
基于遗传算法的交叉口信号配时优化研究
2024-01-11 03:12:02刘克非
黑龙江工业学院学报(综合版) 2023年10期
张 军,刘克非
(安徽理工大学 1.人工智能学院;2.机械工程学院,安徽 淮南 232001)
城市道路作为城市中的筋脉,而交叉口更是各种混合车辆,行人聚集、转向和疏散的必经之处。随着我国城市化进程的持续推进和经济的不断发展,汽车保有量也逐年提升,交叉口处常常出现交通拥堵现状,尤其是在大城市,现有的空间资源无法满足现实巨大的交通通行需求,交通拥堵现象尤为突出,迫切需要解决。而平面交叉信号配时优化无需大规模改扩建平面交叉口的空间资源,却能减小道路交通压力,不失为一种费用低、见效快的行之有效的方法。所以通过交通信号控制与管理来解决当前交通问题是关键。
最基本的单点交叉口信号配时多采用固定信号配时,最经典也是当下最常用的是Webster算法,它是以平均车辆延误最小作为唯一优化目标的信号配时方法,该方法对于高峰时期的情况存在着实际延误大于计算延误的问题。且单目标优化得到的配时方案不能够满足真实交叉口通行需求。在交通拥堵现象日趋严重以及节能减排意识深入人心的背景下,众多研究者们便着手进行交通信号配时模型的全新研究。国外Soheil等[1]以车辆和行人总延误时间最小为目标来优化单个交叉口的信号配时;Zhang等[2]以通行能力、延误和尾气排放为目标建立信号配时问题的多目标模型,利用NSGA-III方法对目标模型求解并通过对比证明了该方法的优越性;Yang等[3]人提出了一种基于改进遗传算法的相邻交叉口主干道协调信号控制方法,通过分析主干道交叉前车队车头和车尾遇到的信号状态,建立以车辆长度,信号时间和相位差为优化参数的优化模型,优化求解表明改进遗传算法优于传统遗传算法和标准代数方法;Park等[4]提出一种固定信号周期的随机信号优化方法,以绿信比/周期长度、相位等为多目标进行同时优化。国内众多研究者在信号配时优化方面也取得了许多进展,如伍尚昆等[5]利用改进的蚁群算法对交叉口平峰和高峰两个时段进行了多目标信号配时优化并对模型进行了验证,但平峰阶段经典Webster算法所得总延误时间最短。刘畅等[6]以平面交叉口的平均延误和平均CO排放为目标,建立多目标信号配时优化模型,用粒子群算法求解信号配时。李振龙等[7]以车辆延误、排队长度及尾气排放量三个评价指标,建立了平面交叉口信号配时最优模型,利用遗传算法解非线性函数模型。
本文以交叉口车辆平均延误,车辆平均停车次数和交通行能力为效益评价指标,并以淮南市某一典型交叉口为例,根据交叉口实际交通数据,采用遗传算法优化交叉口信号配时,对现有方案,Webster算法和遗传算法方案进行了比较,并分析了不同配时方案下交叉口通行效益变化。
1 建立多目标优化模型
1.1 优化目标的选取
交叉口交通效益的关键评价指标包括延误、饱和度、车辆排队长度、停车次数、油耗、通行能力和污染物排放等[8]。信号交叉口延误指由交叉口处信号控制导致交通流不连续造成的车辆通行时间的丢失,包括均匀延误、随机延误、过饱和延误等。其中均匀延误是指假设车辆均匀到达时产生的延误;所谓随机延误,就是指信号周期内车辆到达的随机波动性产生的延误;过饱和延误是指车辆数大于交叉口通行能力时,滞留车辆额外产生的延误[9]。延误作为评价交叉口服务水平、车辆通行效率的一个重要指标,既体现了交叉口信号控制方案的合理性,也能体现道路渠化设计的优劣。通行能力又称道路容量,是指道路的某一断面在单位时间内通过车辆的最大数量,数据表明,交通拥堵大多是由于平面交叉口的通行能力不足造成的,故提高通行能力是提高交通效益和道路利用率的关键。停车次数是指车辆通过交叉口时由于信号控制造成停车的次数,即车辆在受阻时的停车程度,停车次数的大小还和延误、饱和度、道路通行能力、油耗、尾气排放等指标有着密切的关系。为提高车辆行车效率,节能减排,改善驾驶员的驾驶舒适度,本文将交叉口车辆平均延误,平均停车次数和通行能力三个评价指标作为优化目标,构建非线性模型,优化交叉口信号配时。
