
基于摇杆滑块机构的外骨骼肘关节优化设计∗
2024-01-05 07:16:24马相林黄嘉昕吴洪涛
振动、测试与诊断 2023年6期
马相林, 黄嘉昕, 茅 琨, 李 耀, 吴洪涛
(1.南京工程学院工业中心、创新创业学院 南京,211167)
(2.南京航空航天大学机电学院 南京,210016)
引 言
外骨骼主要应用于军事、工业、医疗康复(助老助残)及锻炼等领域,可穿戴式外骨骼机器人的使用率非常高。外骨骼一般分为上肢外骨骼[1-5]、下肢外骨骼[6-7]、踝关节外骨骼[8-10]与手部外骨骼[11],而康复外骨骼涉及脑机接口[12]、肌电感知与人机交互[13]等技术。目前,针对上肢康复训练外骨骼机器人的研究众多。 Wu 等[14]设计的5 自由度运动康复肘腕外骨骼,其肘关节转动协调机构较为复杂。赵智睿等[15]设计的负重弯举气动肌肉上肢外骨骼机器人,其肘部结构的弯曲运动使用了气动肌肉。Chang等[16]提出一种新型机器人腿的设计方法,运用了曲柄滑块机构,结合摇杆滑块机构自身运动可靠的优势,运用连杆结构的驱动方式,可改善气缸施力下的缸体自身摆动引起的运动空间较小的缺陷。对于上肢外骨骼机器人的肘部转动结构部分,可将气缸在臂部外侧固定放置,优化连杆结构的尺寸。
笔者设计了一种基于摇杆滑块机构的上肢外骨骼机构,实现肘关节的可靠转动,扩大了运动空间。首先,在运动学分析中利用D-H 参数法,基于Matlab 中的机器人工具箱模拟出上肢外骨骼的活动空间,采用静力学分析,推导机构垂直态处的气缸与手部末端的力学关系,根据手部末端受力情况选定合适的气缸动力源;其次,给出ADAMS 的尺度优化设计,进行相应机械结构的优化仿真,得到更具鲁棒性的上肢外骨骼肘部尺度;然后,依靠优化数据进行驱动力仿真,利用ANSYS 软件进行上肢外骨骼的关键零件瞬态结构分析,使校验材料选定时的位移与屈服结果均满足许可条件;最后,采用肌电信号(electromyography,简称EMG)模块采集上肢肌肉电信号变化情况,比对未穿戴举水实验与穿戴举水实验二者的上肢肌肉(肱二头肌)的功率值,对上肢外骨骼的性能进行评估。
1 上肢外骨骼的运动学分析
1.1 正向运动学
人体上肢自由度众多,主要来自肩关节、肘关节和腕关节。针对肘关节部分绘制三维模型,考虑控制简便与防止机构干涉,其肘关节的结构设计保留一个自由度。上肢外骨骼机器人D-H 坐标系如图1所示。

图1 上肢外骨骼机器人D-H 坐标系Fig.1 D-H coordinates system of upper limb exoskeleton robot
为了更好地分析上肢外骨骼机构的运动轨迹,采用D-H 坐标变换[17]建立该机构的运动学模型。上肢外骨骼的D-H 参数如表1 所示,其中:θi为关节角;di为连杆偏距;ai为连杆长度;αi为连杆扭转角。以外骨骼穿戴时的中间轴线为位姿变换路径,进行后续研究。其中,肩关节处的O0点可视为基坐标,肘关节处O1点与手腕处O2点视为动坐标,用来简化上肢复杂的自由度,并给出相应的位姿变换矩阵。
