航空发动机压气机压力仿真实验教学平台设计
2024-01-01 08:27林忠麟甘锦裕刘文超张天宏
实验室研究与探索 2023年10期
林忠麟, 甘锦裕, 刘文超, 张天宏, 黄 峰
(1.福州大学机械工程及自动化学院,福州 350108;2.南京航空航天大学能源与动力学院,南京 210016)
0 引言
航空发动机是现代飞机的核心部件,其压气机是发动机中最重要的部分,用于将外部空气压缩并送入燃烧室,以提供燃料燃烧所需的高压力空气。发动机性能的优劣主要取决于压气机的效率和可靠性[1-2]。压气机在运行过程中易受多种因素影响,导致工作参数变化引发喘振和失速等失稳现象[3]。为更好地评估发动机的性能,对压气机压力失稳现象进行检测非常重要[4-6]。压气机的压力模拟为航空发动机设计提供了极大的便捷,可在发动机硬件在环仿真阶段快速评估压气机的性能、优化发动机设计以及进行发动机性能评估和验证。压气机压力模拟还可用于故障排除和优化维护策略的设计[7]。
随着国家对航空发动机和燃气轮机重大专项的启动,对压气机失稳问题的自主创新研究需求愈发迫切,对开展多维度创新教学模式提出了更高的挑战[8-10]。本文开发了一套航空发动机压气机压力硬件在环仿真实验教学平台,该实验平台将航空发动机及机械工程专业的工程问题与实验教学相结合,可提高学生理论与实践相结合、培养新一代航空发动机及机械工程领域创新型人才;能模拟压气机压力变化、复现气流突变特征,为航空发动机硬件在环仿真试验提供必要的条件和基础。实验验证,该实验平台能够精确地模拟航空发动机压气机的压力变化,成本低,置信度高。平台软件界面设计美观简洁、操作难度低、易于学生上手操作,可为实验教学、毕业设计等提供基础,是使用硬件在环仿真技术替代传统教学方法的一大创新。
1 仿真平台工作原理
1.1 压力模拟原理
气动伺服控制中,压力控制是最基本的环节[11]。所谓压力控制,是指在一定的气压范围内,通过对气压信号的实时检测与分析,实现对被控容器中气体压力的自动调整。气压伺服控制的核心在于控制算法的设计,传统的气压控制算法主要有比例积分微分(Proportional Integral Derivative,PID)、滑模控制(Sliding Mode Control,SMC)和模型预测控制(Model Predictive Control,MPC)等。PID控制原理简单,但在气压伺服控制中效果较差。SMC 虽其模式切换的方法适用于气动系统,但容易出现过大误差。本平台采用MPC作为压力模拟的核心控制算法,其更适用于非线性系统。MPC是一种基于模型的新型控制算法,具有良好的鲁棒性、可控性和快速动态响应。模型预测控制通过对工业生产过程的最优控制来优化系统品质,其核心在于预测和滚动优化算法。MPC 算法设计是以硬件在环仿真平台的实际情况为约束条件、以高速开关阀压力数据模型为预测模型,所用的性能指标函数
式中:u为控制量;k为采样时刻;i为预测时刻;k+i为预测时刻,所对应步长为1 ms;N为总预测步数;R、C、F分别为误差、控制量、终点加权参数;Pref为参考压力,PG为预测压力。
