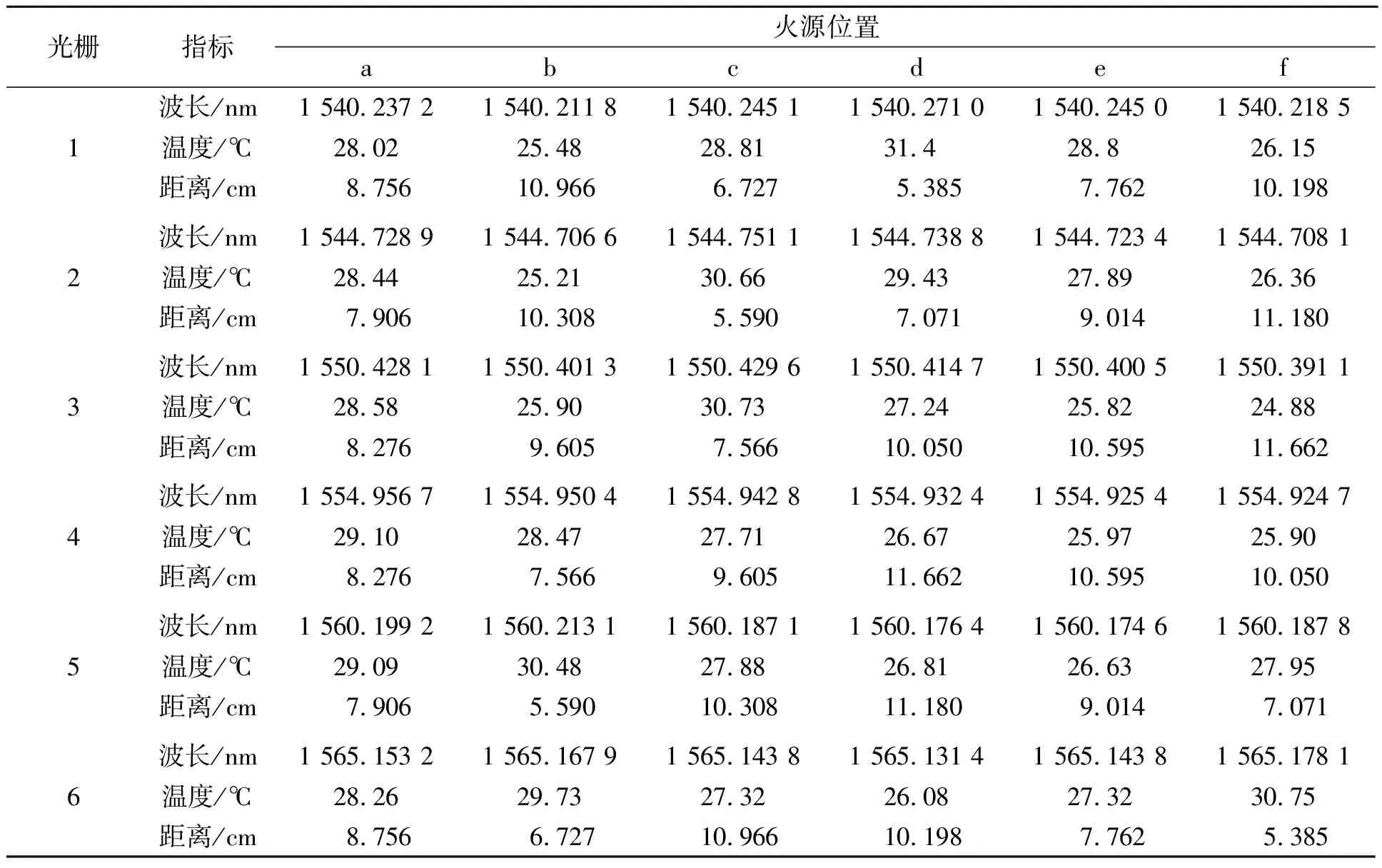
表2 各段光栅峰值波长、温度距离的关系表
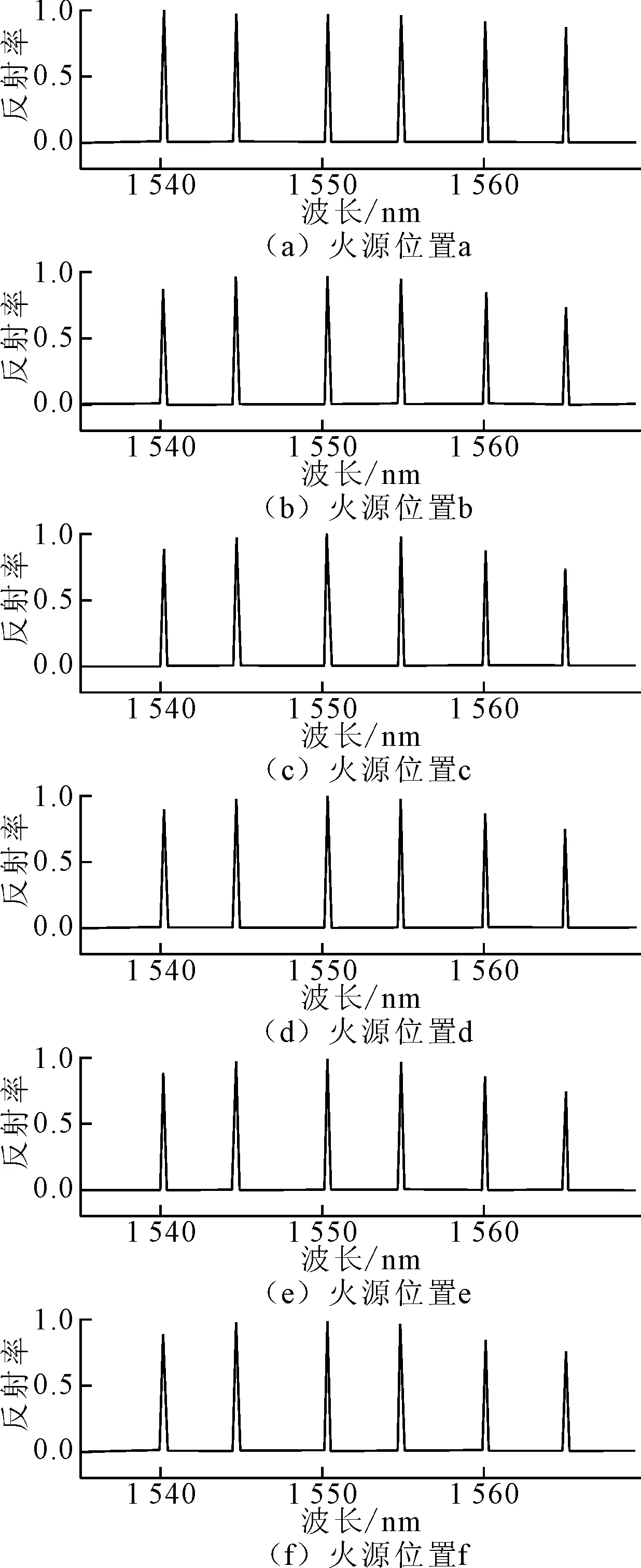
图5 各点位光纤波长与反射率的关系图
由于加热铜棒输出功率固定,这里的热流量Φ为一定值,碳纤维板的导热系数也为定值,因此Φ/λ应当为一常数。根据式(4),将6段光栅温度与距热源距离作图并拟合可得图6,6组拟合曲线的Φ/λ值如表3所示,可以发现它们近乎为一定值,对6者求平均得到Φ/λ=41.155 5 ℃/cm,该系统光栅温度-热源距离关系式即可确定为:
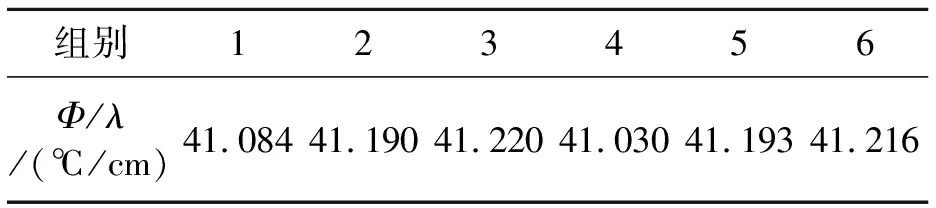