1.2 平均延误模型
本文选用的延误模型为Webster延误,如式(1)所示[10]。
(1)
式(1)中,λ为绿信比;y为实际交通量与饱和流量之比;x为饱和度;q为实际交通量。
根据Webster延误公式,第i相位每辆车的平均延误时间如式(2)所示。
(2)
一个周期内交叉口的车辆平均延误时间如式(3)所示。
(3)
1.3 平均停车次数模型
停车次数h是指车辆通过交叉口,由于信号控制导致停车的次数。第i相位车辆平均停车次数hi如式(4)所示[11]。
(4)
一个周期内交叉口的车辆平均停车次数如式(5)所示。
(5)
式(4)和式(5)中,gei为第i相位有效绿灯时间;C为信号周期;xij为第i相位第j进口道饱和度;qi为i相位交叉口实际交通流量。
1.4 车辆通行能力模型
单条车道的通行能力如式(6)所示[12]。
(6)
式(6)中,Qij为i相位第j车道通行能力;Sij为i相位第j车道饱和流量;gi为第i相位有效绿灯时长;C为信号周期。
交叉口通行能力Q为单条车道通行能力的和,如式(7)所示。
(7)
式(7)中,n为相位数,m为车道数。
1.5 目标函数模型
本文根据实际交通需求,将交叉口车辆平均停车延误,平均停车次数,通行能力作为优化目标,信号周期内各相位绿灯时间及周期时长作为约束,寻找目标函数的最小值。由于交叉口的交通状态是不断变化的,考虑到不同的交通流量,其交叉口平均车辆延误,平均停车次数和通行能力对交叉口综合效益的影响程度不同,所以引入a、b、c作为加权系数,由于要求的是目标函数的最小值,所以延误和停车次数应该越小越好,通行能力应该越大越好,故目标函数中取通行能力的倒数。考虑到3个目标的单位均不同,故对三者进行归一化处理,目标函数如式(8)所示。
(8)
式(8)中,f(x)为目标函数;L为总延误时间;C为信号总周期时长;gi为各相绿灯时长;gimax和gimin为各相绿灯时长的最大和最小值;Cmax和Cmin为信号灯一个周期时长的最大和最小值;a、b、c分别为优化目标延误,停车次数和通行能力的权重系数,D0、N0、H0为相应优化目标归一化的初始值。
2 单点信号交叉口配时优化
2.1 Webster配时优化算法
(1)饱和流量指一次连续时间内连续车辆通过交叉口进口道停车线的最大流量,即连续车队加速到正常行驶速度时,一定时间内通过进口道停车线的稳定车流量,用S表示,单位为pcu/h。饱和流量S如式(9)所示。
(9)
式(9)中,ht车头时距,一般为了安全,车头时距取2s以上。
(2)总损失时间L,如式(10)和式(11)所示[13]。
L=tR+4·tL
(10)
tL=ts+tb
(11)
式(10)和式(11)中,tR为全红时间;tL为损失时间;ts为汽车起动损失时间;tb为制动损失时间,取1s。本文不设全红时间。
(3)流量比yi和流量比之和Y,如式(12)和式(13)所示。
(12)
(13)
式(12)和式(13)中,yi为各相位交通流量比;q为实际交通量,单位为pcu/h;Y为所有相位关键车流的流量比之和。