平台采用定容积控制的气压伺服控制技术,以调节气动系统中气缸内的压力作为压气机的模拟压力,原理如图1 所示。航空发动机硬件在环仿真试验中,由发动机模型计算机输出压气机压力仿真信号,该信号作为实验仿真的输入,经过MPC计算后输出控制量控制气动系统产生压力变化,形成压气机压力信号,该信号将由全权限数字发动机控制器(Full Authority Digital Engine Control,FADEC)中的压力传感器进行采集,FADEC 产生的控制信号馈送给航空发动机模型,形成控制闭环。

图1 压气机压力模拟原理图
1.2 FPGA技术特点
现场可编程门阵列(Field Programmable Gate Array,FPGA)是一种设计灵活、功耗低、体积小、可编程性强,并具有较高可靠性和可重复使用的集成电路技术。FPGA具有可编程特性,可根据用户需求在任意时刻设计出电路,并且可用软件在芯片上实现设计的功能[12-14]。利用FPGA 技术高度并行性、易于可编程性、灵活拓展性等特点[15-16],结合气压伺服控制技术与MPC算法,实现精准的时序控制,提高平台的仿真控制精度,以完成实验平台的气动伺服控制功能。
2 仿真平台软硬件构建
2.1 平台硬件设计
仿真平台硬件部分如图2 所示,构建遵循标准化、模块化和简易化的原则,采用搭载FPGA 的高性能嵌入式实时控制器,通过电缆与PC、气动系统连接,进行数据传输,实现对被控气缸中的压力调节。整套平台具备高性能、低成本、结构紧凑、兼容性好、易于维护的特点。
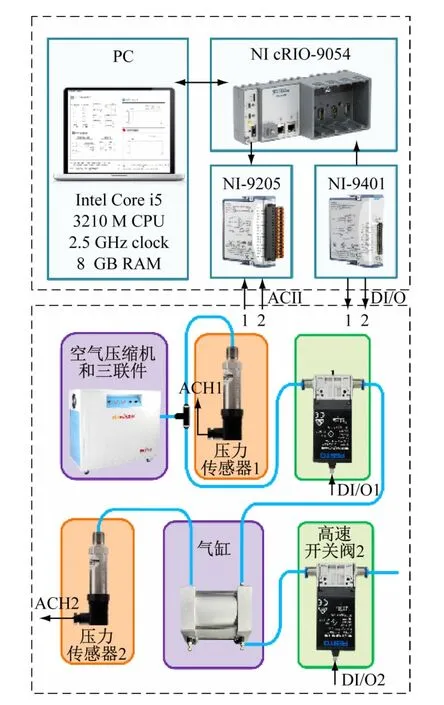
图2 压气机压力仿真教学实验平台硬件
(1)气动模块。气动模块是本平台的基本部分,本着结构简单、易于控制的设计原则,本平台的设计包括空气压缩机(TW7504S)、高速开关阀(MHJ10-S-0,35-QS-4-MF)和气缸。
气动系统中常用的压力调节执行器为比例阀和高速开关阀。尽管比例阀有着比例输出的优点,但其较复杂的结构和较高的成本限制了使用的范围。高速开关阀结构简单,响应快,易于控制,更适用于本平台的设计。高速开关阀仅有“开”和“关”两种状态,结合脉冲宽度调制(Pulse-width Modulation,PWM)方法便可以轻松对其控制。故本平台采用MHJ10-S-0,35-QS-4-MF型高速开关阀,压力范围为0.05 ~0.6 MPa,最大切换频率可达1 kHz,范围广,响应快。空气压缩机采用TW7504S,采用一体化静音设计,安全可靠,操作简单,适合实验室使用,方便实验教学。
(2)控制模块。航空发动机压气机压力因其压力突变、幅值较大、变化复杂等特点,对仿真平台的控制模块提出了更高的要求,需实现高精度、高频响的压力调节。本平台采用CompactRIO(cRIO)嵌入式实时控制器cRIO-9054。cRIO-9054 配备1.33 GHz 的Intel Atom双核处理器、Artix 7 100T的FPGA架构以及4 个C系列模块插槽。cRIO-9054 提供了精确的同步定时和确定性通信,适用分布式数据采集和控制应用。
本平台cRIO-9054 配备了2 张数据采集卡,分别是C系列数字模块NI-9401 和电压输入模块NI-9205。NI-9401 为双向数字模块,配有8 个DI/O 通道,本平台用以输出PWM控制量以调节高速开关阀。NI-9205为高精度、高速度模拟信号输入模块,电压范围为±10 V,适用于平台传感器的数据传输。
