
基于飞轮储能的直流微电网虚拟惯量自适应控制策略
2023-12-30 01:26:44宋玲燕赵兴勇高兰香王雨祺刘昊炀
电气自动化 2023年6期
宋玲燕, 赵兴勇, 高兰香, 王雨祺, 刘昊炀
(山西大学 电力与建筑学院,山西 太原 030013)
0 引 言
大规模光伏并网导致电网惯量降低,在一定程度上限制了光伏的发展,国内外学者利用储能快速充放电能力为系统提供惯性支持[1]。飞轮储能系统(flywheel energy storage system,FESS)凭借高功率密度、响应速度快、易于检测放电深度和使用寿命长等优势被广泛应用[2]。
目前,PI反馈控制在FESS放电过程普遍使用。文献[3]引入负载功率和电流前馈补偿值于电压闭环控制,以消除功率突变的影响。文献[4]采用前馈补偿方式对负载电流进行补偿,提高了系统的稳定性,但需要增设电流传感器。因PI未激发潜在惯性,在储能系统中施加改进下垂控制,即在下垂系数中引入电压微分量[5]。文献[6]120提出动态虚拟惯量控制策略,引入反正切函数实现下垂系数自适应,但其对参数变化较为敏感,暂态响应持续时间长。文献[7]在上述控制基础上导入双曲正切函数,相比反正切函数在电压变化率较大时有更好的收敛速度。变截距相比于变系数控制,调整方向易于判断,且调整量与虚拟电容的关系更为简单。文献[8]基于电压变化率来调节下垂曲线的截距,但当功率变化较大时,收敛性较差。
