智能辅助行走器结构和控制研究*
2024-01-09 05:08徐亚芬喻凌峰马国栋李媛媛罗柠锋
机电工程技术 2023年12期
徐亚芬,张 华,喻凌峰,马国栋,李媛媛,罗柠锋
(广东科技学院机电工程学院,广东东莞 523083)
0 引言
中国残疾人联合会发布的数据显示,目前我国残疾人总人数超过8 500 万,其中肢体残疾人数近2 500 万,2021 年期间得到康复服务的持证残疾人中肢体残疾人数为407万[1]。我国残疾人康复需求主要表现为医疗服务与救助、辅助器具、康复训练与服务和贫困残疾人救助[2]。由于这些患者在进行康复训练时存在需要医护人员辅助、占用他人时间、耗费他人体力等问题,急需一款智能康复行走器解决以上痛点。
目前辅助行走的主要方式为外骨骼辅助行走方式和轮椅代步方式[3]。2019年5月西班牙马德里Technaid公司推出新版本的可穿戴下肢外骨骼机器人Exo-H3,它可以通过存储有关实验的步态数据模拟人类的行走,帮助下肢功能不便的患者,开展帮助行走和康复训练[4],但是这种机器人需要定制,通用性差,成本高。轮椅代步方式成本较低,在市场上较为通用,但不够智能,对下肢恢复有一定的影响[5],由于久坐不利于下肢的康复,易形成下肢静脉血栓,出现下肢无力、疼痛和麻木等症状[6]。
本文针对现有市场上辅助行走装置存在的问题,设计一种能够安全独立操作,可在康复训练和休息及代步之间进行转换的智能辅助行走器,满足患者在康复训练过程中可随时根据自己意愿进行休息或代步的需求,有助于提高患者训练的信心,帮助患者更加有效地进行下肢康复训练,达到预期的康复训练效果。
1 总体结构和功能
智能辅助行走器的总体结构由训练模块、座椅折叠模块、移动模块3个模块组成。
智能辅助训练行走器可承受人体最大质量100 kg,其机械结构如图1 所示。图1 显示的是行走训练时的形态,代步或休息时的形态如图2 所示。智能辅助行走器共有3 个直流电机、4 个伺服电机提供动力,其中2 个直流电机用于驱动智能辅助行走器的移动,另一个直流电机用于座椅升降模块的驱动,其中2个伺服电机用于驱动升降电机模组,另外2 个伺服电机用于训练摆杆的驱动。在2 个宽度调节扶手处分别布置了压力传感器,用于反馈信号。
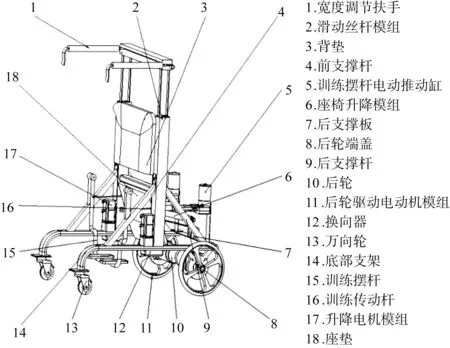
图1 行走训练时机械结构的形态
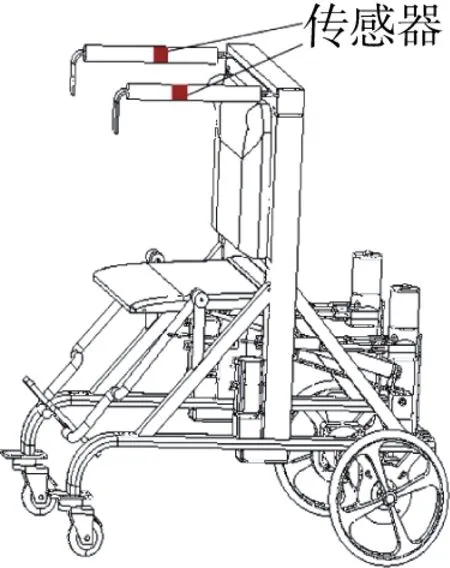
图2 代步或休息时机械结构的形态
1.1 训练模块
该模块由直流电机、换向器、滑动丝杆模组、宽度调节扶手和训练摆杆组成。滑动丝杆模组由滑动丝杆、直线导轨、铝合金型材、滑座、联轴器、光电开关等组成。腋下的宽度调节模块由宽度调节扶手和与其相连的滑轨等组成。宽度调节扶手可根据每个人不同的宽度进行调节,同时能够起到支撑作用。
