基于信息化的修船移泊管理系统构建
2023-12-28 12:18:28朱安庆唐海鑫
造船技术 2023年6期
朱安庆, 唐海鑫*, 朱 海, 陈 婷
(1.江苏科技大学 船舶与海洋工程学院,江苏 镇江 212100;2.江苏现代造船技术有限公司,江苏 镇江 212003)
0 引 言
近年来中国修船行业在国际市场的份额不断扩大,但修船企业经营接单存在较大的不确定性,放大修船量在年周期分布上的波动,会出现集中修理的高峰时段,对修船企业承修能力的关键资源如坞位和泊位的利用产生较大的挑战。修造船一体化企业通过造转修的内部转型,或租用闲置坞位和泊位等方式扩大修船产能,不仅加大修船市场产能过剩的情况,而且不利于行业整体的良性发展。从修船企业自身管理来看,如何高效利用有限的关键性资源如坞位和泊位成为亟待解决的问题。
通过分析修船移泊管理业务流程,运用矢量化地图引擎、自动识别系统(Automatic Identification System,AIS)船舶动态定位、区域智能识别等信息化技术,在移泊的高效协同、计划编排、可视化管理和信息及时反馈等方面开展研究,构建基于信息化的修船移泊管理系统[1]。
1 修船移泊管理现状分析
国内修船企业修船移泊管理现状如下:在经营部门接单后,工程部根据坞表计划、航道信息、潮汐信息、天气信息和工程实际进展情况等编写每天的移泊计划,由工程部通过Word和计算机辅助设计(Computer Aided Design,CAD)的文件形式进行发布,修船各部门接收发布的移泊计划,由总管根据现场反馈的人力资源、场地资源和设备资源等信息进行调度安排,由服务车间派遣拖船对泊位中的船舶进行拖运。
分析修船移泊管理现状,主要存在如下问题:
(1)移泊信息传达不到位、不及时,信息追踪困难。现有的移泊信息传递通常是工程部通过邮件、口头、电话、纸质单和微信群等方式传达至各部门,出现有些部门的员工接收移泊信息不及时的情况;信息传递至各部门存在时间差,导致在移泊开始时各部门之间的协调和准备工作不到位的情况;传递的纸质版信息文件易丢失,存在企业内部共享文件夹中的文件版本多,难以进行较好的分类处理,导致对历史数据不能进行有效的分析利用。
(2)移泊计划的编排较为粗放、容错率低、缺乏业务数据联动。现有的移泊计划通常由工程部管理人员通过收集现场人员工程信息的反馈和现场实际查看的情况制定,一旦现场人员信息反馈不及时,则会影响计划执行的准确性;在计划制定后,移泊现场往往出现特殊情况而影响后续计划的顺利执行,这种缺乏数据联动支撑的粗放式计划制定方式较易造成计划的实现效果不佳。
(3)线下难以模拟真实的移泊场景,计划执行过程监控难。在计划执行前使用文件的方式传递移泊策划的结果,这样不能对移泊的过程进行推演。在移泊计划制定后,针对具体的计划执行过程工程部管理人员不再参与,计划执行的实时情况不能准确反馈,难以根据执行数据对后续计划的编排进行调整优化。移泊计划执行的最终状态通过手工反馈的方式提交,不能通过定位的方式实时获取移泊过程和移泊结果,只能在计划执行后了解计划的执行效果,不利于修船企业移泊管理整体效率的提升。
2 修船移泊管理需求分析
基于修船移泊管理需求的系统管理过程主要分为修船移泊计划制定前的准备阶段、修船移泊计划制定和发布阶段、修船移泊计划制定后的反馈阶段。基于信息化的修船移泊管理流程如图1所示。