(4)最佳周期C0如式(14)所示。
(14)
(5)有效绿灯时间Gei和gei,如式(15)和式(16)所示。
Gei=C0-L
(15)
(16)
式(15)和式(16)中,Gei为总有效绿灯时间;gei为各相位有效绿灯时间。
(6)各相位绿灯时间,如式(17)所示。
gi=gei+tL-ty
(17)
式(17)中,gi为第i相位的绿灯显示时间;ty为黄灯时长,一般取3s。
2.2 遗传算法
遗传算法是受自然界物种进化启发寻找全局最优解的算法。一般适用于求解比较复杂的多目标优化问题;通过适应度值评价搜索空间中的多个解,避免陷入局部最优;引入交叉算子和变异算子,能够自适应获取和指导优化的搜索方向。
遗传算法优化流程:
(1)确定遗传参数:种群规模、染色体长度、最大迭代次数、交叉概率、变异概率等。
(2)编码:选用实数编码,克服了二进制编码搜索空间急剧扩大,编码长度冗长以及寻优、收敛效率低下的问题。
(3)生成初始种群:随机产生M个个体的集合即为种群,本文初始种群数为50。
(4)计算适应度值:通过适应度函数计算种群中所有个体的适应度,评价个体优劣,选择适应度值较大的遗传至下一代,淘汰适应度值小的个体。适应度函数的选择对遗传算法的收敛速度及寻优效果会产生直接影响。
由于适应度函数非负,故目标函数不能简单的等于适应度函数,本文提出改进,如式(18)所示。
(18)
式(18)中,F(x)为改进后的适应度,f为传统适应度,α取值在(0,1)之间,fmin为当前迭代种群中个体适应度的最小值,fmax为当前迭代种群中个体适应度的最大值。当前迭代下|fmax-fmin|越小,F(x)取值范围越大,防止计算时在最优解附近摆动,提高收敛效率;反之F(x)取值范围越小,防止群体中存在过大个体误导算法搜索方向而陷入局部最优。
(5)选择:选用精英保留策略和轮盘赌选择将结合的方法,保留精英个体以免在遗传算法过程中被干扰。算法早期精英个体留存数较少,以防留存数过多产生早熟现象,算法后期逐量添加留存数目,让更多适应度高的个体直接留存至下一代,提高算法的收敛效率。轮盘赌选择中染色体在种群中被选中的概率如式(19)所示。
(19)
式(19)中,fi为个体i的适应度值,pi为个体i被选中的概率。
(6)交叉、变异:采用固定的交叉概率和变异概率难以保证群体的多样性和收敛效率,本文采用自适应交叉算子和变异算子。
自适应交叉概率pc如式(20)所示。
(20)
自适应变异概率pm如式(21)所示。
(21)
式(20)和式(21)中,famx为种群中最大适应度;fmin为种群中最小适应度;favg为种群适应度的均值;f′为交叉的两个个体中较大的适应度;f为变异个体适应度;a1,a2,a3,a4在(0,1)之间。
(7)终止条件:达到终止条件时算法结束,不满足终止条件时则返回步骤5。本文选择的终止条件为达到最大迭代次数N=100。
3 实例分析
选择淮南市区龙湖南路与朝阳中路交叉口作为研究对象,其中东、西、南、北进口道均为4车道且都是1条左转,2条直行,1条右转车道。朝阳中路为东西走向,龙湖南路为南北走向,自东向西和自西向东的进口道均设有左转待行区。由于该交叉口位于淮南市商业中心,周边有淮南商贸、淮南时代广场、新世界休闲生活广场、八佰伴、大金新百购物中心、龙湖中学以及多个小区,特别是在晚高峰人流量大,常发生交通拥堵现象。针对以上问题,本文采用人工观测法,选择晚高峰(pm5:30~pm6:30)1小时,实测交叉口交通数据,通过信号配时优化减少车辆延误和停车次数,提高交叉口通行能力。图1是使用SUMO软件绘制的交叉口平面示意图。交叉口由四个相位控制,信号配时如表1所示。