针对以上问题,本文基于飞轮储能现有控制,提出一种下垂曲线纵截距自适应的虚拟惯量控制策略,优化储能虚拟惯量出力为系统提供惯性支撑。最后在MATLAB中建立仿真模型,将改进下垂虚拟惯量控制与传统控制进行对比,验证所提方法的有效性。
1 直流微电网虚拟惯性分析
1.1 飞轮储能系统的惯性分析
FESS利用高速旋转的飞轮质体进行能量储存。其动能EF为:
(1)
式中:JF为转子的转动惯量;ωf为转子旋转角速度。
由FESS转子转速改变引起的输出电功率变化为:
(2)
当系统直流侧发生功率失衡,直流侧电容充放电功率为:
(3)
式中:Pr、Ps分别为直流电容C出入口侧功率;Pc、Udc分别为流入C的功率和直流电压。
负载波动瞬间,由FESS供给C充放电功率,不计及损耗,则直流母线电压变化转化为转速波动。由式(2)和式(3)可得:
(4)
对式(4)两侧进行积分,并取FESS在变换后时刻额定电压值下的转速ωf1为额定转速进行标幺化,可得:
(5)
式中:ωf1_pu、ωf0_pu分别为FESS变换后和初始时转子角速度标幺值;EC为UN下电容存储的电能。由于EC=EF,因此在电压发生变化时,飞轮转速没有显著变化。故采取附加惯量控制作用于飞轮,使其在原有基础上提升转速变化,优化储能的虚拟惯量出力。
1.2 直流微电网虚拟惯性分析
当直流微电网受到扰动,FESS在附加惯量控制下快速充放电为系统提供惯性支撑,在直流侧虚拟出一较大的电容,即Cvir,并使功率源提供辅助功率ΔPs来降低电压改变速度。
(6)

在负载输出功率波动ΔPr时,有:
(7)
由式(3)和式(6)可得:
(8)
