
机器人导航伤椎置钉固定胸腰椎骨折△
2024-01-02 09:18潘大洋刘炯龙浩邹伟肖杰
中国矫形外科杂志 2023年24期
潘大洋,刘炯,龙浩,邹伟,肖杰
(贵阳市第四人民医院,贵州贵阳 550002)
椎弓根螺钉内固定是治疗胸腰椎骨折最常用的固定方法,其中伤椎置钉有利于恢复和维持术后生理高度及曲度[1,2]。然而伤椎螺钉可能固定在骨折线上,这对骨折愈合和内固定稳定性有一定影响。有学者通过动物椎体椎弓根螺钉生物力学研究得出[3-4],增加螺钉矢状位角度与平行置钉对比,螺钉抗拔出力得到加强,力学稳定性得到提升。对于上终板塌陷为主的胸腰椎骨折,伤椎可以通过Tinavi 骨科机器人导航下加大置钉矢状位的头倾角,把椎弓根螺钉精准固定于伤椎正常骨质处,避开伤椎骨折线,可增强螺钉把持力,提高钉棒内固定系统的稳定性。因此本文将探讨Tinavi 骨科机器人导航下加大伤椎椎弓根螺钉矢状位置入头倾角治疗上终板塌陷为主的胸腰椎骨折疗效。
1 临床资料
1.1 一般资料
回顾性统计分析2018年8月—2021年6月在本院行经皮椎弓根螺钉内固定术治疗胸腰椎骨折60 例患者的资料,均为终板塌陷为主的胸腰椎单椎体骨折,受伤至手术时间<14 d,接受椎弓根螺钉内固定术;美国脊髓损伤协会(American Spinal Injury Association,ASIA)分级为E 级[5],TLICS 评分(Thoracolumbar Injury Classification and Severity Score)≥4分[6]。按术前医患沟通结果,其中25 例接受Tinavi骨科机器人导航下加大伤椎椎弓根螺钉矢状位置入头倾角治疗(机器人组);35 例接受术中C 形臂X 线机透视引导下伤椎螺钉矢状位平行置钉(常规组)。两组患者年龄、性别、损伤至手术时间等一般资料的比较差异均无统计学意义(P<0.05)。本研究经医院伦理委员会审批,所有患者均知情同意并签署手术知情同意书。
1.2 手术方法
机器人组:完成麻醉及术前机器人准备。获取3D 图像,根据3D 图像规划椎弓根螺钉轨迹,加大伤椎矢状位头倾角,避开骨折线(图1a,1b)。根据计划的轨迹,运行Tinavi 骨科机器人,皮肤纵向切开,插入引导套管完全与骨表面接触,查看工作界面显示屏是否存在误差,若有予以微调纠正,沿引导套管的方向置入导向针(图1c)。重复上述过程,依次完成剩余导向针置入。C 形臂X 线机透视确定引导针位置,当满意后,依次置入椎弓根螺钉,透视观察椎弓根螺钉精准度(图1d,1e)。
