
基于视觉感知的V2V毫米波波束对准技术*
2024-01-06 12:50韩昀达陈舒怡叶亮
移动通信 2023年12期
韩昀达,陈舒怡,叶亮
(哈尔滨工业大学电子与信息工程学院,黑龙江 哈尔滨 150000)
0 引言
车-车(V2V,Vehicle-to-Vehicle)通信通过车辆之间的信息传递,可以有效避免交通事故的发生,是提高道路交通安全的关键技术,在自动驾驶和智能交通领域应用广泛[1]。随着车联网技术的迅猛发展,智能网联汽车数量逐年增长,通信业务量将显著增加,也对网络带宽和网络时延提出了更高的要求[1-2]。
毫米波具有30~300 GHz 的广阔频谱,可以缓解传统通信系统中的频谱拥塞问题,为V2V 通信提供更高速率传输支撑[3-4],但V2V 毫米波通信系统在波束对准问题上面临着亟需解决的关键性问题:毫米波信号频率较高,传播中路径损耗大,且传播依赖于直射路径,容易受到人体、树叶及建筑物等物体遮挡的影响,引起巨大的信号衰减[5]。通常使用大规模天线阵列技术,形成狭窄的高增益波束以补偿毫米波信号在传输中的快速衰减[6]。但是,由于车辆移动性较强,窄波束难以实时对齐,给系统的设计带来了困难[7]。
传统的波束对准方法包括用特定的码本进行波束搜索[8-10]以最大化接收信噪比,或者直接根据估计的信道矩阵计算波束成形矩阵[11-14]。然而,这种方法运算量大,将导致大量的时延和频谱开销。文献[15] 提出了一种分层多波束搜索方案,该方案通过预先设计相应的模拟分层码本完成波束对准,在一定程度上降低了波束搜索的时延和开销,但在V2V 通信中,较高的目标移动性导致此搜索方法的实施面临较大困难。