表3 各段光栅Φ/λ系数表
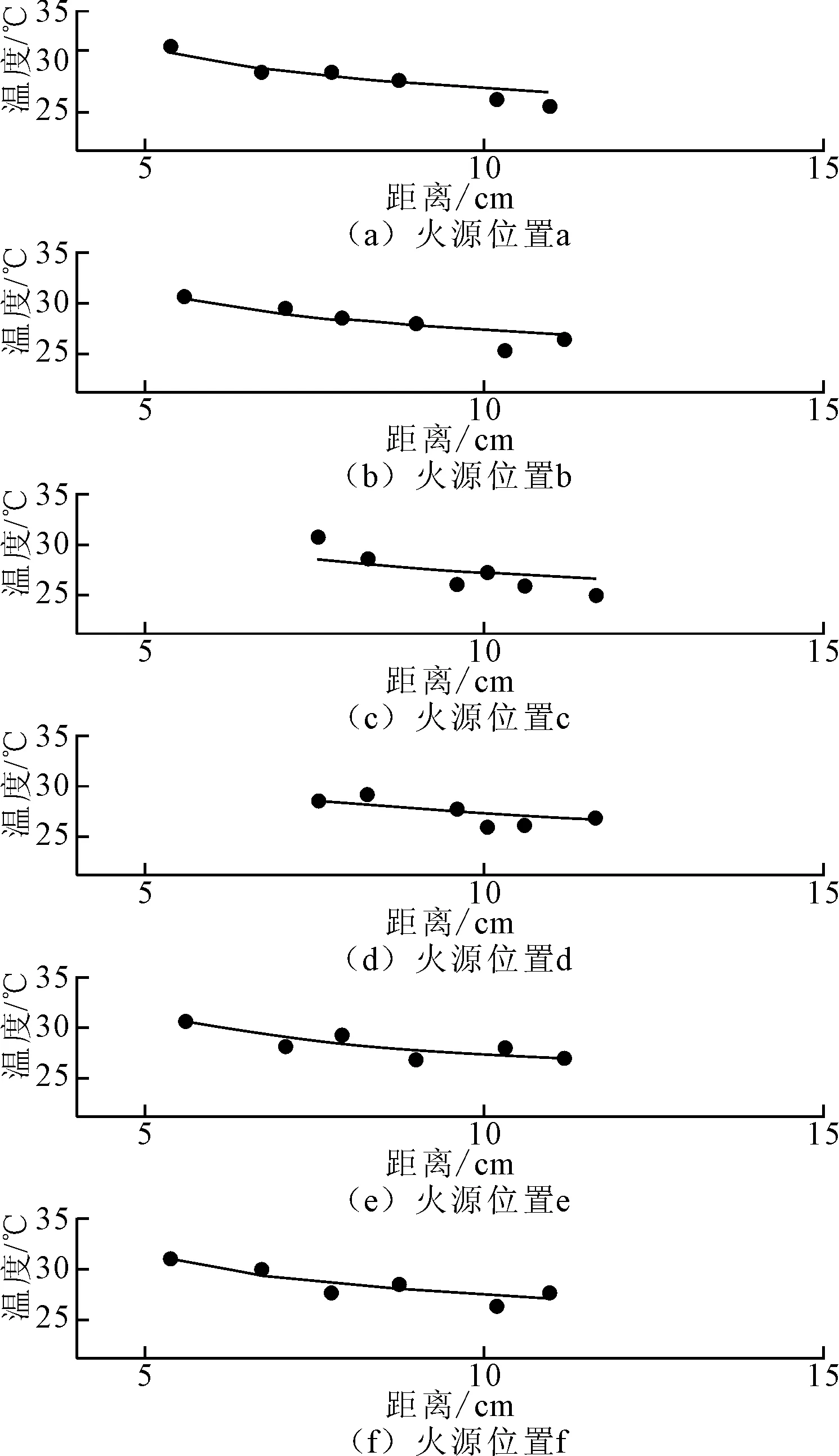
图6 热源距离与光栅温度的关系图
(6)
式(6)即为碳纤维板上的温度分布。因此,通过两段光栅峰值波长的变化就能反推出热源的精确坐标,多段光栅的组合也进一步提高了系统的定位精度。
将光栅的温度数据代入式(6)可得不同光栅与火源的距离,在该过程中去除两组与其他组别相差明显的数据后,剩下的4组数据两两组合;再根据式(5)求得坐标,如表4所示。
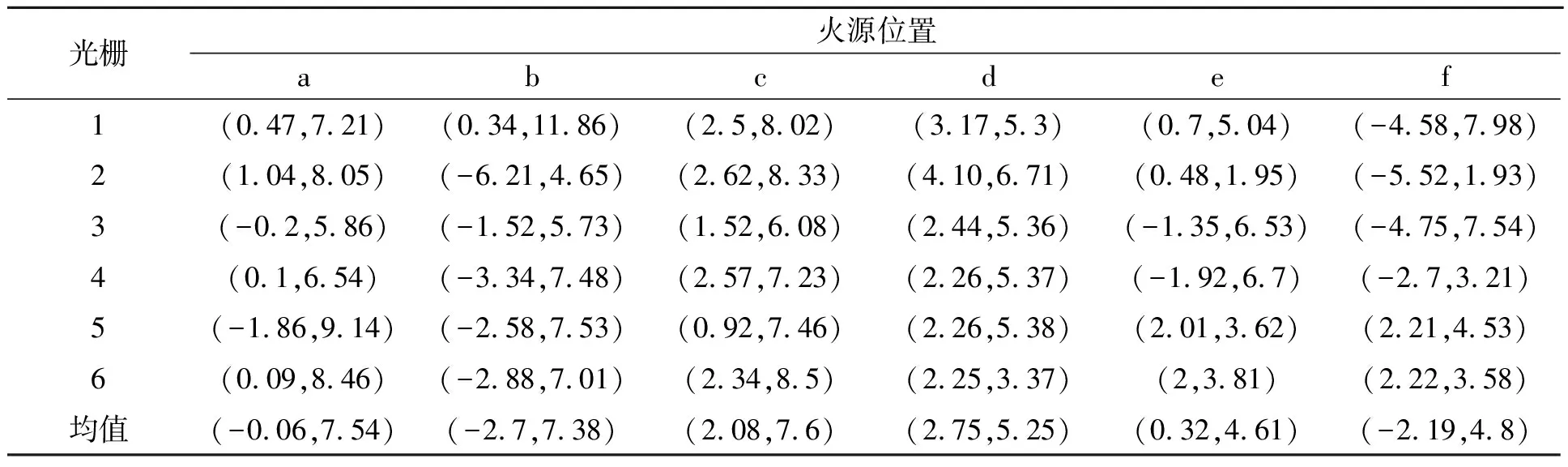
表4 各点推算坐标
根据结果可以发现火源实际坐标与推算坐标之间的误差小于5 mm。利用光矢量分析仪可以在1 s内将波长数据进行记录,随后经程序计算能在1 s内确定着火点坐标。