图1 基于信息化的修船移泊管理流程
基于信息化的修船移泊管理需求分析如下:
(1)修船移泊计划制定前的准备阶段。为模拟真实的移泊环境,系统配备矢量地图引擎和船舶模型库。在修船移泊计划制定前的准备阶段,船舶、坞位、泊位、档位和其他信息均可通过由远程摄像头和船舶定位报文采集的信息在系统中对相应的参数进行设置。
(2)修船移泊计划制定和发布阶段。前期在系统中设置的相关参数可在泊位地图上准确呈现,通过移泊推演对移泊初级方案进行模拟仿真。通过仿真效果验证计划方案设计的可行性,并对方案存在的缺陷进行调整,再进行反复推演获取最佳的移泊方案。在方案确定后通过邮件或企业微信进行自动定时发布。
(3)移泊计划制定后的反馈阶段。发布的移泊计划自动在系统中存档,总管和各部门在系统中及时接收发布的移泊计划,展开移泊工作。在移泊计划各部门的执行过程中,工程调度员可在系统上通过接入的AIS数据端准确了解船舶的移动情况,通过接入的监控系统实时观察现场的计划执行情况。在计划出现偏差时,计划编制人员可适时了解并进行计划调整。系统自动生成船舶的拖运轨迹并保存在系统中,负责制定移泊计划的人员可事后进行查看。
3 基于信息化的修船移泊管理系统设计
3.1 系统架构
系统基于浏览器-服务器结构(Browser-Server,B/S结构)和客户机-服务器结构(Client-Server,C/S结构)混合架构[2],兼容移动端。系统架构如图2所示,其中,PC为个人计算机。
3.2 系统角色
修船移泊管理系统是一个多部门、多人员实现协同操作、信息共享的平台,不同部门的角色拥有不同的职责与权限[3]。修船移泊管理系统角色分配如图3所示。

图3 修船移泊管理系统角色分配
(1)系统管理员:负责对使用系统的人员进行日常的管理,对不同职位的人员进行对应的权限授予;可对移泊计划在制定前需要的一些基础信息进行合理配置。
(2)工程调度员:在系统中需要对移泊计划制定前所需要的基础信息进行相应配置;在计划发布前应在系统中对制定的移泊计划进行推演和修改,最终通过系统进行发布。
(3)总管:在系统中接收发布的移泊计划,在计划执行时对各部门进行统一指挥,并及时将计划执行过程和效果反馈至系统。
(4)各车间主管:在系统中接收发布的移泊计划,在计划执行时及时将执行过程和效果反馈至系统。
(5)拖船管理员:在系统中接收发布的移泊计划,在计划执行时将船舶移泊轨迹同步上传至系统。
3.3 系统功能模块
通过对修船移泊管理系统的需求和业务流程分析[4],进行该系统的模块设计。修船移泊管理系统功能结构如图4所示。