针对这些问题,文献[16] 提出,来自传感器的有效带外信息可以指示通信环境空间特征,利用从传感器获得的有效带外信息进行波束搜索可以显著减小波束搜索开销。文献[17] 提出了一种雷达辅助的毫米波波束预测方案,但雷达的检测精度不如激光雷达和相机。文献[18-19]提出了一种基于移动用户视觉辅助的波束对准方案,该方案使用在移动用户处拍摄场景图像,利用3D 对象检测技术提取周围车辆位置信息,并利用深度神经网络推断基站与用户间的最优波束对,具有较高的波束对准精度。但该方案只考虑了移动用户与路侧基站之间的波束对准,没有考虑V2V 通信场景下的波束对准。文献[20] 展示了用于毫米波通信的立体相机和激光雷达辅助的波束跟踪平台,以每秒12 帧的速率执行波束跟踪。但该方案需要的立体相机和激光雷达价格昂贵,难以普遍使用。
因此,本文提出一种基于视觉感知的V2V 毫米波波束对准方案。本方案使用车载单目相机拍摄场景图像,采用视觉感知技术,对场景中的车辆目标进行三维位置估计,经坐标变换获得目标方位角和距本车体的距离,并生成波束成形矢量实现车辆间的波束对准,以降低波束对准开销。由于只需要用到单目相机,因此本方案在完成相对精确的波束对准的同时具有硬件开销低的优势。
1 系统模型
1.1 场景模型
本文考虑的通信场景为城市道路上的V2V 毫米波通信,波束对准场景如图1 所示。假设车辆沿行车道行驶,行驶方向与行车道右侧方向平行,假设在车辆顶部安装有单目相机传感器、接收天线和发射天线。通过目标检测算法对车载相机传感器采集的场景图像进行检测,可以获取场景中其他车辆的3D 位置信息,经过坐标等计算变获得车辆目标相对与本车体的方位角和距离,生成对应方向的波束成形向量,完成对于车辆目标的波束对准。
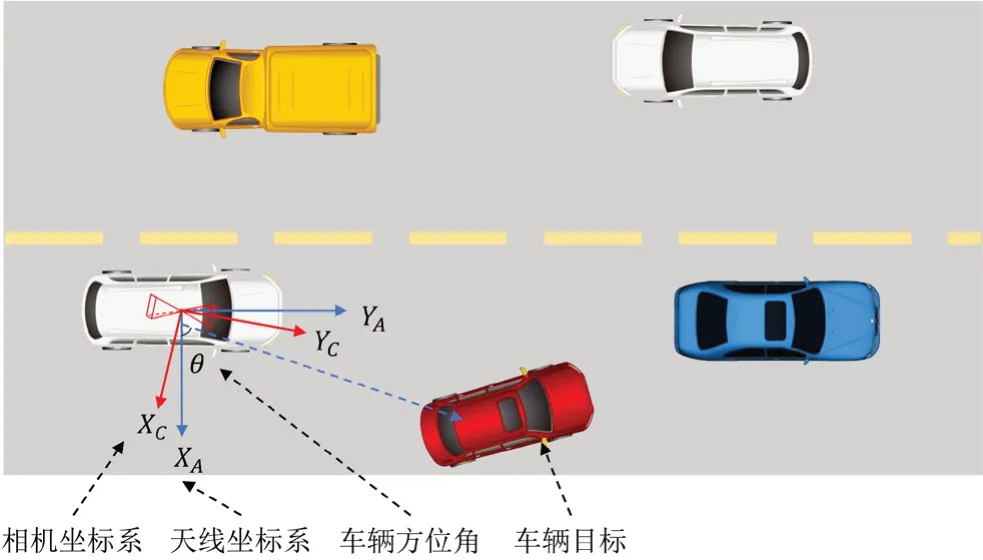
图1 V2V通信波束对准场景
1.2 信道模型