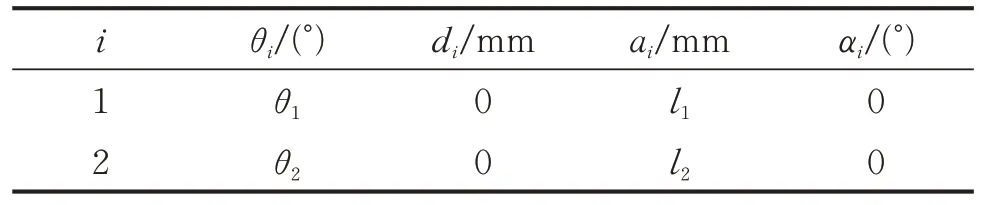
表1 上肢外骨骼的D-H 参数表Tab.1 D-H parameters of upper limb exoskeleton
定义变换矩阵0NT是关于n个关节变量的函数,用来求解如下位姿矩阵
将以上变换矩阵连乘可得到O2点相对于基点O0的变换矩阵02T=01T12T,即
其中:c1表示cosθ1;s1表示sinθ1;c12表示cos(θ1+θ2);s12表示sin(θ1+θ2);l1表示a1,l1=300 mm;l2表示a2,l2=280 mm。
基于正向运动学模型,可以根据关节驱动的变化得到外骨骼机器人手部位姿变化,为计算上肢外骨骼的工作空间提供依据[18]。
1.2 逆向运动学
对于上肢外骨骼机器人的逆向运动学求解,在运动中给定末端的位姿,从而求解各个关节的运动变量[19],即
在式(4)左边,末端执行器的位姿是已知的,而01T和12T未知,由θ1,θ2的大小确定Ti的值,分离关节变量,求解各个关节变量的转角,即
1.3 上肢外骨骼的活动空间
上肢活动空间定义为上肢外骨骼机器人的末端所能达到的任何子空间集合。为避免在使用过程中对人体产生伤害,必须限制运动空间范围。在上肢外骨骼的模拟中定义了关节限制,肩关节的运动范围θ1∈[-15°,80°],肘关节的运动范围θ2∈[0°,90°],设置迭代次数为30 000 次,利用Matlab 模拟上肢外骨骼的平面活动空间,如图2 所示。
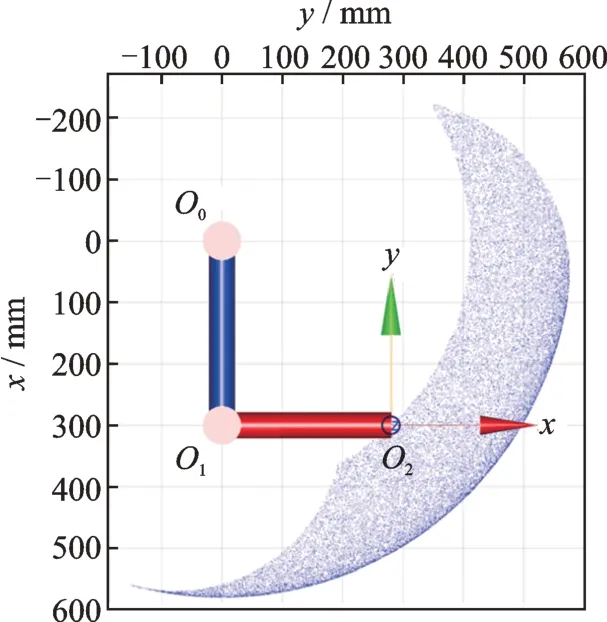
图2 上肢外骨骼的活动空间Fig.2 The outer skeleton of the upper limb
2 摇杆滑块机构的设计
上肢外骨骼摇杆滑块机构[20-21]的运动状态二维简图如图3 所示,其中:O1为肘关节旋转中心;S为悬垂点至垂直点距离(气杆行程)。气缸固定,气杆可视为滑块,转动关节(肘部)结构可视为摇杆。

图3 摇杆滑块机构的运动状态二维简图(mm)Fig.3 The motion state of the rocker slider mechanism two-dimensional diagram (mm)
上肢外骨骼的姿态可设定为如图3 所示的2 种位置姿态:①气杆零位移时的悬垂态;②气杆满行程时的垂直态。通过式(6)可算得摇杆滑块机构的自由度为1,即只需要1 个驱动就能驱动整个上肢外骨骼处的肘关节,故该机构控制简单,关节运动协调性好。
其中:δ为摇杆滑块机构的自由度;n为运动构件的数目(不含机架);PL为低副的个数;PH为高副的个数。
