改进的PMSM神经网络时变互补滑模控制*
2024-01-03 01:31于海生孟祥祥陈有缘浦春强
组合机床与自动化加工技术 2023年12期
丁 豪,于海生,杨 庆,孟祥祥,陈有缘,浦春强
(青岛大学 a.自动化学院;b.山东省工业控制技术重点实验室,青岛 266071)
0 引言
永磁同步电机(permanent magnet synchronous motor,PMSM)因其体积小、效率高、响应速度快、可靠性好等优点,在机器人[1]、数控机床[2]、电动汽车[3]等要求高控制精度和高可靠性的场合被广泛应用。现如今,为了提高永磁同步电机的控制精度和响应速度,同时令其具备优秀的抗扰性能,如滑模控制[4]、自适应控制[5]、智能控制[6]等控制方法被国内外研究工作者相继提出。此外随着技术的发展和时间的推移,非线性与智能相结合的控制策略拥有了非常大的前景[7]。
利用滑模变结构控制强鲁棒性的优点,来保证良好的控制性能是一种常用手段。WU等[8]针对系统易受外界干扰的情况研究了一种新型的二阶滑模控制器,用时间来调节滑动变量,并基于有限时间扰动观测的手段设计了考虑扰动观测项的非奇异终端滑模面,以此实现系统输出的有限时间稳定。CHEN等[9]阐述了一种时变滑模控制,通过设计一个时变参数,增强滑模面的调整能力,提高了滑动面的收敛速度。WANG等[10]提出了一种时变观测器滑模控制方法保证了滑模面在有限步长的可达性。WANG等[11]为了对PMSM进行过电流保护同时提高抗干扰能力,设计了一种时变二阶非线性扰动观测器的电流约束有限时间控制。
Elman神经网络因为其自身内部的反馈结构,在处理动态信息时拥有很强的能力。在误差补偿[12]、抑制谐波和转矩脉动[13]、调整系统参数[14]等情况下得到广泛应用。丁豪等[15]提出了一种基于Elman网络的互补滑模控制,利用Elman神经网络取代互补滑模控制中的饱和函数,以此估计系统产生的不确定性,并削弱扰动现象。
为了对永磁同步电机转子位置进行高精度的跟踪,本文提出了一种基于改进的Elman神经网络时变互补滑模控制方法。带有时变项的ICSMC控制器可以使得系统于初始时刻便在滑模面上运动,且提高系统收敛速度。IElman神经网络控制律及其自适应律和鲁棒补偿器及其自适应律在更准确的估计了系统不确定性的同时可以有效地削弱系统中存在的抖振现象。此外,扰动观测器的观测和补偿作用则可以使得电机系统在面临突加扰动和参数变化时依旧保持高精度的位置跟踪性能。
1 PMSM数学模型
永磁同步电机在d-q同步旋转坐标系下数学模型:
(1)
电磁转矩公式可以写为:
(2)
式中:ω、np、J、Kb、Φ、τL分别为机械角速度、极对数、转动惯量、粘滞摩擦系数、永磁体产生的磁链和外部负载扰动,id、iq、ud、uq为同步旋转坐标系下d、q电流和电压,本文采用表贴式电机,定子电感满足Ld=Lq。
2 PMSM控制器设计
为了提高永磁同步电机伺服系统转子位置跟踪时的精度和抗扰性能,将永磁同步电机位置伺服系统设计为如图1所示。神经网络互补滑模控制器利用Elman神经网络来代替传统互补滑模控制中采用的饱和函数直接对系统存在的不确定性进行估计,并通过调整网络参数以及扰动观测器对系统的扰动进行补偿来改善系统的动态性能,提高系统的抗扰性能。此外通过无差拍电流预测控制来改善电流环的动态性能,提高其稳态精度。

图1 永磁同步电机位置控制系统结构框图
2.1 时变CSMC控制器设计
为本文所应用的积分滑模面引入一个衰减项ξ(t),以实现缩短或者消除到达阶段的目的。
选择ξ(t)=me-t/n,该项跟随时间变化,在系统运行之初取值较大,来保证以较快的速度到达滑模面;当时间趋向于无穷大时,该项趋近于0,保证系统的稳定性。
引入了时变项的积分滑模面的形式为:
(3)
本文定义的积分滑模面可以使系统的初始状态一开始便处于滑模面上,这就需要满足表达式:
S(x,0)=0
式中:m,n是常数,且n为正数。理论上,n取值越小,时变项的收敛性能越快。令S=0,使得系统在初始时刻便处于滑模面上,且保证系统的全局鲁棒性,可得:
(4)
当系统在滑模面上滑动时有:
(5)
通过式(2)可以得到简化后的电磁转矩式(6)。
(6)
可以把机械运动方程写为:
(7)