由于毫米波信道的稀疏特性以及有限散射性,瑞利衰落信道在毫米波频段并不适用,本文采用毫米波几何信道模型(S-V,Saleh-Valenzuela)。假设系统中接收端和发射端均采用均匀直线阵列天线,第p个子载波的频域信道如式(1) 所示:
2 基于视觉感知的V2V波束对准
本文首先采用全卷积单阶段单目3D 目标检测(FCOS3D,Fully Convolutional One-Stage Monocular 3D Object Detection)算法对场景中的车辆目标进行三维位置估计,然后通过坐标变换,得到车辆目标的方位角和到车体的距离,最后利用车辆目标的方位角和距离信息生成波束成形矢量。本节以发射端为例,对本文的研究方法进行阐述。
2.1 基于FCOS3D算法的目标三维位置估计
本文采用了FCOS3D 三维目标检测算法处理单目相机传感器采集的场景图像,完成对于场景中其他车辆的三维位置感知任务。
FCOS3D 算法是基于FCOS 目标检测算法做了调整和优化的单目三维目标检测算法[21]。该算法在无锚点的FCOS 二维目标检测算法的基础上增加额外的分量来预测目标的三维属性。
如图2 所示,该算法首先将定义的7 自由度回归目标转换为2.5D 中心和3D 大小。2.5D 中心可以很容易地通过相机固有矩阵转换回3D 空间。对2.5D 中心进行回归可以进一步简化为对从中心到特定前景点的偏移量Δx、Δy及其相应深度d进行回归。此外,为了预测物体的异中心方位,该算法将其分为两部分:周期为π 的角度θ回归问题和方向的二分类问题。FCOS3D 算法用基于中心的范式对三维目标进行变换,预测出检测目标的深度、3D 大小和方向等三维位置信息,避免了任何必要的2D检测或2D-3D 对应先验。

图2 FCOS3D算法投影中心点示意图
2.2 波束对准