当患者两侧腋下开始发力夹紧,位于宽度调节扶手左右两端的DYMH-102 膜盒式荷重压力传感器产生信号。智能控制系统启动电机,通过滑动丝杆模组传动,驱动患者腋下的扶手向上移动,从而托举患者,帮助患者慢慢站起,同时座椅开始折叠。当患者被托举达到所需的高度时,训练摆杆刚好达到最低点[7]。然后通过扶手处传感器控制启动,由训练模块开始带动患者的双腿在原地进行慢慢摆动训练,这样可以缓解使用人员长时间受到压迫的背部肌肉群和臀部肌肉群,同时可以活动腿部和脚部的关节和肌肉,能够进行安全且放松式的训练。
当患者恢复一定行动能力时,可以不使用训练摆杆,直接落地步行锻炼,腋下扶手可提供一定的托举力以减少患者腿部的支撑力量,防止二次伤害。
1.2 座椅折叠模块
该模块由座椅升降模组中的电动缸提供动力,通过连杆机构传动使座垫展开或折叠。座椅展开与折叠情况分别如图1与图2所示。
当患者处于坐姿并准备站起训练时,后面的电动缸收缩、座垫折叠;当患者处于训练并准备坐下时,后面的电动缸伸出、座垫展开,以达到空间的最大化利用。
1.3 移动模块
该模块是由后轮驱动电机模组、传动轴以及轴承等组成。后轮驱动电机模组由直流电机和减速器组成。
减速器将电机的转矩和速度进行转换,达到一个合适的力矩和转速,减速器输出轴通过联轴器与后轮相连,以达到驱动的效果。转向时,左右两电机进行差速运动即可实现转向。
该智能辅助行走器的功能流程如图3所示。

图3 功能流程
2 主要电机选型计算
2.1 移动模块驱动电机
考虑到智能辅助行走器维修难度及成本等多方面客观原因,有以下2种方案。
方案一:后轮转向式。如图4所示,在2个后轮上利用电机的差速进行转弯,前面的2 个轮子用万向轮进行转向辅助。
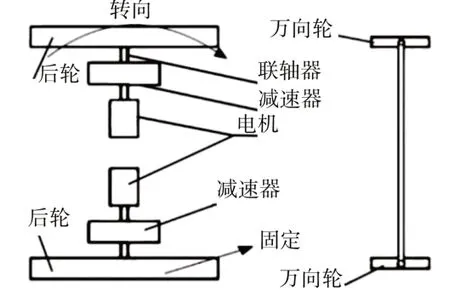
图4 后轮转向式
方案二:前轮转向式。如图5所示,在2个后轮进行连轴传动,用电机驱动前轮进行转向。

图5 前轮转向式
2 种方案的优缺点:方案一的驱动结构比较简单,但需要克服直接驱动轮子的一系列问题,如电机转速过高等问题,侧重点在电器控制上的设计;方案二结构上较为复杂,需要添加较多的传动机构,但在电器控制上较为简单,不符合功能设计。
综合考虑电机性能、占用空间、质量、成本等因素,最终确定为方案一,即采用后轮转向式,由2个直流电机驱动。
电机经减速器降速后,将旋转运动和转矩(即驱动力矩)传递给后轮,当后轮的驱动力矩大于阻力矩时,智能辅助行走器加速行驶;当后轮的驱动力矩小于阻力矩时,智能辅助行走器减速行驶。当智能辅助行走器匀速行驶时,驱动力矩与阻力矩平衡,则有:
