浅谈核固废钢桶自动取封盖装置设计思路
2024-01-10 10:08董绪超
科学技术创新 2024年2期
董绪超
(中国核电工程有限公司,北京)
引言
自动取封盖装置作为固废系统线的关键设备之一,本质上是在恶劣环境(有毒,放射性,高危险等)下,通过远程控制模式实现对核电低、中水平放射性固体废物包装容器钢桶的自动取盖和封盖操作的机械手[1],装置上的机械爪负责在上述过程中抓取,放开桶盖,要求定位精度高,紧固密封牢靠,抓取准确顺畅。该部件运转的流畅程度及可靠性对整条线的运行至关重要。
1 自动取封盖装置的主要功能
自动取封盖装置有三个主要的功能:第一,钢桶定位功能,对固废辊道系统输送至取封盖下方的钢桶起到一个定位及反馈信号通知辊道输送停止的作用。第二,螺栓/螺孔定位功能,钢桶定位后,需要拧松或拧紧螺栓进行取盖或封盖,在拧松、拧紧前需精准定位每个螺栓/螺孔,否则无法完成取封盖操作。第三,桶盖抓取功能,在取盖/封盖过程中将钢桶桶盖提起/放下,其可靠性是自动取封盖过程中安全性的保证。
2 钢桶定位功能
上述我国沿海某市核电站1、2 号机组自动取封盖装置中采用定位V 铁上的机械止挡进行钢桶定位,气缸驱动伸出到位,当钢桶到位后按压其上的机械止挡触发限位,给出桶到位信号,见图1。
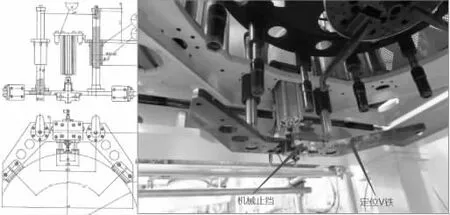
图1 我国沿海某市核电站1、2 号机组自动取封盖装置中钢桶定位方式
3、4 号机组自动取封盖装置中采用左、右定位轮臂(图2 中序号1)定位,气缸驱动轮臂伸出到位,当钢桶触发辊道上的两组光电开关(图2 中序号2)后,辊道停止运行,见图2。
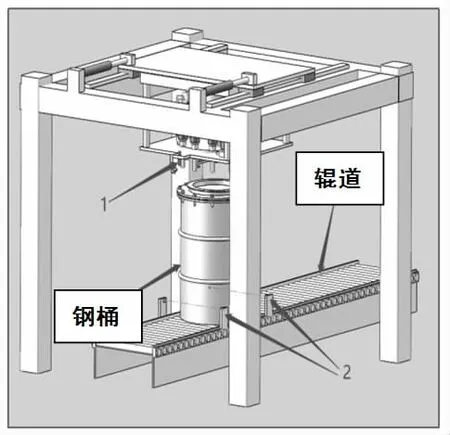
图2 我国沿海某市核电站3、4 号机组自动取封盖装置中钢桶定位方式
5、6 号机组自动取封盖装置依靠辊道上光电开关确定停靠点,这点与3、4 号机组自动取封盖装置一致;再通过安装在辊道上抱桶装置进行最终的定位和夹紧。
综上所述,1、2 号机组自动取封盖装置的定位V 铁所受的力为钢桶从辊道输送过来的横向力,而支撑力确是纵向的,且受力面积较小,长期接收装满固废的钢桶后,气缸的两个直线导杆容易产生变形,导致定位V 铁上、下滑动卡滞,钢桶定位不准确及钢桶信号消失等问题。而3、4 号机组自动取封盖装置在设计时考虑到上述定位V 铁的问题,对定位进行了改进,采用左、右定位轮臂及气缸支撑形式对钢桶进行定位,使定位支撑横向受力,增强定位的可靠性。5、6 号机组自动取封盖装置采用的是双光电开关定位,液压抱桶装置夹紧确认最终位置,但钢桶被抱桶装置夹紧后,钢桶位置唯一,遇到外形尺寸不规范的钢桶时,容易导致扳手套筒不能顺利的套住螺栓。建议解决思路为在主执行机构上增加无动力的自适应平台,用来冗余不规则钢桶的误差[2]。
3 螺栓/螺孔定位功能
上述我国沿海某市核电站1、2 号机组自动取封盖装置上的螺栓/螺孔定位装置整体安装在纵向下降气缸上,工作时通过电磁阀控制气缸,将螺栓/螺孔定位装置下降到检测高度;通过电磁阀控制横向气缸伸出,将螺栓/螺孔定位传感器移动至桶盖边缘上方;螺栓/螺孔定位传感器为2 个接近开关/2 个激光传感器,彼此间成固定角度和距离,与桶盖上相邻2 个螺栓/螺孔的角度、距离保持一致;旋转机构进行正转,当两个接近开关/激光传感器被相邻2 个螺栓/螺孔同时触发时停止转动,螺栓/螺孔定位完成,见图3。