本文对FCOS3D 算法估计的车辆目标的三维位置进行坐标变换,得到车辆目标的方位角和到本车体的距离,最后利用车辆目标的方位角和距离信息生成波束成形矢量。因此对本文中使用的坐标系和坐标变换关系进行说明,坐标系变换关系见图3。
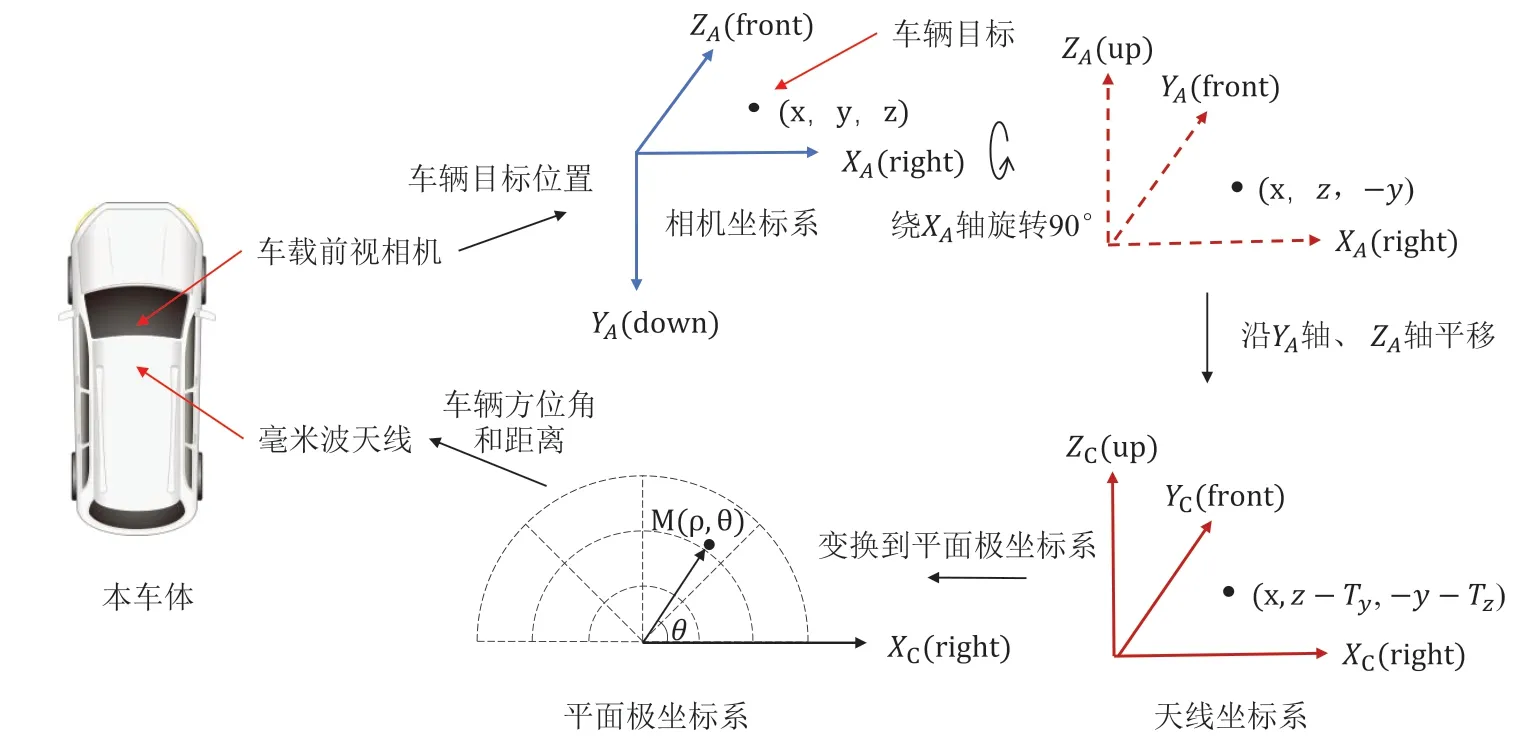
图3 坐标系变换关系示意图
(1)相机坐标系
相机坐标系以车载相机光轴为z轴、x轴和y轴平行于图像坐标系的x轴与y轴。其中,y轴平行于重力轴,z轴坐标值代表了目标的深度信息。
(2)天线坐标系
天线坐标系以车体前端ULA 天线中点为坐标原点,x轴平行于相机坐标系x轴,y轴平行于相机坐标系z轴,z轴向上平行于相机坐标系y轴。
(3)平面极坐标系
平面极坐标系在天线坐标系内xoy平面上,以原点为极坐标极点,以x轴为极轴。假设车体ULA 天线及车载相机位置示意图如图3 所示,ULA 天线及车载相机都位于车辆中线上。FCOS3D 算法的检测结果是车辆目标在相机坐标系下的三维位置坐标,因此需要进行坐标变换得到车辆目标的方位角和距车体的距离,变换过程如下:
(1)相机坐标系变换到天线坐标系
将相机坐标系绕x轴旋转90°,然后沿y轴正方向平移Tym,沿z 轴正方向平移Tzm即可得到天线坐标系。设目标在相机坐标系中的坐标为(x,y,z),令经过旋转和平移,从相机坐标系变换到天线坐标系的变换公式如下:
(2)车载ULA 天线坐标系变换到平面极坐标系
由于V2V 通信场景中,车体与场景中其他车辆高度近似相等,因此可忽略波束的俯仰角,只考虑波束在二维极坐标系中的情况。根据极坐标计算公式:
3 仿真结果及分析
为验证算法有效性,本文使用nuScenes 数据集对基于视觉感知的波束对准方法进行仿真验证,该数据集使用一辆装备有5 台远程雷达,6 个相机的采集车采集了100 多个驾驶场景中的驾驶数据,对场景中的每个对象都进行了3D 框标注和属性注释,场景丰富,复杂性较高。