(3)传感模块。传感模块是伺服控制系统中必不可少的一部分,是实现闭环控制的重要反馈条件。压力传感器选用MIK-P300,其压力敏感核心采用了高性能的硅压阻式压力充油芯体,内部的专用集成电路将传感器mV级信号转换为标准电压、电流或频率信号,可变送-0.1 ~0.6 MPa 的压力。该传感器因其重量轻、精度高、安装方便等特点被广泛应用于航空航天、实验室压力校验等。
2.2 平台软件设计
平台软件采用LabVIEW 编程环境进行开发。LabVIEW作为一款虚拟仪器产品,以图形为编程语言,通过其丰富的控件,用户可快速地创建虚拟仪器,实现对实验过程的控制,并可通过LabVIEW开发软件进行数据分析、显示和处理。
本平台的软件设置,则由上层PC 与底层cRIO-9054 Real-Time(RT)、cRIO-9054 FPGA 组成,即HOST.vi、RT.vi与FPGA.vi。各层子程序的任务架构如图3 所示。仿真平台的相关程序设计和部署在NI LabVIEW 2019、LabVIEW Real-Time 19.0、LabVIEW FPGA 19.0 及NI cRIO driver 19.0。
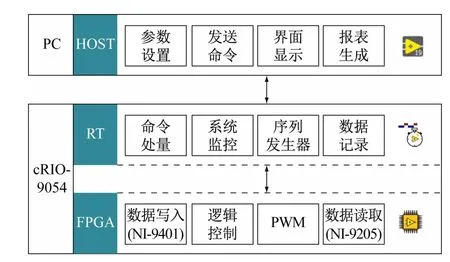
图3 HOST、RT、FPGA分层任务架构
(1)下位机程序。cRIO-9054 Real-Time 运行的FPGA.vi作为底层的开关阀脉冲生成驱动程序,具有较强的实时性,负责信号采集、逻辑控制、高速并行处理。该程序利用NI-9205 读取压力传感器实时采集的进气压力和腔内压力;利用NI-9401 对开关阀组进行控制,采用PWM 技术,分别设置控制频率、偏置和占空比进行独立控制。
RT层作为实时通信模块,其程序负责传递变量、处理命令,同时对所采集到的数据进行监控、处理。利用MPC方法,对系统参数进行实时计算,以实现最优控制。
(2)上位机程序。上位机程序HOST. vi 遵循人机友好、界面简洁、操作方便的原则进行设计,分为系统参数设置、MPC参数设置和实时监测3 个模块。该程序操作流程如图4 所示,主要有:参数设置→设置参考压力→开启阀→数据导出→关闭阀并放气。

图4 仿真平台(HOST.vi)操作流程
系统参数设置开关阀频率为100 Hz、采集循环时间为1 ms,MPC参数依据实际情况确定,参考压力设置为主动数值设置与预设波形设置,预设波形包括正弦波、三角波与喘振信号。参数设置界面如图5 所示。上位机程序通过RT层实现与FPGA层的通信,确保采样和控制输出的定时精度。
平台实时监测模块由实时压力跟踪监测和实时误差监测两部分组成,如图6 所示。该模块用于直观了解平台状态,方便及时对平台进行调整。
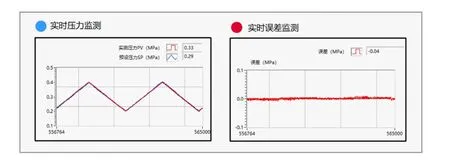
图6 仿真平台(HOST.vi)实时监测界面
3 实验验证
3.1 实验方法
