机器人辅助下经皮加压螺钉治疗Herbert B2型腕舟骨骨折
2024-01-04 02:48任伟平李刚
实用骨科杂志 2023年12期
任伟平,李刚
(山西医科大学第二医院骨科,山西 太原 030001)
舟骨骨折是腕骨骨折中最常见的骨折之一,多见于舟骨腰部骨折[1]。对于有移位或伴有腕关节不稳定的舟骨骨折多数学者建议切开复位内固定,而对于无明显移位的新鲜腕舟骨腰部骨折,目前尚无统一的治疗方案,相比传统前臂管形石膏固定,经皮加压螺钉固定有创伤小、早期康复锻炼和愈合率高等优点,逐渐被临床医生采用[2-3]。但由于舟骨大小、形态和位置较为特殊,使置入的螺钉位于最佳位置,即使是对于临床经验极其丰富的专家也是一种挑战。骨科机器人辅助内固定技术在精准定位、减少穿针次数、减少创伤方面和传统手术相比优势明显,在骨科手术中应用越来越广泛[4]。本研究回顾性分析了2020年1月至2021年12月山西医科大学第二医院收治的35例新鲜腕舟骨骨折患者,分别在机器人辅助下和C型臂透视下进行徒手经皮加压内固定治疗,比较两者临床疗效,现报告如下。
1 资料与方法
1.1 一般资料 纳入标准:(1)新鲜骨折,受伤至手术时间小于3周;(2)骨折均为Herbert B2分型,无明显的移位或移位<1 mm。排除标准:(1)陈旧性、病理性和开放骨折;(2)合并其他腕关节不稳定疾病;(3)随访资料不全的患者。
本研究共纳入35例患者,其中男19例,女16例;年龄18~38岁,平均(29.37±18.42)岁。术前影像学检查显示均为腕舟骨腰部完全骨折,无明显移位或移位<1 mm,按照Herbert骨折分型均为B2分型,受伤原因均为低能量损伤(走平路时摔倒和运动损伤)。其中17例患者采用骨科手术机器人辅助下经皮螺钉内固定(机器人组),男9例,女8例;年龄18~38岁,平均(29.53±18.57)岁;受伤至手术时间1~4 d,平均(2.53±0.64)d。18例患者采用C型臂透视下徒手经皮螺钉内固定(徒手组),男10例,女8例;年龄18~36岁,平均(29.37±19.32)岁;受伤至手术时间1~5 d,平均(2.44±0.97)d。
1.2 手术方法
1.2.1 机器人组 臂丛神经阻滞麻醉,仰卧位,患肢外展90 °,腕关节背伸20 °~25 °,轻度尺偏位固定于外展手术桌面。将患肢前臂以及手掌固定,消毒铺巾后将示踪器固定于前臂皮肤上。待机器人安装调试完成后,拍摄腕关节正侧位X线片,规划空心钉导针进针点、进针方向和螺钉长度,调整导针与舟骨长轴平行。机器人手臂按照规划路径为螺钉置入提供进针通道,然后将导针打入,再次透视见导针位置满意后拧入空心螺钉1~2枚。
1.2.2 徒手组 麻醉方式和术中患肢体位与机器人组相同,拍摄腕关节正侧位X线片确认骨折复位情况,从掌侧打入临时克氏针防止骨折移位。透视下定位舟骨结节及舟骨近极,两者之间的连线作体表标志线,扪及舟骨结节,于舟骨结节桡侧、背侧旁开2 mm为进针点,术中透视证实进针点满意,打入空心钉导针直到和舟骨长轴平行,拧入空心螺钉1~2枚,最后拔除临时克氏针,再次透视空心钉位置令人满意。
1.3 术后处理 术后第2天开始手指屈伸功能锻炼,循序渐进增大手指活动度和力度,复查X线片观察螺钉位置,待下次复查时根据骨折愈合情况,逐渐恢复强度较大的运动。
1.4 随访和疗效评价 记录手术时间、穿针次数、放射次数、打入2枚螺钉的病例数;术后4周、8周、12周和每3个月复查腕关节正侧位X线片了解骨折愈合情况,必要时CT进一步明确。采用疼痛视觉模拟评分(visual analogue scale,VAS)评价疼痛情况,采用Mayo腕关节评分评价功能。
2 结 果
机器人组手术时间显著长于徒手组(P<0.001);机器人组在穿针次数上显著少于徒手组(P<0.001);暴露于射线的次数,机器人组显著少于徒手组(P<0.001);打入2枚螺钉的病例数,机器人组明显多于徒手组(P<0.001)。
本研究35例患者均获随访,随访时间12~20个月,平均(15.89±4.63)个月。术后第2天,机器人组VAS评分显著小于徒手组(P=0.004)。术后12周,两组VAS评分和Mayo腕关节评分比较差异无统计学意义。术后12周,患者均骨性愈合,随访过程中均未发现内固定移位、关节炎等并发症(见表1~2)。
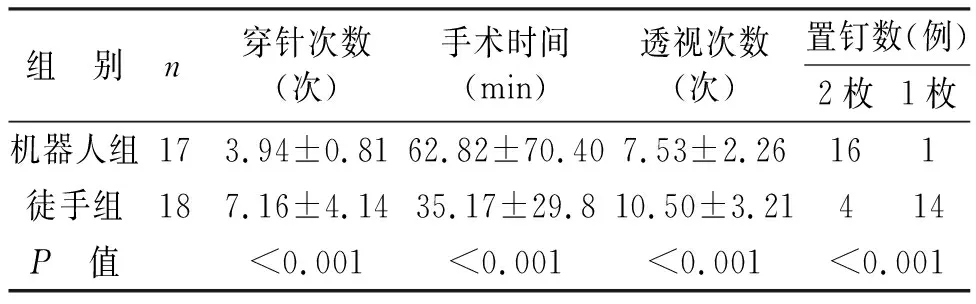
表1 机器人组和徒手组相关手术指标比较
表2 机器人组和徒手组VAS和Mayo评分比较分)
典型病例为一32岁男性患者,“摔伤致左腕部疼痛伴活动受限1 d”入院。入院后结合患者病史和影像学检查诊断为左腕舟状骨骨折(Herbert B2型)。完善术前化验和检查,排除手术禁忌证,于48 h内在臂丛麻醉下行机器人辅助下左腕舟状骨骨折闭合复位螺钉内固定术,术中可见空心钉置入位置和深度均满意,术后12周时影像学检查可见螺钉位置良好,骨折已愈合,效果满意(见图1~5)。

