精密结构光轮廓测量实验仪设计与应用
2024-01-01 08:27刘稳康
实验室研究与探索 2023年10期
徐 龙, 刘稳康, 毕 升, 王 健
(华中科技大学机械科学与工程学院,武汉 430074)
0 引言
光学无损检测基于光的特性进行检测,具有非接触、大面积、高精度、高灵敏度、简便高效等优点,在表面形貌测量中得到了广泛的应用[1]。结构光三维轮廓测量技术受到企业、高校及研究机构的持续关注和参与,全球专利申请随时间递增,目前依然呈现增长态势[2],高精度三维结构光的测量精度可达5 μm[3]。然而,结构光轮廓仪现有仪器主要为商业化产品,常规公差检验需求的高精度结构光轮廓仪因价格昂贵及其封闭架构,尚不能直接用于实验教学中。
为此,本文设计并搭建了一种成本较低、开放式架构的精密结构光轮廓测量实验仪,结合点云处理技术,对工业零件进行精密轮廓表征,以实现对工业零件快速高精的无损检测,同时用于实验教学,以加强工科学生的实践技能,促进结构光测量在智能制造场景中的应用。
1 结构光轮廓测量原理
通过设计快速投影条纹与相关联的图像处理算法,实现表面三维重建,如图1 所示。条纹投影测量系统的工作过程是由计算机生成灰度值按照正弦或余弦规律变化的编码条纹图,经投影仪投影到物空间后的条纹被被测物体调制变形,相机捕捉被调制的条纹,通过相机和投影仪之间的位置关系和标定参数以及条纹形变程度,结合计算机解码和三角测量方法得到变形条纹中待测物体的三维信息,能够表现出良好的重建精度。由投影仪投出的一系列条纹图案经由相机获取后,通过解调获取相位值在[-π,π]区间内变换的主值相位[4-5]。当正弦条纹投影到空间中任一待测物体表面,受物体表面形貌调制,经过相移算法处理,最后得出当前视角下待测物体表面的三维点云数据[6]。
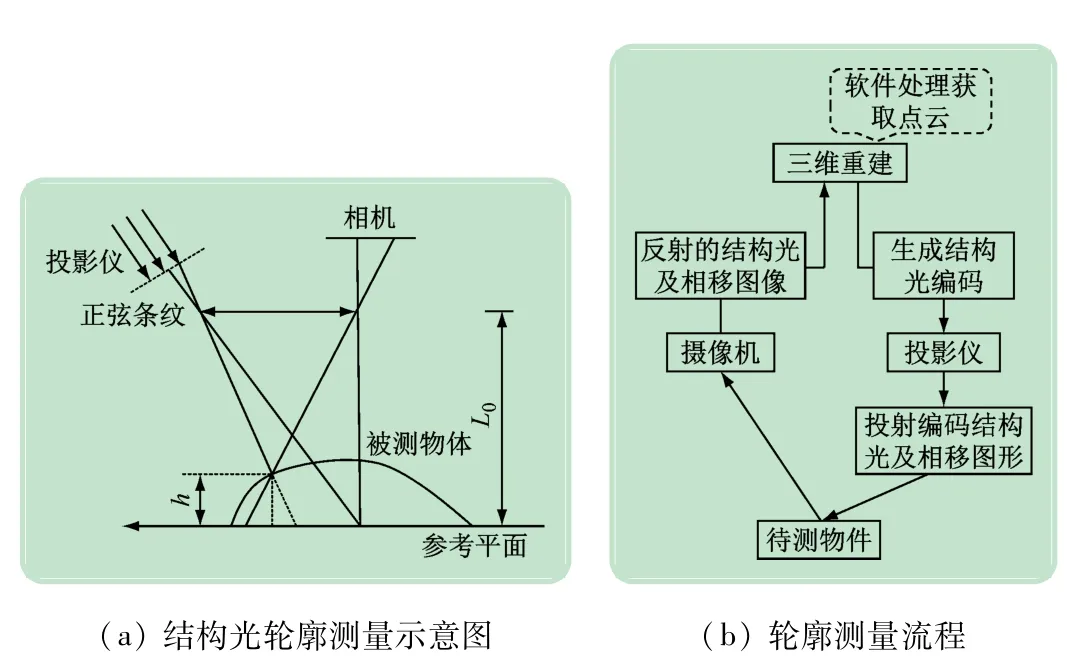
图1 结构光轮廓测量原理
(1)基于相移光栅计算相对相位。光栅相移结构光通过采集多帧具有相位变化的光栅图像来计算相位初值,当正弦光栅经投影仪投射在被测物体上时,相机视野中捕捉到的光强分布函数为[7]:
式中:m为相移步数;Im(x,y)为相机视野中(x,y)坐标上的像素值;A(x,y)为该点像素的背景灰度值;B(x,y)为光栅调制幅度;φ(x,y)为需要计算的相对相位值;δ 为相移量;M为相移总步数;Image. width 和Image.height分别为相机视野的宽和高。令m=1、2、3、4,可得如下方程:
并由式(2)中4 个方程联立求解得相位主值
由于相对相位呈周期性变化,并不能保证极线方向每个像素相位的唯一性,需要利用多个频率的光栅进行绝对相位展开,使其在水平方向具有唯一的相位值。
(2)相位解包裹求解绝对相位。在物理学中,一种频率更低的波可以由2 列频率相近的波叠加后得到[8],即相位叠加原理。把3 种不同周期(f1,f2,f3)的余弦条纹图投影到待测物体上,经反射后被相机获取,如图2 所示。由图可知,相邻两周期条纹可合成更高周期(f12,f23)的条纹,同理,可合成周期f123的条纹。其表达式为:
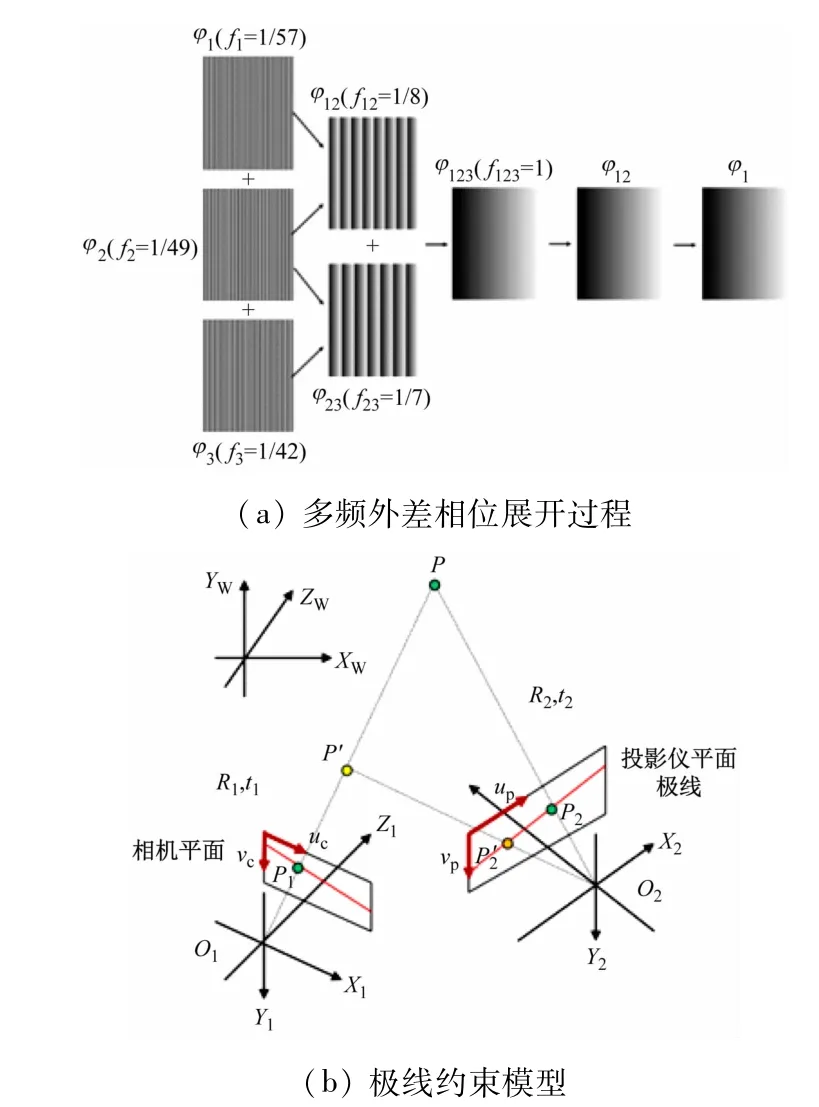
图2 多频外差相位展开过程和极线约束模型
式中:φ12和φ12分别为对应周期f12的条纹的绝对相位和相位主值;φ123(x)和φ12(x)为对应周期f123和周期f12的相位主值函数;INT(·)为向下取整函数。
由式(4)求出周期f12的条纹的绝对相位φ12,参照该方法可求出周期f1的条纹中相机平面上任意点pc(uc,vc)(相机平面点的像素坐标)的绝对相位φ1,φ1代表投影仪平面对应点pp的绝对相位,也即获取了投影仪对应点pp的up(投影仪平面点的像素坐标)。
(3)对极几何求解空间位姿。由对极几何可知,相机平面上任意点pc(uc,vc)在投影仪平面的对应点pp一定在对应的极线上,由于已经获知了pp的up,因而在极线上可快速检索以获得pp的vp。
获取了相机和投影仪的像素点对应点对pc(uc,vc)和pp(up,vp)后,通过图3 所示的立体视觉模型,可得出点对pc和pp与世界坐标P(X,Y,Z)之间的对应关系,并经三维重建可求出点的世界坐标P,对所有点重建即可获取待测物体表面的三维点云数据[9]。
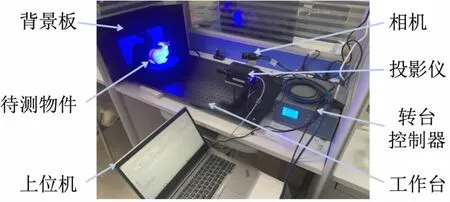