图4 是在车辆纵向行驶的场景下的波束对准结果,表1 中为车辆目标波束对准的误差。图中左侧为场景图像,其中检测到的车辆目标被蓝色的3D 框框出。图片右侧为目标对应的极坐标图,绿色正方形标记位于(0,0) 点,表示天线位置,红色三角形标记表示检测到的车辆,蓝色加号标记表示数据集中标注的目标位置,波束的长度表示目标到车体的距离。
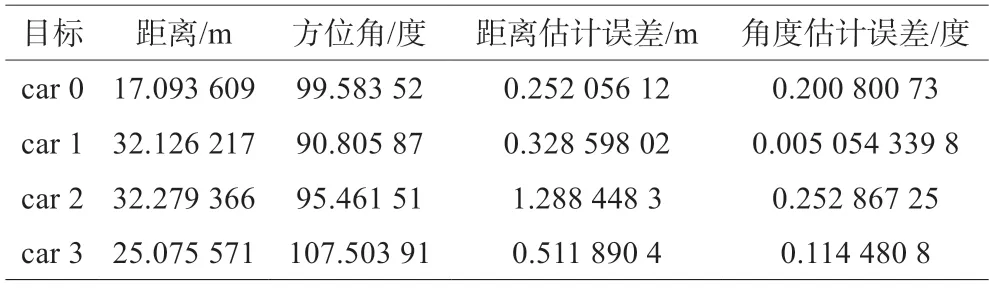
表1 波束对准误差表
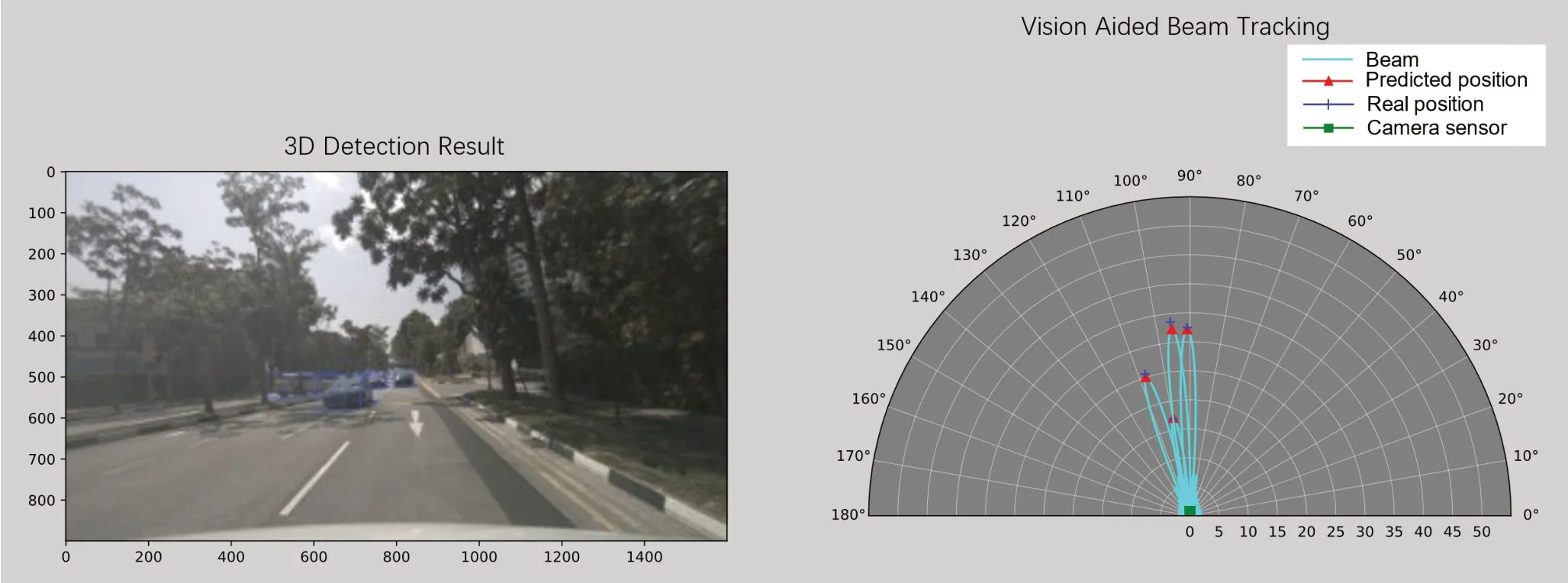
图4 目标位置估计和波束对准结果
观察图4,可以看到图中4 个车辆目标都被目标检测算法检测到,位置用3D 框标记。极坐标图中,算法估计的目标位置于目标真实位置几乎重合,4 个波束分别指向4 个目标,波束长度代表车体到目标的距离,生成了相应的波束成形矢量,实现对车辆目标的波束对准。
观察表1 的数据,对比不同位置的目标的距离误差,目标距离车体越远,距离估计的误差越大,但整体上距离误差较小。角度误差整体上都较小,角度估计精度较高。对比car 1 和car 2,其距离近似相等,但car 2 周围较拥挤,且被前车遮挡,而car 1 周围较空旷,car 2 的距离误差和角度误差远大于car 1,说明车辆目标周围其他目标的增加阻挡了波束对准的有效路径,使得波束对准的精度下降。
图5 是在车辆横向行驶场景下,多张连续帧场景图像的波束对准及波束跟踪结果。场景图像中检测到的车辆目标被蓝色的3D 框框出,极坐标图中,红色三角形标记表示检测到的车辆,波束的长度表示车辆目标到本车体的距离。
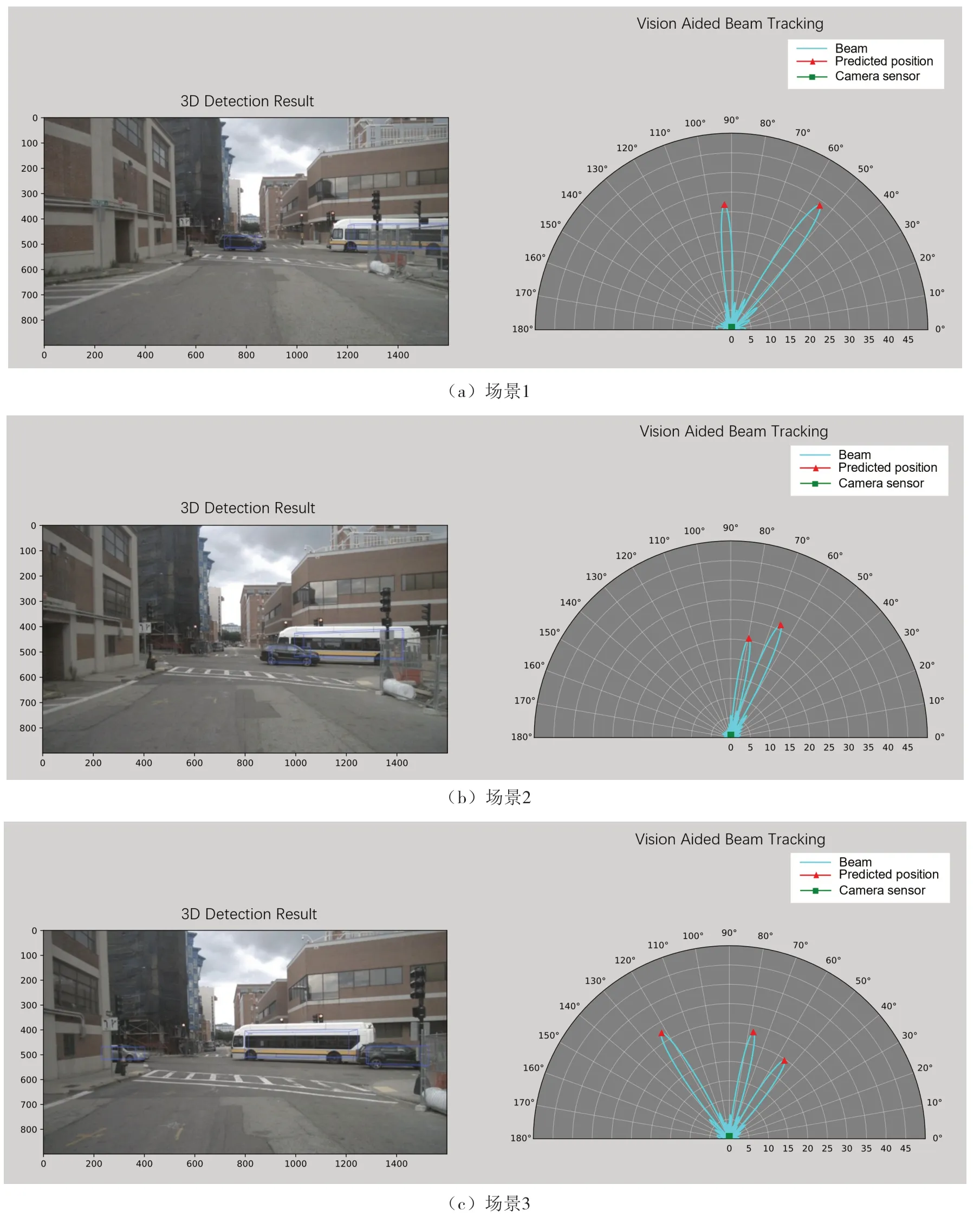