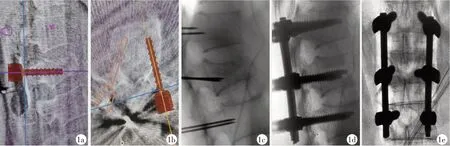
图1 患者,女,50 岁。1a,1b:机器人规划图片,规划时加大头倾角伤椎螺钉矢状位及椎体平面轨迹;1c:按机器人规划路径完成导向针置入;1d,1e:置钉完成后X 线片影像。
常规组:完成麻醉,透视下定位标记手术椎体椎弓根影。取手术椎体椎弓根影处分别切开长约2 cm皮肤切口,取穿刺针分别行椎弓根穿刺,透视正侧位见穿刺针位置满意继续进针至椎体前部,通过导针钻孔、攻丝,通过导针拧入合适规格的椎弓根螺钉,透视正侧位,观察各椎弓根螺钉情况。
1.3 评价指标
记录两组患者临床资料:包括手术时间、切口长度、术中出血量、置钉时间、住院时间及VAS 评分,行影像学检查,记录伤椎前缘相对高度及Cobb角、椎弓根螺钉置入准确率。
1.4 统计学方法
数据统计分析选用SPSS 22.0 统计学软件。计量数据以±s表示,资料呈正态分布时,两组间比较采用独立样本t检验;资料呈非正态分布时,采用秩和检验。计数资料采用x2检验。P<0.05 差异具有统计学意义。
2 结果
2.1 临床结果
所有手术顺利完成,且未出现相关并发症。两组临床结果见表1,机器人组手术时间、术中出血量显著低于常规组(P<0.05),两组切口长度、切口愈合等级、住院时间的差异均无统计学意义(P>0.05)。所有患者均获随访,随访时间6~18 个月,平均(9.5±2.4)个月,与术前相比,术后3 d 及3 个月,两组VAS 评分均显著减少(P<0.05),相应时间点,两组间VAS 评分的差异均无统计学意义(P>0.05)。
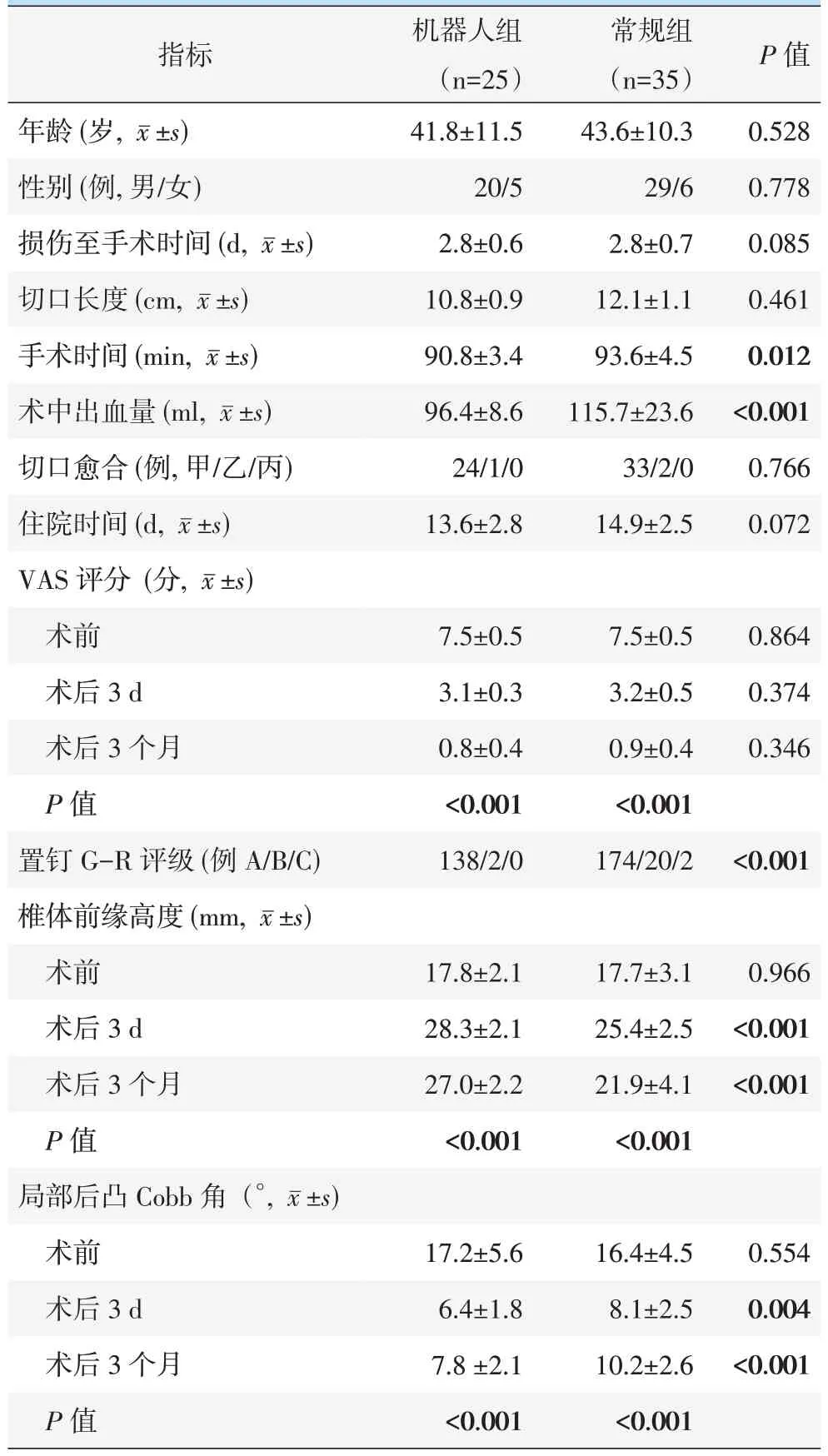
表1 两组患者临床及影像资料与比较
2.2 影像评估
两组影像评估结果见表1,根据Gertzbein-Robbins 分类[7],机器人组共置入椎弓根螺钉140 枚,常规组共置钉196 枚,机器人组置钉精准率显著优于常规组(P<0.05)。与术前相比,术后两组患者伤椎前缘相对高度均显著增加(P<0.05),局部后凸Cobb 角显著减小(P<0.05),术前两组上述影像指标的差异均无统计学意义(P>0.05),术后3 d 及3 个月,影像机器人组伤椎前缘相对高度及局部后凸Cobb 角均显著优于常规组(P<0.05),随访过程中无断钉、断棒及螺钉松动,所有伤椎均愈合。
3 讨论