式中:Tt为2 个直流电机输出转矩;ηT为机械传递效率;r为后轮半径;m为整车质量;f为滚动摩擦因数;ua为车速;α为上坡坡度;CD为空阻系数;A为车辆迎风面积;δ为智能辅助行走器质量换算系数。
患者使用智能辅助行走器的路况应为平坦路面,空气阻力和爬坡阻力较小,相对地面摩擦阻力可忽略不计。所以,当智能辅助行走器匀速行驶时,总阻力约等于地面摩擦阻力。
智能辅助行走器用于代步时的行驶速度设计为5~15 km/h,所需的电机输出转速可由以下公式计算得出。
式中:v1为智能辅助行走器匀速行驶速度;w1为电机输出转速;i1为减速器减速比。
2.1.1 匀速直行时所需参数
根据上述智能辅助行走器车身骨架设计,估测智能辅助行走器空载质量约为m车=50~60 kg;智能辅助行走器需能承载最大质量m人=100 kg。所以,智能辅助行走器承载时最大质量M总约为150 kg。
智能辅助行走器行驶在普通路面上时,摩擦力为轮胎与地面的滚动摩擦力,摩擦因数为0.010~0.020,取最大值0.020。可计算地面摩擦阻力Ff为:
辅助行走器的后轮半径设为0.15 m,外加齿轮箱减速比i1=10。考虑功率传递损耗,取功率传递效率ηT=0.9。
根据公式(1)得单个电动机所需转矩为:
设智能辅助行走器平均行驶速度为12 km/h,即v=3.33 m/s,所需后轮驱动电机的平均转速应为:
智能辅助行走器匀速直行时功率为:
确定各部分效率:联轴器效率(1 对)η1=0.99,滚动轴承传动效率(1 对)η2=0.98,闭式齿轮传动效率(1对)η3=0.96。
传动装置的总效率为:
所需电动机功率为:
采用后轮驱动转向的结构,需2 个电机差速转向,故单侧电机的功率等于总功率的1/2,则有:
综上,为使智能辅助行走器在负载为100 kg 且匀速直行时行驶速度能达到15 km/h,所需单个电机扭矩为0.245 N·m,转速为1330 r/min,功率为0.052 kW。
2.1.2 转向时所需参数
当转向时,智能行走辅助器一侧的后轮不动,另一侧后轮工作,由2 个后轮提供动力变成单个动力,但是单个电机的负载也下降为原来的1/2。移动模块结构如图6所示。

图6 移动模块结构
由于智能辅助行走器载荷总质量约为150 kg,在作转向运动时一个轮子固定不动,另一个轮子提供动力进行转向,转向轮做功只需克服单边所受的摩擦力,设单边轮所受的重力为:
则单边所受的摩擦力为:
辅助行走器的后轮半径设为0.15 m,减速器减速比i1=10,取功率传递效率为0.9。
由式(1)得单个电动机所需的转矩为:
设2个后轮之间的距离约为1 m,其中一个后轮固定不动,另一个后轮的转向速度为2π rad/s,圆周速度v=2πr=2 m/s。
电机所需的转速:
电机功率为:
综上,智能辅助行走器在转向时为保证后轮的转向速度为2π rad/s,所需电机的参数:转矩为0.125 N·m,转速为1273 r/min,功率为0.033 kW。
2.1.3 加减速时所需扭矩
由SolidWorks三维建模[8]得联轴器转动惯量J1=3.3×10-7kg·m2,轴转动惯量J2=1.316×10-6kg·m2,后轮转动惯量J3=7 892×10-6kg·m2。
将智能辅助行走器的移动惯量转换为转动惯量:
智能辅助行走器移动总的转动惯量:
设加速时间t=10 s,则电机加速度为:
根据角加速度与惯量之间的关系[9]可得加速扭矩为:
总扭矩为:
综上,受到物体惯量的影响,该智能辅助行走器若在10 s 内加速至最大速度,需要提供的加速扭矩为0.062 5 N·m,故此电机所需的扭矩应大于0.31 N·m。
综合各种使用情况下所需的电机参数,扭矩应大于0.31 N·m,转速应大于1 330 r/min,功率应大于55 W,最终确定移动模块的2 个驱动电机均选用上海某公司生产的GC5 系列直流电机,型号DC5GU90-N-24-20s,具体参数如下:额定电压为24 V;负载转矩为0.378 N·m;负载转速为1 590 r/min;额定功率为90 W;质量为2.2 kg。
2.2 滑动丝杆模组驱动电机
2.2.1 自锁性验算
升降驱动电机产生扭矩,驱动丝杆旋转,从而将电机轴的旋转运动转换为丝杆螺母的直线运动。因为需要丝杆的自锁属性,故丝杆选用梯形螺纹。梯形螺纹的牙型角a=30°,固定方式为固定-固定结构。
确定梯形丝杆的公称直径D=30 mm,导程P=10 mm,行程为1 200 mm,精度为C7级。
滑动丝杆的自锁条件[10]为螺旋升角小于当量摩擦角p,梯形螺纹的当量摩擦角为5°5′,螺旋升角λ为:
因为λ<p,所以该丝杆具有自锁性。
2.2.2 驱动电机选型计算
假设此智能辅助行走器承载的患者的重力完全作用在扶手上且同时升降,即患者的重力G人=1000 N,作用于丝杆的轴向力为1 000 N,电机产生的扭矩需要能使丝杆产生向上大于1 000 N的力。
智能辅助行走器需要升降位移约1.2 m,假设升降的最大速度v3=50 mm/s=3 m/min。加减速时间为1 s,则最大加速度=0.05 m/s2。
丝杆产生的轴向推力用于克服导向块的摩擦力和患者作用在丝杆上的力。
导向块的摩擦力计算公式为:
导向块润滑方式为油液润滑,查机械设计手册[10]摩擦因数u=0.25。
则摩擦力为:
丝杆需要输出推力大小为:
因为需要升降的质量包括患者在内一共为150 kg,则产生加速度所需的力:
所以总推力为:
转换成相应的扭矩为:
式中:T为丝杆输入转矩;F为丝杆进给力;P为丝杆导程;η为丝杆效率。