图3 精密结构光轮廓测量仪硬件系统结构实物图
2 系统硬件设计
本文设计并搭建的精密结构光轮廓测量仪硬件系统,如图3 所示。该系统由结构光轮廓仪(由1 台投影仪和1 台相机组成)、1 个步进电动机驱动的旋转工作台(以下简称转台)、4 个转台控制器以及上位机4 部分组成。系统的整体结构如图3 所示。
投影仪选用DLP LIGHTCRAFTER 4500 投影仪,可实现同步触发,能将预先生成的光栅条纹投影到被测物体表面,分辨率可达912 ×1 140,焦距在364 ~2 169 mm之间可调。相机系统选用CMOS相机,分辨率为1 280 ×1 024,单点像素大小为4.8 μm,该相机以满分辨率拍摄图像达170 f/s,可满足快速测量的标准。转台选用Y200RA60 转台,其行程为360°,满足获取整体点云的行程要求,重复点位精度可达0.005°,符合精度要求。
本文将转台、结构光轮廓仪固定于精密面包板上,以保证整个仪器系统的鲁棒性;黑色背景板用于降低环境元素对测量过程的影响;单个结构光轮廓仪只能测量得到物体的局部点云数据[10],为得到完整的物体表面三维信息,在系统中引入了基于转台的三维拼接方法[11]。该方法通过上位机控制待测物件的旋转角度(角度的选取参考待测物体的表面几何结构特征),获取待测物件多个视场下的点云数据;经计算多视点云间的变换矩阵;最后对不同视场的数据点云进数据拼接,获得完整的物体表面三维点云数据,以供后续点云处理。
3 软件系统设计
在上述硬件系统基础上,开发并集成配套软件系统以驱动其获取点云数据,并进行后续数据处理。整个软件系统分为点云获取和点云处理两个部分。
(1)点云获取。点云获取软件是基于结构光轮廓测量原理,对得到的待测表面数据进行处理,最终三维重建获取其点云数据,其运算界面如图4 所示。图中,左面部分为参数设置部分,右面部分为点云显示窗口。
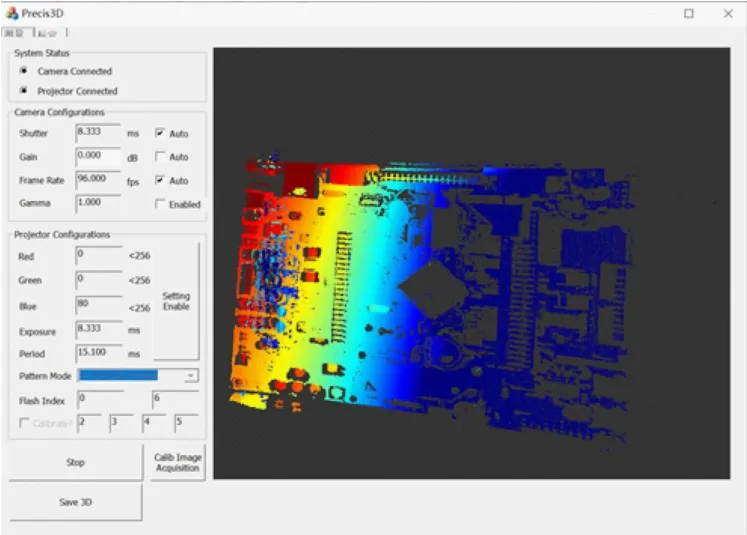
图4 点云获取软件界面
(2)点云处理。点云处理软件对获取的点云数据通过点云滤波、感兴趣区域(Region Of Interest,ROI)提取、点云降采样、点云聚类分割、点云平面拟合、边缘提取等算法[12]逐次处理,实现待测区域的高精形貌表征,其软件界面如图5 所示。