图5 连续场景下波束对准及波束跟踪结果
观察图5(a),图中的车辆目标都被3D 检测框标记,标记与车辆重合。极坐标图中,生成的波束指向目标方向。对比图5(a)和图5(b),可以看到图中两辆车发生了移动,但都被算法检测到,用3D 框标记。极坐标图中,生成的波束跟随目标位置的变化相应变化,波束方向仍指向目标。对比图5(b)和图5(c),图中出现的第三辆车也被算法检测到。极坐标图中,对3 个目标生成了3 个指向的波束。同时,指向前两个目标的波束继续跟随目标位置的变化相应变化。仿真结果表明,基于视觉感知的V2V 毫米波波束对准,对于多个目标的场景可以完成相对精确的波束对准。
4 结束语
针对V2V 毫米波通信中传统波束搜索方法开销较大的问题,本文采用了基于视觉感知的波束对准方法。利用FCOS3D 算法估计车辆目标的三维位置,通过坐标变换得到目标方位角及距本车体的距离,从而达到波束对准的目的。仿真结果表明,基于视觉感知的V2V 毫米波波束对准可以在较低硬件开销的情况下,完成相对精确的波束对准。但是场景光线条件对于算法性能的影响未知,因此,在后续的研究中,需要针对场景中光线条件变化的情况进行讨论并且进一步优化算法。
猜你喜欢
通信技术(2019年3期)2019-05-31
当代陕西(2018年12期)2018-08-04
电子测试(2018年6期)2018-05-09
声学与电子工程(2017年1期)2017-06-22
中国惯性技术学报(2017年1期)2017-06-09
电力系统及其自动化学报(2016年5期)2016-12-01
探测与控制学报(2015年4期)2015-12-15
焊接(2015年1期)2015-07-18
焊接(2015年1期)2015-07-18
四川师范大学学报(自然科学版)(2015年4期)2015-02-28