附加虚拟惯量控制后,直流侧的电容值由C增加至C+Cvir,系统的惯性时间常数Hdc_microgrid变为[6]118:
(9)
式中:Wki为并联电容Ci储存的能量;SNci为Ci的容量基值;U为直流侧电压值;Cvir_i为参与控制的第i个转换器的虚拟电容值。由式(9)可知Hdc_microgrid正比于直流侧电容,故附加惯性控制之后,Hdc_microgrid变大。
2 自适应虚拟惯量控制策略
2.1 基于调整下垂曲线截距的虚拟惯量控制
当FESS采用下垂控制时,有:
(10)
式中:Uref为纵截距;1/k为下垂系数。
下垂控制不能反映FESS对于电压变化的灵敏,也不能提供惯性。故提出通过调节Uref来控制变流器的输出功率,实现虚拟惯性控制。原理图如图1所示。
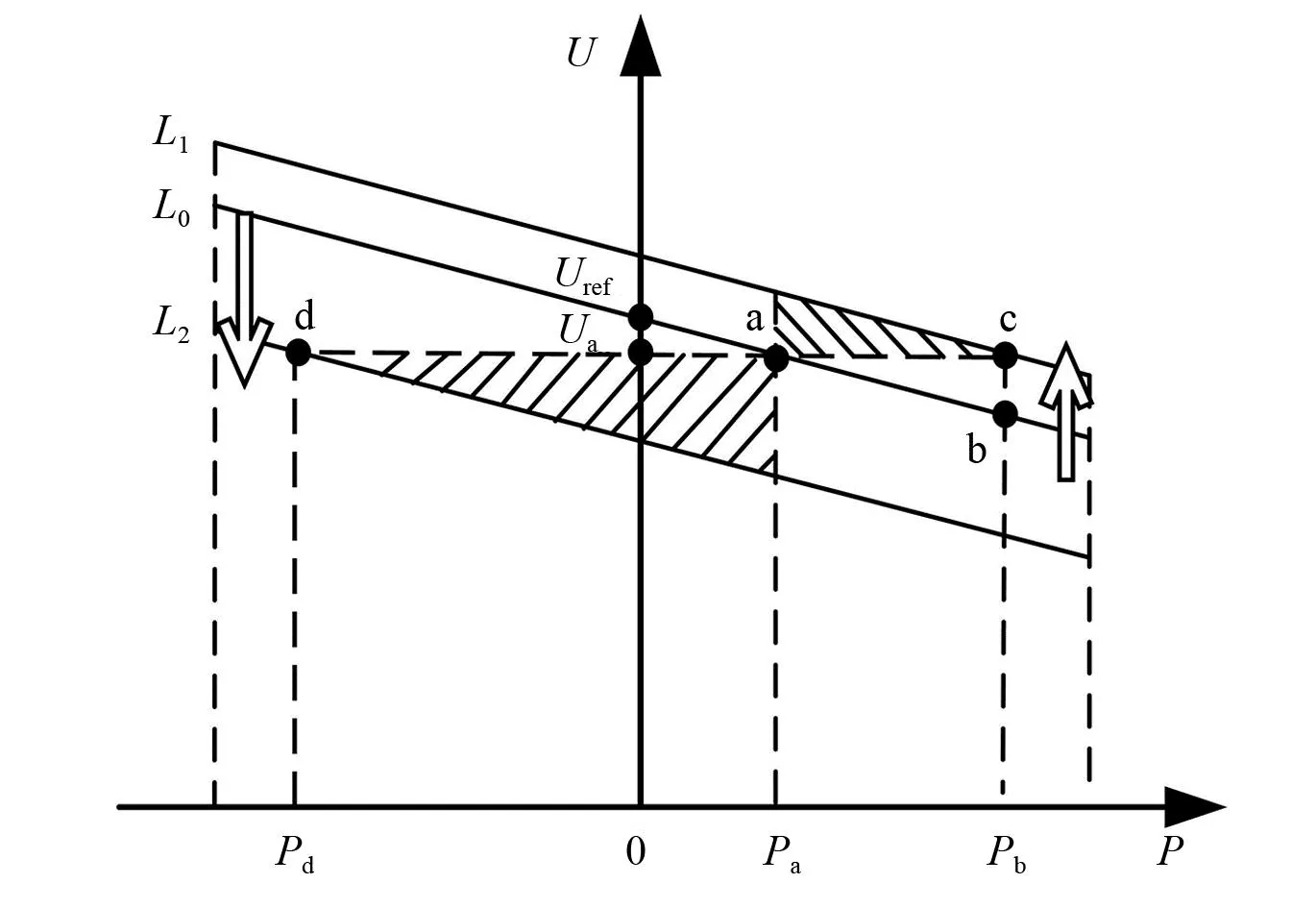
图1 下垂曲线截距调整
图1中:a为初始点,当负荷增加至Pb,检测到Udc低于期望值,增大Uref使变流器输出辅助功率,延缓Udc的降低速度;反之亦然。可得,截距的调节量ΔUref与变流器输出功率的改变量之间存在线性关联。
令ΔUref随电压变化率dU/dt线性变化,可得:
(11)
式中:Uref0为初始时的截距;kd为调节参数,且kd>0。

(12)
由式(6)和式(12)得:
(13)
Uref随dU/dt反向线性控制为Cvir恒定的虚拟惯性控制,并且kd愈大,Cvir愈大。
2.2 自适应虚拟惯量控制
式(11)中一次函数下垂曲线截距调整算法,调节参数kd恒定,实际情况下的灵活运用无法实现。设计ΔUref关于dU/dt过原点的非线性函数。在双曲正切函数中嵌套幂函数,改进算法为:
(14)
式中:Uref.max、Uref.min分别为Uref的最大和最小值;k1、k2分别为虚拟惯性调节参数。
由式(14)得,利用嵌套函数对Uref进行调整,具有一定的自适应能力,当k改变时,Uref变化如图2所示。
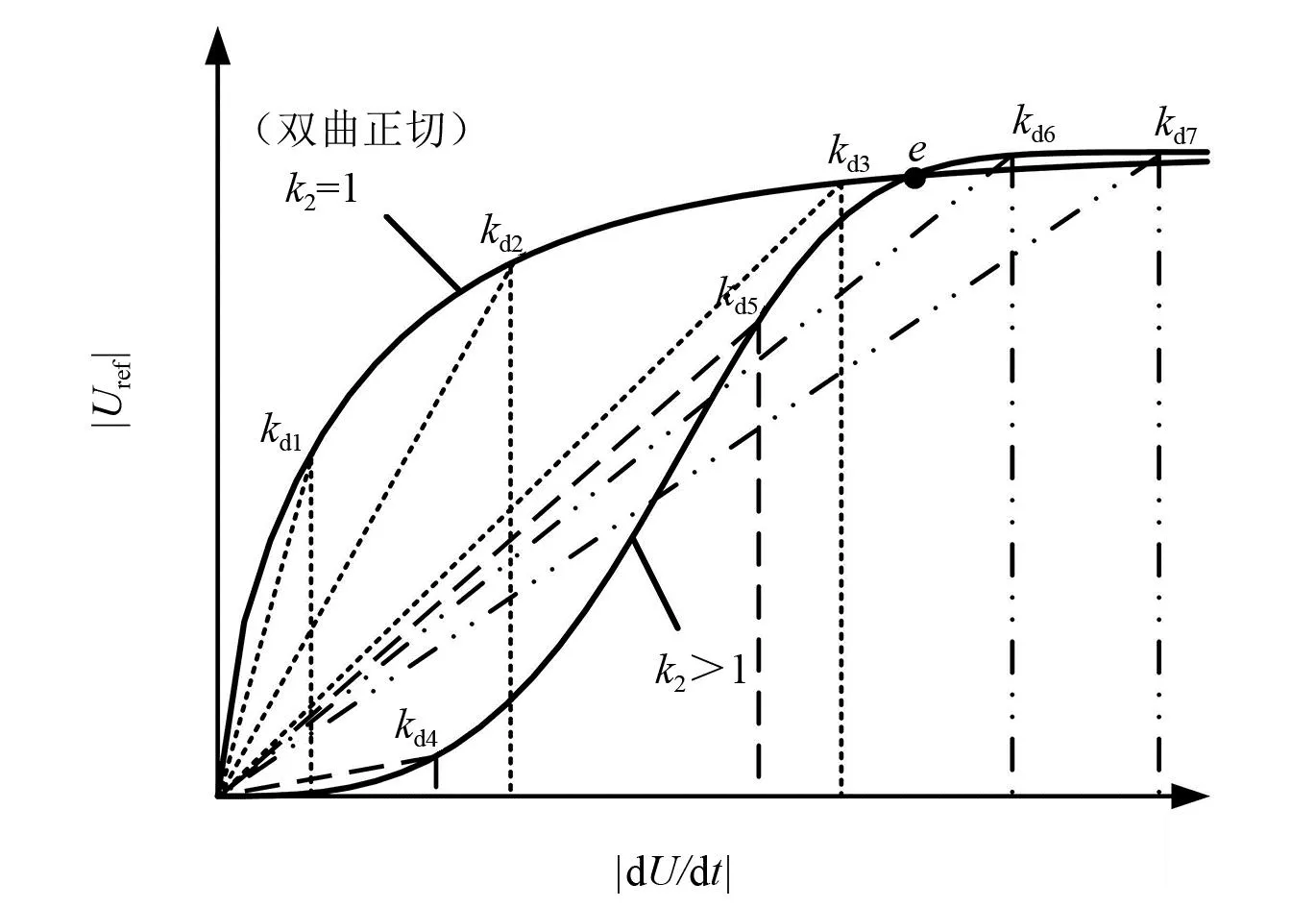
图2 自适应虚拟惯性特性曲线
图2给出2条函数曲线,作曲线过原点的割线,割线斜率kd可代表Cvir的大小。
当k2=1,随着|dU/dt|的增大,有kd3
由以上分析可知,FESS释放或吸收的功率越大,母线的稳压效果越强,但受飞轮转速限制,其释放的最大功率为:
(15)
同理,Uref的限制范围如图3所示。

图3 下垂曲线截距调整范围
FESS在扰动时供给辅助功率,受其转速限制,下垂曲线最高可上升至Lhigh,由于1/k恒定,Uref.max为:
(16)
同理,下垂曲线最低可平移至Llow,Uref.min为:
(17)
2.3 飞轮储能控制系统的实现
附加控制环节作用于FESS外环,与传统PI控制协同作用下使双向AC/DC变流器F-VSC表现出同步发电机的惯量特性。当系统受到扰动时,δU≠0,在附加控制作用下ΔUref向δU的反方向调节,由式(14)计算得到新的下垂曲线截距Uref,再由P-U下垂特性求得此刻变流器输出功率参考值Pref-F,随后对式(2)进行拉氏变换得出飞轮储能的角速度参考值ωref-F,然后利用PI控制生成电流内环参考值,其内环采用isd=0的矢量控制。具体控制如图4所示。