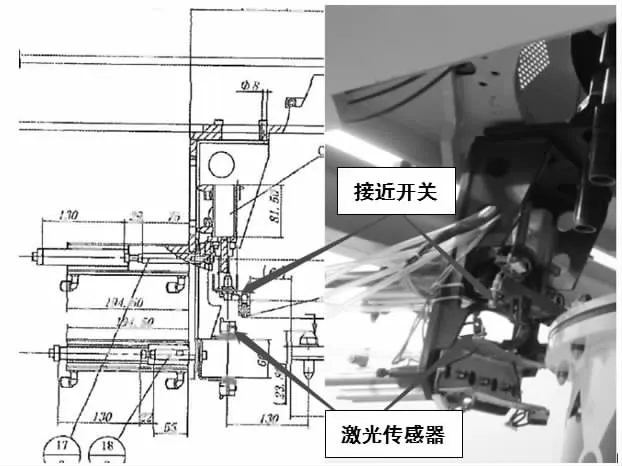
图3 我国沿海某市核电站1、2 号机组自动取封盖装置中螺栓/螺孔定位方式
3、4 号机组自动取封盖装置中的螺栓/螺孔定位激光传感器竖直安装在拧紧机主体框架上,和拧紧机的扳手头成一个固定角度;激光照射到螺孔内,但不是穿过螺孔;当钢桶就位后,伺服控制器控制旋转装置的伺服电机启动,拧紧机构开始旋转;螺栓/螺孔定位激光传感器依次照射到两个螺栓/螺孔后,产生两次信号的突变,此时程序判断已找到螺栓/螺孔位置;反向转动固定角度,使得扳手头和螺栓/螺孔对齐,即完成对螺栓/螺孔的定位,见图4。
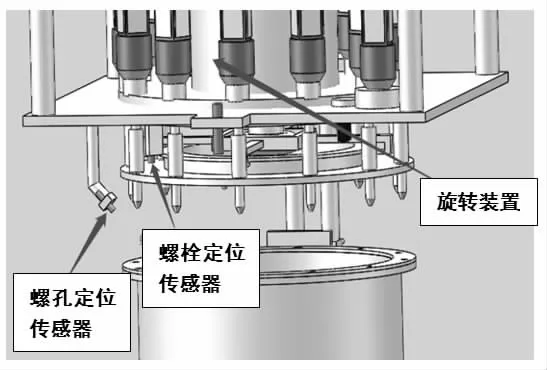
图4 我国沿海某市核电站3、4 号机组自动取封盖装置中螺栓/螺孔定位方式
5、6 号机组自动取封盖装置螺栓定位装置为一组固定在执行机构上的激光传感器,激光射点高度对应桶盖下方冒出的螺栓高度。定位螺栓时,螺栓定位装置随执行机构一起旋转,激光射点会先后经过相邻的2 个螺栓,触发两次信号。此时判断已找到螺栓。执行机构回转固定角度,使扳手套筒移动至螺栓的正上方。至此完成螺栓定位;螺孔定位装置由一个气动旋转臂和固定在上面的激光传感器组成。非工作状态时,旋转臂处于立起状态,不会与其他机构动作干涉。定位螺孔时,主执行机构首先下降至金属桶上方并保持一定距离。此时,控制旋转臂顺时针旋转180°,使得激光传感器的射点位置与螺栓孔处于同一圆心环内。执行机构旋转带动激光传感器连续经过两个相邻的螺栓孔,触发两次反馈信号,代表已找到相邻螺栓孔。主执行机构回转固定角度,使得扳手套筒处于螺栓孔的正上方[3]。旋转臂逆时针旋转180°,重复回到立起状态。之后可正常下降执行机构。
综上所述,1、2 号机组自动取封盖装置采用光电开关/激光传感器来对螺栓/螺孔进行定位,但是光电开关及激光传感器接收到螺栓/螺孔信号后反馈至系统,系统再发出旋转停止信号,中间有信号传输的时间差,这个误差无法控制,会导致执行机构下降后不能准确的找准螺栓/螺孔的位置。建议解决思路为将光电开关换成激光传感器,保证定位准确。采用伺服电机反转功能来消除信号传输的时间差;后续四个机组的自动取封盖装置从设计角度上规避了上述问题[4]。
4 桶盖抓取功能
上述我国沿海某市核电站1、2 号自动取封盖装置的桶盖抓取功能是通过电磁阀控制抓盖气缸旋转,四个抓爪向内收缩抓紧桶盖;电磁阀控制拧紧机主体气缸上升到位,完成取盖的操作;电磁阀控制抓盖气缸反向旋转,四个抓爪向外伸展松开桶盖;电磁阀控制拧紧机主体气缸上升到位,完成封盖的操作,见图5。
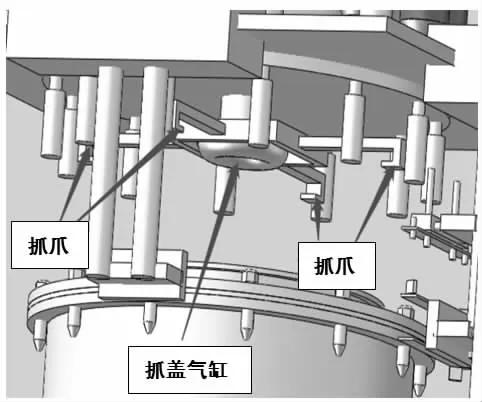
图5 我国沿海某市核电站1、2 号机组自动取封盖装置中桶盖抓取方式
3、4 号机组自动取封盖装置的桶盖抓取功能是通过电磁阀控制抓盖气缸缩回,三个抓爪向内收缩抓紧桶盖;升降机控制拧紧机主体气缸上升到位,完成取盖的操作。电磁阀控制抓盖气缸伸出,三个抓爪向外伸展松开桶盖;升降机拧紧机主体气缸上升到位,完成封盖的操作。
5、6 号机组自动取封盖装置在主执行机构上固定有3 组气动旋转抓具,见图6。当给出抓紧指令时,抓具向内旋转,托住金属桶桶盖的吊装环;当给出松脱指令时,抓具向外旋转,不再与金属桶桶盖吊装环接触。
图6 我国沿海某市核电站5、6 号机组自动取封盖装置中桶盖抓取方式