椎弓根螺钉内固定术是治疗胸腰椎骨折主要方式之一,传统的术式创伤大,影响术后康复及引起相关并发症[8]。经皮椎弓根螺钉内固定技术比传统椎旁入路微创[9~11],但置钉的精准度没有得到改善。Tinavi骨科机器人导航下辅助手术为作者提供了一个解决途径。Tinavi 骨科机器人系统具有很好的灵活性和稳定性,且安全性及实用性强,自由度高,具有良好的重复性[12,13]。临床实践已经证实Tinavi 骨科机器人系统的实用性,已被用于脊柱、关节、创伤等外科[14]。
本研究通过Tinavi 骨科机器人导航下加大伤椎椎弓根螺钉置钉矢状位头倾角,在治疗上终板骨折为主的患者时,可使螺钉准确置入伤椎内相对正常的骨质,确保螺钉的力量,达到增强内固定系统稳定性的目的。术中增大了伤椎矢状面椎弓根螺钉置入的头倾角,但另两组螺钉置钉方向平行于终板,伤椎螺钉与上下螺钉之间形成了三角稳定效应[15],这样置钉不仅可以增加螺钉把持力和内固定稳定性,还成功避开了骨折线,且在机器人的导航下置钉,操作更加精准。本研究中机器人组置钉准确率明显大于常规组,术后伤椎高度恢复程度及Cobb 角改善更明显,术后疗效维持也明显优于常规组。随着机器人操作的熟练度增加,置钉的准确性得到进一步的保障,减少了手术的重复性。伤椎使用万向螺钉相比单向螺钉可更好地安装连接棒。
Tinavi 骨科机器人的局限性和术中操作注意事项:(1)Tinavi 系统的购买、使用和维护成本昂贵,收费项目未纳入医保,普及有一定困难;(2)Tinavi机器人操作者的经验对手术有不可忽视的影响;(3)手术过程中注意事项尤为重要:正确规划螺钉置入通道,如果在上关节突斜坡上选择入口点,引导套管插入过程很容易打滑,从而会产生偏差[16];插入套管前后、导针插入前后需观察电脑显示屏导航是否存在较大误差,如果有则及时调整,确保精准度。
综上所述,Tinavi 骨科机器人导航下加大伤椎椎弓根螺钉矢状位置入头倾角,治疗上终板塌陷为主的胸腰椎骨折,可使螺钉准确置入伤椎内相对正常的骨质,有效避开伤椎骨折线或骨折块,确保螺钉的力量,能取得很好临床疗效。
猜你喜欢
广东医科大学学报(2020年6期)2020-02-06
中国骨与关节杂志(2019年6期)2019-01-03
中国中西医结合影像学杂志(2018年6期)2018-12-17
中国当代医药(2017年28期)2017-11-16
中华骨与关节外科杂志(2016年6期)2016-05-17
中华骨与关节外科杂志(2016年5期)2016-05-17
山东医药(2015年38期)2015-12-07
川北医学院学报(2015年5期)2015-12-05
精准医学杂志(2015年5期)2015-05-01
卫生职业教育(2014年24期)2014-03-19