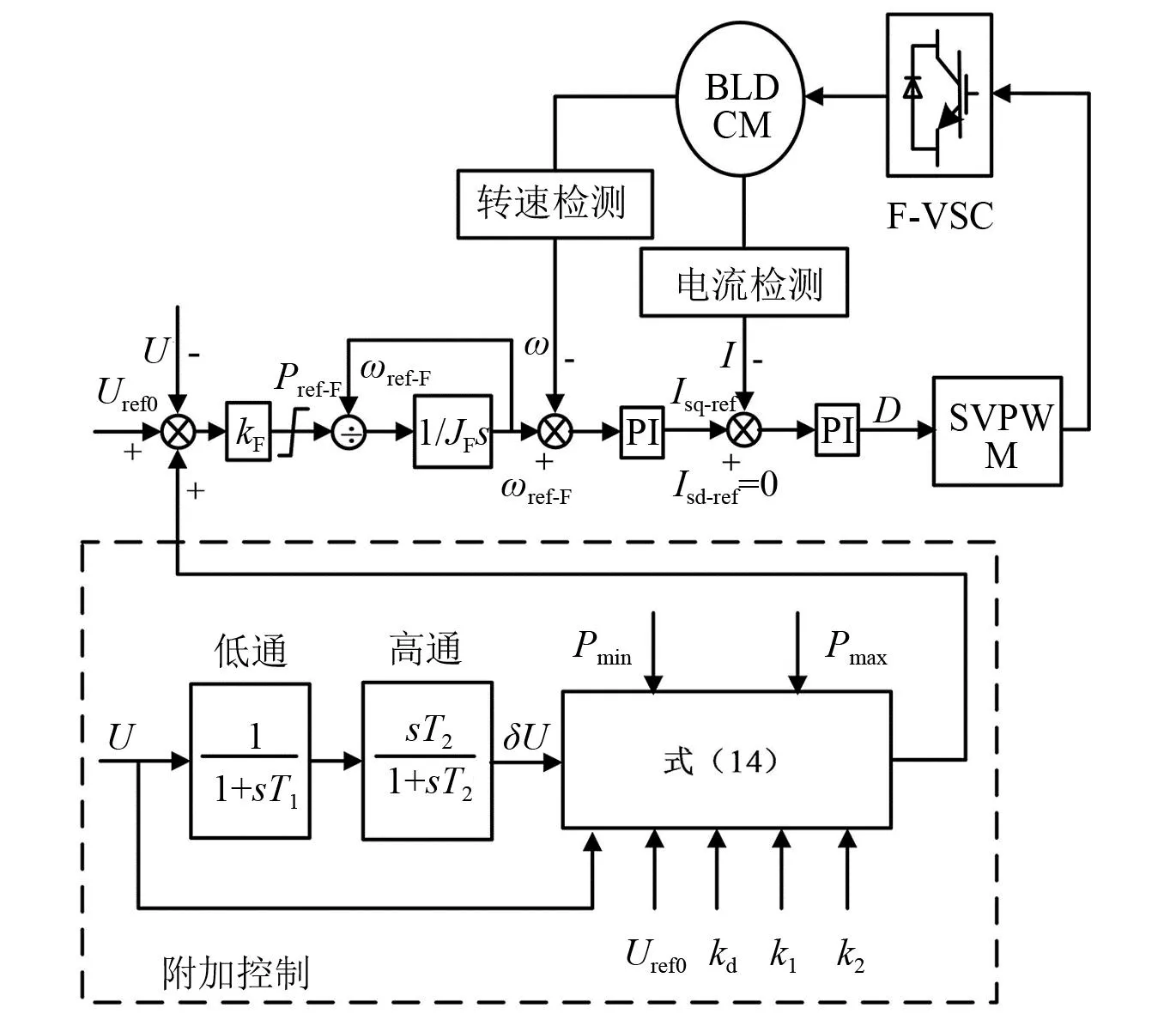
图4 F-VSC控制框图
3 仿真分析
采用MATLAB搭建如图5所示的系统仿真模型,并将本文所提的控制算法运用于模型当中,主要参数如表1所示。
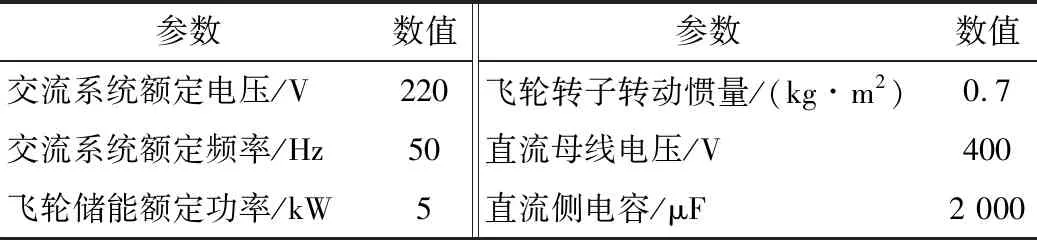
表1 直流微电网仿真主要参数
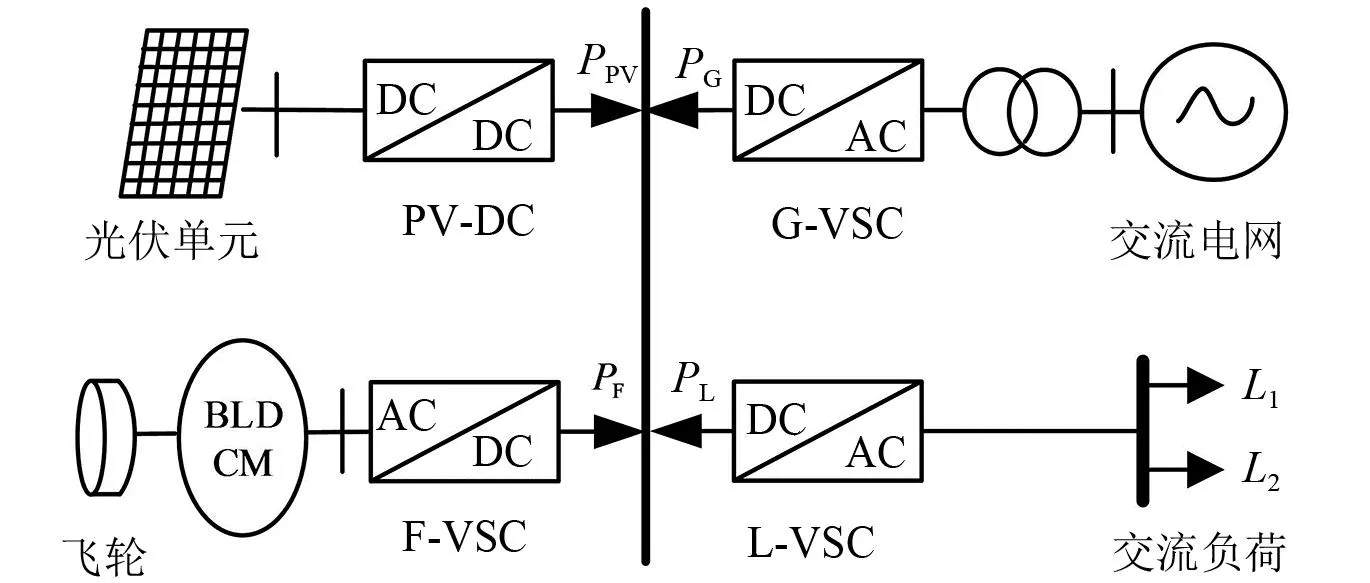
图5 直流微电网拓扑结构
初始时刻,光伏输出功率PPV=15 kW,交流负荷PLoad=13 kW,Udc维持在400.04 V;t=1 s时,负荷突增至23 kW,大约经过0.5 s后母线电压进入稳态。
F-VSC分别采用无虚拟惯性控制,传统虚拟惯性控制和自适应虚拟惯性控制,仿真对比母线电压Udc和储能输出功率PF变化。波形如图6所示。
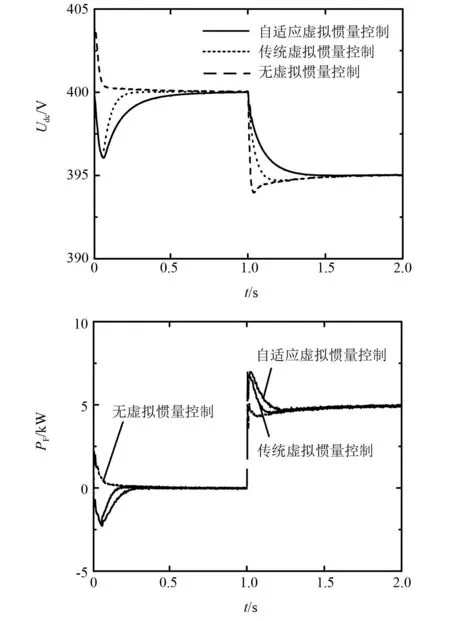
图6 仿真结果对比图
通过仿真得到系统在各种控制方式下暂态响应各项指标,如表2所示。

表2 不同控制方式下暂态响应测试结果
从图7可知,由于负荷突增,导致Udc急剧下降,在三种控制方法下,相较于无虚拟惯量控制,传统虚拟惯量控制衰减了电压下跌速度,并且电压最低点提高了0.6 V。采用自适应虚拟惯量控制FESS可以在功率突变瞬间释放足够的辅助功率令其即时、快速地输入系统,用以维持Udc稳定,且该控制相较于传统控制,电压偏差率有所下降,降低ΔUref对小电压变化率的灵敏度,减少暂态响应时间。