3 结论
(1)为了在复合材料板材上精确定位着火点,笔者设计了一种分布式光纤光栅测温装置,理论分析了该装置的可行性并进行了实验验证。
(2)实验上制备并组建了该装置,在一根光纤上刻蚀出6段峰值波长不同但栅区长度、边缘间距相等的光栅,将这样的光纤光栅以U形粘连在复合碳纤维板上即可实现对热源的定位。
(3)由于光纤光栅波长随温度线性变化,碳纤维板上的温度分布和热源距离又具有固定的函数关系,因此,基于光栅反射谱的峰值波长能够得到该光栅栅区到热源之间的距离。通过6组光栅中心波长的变化求解出距离能够精确地反推出热源坐标,即着火点的位置。
(4)后续进行的实验对光栅阵列中的6个点位进行了测试,通过每段光栅不同的波长信息推导出了栅区温度与两点间距离的关系式。将数据带入进行验证,可在5 mm误差的范围内推导出着火点的坐标,整个系统具有较短的响应时间。
猜你喜欢
水上消防(2021年5期)2022-01-18
初中生学习指导·中考版(2020年12期)2020-09-10
森林防火(2019年1期)2019-09-25
国际木业(2018年3期)2018-09-10
中国科技财富(2017年4期)2017-06-05
上海公路(2017年3期)2017-03-01
国际木业(2016年12期)2016-12-21
山东林业科技(2016年5期)2016-07-05
核安全(2016年1期)2016-06-29
广西林业科学(2016年1期)2016-03-20