图4 修船移泊管理系统功能结构
(1)人员配置模块:用户管理和权限管理,对使用系统的人员进行权限授予和监督管理。
(2)资源配置模块:码头基础信息配置、船坞基础信息配置和泊位基础信息配置。对移泊计划编制前涉及的各类现场资源进行基础配置,保证计划编写的合理性和精确性。
(3)可视化界面配置模块:移泊地图基础配置和船舶模型库基本配置。通过由矢量地图引擎建立的移泊地图模拟现场的移泊过程,对制定的计划进行可行性验证,并可通过对移泊仿真模拟参数的调整获取更佳的移泊计划方案。
(4)计划编制模块:移泊计划推演、移泊计划编写和移泊计划发布。通过远程调用现场数据、船舶位置信息,对需要发布的计划进行推演和优化,并将验证和优化后的移泊计划通过邮件或企业微信端进行定时发布。
(5)计划反馈模块:泊位状态反馈和日移泊计划反馈。每日收集的泊位状态及时反馈至系统,使工程调度员可准确监控计划的执行情况,在必要时进行调整。
(6)计划版本管理模块:移泊计划版本查看、移泊轨迹查看和移泊计划存档。可及时保存每次发布的移泊计划,并可自动记载移泊船舶的移动轨迹。
4 基于信息化的修船移泊管理系统实现
4.1 技术支持
修船移泊管理系统的实现主要基于矢量化地图引擎、AIS船舶动态定位和智能区域识别等3项技术。
4.1.1 矢量化地图引擎
为满足厂区地图自定义的使用场景,采用ArcGIS软件制作厂区矢量化地图,并基于DevExpress Map组件封装系统使用的矢量化地图引擎。通过解析shp文件,获取点、线、面对象的坐标信息并存储,实现多图层的地图快速配置和多端展示[5]。B/S架构的可视化展示端接收地图基础图元信息,采用Canvas绘制呈现。
一般来说,在地理信息系统(Geographic Information System,GIS)中直接绘制厂区地图,相对复杂、操作难度大,可采用CAD格式的厂区地图作为GIS软件的输入,并添加地理信息坐标,输出标准的shp文件。船舶作为地图上展示的动态元素,可按船型/工程制作矢量化船舶模型图。
4.1.2 AIS船舶动态定位
调用第三方AIS定位接口服务,定时获取设定范围接收区域内的船舶AIS信息[6],包括静态信息[水上移动通信业务标识码(Maritime Mobile Service Identity,MMSI)、船名、国际海事组织编码(IMO Number)、长度、宽度和船舶类型等]和动态信息(经纬度、航行状态、航首向和航速等)。在系统修理工程初始化中预设船舶的IMO Number,根据IMO Number可匹配船舶的具体定位信息。
4.1.3 智能区域识别
移泊管理存在两种区域识别场景:①识别修理船舶当前的具体船坞、码头或泊位;②在多艘修理船舶进入某具体区域时,判断具体的停靠档位次序。采用定位设备获取区域轮廓点和档位方向识别点的经纬度信息,并预设在系统中。船舶中心点通过调用AIS船舶动态定位接口服务实时获取。
(1)识别场景①:选择合适的区域轮廓点对某一具体区域标识,即将区域采用闭合的凸多边形空间表示,将船舶中心点位置标识为P,船舶位于具体区域位置问题可简化为判定点P是否位于凸多边形空间内,具体如图5所示。根据向量叉积法,按照逆时针(顺时针)取向量进行叉乘,所得值同号则说明点在多边形内部,即取向量AB和AP、BC和BP、CD和CP、DE和DP、EA和EP进行叉乘,判断所得值是否同号。

图5 移泊区域识别
(2)识别场景②:移泊档位识别如图6所示。若约定A号泊位1号档位为内,2号档位向外,由内向外取2点构建方向向量U,取相邻2艘修理船舶中心点P1和P2构建向量V,通过向量V和U同向或反向判定船舶的停靠次序,同向即1号船为01档,2号船为02档,反之2号船为01档,1号船为02档。

图6 移泊档位识别
4.2 实现流程
移泊管理系统实现流程如图7所示。根据船厂闭合的地理经纬度坐标点集和区域方向向量建立智能识别区域,利用矢量化地图引擎模拟船厂的实际移泊环境,通过AIS船舶动态定位技术获取船舶的相关数据信息。通过对上述3项技术的整合,在系统可视化界面中对移泊管理流程进行相应的展示,根据在厂船舶和计划进厂船舶在地图界面进行移泊操作,推演合适的移泊路径,自动生成移泊计划,并发布现场使用。