4 结束语
本文提出了光储直流微电网中飞轮储能附加变下垂截距的自适应虚拟惯量控制,该控制策略对功率波动时的母线电压稳定性和动态性能起到了一定的改善作用。通过理论推导和仿真验证得到以下结论。
(1)改进的变截距下垂控制简化了控制量和虚拟电容之间的关系,降低了控制系统的复杂性。
(2)所提控制,令换流器在负载突变瞬间提供惯性支撑,避免其输出功率越限,并根据系统动态性能需求,减少了暂态反应时间。
(3)通过仿真对比另两种控制,验证了本文控制可改善飞轮储能变流器对直流微电网的电压和功率调节能力,显著地提高了系统的供电质量。
猜你喜欢
现代电力(2022年2期)2022-05-23 12:46:16
模具制造(2019年7期)2019-09-25 07:30:00
中国惯性技术学报(2018年1期)2018-05-10 16:24:00
重庆理工大学学报(自然科学)(2017年5期)2017-06-29 12:01:58
中国自行车(2017年11期)2017-04-04 02:51:30
电测与仪表(2016年8期)2016-04-15 00:30:16
通信电源技术(2016年4期)2016-04-04 02:57:12
中北大学学报(自然科学版)(2015年6期)2015-12-02 07:01:48
校园英语·中旬(2015年7期)2015-08-10 01:35:27
电测与仪表(2015年16期)2015-04-12 00:44:34