机构具有确定运动的条件为自由度大于零且主动件的数目要等于自由度数,可知摇杆滑块机构的设计符合条件。定义图3 中杆件长度lHJ=40 mm,lHO1=45 mm,e=34.7 mm,φ1=105°,φ2=15°,S=61.7 mm,杆件HJ与杆件HO1之间的夹角记为β。在垂直态的静态状况下进行受力分析,可分别推导出其静力学公式。
对于杆件HO1O2,可得
对于活塞杆件KJ,可得
杆件JH为二力杆件,即FJH=FHJ。
由合力矩定理,在杆件HO1O2中,以H点、O1点及O2点分别起矩,可得
进一步可以推出
因此可以得到
其中:FX为上肢外骨骼在垂直态时手腕处负载垂直分力。
由气缸理论出力估算公式,可得
其中:F为理论值;D为气缸内径(活塞直径);P为气缸的工作压力。
可以得到
由图3 中预设尺寸,在垂直态处有
将杆件尺寸与预设尺寸代入,可得β≈ 50°,于是可间接得到
根据工作所需力的大小来确定活塞杆上的推力和拉力。在实际应用中,设定对应的末端负载FX后,便可得到相应的气缸型号参数PD2。在确定型号时,气缸的尺寸需要尽可能小,目的是避免结构笨重,即在气缸内径取定后,便可得到对应的气源压力。机构的运动极限位置源于气缸的行程及其摆放位置与连杆长度,若需要增大上肢活动空间,可改变连杆长度与转动关节(摇杆)的长度及方位,根据设计需要进行选择。
3 基于ADAMS 的尺度优化设计
3.1 尺度优化设计
根据已知的几何尺寸,建立如图4 所示的上肢外骨骼机器人的运动分析图。其中:点A左侧为大臂的水平位置,CD为小臂的位置;L12,L23分别为连杆的长度;J1,J2分别为AB的初始位置和DCE三点夹角;L为气缸运动行程。在此基础上建立目标函数以及约束函数,计算的主要目标是得到合适的杆长和初始位置,使得大小臂之间的夹角尽量最小。
定义模型的设计变量为
目标函数为
约束条件为
根据上述条件对各点进行如下参数化定义
在ADAMS 环境下建立参数点和杆件以及各个杆件之间的运动副关系,相应的参数化模型如图5 所示。
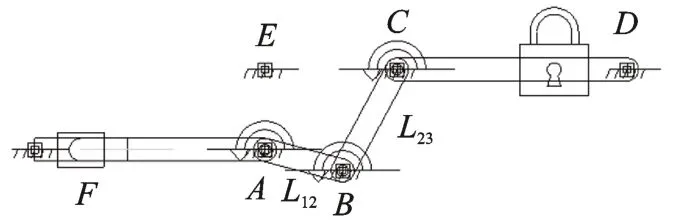
图5 ADAMS 环境下参数化模型的建立Fig.5 Parametric model building in the ADAMS environment
图5 与图4 的结构一致,其中A,B,C点都为铰链点。C点是与机架进行连接的铰链点,其他都是两杆件连接的铰链点。运动过程为左侧滑动副驱动带动AB杆和BCD杆转动,完成小臂的转动。E点为测量点,直接测量ECD角度,其余点为固定点,是为了方便创建测量数据。参数点和杆件以及各个杆件之间的运动副关系建立之后,进行相应的机械结构优化仿真,结构优化设计结果趋势见图6。

图6 结构优化设计结果趋势图Fig.6 Trend diagram of the results of the structural optimization design