图1 术前X线片示左腕舟状骨骨折 图2 术中机器人辅助置入2枚空心钉

图3 腕关节体位固定 图4 手术创口小

图5 术后12周X线片示螺钉位置良好,骨折已愈合
3 讨 论
腕舟骨解剖结构复杂,表面有80%被透明软骨所覆盖,骨折后容易发生血供障碍,如果处理不当,可导致骨折延迟愈合或不愈合,甚至发生缺血性骨坏死。腕舟骨的滋养血管分别经舟骨结节和腰部背外侧进入骨内,前者占舟骨血供的20%~30%,后者占70%~80%,因此腕舟骨腰部骨折后骨块发生缺血性坏死的概率更高,尤其是腰部完全骨折,根据Herbert分型,Herbert B2型为急性完全腰部骨折。近年来多项研究表明,对于急性无移位或微小移位(<1 mm)的舟骨腰部骨折,逐渐倾向于经皮加压螺钉内固定,因为传统管形石膏固定制动时间较长,常伴有关节僵硬,且存在10%~15%的不愈合率;切开复位内固定可能进一步破坏舟骨有限的血液供应影响骨折愈合。而采用经皮螺钉加压固定治疗骨折,其优点是手术切口小,对血供损伤少,可实现骨折断端坚强有效的内固定,明显提高了愈合率,并且可以早期进行腕关节功能锻炼,有助于恢复工作和运动[5-6]。但是,由于舟骨形态结构复杂,位置隐蔽,可操作的空间有限,传统经皮内固定技术为了获得理想的螺钉位置,需要反复进行透视和调整导针,增加了手术时间和损伤关节软骨的风险。目前随着骨科机器人辅助内固定技术在骨科手术中的应用越来越广泛,相比传统经透视引导下手术,机器人组有着明显优势[7]。
(1)定位精准。有研究表明,置钉方向平行于舟骨长轴时,生物力学强度更好并且对于舟骨血供的破坏最小[8]。机器人引导下的导针置入更加准确;透视下徒手置入导针的过程难以保持稳定,轻微的抖动可引起位置出现较大的偏差,增加了穿针和暴露于射线的次数,反复置针还可导致软组织损伤加重,针道变大甚至骨块碎裂,使得骨折固定难度增加和固定不牢固[9]。而机器人利用其器械臂的引导,定位更加精准,置入导针过程是通过预设好的钢性管道,其稳定性大大提高。本研究显示机器人组的穿针和透视次数分别为(3.94±0.81)次和(7.53±2.26)次,徒手组分别为(7.16±4.14)次和(10.50±3.21)次,说明机器人引导下的手术更加高效、精准和安全。(2)利于双螺钉固定。近来有研究表明单枚螺钉固定舟骨骨折术后仍需佩戴管形石膏或支具[10],而2枚螺钉固定有着更高的力学稳定性,术后可以立即进行部分负重练习[11-12]。本研究发现,机器人辅助下螺钉固定可以精准置入双螺钉并可以精准控制2枚螺钉的位置,比透视引导下徒手螺钉固定有着明显的优势。(3)智能化。机器人系统可以扫描患者损伤部位,获得的数据为医生提供完整的手术规划,使学习曲线变短[13]。然而,在总的手术时间上,机器人组远远高于徒手置钉组,原因可能在于连接机器人设备和术前规划穿针的时间较长。
综上所述,对于新鲜Herbert B2型腕舟骨骨折,经皮螺钉内固定治疗可以取得理想的临床疗效,尤其是机器人辅助下手术有着其独特的优势,使得手术操作更简单、精准、快捷,并且缩短了学习曲线,但是机器人系统作为大型医疗装备,术者只有经过系统化学习培训和考核才能操作,整个过程需要严格按照正确地操作流程才能保证手术安全正确的进行[14],相比常规C型臂引导下手术,机器人系统昂贵的费用也限制了它的使用和推广[15]。本研究还存在一些局限性,如研究为回顾性研究,病例数量也较少,这些因素使得本研究结果可信度降低,下一步需要大样本前瞻性双盲随机对照试验来验证本研究结论。
猜你喜欢
实用手外科杂志(2022年2期)2022-08-31
青年文学家(2022年32期)2022-02-13
临床骨科杂志(2021年4期)2021-08-20
疯狂英语·新读写(2020年1期)2020-04-20
中学生数理化·八年级物理人教版(2018年9期)2018-11-09
动漫星空(兴趣百科)(2018年11期)2018-10-29
小学生作文(低年级适用)(2017年11期)2017-12-20
海外星云(2017年20期)2017-11-01
杂文选刊(2015年7期)2015-05-14
中华骨与关节外科杂志(2014年4期)2014-04-08