由电磁转矩公式和机械运动方程可得:
(8)
假设系统在运行在理想情况下,即忽略负载转矩和电机参数的影响,则可以得到式(9)。
(9)
若在电机的运行中考虑参数变化和外部负载扰动的影响,可以由式(9)得到:
(10)
(11)

定义跟踪误差为:
e=θm(t)-θ(t)
(12)
式中,θ(t)为电机转子运行的实际位置,θm(t)为给定位置。
所以根据式(12)定义的跟踪误差,可将时变积分滑模面S1和互补滑模面S2分别定义为:

(13)

(14)
式中:λ为大于0的常数,对式(13)和式(14)求导得:
(15)
(16)
(17)
S1,S2总和为:
(18)
选取李雅普诺夫函数为:
(19)
对式(19)求导,得到:
(20)
设计互补滑模控制律为:
iq=im+in
(21)
(22)
(23)
式中:im为等效控制律,in为切换控制律,G为边界层厚度,ε为切换控制增益,sat(·)为饱和函数,其表示为:
(24)
2.2 引入自反馈的Elman神经网络
Elman网络由4层构成。隐含层通过自联对历史状态具有敏感的响应能力,此外因为自身内部存在反馈结构,所以可以很大程度地提高其处理动态信息的能力。
在Elman神经网络基础上提出一种改进的反馈型动态神经网络,即在Elman神经网络的连接层加入自反馈环节,并通过调整增益系数来改变历史信息对未来状态的影响程度。改进后IElman网络拓扑结构如图2所示。
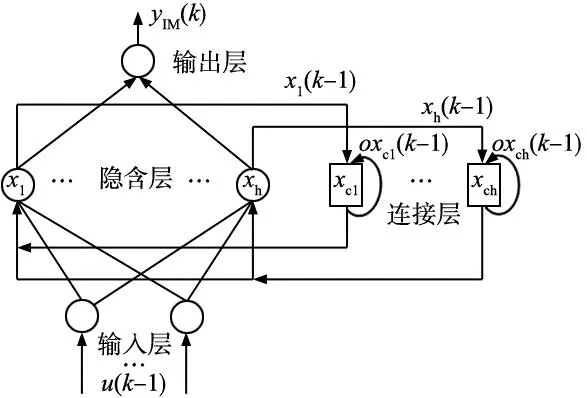
图2 IElman网络拓扑结构图
与基本的Elman神经网络相比较,它可以使高阶系统达到更好的动态精度,可以对系统不确定性有较好的估计效果。
(1)把输入层第j个节点的输入定义为netj,输出定义为xj(k)。
xj(k)=netjj=1,2
(25)
在本文中选择输入层输入为:
(26)
(2)把隐含层第k时刻的输出定义为xh(k),输入定义为neth,输入层到隐含层之间的权值矩阵定义为W1。为简化权值矩阵,可以将其写为:
W1=[W11W12W13W14W15]T
(27)
式中:W1i=W11=W12=W13=W14=W15,且W1i为1×2的行向量。
隐含层输出矢量为:
H2=[xh1xh2xh3xh4xh5]T
(28)
(29)
(30)
式中:S为网络隐含层节点的激活函数,xc(k)为连接层输出。在本文中把隐含层神经元数量选择为5个。
(3)把隐含层第(k-1)时刻的输出值xh(k-1)以及连接层(k-1)时刻的输出值xc(k-1)作为连接层k时刻的输入值。因此引入自反馈环节之后的Elman神经网络连接层表达式为:
xc(k)=xh(k-1)+oxc(k-1)
(31)
式中,o为增益系数。
(4)把隐含层到输出层的连接权值矩阵定义为:
W2=[Wh1Wh2Wh3Wh4Wh5]T
(32)
此时输出层表达式为:
(33)
2.3 ICSMC+IElman控制器设计
传统CSMC中存在相关参量的微分运算,这会使系统产生抖振现象。为了提高PMSM伺服系统对输入参考轨迹跟踪的控制性能,并削弱抖振现象,本文提出了ICSMC+IElman方法,PMSM的ICSMC+IElman 控制器结构框图如图3所示。其中IElman网络用来估计系统不确定性。因此提出的复合控制率可设计为式(34)。