(1)前期准备。依据图2 的实验平台硬件图对各部件按顺序进行连接。其中,气动系统使用直径为4、6 和8 mm规格气管,并使用气管转换器进行连接。各传感器使用电线缆与cRIO-9054 连接。NI-9401 与NI-9205 分别插入控制器的槽1与槽2;压力传感器1与压力传感器2 电气输出端分别连接NI 9205 的接入信道(Access Channel,ACH)ACH 1 与ACH 2,用以测量气缸输入压力与腔内压力;NI 9401 的DI/O 1 与DI/O 2输出端分别连接高速开关阀1 和2,用以控制进气阀与放气阀的开关。
(2)实验操作。调节空气压缩机输出压力为0.6 MPa,依据图4 操作流程分别进行实验,本实验包括正弦波、三角波与喘振信号跟踪3 部分。实验过程中可根据实际跟踪情况对MPC参数进行设置,以达到更好的跟踪效果。
(3)数据分析。分别导出各组实验的数据,并对每组实验数据进行分析。
(4)注意事项。实验结束后须保证空气压缩机与气缸内释放结束,并检查完各项电源安全才可离开。
3.2 数据分析与实验结果
本实验包括正弦波、三角波和喘振信号跟踪3 组实验,实验数据如图7 所示,图中p为压力,pm为实测压力,e为压力误差,t为时间。
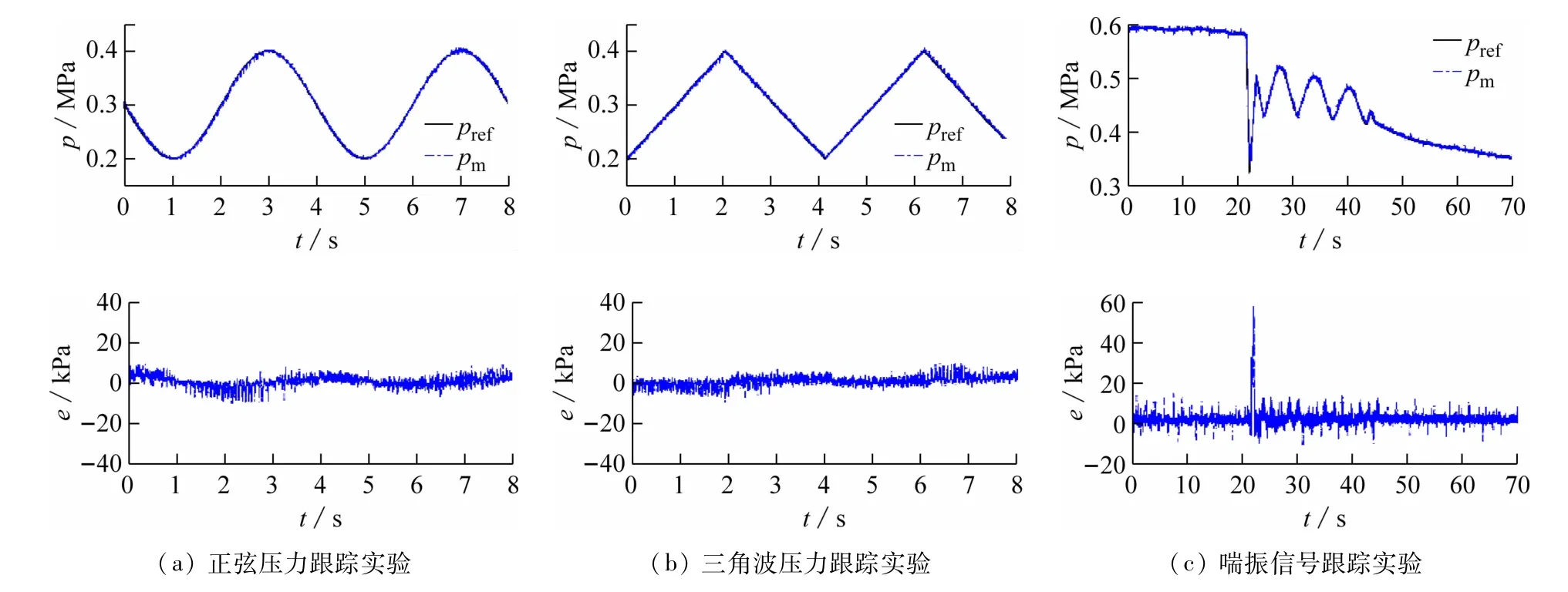
图7 喘振信号跟踪实验结果
基于实验数据可以得出以下结论:
(1)仿真平台能及时根据预设压力的变化,快速对开关阀组进行控制。
(2)正弦波与三角波压力跟踪误差均保持在10 kPa内,误差比(误差/预设值)基本保持在2.5%内,跟踪性能佳。
(3)喘振信号跟踪结果整体与喘振信号一致,除第1 次高幅度压力突降时,实时误差最大接近60 kPa,但最终能够快速跟随上压力变化,补偿低压缺额。
综上所述,本文所设计的基于FPGA 的航空发动机压气机压力硬件在环仿真实验教学平台能满足压气机压力模拟需求,误差小、跟踪平稳、反应快速。
4 结语
本文设计的高精度的航空发动机压气机压力硬件在环仿真实验教学平台基于FPGA技术与气动压力模拟技术,具有界面简洁、人机友好、操作方便等特点。平台不仅能弥补航空动力专业相关课程实验教学的不足,也可服务于发动机性能测试任务。该实验平台提供了一个真实的仿真环境,能够有效提高学生理论与实践相结合的能力。通过该平台的使用,学生可充分了解压气机压力硬件在环仿真实验的原理、过程和技术,并在实验中掌握相关的数据采集、分析和处理方法。该平台采用了FPGA 技术,具有高度的可编程性和灵活性,能满足不同实验的需求,帮助学生更好地掌握航空发动机测试与故障检测的知识。该平台设计的人机交互界面简洁易懂,操作方便,能帮助学生快速上手,对于激发航空发动机、机械工程等相关专业学生的科研兴趣,扩大与丰富学术视野具有重要意义。
猜你喜欢
天然气与石油(2022年4期)2022-09-21
燃气涡轮试验与研究(2021年4期)2022-01-18
北京航空航天大学学报(2021年6期)2021-07-20
航空发动机(2021年1期)2021-05-22
趣味(作文与阅读)(2021年11期)2021-03-09
趣味(语文)(2021年11期)2021-03-09
航空发动机(2020年3期)2020-07-24
测控技术(2018年9期)2018-11-25
IT时代周刊(2015年7期)2015-11-11
燃气轮机技术(2014年4期)2014-04-16