可以看出:L12,L23和J1为自变量,在约束条件下不断变化;J2为因变量,会随着设计变量不断变化,使其产生最小值来满足目标函数的要求。由图6 可知,J2在设计变量的作用下不断变小,在允许约束条件下产生的最小值为15°,表明大臂和小臂之间的夹角在图示的最终参数下能够产生最小值在15°左右,满足人体手臂运动的极限位置要求。优化前后参数对比如表2 所示。

表2 优化前后参数对比表Tab.2 Comparison table of parameters before and after optimisation
J2的优化角度值缩减为原始的58.9%,大小臂之间的运动范围角度是J2的补角,J2越小,大小臂运动范围角就越大。由表2 可以看出,优化后J2变小,大小臂的运动区域越大。
3.2 运动规律过程分析
根据优化后的杆长数值,将原先初步设计的尺寸进行更替,取整数lHJ=L12=50 mm,lHO1=L23=34 mm,气缸位置固定不变,可以得到在行程为S=61.7 mm 时优化前后的极限位置变化对比,如图7所示。

图7 优化前后的极限位置变化对比Fig.7 Comparison of limit position changes before and after optimization
可以发现,在优化后的杆长更替下,机构的运动范围得到了大幅度提升,且在人体上肢的安全活动范围内。大小臂的弯曲夹角由气杆满行程时的垂直态变化到57.5°,零位移时小臂偏离悬垂态夹角仅为10.5°,与人体上肢放松时姿态一致,故尺度优化效果显著。
4 驱动力仿真与瞬态结构分析
4.1 驱动力仿真
根据尺度优化的结果更新外骨骼模型,将更新后的模型导入ADAMS,分析在手臂进行收拢时所需要的驱动力,以及在末端载荷为10~50 N 时的驱动力变化状况。气杆推力来源于摇杆滑块机构的设计,优化后的外骨骼收拢示意图如图8 所示。

图8 优化后的外骨骼收拢示意图Fig.8 Schematic diagram of the assembled exoskeleton after optimization
收拢过程分析结果如图9 所示。由图可知,在外界负载的变化下,大臂与小臂的收拢动作中只有一段距离内的驱动力范围较大,其他过程的驱动力范围较小,故只需对该范围内的最大点进行关键零部件的验证即可。
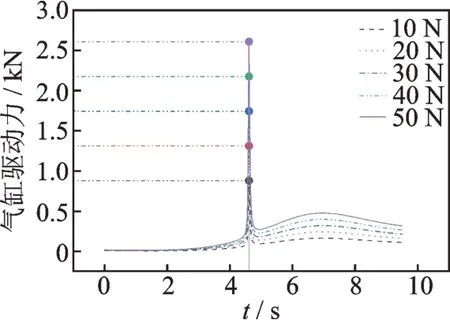
图9 收拢过程分析结果Fig.9 Analysis results of the folding process
提取驱动力范围部分数据,如表3 所示。可以发现,位于4.61 s 处在不同外界负载的作用力下,气缸驱动力增长速率远大于其余时间点,故只对该点进行关键零部件的瞬态结构分析。