表1 信号配时

图1 交叉口平面示意图
经过实地观测,第一相位绿灯时间为30s,第二相位绿灯时间为28s,第三相位绿灯时间为37s,第四相位绿灯时间为33s,绿灯间隔时间为3s,交叉口一个周期的时长为40s。根据车辆折算系数(《城市道路设计规范(037CJJ-2012)》),将测得车流按照表2的折算系数折算成标准当量,高峰小时交通流量如表3所示。

表2 车辆折算系数
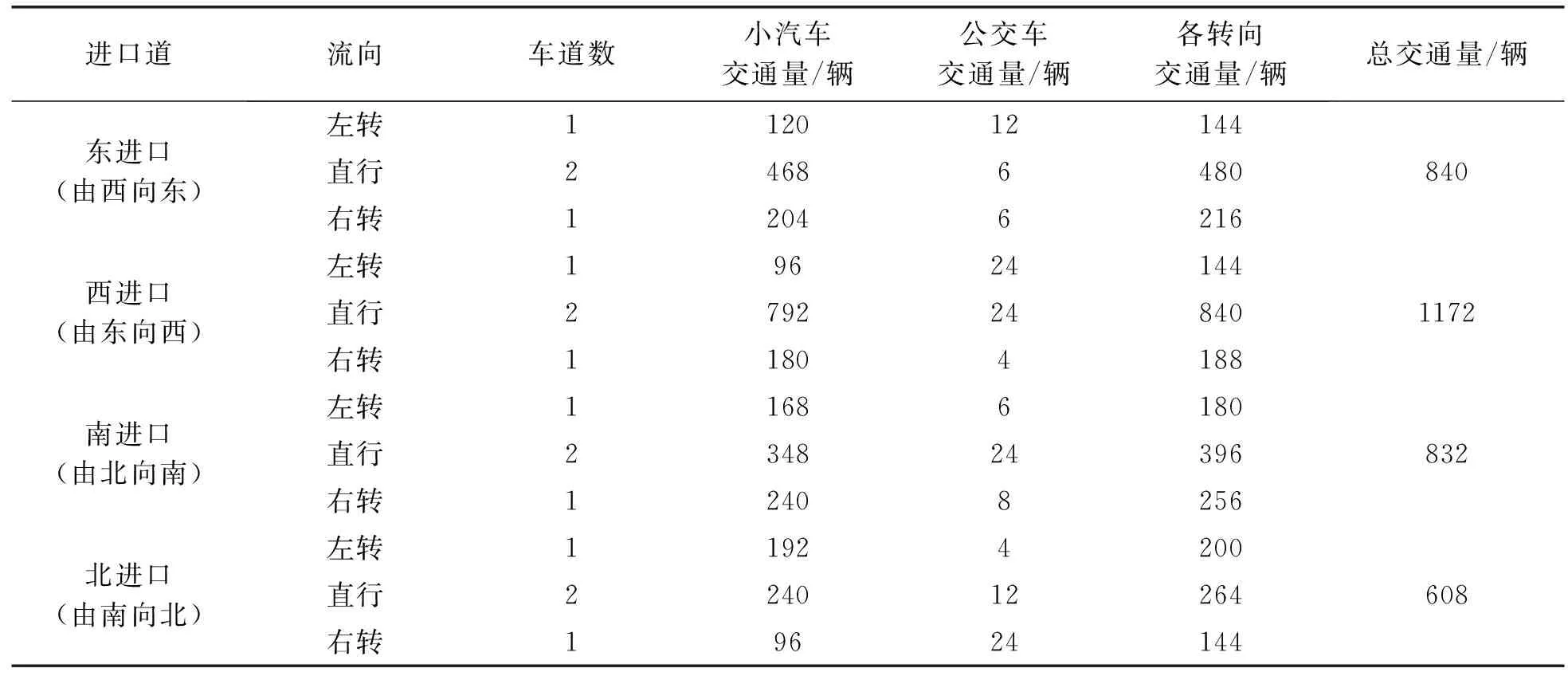
表3 交叉口高峰小时交通量
3.1 Webster配时优化
首先使用传统Webster配时优化,通过公式计算得出各相位有效绿灯时长和最佳周期,再利用实测的表3交叉口高峰小时表统计数据,使用SUMO软件仿真算出各评价指标的值。
3.2 遗传算法
遗传参数:群体规模=50,迭代次数=100,个体长度=4,总延误时间L=12s,约束条件如式(22)所示。Webster和遗传算法优化结果如表4所示。

表4 算法优化后的结果比较
(22)
从表4中可以看出遗传算法得出的结果优于传统Webster算法,且经过遗传算法优化后,交叉口周期时长由原有配时的140s减少到107s,下降了23.57%,平均延误时间由原先的52.48s减少到42.03s,下降了19.89%,平均停车次数由0.8629次/辆减少到0.7844次/辆,下降了9.1%,通行能力由4398.3pcu/h提高至4832.2pcu/h,比原有配时方案提高了9.86%。通过应用Matlab编程实现遗传算法迭代过程如图2所示。
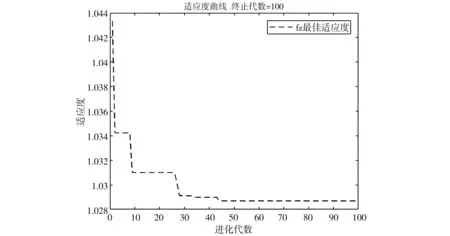
图2 遗传算法迭代过程
结语
本文分别研究了单点交叉口信号配时的Webster和多目标遗传算法配时优化,构造目标函数模型,以各相位绿灯信号时长和周期时长为约束,以平均延误、平均停车次数、通行能力为效益评价指标,通过现有配时方案、Webster算法、遗传算法三种方法计算的评价指标对比分析。研究表明,经遗传算法优化后的交叉口信号周期从140s变为107s,减少了23.57%,车辆平均延误时间从52.48s变为42.0371s,减少了19.89%,车辆平均停车次数从0.862次/辆变为0.7844次/辆,减少了9.1%,通行能力从4398.3pcu/h提高至4832.2pcu/h,提高了9.86%,能够有效减少停车延误及停车次数,缩短信号周期,比已有控制方案和传统Webster算法方案更好,使用遗传算法配时方案可以有效缓解城市交叉口交通拥堵问题。
猜你喜欢
计算机仿真(2022年8期)2022-09-28 09:53:02
作文周刊·小学一年级版(2020年40期)2020-10-19 04:42:20
重庆交通大学学报(自然科学版)(2017年3期)2017-05-17 03:37:32
娃娃乐园·3-7岁综合智能(2016年4期)2016-10-24 02:47:36
中国塑料(2016年11期)2016-04-16 05:26:02
中国房地产业(2016年2期)2016-03-01 01:25:37
系统工程学报(2015年3期)2015-02-28 19:54:01
河南科技(2014年14期)2014-02-27 14:12:02
教育与职业(2014年16期)2014-01-19 01:24:36
中国火炬(2010年5期)2010-07-25 07:48:00