综上所述,1、2 号机组自动取封盖装置采用旋转气缸带动四根抓爪伸、缩来完成桶盖的抓取和释放,但在螺栓未完全拧松时取盖,容易将桶盖及钢桶同时提升,由于抓爪横向悬臂过长,容易造成抓爪机械性损伤。建议解决思路为增加拉力传感器,当主体机构提升力大于桶盖的重量时,工作停止并报警;而3、4 号机组自动取封盖装置采用的是竖直方向的摆动杆,当气缸收缩时抓紧桶盖,抓爪的受力截面理论计算可以承受载满重物的钢桶,不会发生变形或断裂问题,但是为了安全起见,取盖时顺带将钢桶提起是不可取的。建议解决思路同1、2 号机组一致;5、6 号机组自动取封盖装置采用3 组气动旋转抓具,出现钢桶随桶盖上升的情况后容易对气缸旋转轴及抱桶装置造成机械性损伤,会导致气缸旋转卡涩或失灵、抱桶装置定位不准确等问题。建议解决思路为增强螺栓拧松的检测,保证抓取时钢桶不会随桶盖上升。
5 改进的设计思路
通过上述三套自动取封盖装置的对比分析,基于自动取封盖装置三个主要功能,提出一些改进的设计思路如下:
在设计钢桶定位时,应考虑满载钢桶从辊道输送到位的力,定位止挡所受的力应大于满载钢桶输送力的1.5~2 倍,保证定位止挡的受力与载钢桶的输送力方向平行,适当增大接触面积。若采用光电开关辅助夹桶装置进行停止时,应选用精度高、性能好的光电开关,同时夹桶装置动力部分尽可能选用电动或气动,这样控制起来更方便,出现故障后更容易排查,夹紧装置应有远传手动控制,当发生故障时,检修人员可以在安全的地方控制夹紧装置打开,将钢桶输送至安全位置后,人员才能进入检修。
在设计螺栓/螺孔定位时,应考虑定位精度,检测开关的安装法兰上应带有自适应平台,保证遇到不规则的钢桶时能够无外力干预的情况下能够自动调整,增强定位的可靠性。定位时初次检测到的螺栓/螺孔不应作为基准点,应等旋转过一定角度后,通过私服电机反转来确认螺栓/螺孔的位置,这样会更加精确[5]。
在设计桶盖抓取功能时,首先应避免使用横向抓爪,横向抓爪悬臂梁较长,即使满足使用要求,尺寸也会很大,浪费成本及设备空间。其次应增加拉力传感器,可以保证桶盖与桶可以完全分离,增强设备的安全性。还要保证抓爪具有自锁性能,即使设备出现断电、断气的情况,桶盖也不会从抓爪上脱落。
结束语
近些年,国内核电站重启批复建设渐热,装机量也逐年提升,同时,随着时间推移,核电站更换燃料并贮存后,会有越来越多的低、中水平放射性固体废物产生,并需要通过钢桶转运。相应地,定位精度更高、操作更便捷、结构更为紧凑合理、安全性更高的低成本自动取封盖装置,将成为固废系统线迫切需求的设备。本文从桶定位、螺栓/螺孔定位以及抓取功能三个方面,总结分析了我国沿海某市核电站1-6 号机组中已实际应用的自动取封盖装置,提出了切实可行地解决问题的方法,形成了更为先进的自动取封盖装置推荐设计方案。也为后续进一步改进优化自动取封盖装置提供了一些切入点和思路。
猜你喜欢
科技创新与应用(2022年5期)2022-03-16
塑料包装(2021年5期)2021-11-16
轨道交通装备与技术(2021年4期)2021-09-16
数字制造科学(2020年1期)2020-07-15
蜜蜂杂志(2019年7期)2019-12-30
表面工程与再制造(2019年3期)2019-09-18
中国建筑金属结构(2018年4期)2018-05-23
科技创新与品牌(2016年8期)2016-09-29
船海工程(2013年6期)2013-03-11