启动转矩相对于负载转矩差距过小,故忽略不计。丝杆的导程为10 mm,最大升降速度为3 m/min,则丝杆的旋转速度n3=300 r/min。
故需要输入的扭矩为5 N·m,输入转速为300 r/min。丝杆输出功率为:
考虑到轴承、丝杆及其他效率损耗,给予安全系数为2。
选择电机加减速器的形式增大输出转矩,选择减速器传动比i2=10。
则所需要的驱动电机转速:
扭矩为:
滑动丝杆模组采用双侧电机驱动,所需电机扭矩为0.25 N·m。
综上所述,确定滑动丝杆模组选用的2 个伺服电机及2 个减速器型号如下:减速器为浙江某公司的60JB 平行减速器,减速比为1∶10;伺服电机为广州某公司的ASHM60L 无刷伺服电机,输入电压为DC24/48 V,功率为100 W,额定转速为3 000 r/min,额定扭矩为0.33 N·m。
3 座椅升降模组传动机构设计
座椅折叠结构主要由1个电动推缸、连杆机构和1个座椅组成。如图7~8 所示,连杆机构是平面四杆机构,有3个转动副,1个滑动副。根据该智能辅助行走器的尺寸规格,各杆的长度(mm)及角度如图7所示。

图7 折叠状态
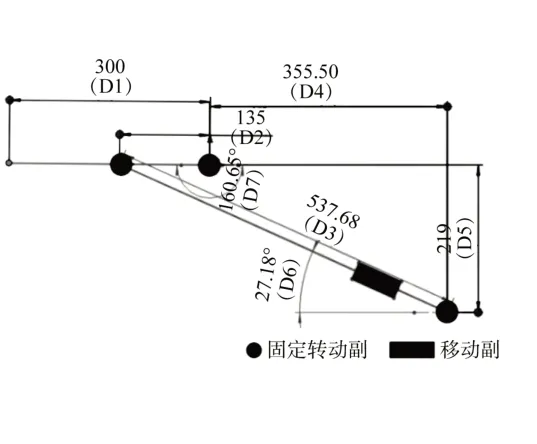
图8 工作状态
自由度F=3n-2PL-Ph=1,故该连杆机构具有确定的运动[11]。
由SolidWorks 三维设计得运动前后的数据如表1~2所示。

表1 移动副长度变化 mm

表2 转动副角度变化(°)
根据上述数据得出,该智能辅助行走器电动推缸的行程应为230 mm。
4 智能控制系统设计
为满足患者需求和应对突发情况,本设计使用了以STM32 芯片为核心的具有多种功能的系统。STM32 系列产品基于超低功耗的ARM Cortex-M0 处理器内核,整合增强的技术和功能,瞄准的是超低成本预算的应用[12]。
该系列微控制器缩短了采用8 位和16 位微控制器的设备与采用32位微控制器的设备之间的性能差距,能够在经济型用户终端产品上实现先进且复杂的功能[12]。智能控制系统包含紧急呼救、伸缩座椅和扶手调整的按键实现功能。传感器模块用于产生信号,并输出信号给STM32F103 芯片来实现控制电机或蓝牙动作。智能控制的实现如图9所示。
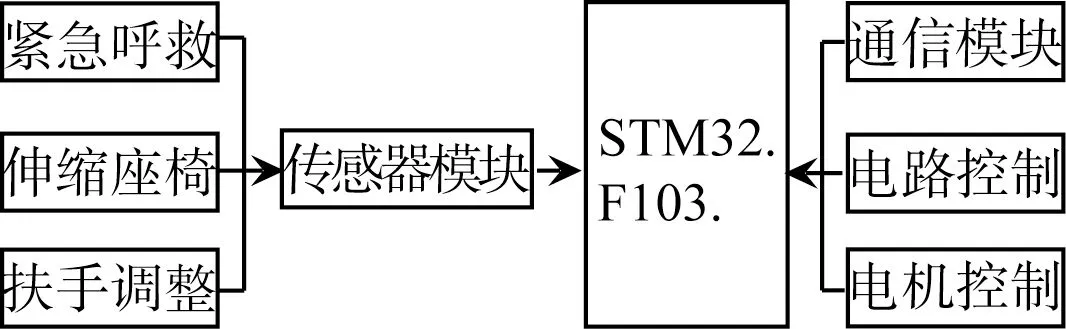
图9 智能控制的实现
4.1 传感器模块
紧急呼救部分使用一个紧急按钮连接到STM32 芯片的一个GPIO口上,当按钮按下时触发传感器模块中的压力传感器,GPIO 口会检测到高电平信号,STM32芯片会通过中断程序进行处理[4]。在中断程序中,可以根据患者的具体需求执行一系列紧急处理程序,如触发一个警报、向指定号码发送短信或拨打电话等。