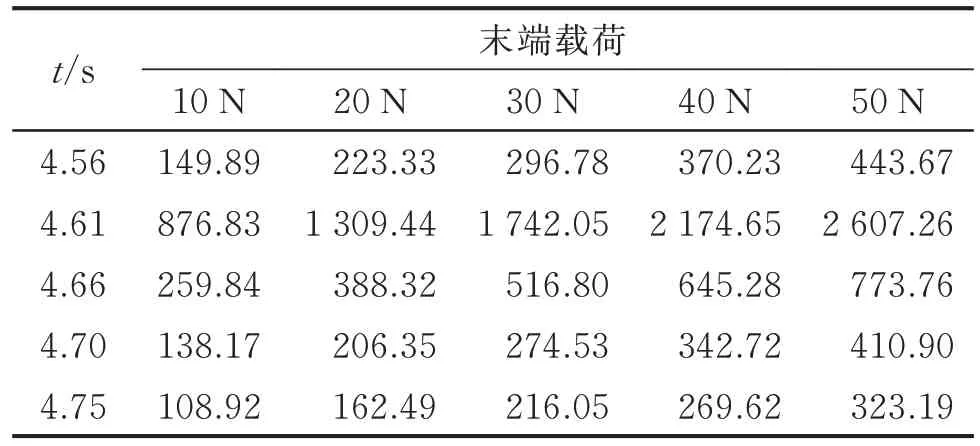
表3 驱动力范围部分数据Tab.3 Drive range partial data N
4.2 瞬态结构分析
确定好零部件的几何尺寸后,验算关键零部件的受力情况和变形程度。在Ansys workbench 的平台内创建瞬态结构分析模组,导入模型设置好的零部件材料属性,对各个零部件的运动副关系进行约束。定义重力方向和末端的作用力方向,作用力的大小为50 N。对驱动结构中的连杆进行网格划分,其他的都定义为刚体,以减少分析难度和计算量。瞬态结构分析模型设置如图10 所示,其中:A为作用在腕部始终垂直向下的作用力,其大小为50 N;B为向下的标准地球重力。
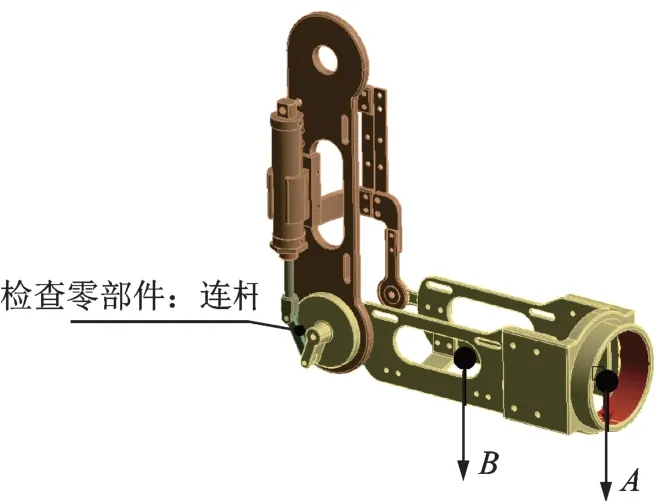
图10 瞬态结构分析模型设置Fig.10 Transient structure analysis model setup
在瞬态结构下分析连杆的变形和受力情况,瞬态结构分析结果如图11 所示。由图可知,材料为5052 铝合金时,最大变形量为0.008 9 mm,最大等效应力为32.1 MPa。材料本身的屈服强度为195 MPa(25℃),连杆的变形和受力大小满足工作条件,最大变形量均在可接受范围内,校验材料选定时位移与屈服结果均在许可条件内,结构优化设计符合使用条件。
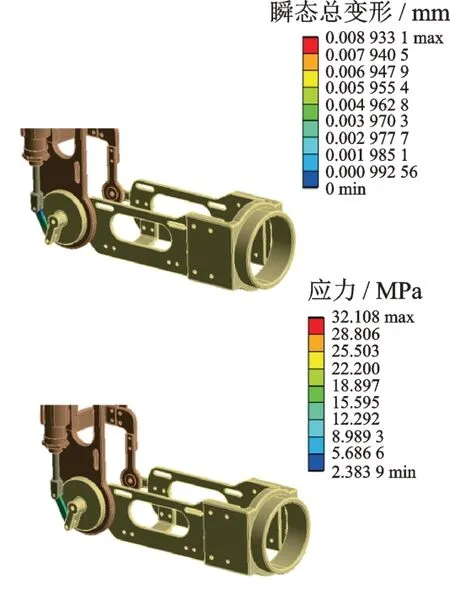
图11 瞬态结构分析结果Fig.11 Transient structure analysis results
5 上肢外骨骼的性能评估
上肢外骨骼的性能评估采用肌电信号EMG模块采集上肢肌肉电信号,对比未穿戴举水与穿戴举水二者的上肢肌肉(肱二头肌)的功率值变化情况。
表面肌电信号(surface electromyography,简称sEMG)是浅层肌肉EMG 和神经干上电活动在皮肤表面的综合效应,其信号是神经肌肉系统在进行随意性和非随意性活动时的生物电变化经表面电极引导、放大、显示和记录所获得的一维电压时间序列信号,能在一定程度上反映神经肌肉的活动情况[22-24]。具体性能评估采取上臂弯举握水实验,人体上肢运动实验示意图如图12 所示。

图12 人体上肢运动示意图Fig.12 Diagram of human upper limb movement
针对实验人体上肢的肱二头肌,采集EMG 信号来进行上肢外骨骼的使用性能评估。基于EMG硬件与上位机数据采集,进行单臂肘关节弯举水瓶实验,得到未穿戴上肢外骨骼机器人时的EMG 数据(OFF-Exo)与穿戴上肢外骨骼机器人时的EMG数据(ON-Exo)。单臂肘关节弯举水瓶实验如图13所示。
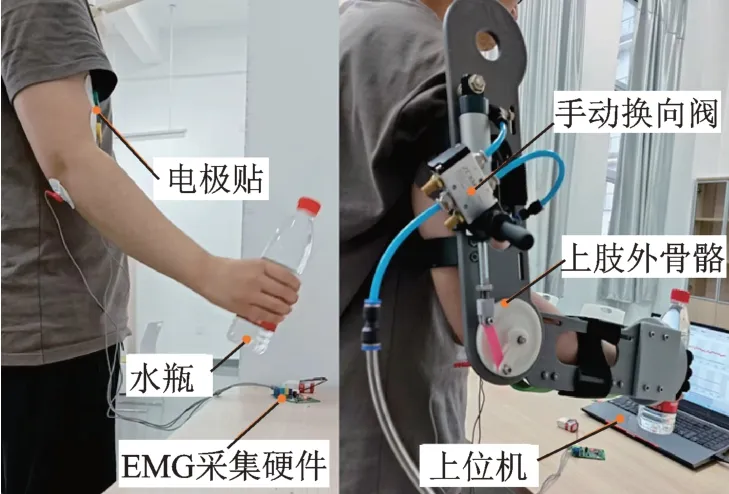