图5 点云处理软件界面
4 实验设计
实验时将待测物体放置于转台上,通过软硬件融合,对待测表面进行结构光条纹投影,获取局部点云;通过上位机控制转台转动,获取多组不同位姿的点云;进一步采用上位机算法实现对多组点云的拼接[13],得到最终点云数据。该点云数据经算法处理得到待测区域特征参数,与被测物实际参数对比,可检验该仪器性能,具体实验流程如图6 所示。
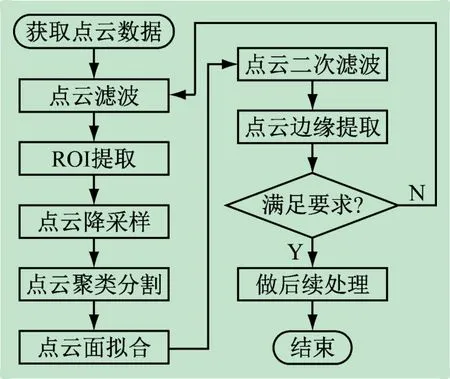
图6 实验基本流程
(1)点云滤波。为去除点云中离群点和噪点,本文在后续处理前设置有点云滤波模块,该模块设有统计滤波、双边滤波、半径滤波3 种滤波手段[14]:①统计滤波设置有h和std2 个阈值参数,当某点临近h个点的平均距离在标准范围内时保留该点,不在该范围内则认为是离群点并删除。②双边滤波为默认设置参数。③半径滤波设置有圆圈半径和圆圈内点的个数n等参数,当该点半径区域内存在n以下的点,该点被去除。
(2)ROI提取。经点云滤波后,本文设置长方形包围框将感兴趣区域提取出来,将包围框外点云去除,以减少后续计算量。
(3)点云降采样。点云降采样为分割前的关键步骤,用于降低感兴趣区域的点云密度,同时不丢失关键特征信息。该模块设有随机k点降采样、随机比率降采样、随机半径域降采样3 种降采样手段:①随机k点降采样设置有参数num,表示每随机num 个点仅保留1 个点;②随机比率降采样设置有参数ratio(0% ~100%),表示整个点云集里随机采集ratio 比率的点,其余点去除;③随机半径域降采样设置有半径1 个参数,表示该半径域内只保留1 个点,其余点去除。
(4)点云面拟合。点云面拟合采用RANSAC 最小二乘拟合算法,去除待测区域内元件平面外的其他点云数据,为后续边缘提取提供元件轮廓数据[15]。
(5)点云边缘提取。获取待测元件点云后,将待测点云投影于拟合平面,得到映射高度图像,并经图像反转、边缘提取(Canny 算子、Sobel 算子)、平滑边缘、填充孔洞和连通域分块等处理[16]获得初步处理结果。