通信模块使用无线通信蓝牙模块,一个相应的接口将通信模块连接到STM32芯片,STM32芯片使用其中一个接口连接通信模块。编写一个发送函数和一个接收函数,分别用于将数据发送到通信模块和从通信模块接收数据。
当智能辅助行走器处于代步功能移动时,采用超声波传感器监测周围障碍物[13]。超声波模块的基础是超声波测距,本设计使用的测距模块是单发双接收发超声波装置,定位装置由发射超声波模块、接收超声波模块和供电电路组成。发射超声波模块将VCC和GND接入系统电源即可发送出6 个50 Hz 的方波信号,再利用2 个接收模块接收方波信号,通过声音信号引脚S和光信号引脚L即可将信号传送给单片机处理,从而更精准地判断使用者的距离,提高辅助行走器的安全性,保护使用者的安全[14]。
4.2 传感器握力刹车功能
在智能辅助行走器操作过程中,需要通过传感器获取多元的环境信息[15]。智能辅助行走器采用陀螺仪传感器和压力传感器来测量行走器的重心位置和压力分布,用于控制行走器的平衡和步态控制。
设患者的握力大约为0~300 N,通过在智能康复训练行走器的扶手上增加DYMH-102 膜盒式荷重压力传感器计算患者在训练时抓住扶手的力。当患者由于遇到突发情况而紧张使握住扶手的压力增大到规定的数值时,压力传感器发出反馈信号,系统会智能地发出指令使电机安全减速。
智能辅助行走器采用加速度传感器测量加速度,实时监测速度,通过患者的恢复情况设定该行走器的安全速度值,实现稳步安全的训练[16]。
握力刹车系统压力传感器分布如图10 所示。握力检测刹车功能由安装在宽度调节扶手左右端的DYMH-102 膜盒式荷重压力传感器、STM32F103 芯片和连接刹车的制动异步电动机实现。
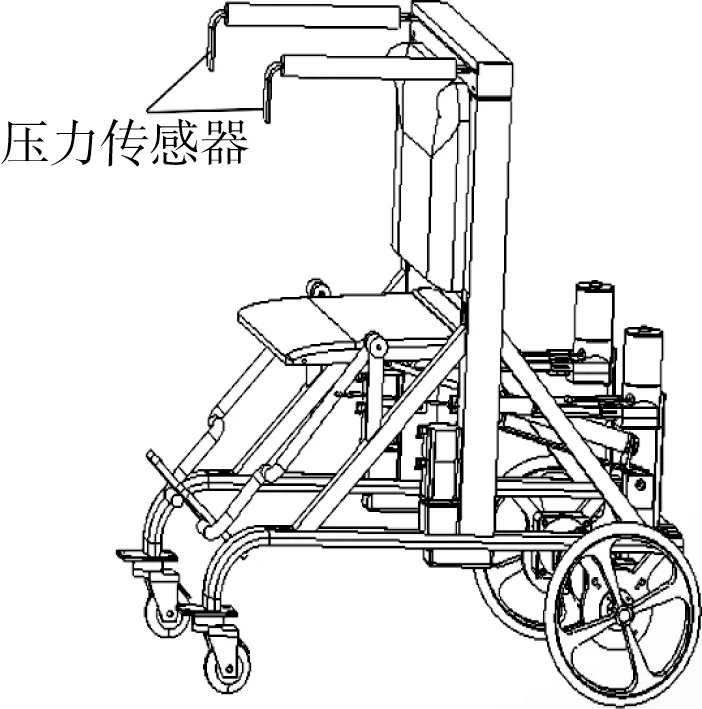
图10 握力刹车系统压力传感器分布
压力传感器实时检测患者的握力,当遇到紧急情况时,如速度过快或者下坡由于慌张忘记制动时,患者的第一反应是紧握扶手,此时由于超过压力传感器设置的压力值,传感器发出信号到STM32F103 芯片处理输出高脉冲信号给伺服电机,伺服电机收到信号使得智能辅助行走器及时刹车,保障患者安全。握力刹车控制流程如图11所示。

图11 握力刹车控制流程
5 测试验证与结果分析
5.1 扶手仿真分析
扶手除需要支撑患者所施加的重力外,还需承受患者在训练过程中因冲击产生的握力,这些力的大小往往具有不确定性,且作用次数频繁,易使扶手产生疲劳破坏。参考不同年龄段的人手部握力变化趋势的相关数据,得出在20~70岁年龄段的人握力为320~450 N[17],取患者由于冲击产生的握力为450 N,患者的质量为100 kg,则可得作用在扶手上的力为1 450 N。