图3 ICSMC+IElman结构框图
(34)
iqICSMC=iqElman+im
(35)
(36)
(37)
(38)
(39)
(40)
式中:η1、η2、η3为自整定系数,δ为Elman网络最小重构误差。
ICSMC+IElman控制器框图如图3所示。
2.4 扰动观测器设计
可以将电机的非线性系统模型表示为:
(41)
式中:iq为输入变量,x=[ωθ]T为状态变量,y=θ为输出变量。其中:
(42)
为了保证PMSM高度的控制精度,必须把参数不确定性和未知的外部负载考虑进控制器中,因此根据电机模型,引入非线性扰动观测器为:
(43)

(44)
(45)
将永磁同步电机互补滑模控制式(22)带入式(43)中,可以得到:
(46)
由式(45)和式(46)可得:
(47)

2.5 无差拍电流预测控制
将式(6)代入式(1)得PMSM电流预测模型[15]:
i(k+1)=A(k)i(k)+Bu(k)+C(k)
(48)
式中,
(49)
可得电流预测方程:

(50)
3 仿真分析
选择PMSM的参数:磁链Φ=0.29 Wb,定子电阻Rs=0.93 Ω,定子电感Ld=Lq=3 mH,极对数np=4,转动惯量J=0.003 kg·m2,额定功率为1.5 kW,额定转速为1000 r/min。在CSMC与ICSMC仿真中,参数设置为Kb=0.000 4,ε=7,λ=200,G=0.002。选取自整定系数η1=1、η2=0.5、η3=2,网络自反馈增益o=10。
在MATLAB软件的Simulink环境中搭建三闭环CSMC、CSMC+Elman、ICSMC+IElman+DOB控制器。3种控制策略在电流环均采用无差拍电流预测控制器,本文中不对其做单独的比较。设置采样时间设为2×10-4s。
验证改进的Elman神经网络时变互补滑模控制控制方法的有效性,对CSMC、CSMC+Elman、ICSMC+IElman+DOB三种控制方法进行仿真。
情况1:给定位置输入信号为θ*=10sin(t) rad,图4和图5分别为空载启动时给定信号下的PMSM位置跟踪曲线和跟踪误差曲线。从图4和图5中可以看出,ICSMC+IElman+DOB控制能够使系统具备优秀的跟踪精度。在图4中可以看出与CSMC策略相比,Elman神经网络的加入在使得系统跟踪精度达到10-5,同时还有效地削弱了CSMC控制过程中产生的抖振现象,抖振的振幅大约被削弱了30%左右。ICSMC+IElman+DOB控制策略在进一步提高控制精度的同时,也提高了误差收敛的速度,比CSMC+Elman策略提高了近25%。

图4 位置跟踪曲线 图5 位置跟踪误差曲线
情况2:给定位置输入信号为θ*=10sin(t) rad,电机空载启动,4 s时加入2 N·m的负载,12 s时再加入5 N·m的负载。图6是电机的位置跟踪曲线,图7是电机的位置误差跟踪曲线。从图7中可以看加入负载之后,系统产生的误差变大。CSMC方法的控制精度在第4 s和第12 s掉落到10-3。相比于CSMC、CSMC+Elman两种控制方法,ICSMC+IElman+DOB控制方法在系统突加扰动时,依旧保持了最高的控制精度和最优秀的抗扰性能。图8为位置跟踪误差曲线局部放大图,其展示了在电机初始运行阶段,位置跟踪误差的收敛情况,从图8中可以看出ICSMC+IElman+DOB有效降低了位置跟踪的超调量,并使得误差更快速的收敛,令系统进入稳态。图9是观测器估计的扰动值,观测器的加入能够对突加扰动进行快速的估计和补偿,从图9中可以看出其响应时间为0.06 s左右,具有优秀的响应速度。图10为d-q轴电流曲线,电流曲线相对平滑。