(6)待测参数表征。对待测结果表征其特征参数,对于本文拟选的被测元件,主要表征其面积,边长,并与实际参数作误差分析。
5 实验及结果分析
本文拟以工业电路板作为待测物体,如图7 所示。实验将对图中红色区域芯片(其实际边长为21 mm)进行参数表征,并作误差分析。

图7 待测电路板和待测芯片(红色区域)
(1)测量精度分析。将该电路板以6 种位姿放置,获取不同点云,并对待测芯片表面作参数表征和误差分析,其结果如图8 所示。
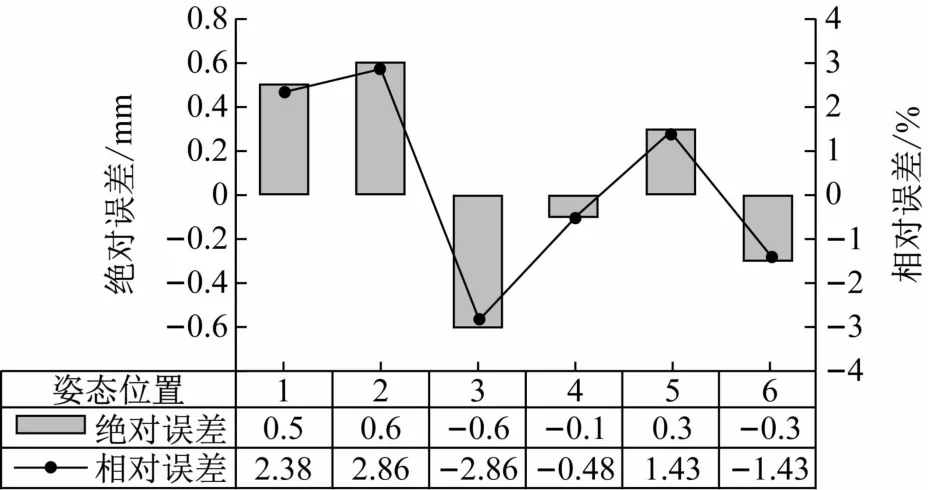
图8 不同点云同一芯片边长的精度分析
(2)重复精度分析。对其中1 个位姿分别作6 次点云获取及处理,并对其芯片表面作参数表征和误差分析,其结果如图9 所示。由图可知,该仪器的测量相对误差<3%,测量重复性误差<2.5%,达到对待测表面的精密表征。
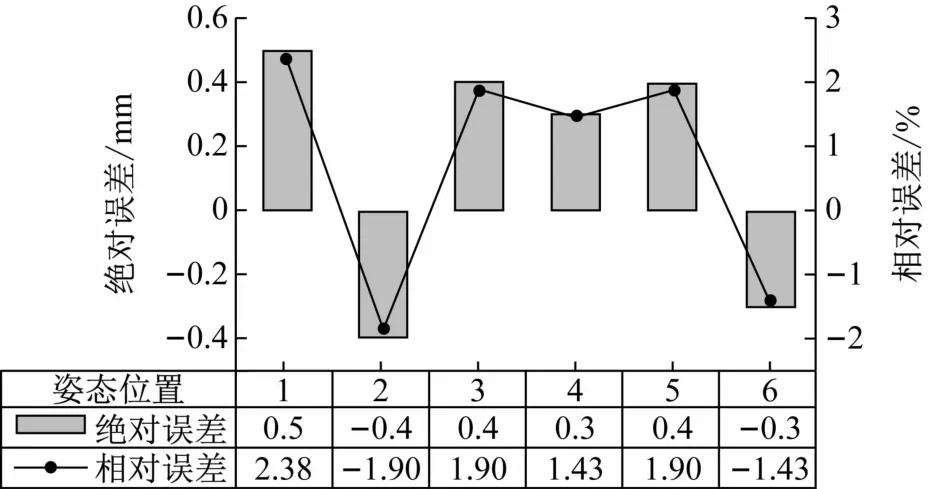
图9 同一点云芯片边长重复表征的精度分析
6 结语
本文设计并搭建了精密结构光轮廓测量仪,并进行了应用实验验证。结果表明:系统的测量相对误差<3%,测量重复性误差<2.5%。该系统提供通用的点云处理模块,可针对不同工业零件,选择相应的处理参数进行测量,实现表面的非接触、高效和准确的表征。
该仪器可自定参数的开放式架构,可用于高校新工科实验教学,并提高学生精密测量仪器的设计能力。
·名人名言·
知识是一座宝库,而实践则是开启宝库的钥匙。
——托马斯·富勒
猜你喜欢
故事作文·高年级(2021年11期)2021-11-28
装备制造技术(2020年1期)2020-12-25
发明与创新(2020年46期)2020-12-24
发明与创新·中学生(2020年12期)2020-01-11
制造技术与机床(2019年11期)2019-12-04
小福尔摩斯(2019年2期)2019-09-10
小学生必读(低年级版)(2019年9期)2019-04-13
小学生必读(低年级版)(2019年10期)2019-04-13
课程教育研究·新教师教学(2015年5期)2017-09-27
计算机工程(2015年4期)2015-07-05