图7 移泊管理系统实现流程
4.3 界面应用
移泊识别区界面如图8所示。在系统界面上可看到建立的识别区内泊位、坞位和档位的实时状态,根据获取的泊位、坞位和档位的实时状态对第二天的移泊计划进行制定和推演。
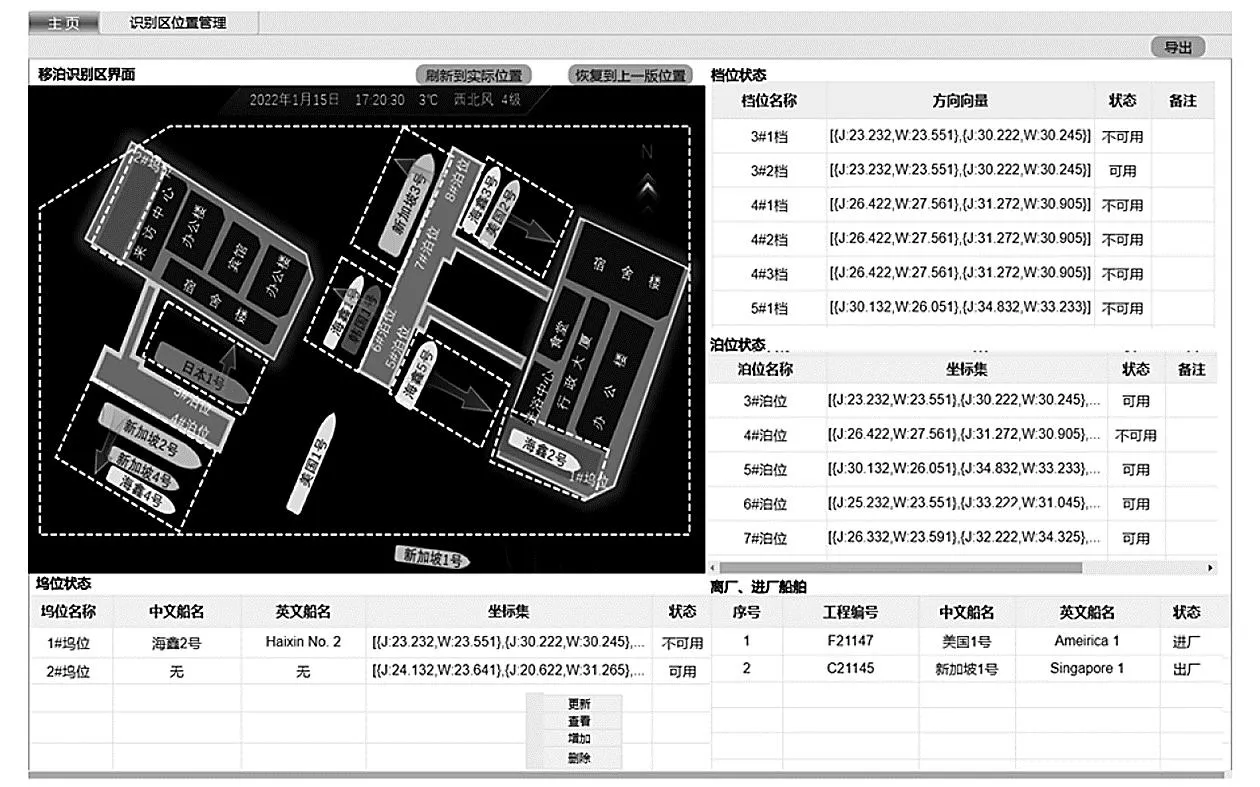
图8 移泊识别区界面
移泊计划编制与发布界面如图9所示。系统的使用人员可在该界面上进行移泊计划的推演、制定、修改和发布。

图9 移泊可视化编制和发布界面
5 结 语
通过对修船企业现有移泊管理现状和业务需求的分析,针对当前修船企业移泊管理存在线下协同不够高效、计划编排较粗放和信息反馈不及时等问题,运用信息化手段,将矢量化地图引擎、AIS船舶动态定位和区域智能识别等技术融入修船移泊管理系统,实现修船移泊流程的信息化管理,为企业提高泊位使用效率提供技术支撑,为逐步实现数字化修船迈出坚实的一步。
猜你喜欢
承德医学院学报(2022年2期)2022-05-23 13:01:44
中国交通信息化(2018年8期)2018-11-09 01:05:50
智富时代(2018年9期)2018-10-19 18:51:44
中国船检(2017年3期)2017-05-18 11:33:08
水道港口(2016年3期)2016-04-07 13:50:11
武汉理工大学学报(交通科学与工程版)(2015年5期)2015-12-05 02:19:55
河南科技(2015年2期)2015-02-27 14:20:29
中国美容医学(2015年5期)2015-01-21 10:46:53
电测与仪表(2014年15期)2014-04-04 12:05:32
塔里木大学学报(2014年3期)2014-03-11 18:47:28