图6 位置跟踪曲线 图7 位置跟踪误差曲线
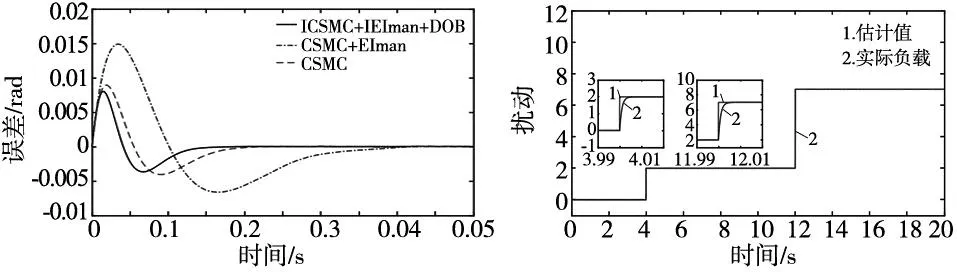
图8 位置跟误差局部放大图 图9 扰动估计曲线
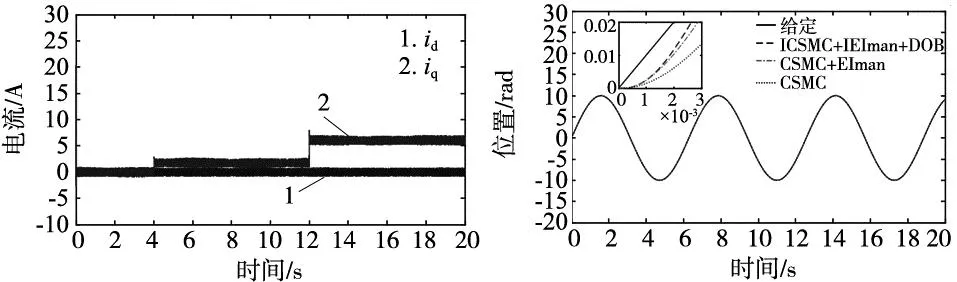
图10 d-q轴电流曲线 图11 位置跟踪误差曲线
情况3:给定位置输入信号为θ*=10sin(t) rad,电机带载启动,开始运行时加入2 N·m的负载,在10 s时再加入5 N·m的负载。图11展示的是电机位置的跟踪曲线,图12展示的是位置误差曲线。图13为误差局部放大图,展示系统开始运行阶段,误差的收敛情况。从图11和图12可以看出当电机带负载在启动时,ICSMC+IElman+DOB在所设计的3种控制器中跟踪精度最高。从图12和13可以看出在第10 s加入负载后ICSMC+IElman+DOB控制方法在保证优秀的抗扰动性能的同时也提高了系统进入稳态的速度,保证了系统的全局鲁棒性。图14展示了观测器对扰动的估计情况,从图14中可以看出观测器在系统带负载启动时对系统扰动快速的进行估计和补偿,增强了系统鲁棒性能。图15为d-q轴电流曲线。

图12 位置跟踪误差曲线 图13 位置跟踪误差局部放大图

图14 扰动估计曲线 图15 d-q轴电流曲线
4 结论
本文提出了一种基于改进的Elman神经网络时变互补滑模控制方法。首先,该控制策略在积分滑模面中加入了一个时变的衰减项,成功缩短了系统的到达阶段,有效提高了转子位置跟踪误差的收敛速度,保证了系统在全局稳定的前提下具备更快的收敛速度,收敛速度提升了25%以上。其次,该控制策略利用具有自反馈环节的IElman神经网络估计滑模控制中产生的不确定性,使得网络对历史数据具备了更强的敏感性。此外,该控制器设计了IElman网络和鲁棒补偿器的自适应律,使得系统拥有了强鲁棒性。最后,该控制器设计了扰动观测器对扰动进行观测和补偿,提高了系统在突加扰动和参数变化时的控制精度。仿真结果表明,本文所提出的改进的Elman神经网络时变互补滑模控制在不同的运行情况下,都能使电机具备良好的位置控制精度,且对负载扰动具有强鲁棒性。
猜你喜欢
中国惯性技术学报(2019年6期)2019-03-04
测控技术(2018年4期)2018-11-25
测控技术(2018年3期)2018-11-25
智富时代(2017年4期)2017-04-27
智富时代(2017年4期)2017-04-27
广东石油化工学院学报(2016年6期)2016-05-17
铁道科学与工程学报(2015年5期)2015-12-24
深空探测学报(2015年3期)2015-12-07
中国铁道科学(2015年4期)2015-06-21
电测与仪表(2015年19期)2015-04-09