采用SolidWorks Simulation 进行有限元分析[18],将1 450 N 的力施加在扶手零件上,并将扶手与扶手移动装置的连接处看成刚体去研究。选取304 不锈钢作为测试材料[19],生成扶手处应力和变形如图12~13 所示。由图可知,采用304 不锈钢作为扶手的材质能够承受来自患者施加的力,虽然在扶手连接处有较大的应力集中,最大应力为1.6×105N/m2,但是远小于不锈钢材料的屈服载荷2.1×108N/m2,不会对智能辅助行走器的安全性能造成影响,且变形小、安全系数高。

图12 扶手应力图
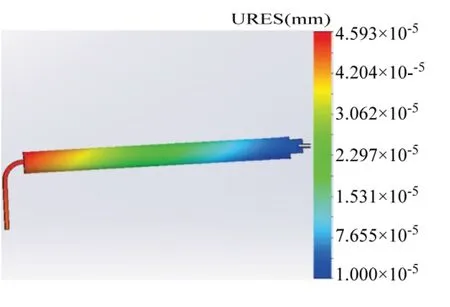
图13 扶手变形图
5.2 座椅仿真分析
座椅是智能辅助行走器的重要支撑装置,为保证患者的安全性,将实验余量放大50%,即患者的体重和随身物品加起来的质量大约为125 kg,实验取180 kg。座椅也采用304 不锈钢材质,座椅应力和变形如图14~15所示。由图14 可知,采用304 不锈钢材料的座椅也能承受实验质量,并在连接处有较大的应力集中,但都远小于屈服载荷。由图15可知,座椅的变形量微小,不会对智能辅助行走器使用安全造成影响。
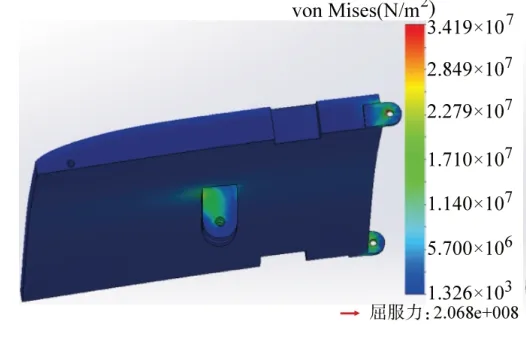
图14 座椅应力图

图15 座椅变形图
6 结束语
本文针对下肢康复训练中存在的问题进行了分析,通过SolidWorks 软件设计了一款在康复训练与休息、代步之间可以相互转换的智能辅助行走器。进行了电机的选型、机械结构的设计、智能控制系统的设计,并对扶手和座垫进行了有限元分析。智能辅助行走器的控制模块是实现康复训练的关键,通过控制器、传感器、数据采集模块和数据分析模块的有机组合,可以实现对行走器的控制和监测。根据传感器反馈的信息,可以智能调节智能辅助行走器的扶手高度和训练摆杆的角度,如根据身高确定扶手的高度等,以使患者得到最好的使用感受,提高康复效果,实现了安全性、可操作性等多功能需求。
猜你喜欢
养生月刊(2022年5期)2022-11-26
橡塑技术与装备(2022年10期)2022-10-03
现代临床医学(2022年5期)2022-09-28
汽车维护与修理(2022年5期)2022-09-06
有色金属材料与工程(2021年4期)2021-11-27
橡塑技术与装备(2021年2期)2021-02-01
小学生学习指导·爆笑校园(2019年6期)2019-09-10
家庭医药·快乐养生(2019年2期)2019-03-04
文体用品与科技(2016年5期)2016-04-08
红蜻蜓·低年级(2015年11期)2016-02-02