图13 单臂肘关节弯举水瓶实验Fig.13 One arm elbow joint bending water bottle lifting experiment
OFF-Exo 与ON-Exo 采集后需要进行数据处理。将上位机所采集的数据文本txt 文件导入Excel中进行简单处理,再将所需的数据集导入Matlab 中进行EMG 肌电信号分析,得到滤波处理后的EMG肌电信号包络线如图14 所示,其中纵坐标为肱二头肌的肌电强度。

图14 实验采集的EMG 信号滤波处理后的信号包络Fig.14 Signal envelope of EMG signal collected by experiment after filtering
比对OFF-Exo 与ON-Exo 的功率信号包络发现,穿戴上肢外骨骼进行弯举水瓶时的肱二头肌肌肉激活功率相比未穿戴上肢外骨骼时有所下降,说明上肢外骨骼机器人的助力效果良好,可增强人体上肢运动的耐力,或对上肢无力者进行康复训练。通过肱二头肌的肌电信号特征进行分析,验证了肘关节助力的可行性与正确性。
6 结束语
针对上肢助力外骨骼肘关节采用优化设计的理念,对摇杆滑块机构进行设计,在给定参数下进行肘部结构的尺度优化,从而计算出更加合理的结构参数。通过优化前后的工作空间对比发现,运动效果改善显著。依靠优化数据进行驱动力仿真,采用ANSYS 软件对上肢外骨骼的关键零件进行瞬态结构分析,得到最大变形量为0.008 9 mm,最大von Mises 等效应力为32.1 MPa,校验材料选定时的位移与屈服结果均满足条件。针对振动问题,采取阻尼转动装置与气动缸的并联方式,实现一定的缓冲助力与减震效果,依靠摇杆滑块机构与阻尼转动装置耦合,使肘部关节的运动更加柔顺,可有效避免振动带来的影响。利用EMG 模块采集上肢肱二头肌的肌肉电信号变化情况,发现穿戴外骨骼进行弯举水瓶时的肌肉激活功率相比未穿戴时有所下降,说明上肢外骨骼机器人的助力效果良好。
猜你喜欢
军事文摘(2024年6期)2024-02-29 09:59:38
电脑爱好者(2022年5期)2022-05-30 14:58:47
四川建筑(2021年1期)2021-03-31 01:01:46
小哥白尼(野生动物)(2021年12期)2021-03-29 01:15:34
南方农机(2021年3期)2021-02-07 09:07:04
高师理科学刊(2020年2期)2020-11-26 06:01:16
湖北农机化(2020年17期)2020-11-02 07:46:54
建筑机械化(2020年7期)2020-08-15 06:41:32
中南大学学报(自然科学版)(2016年2期)2017-01-19 07:36:58
科技创新与品牌(2016年8期)2016-09-29 22:25:52
