
基于典型工况的混动汽车能量流测评与优化
2023-12-26 01:01侯建军王奉双杨建军王宝森武玉琪
车用发动机 2023年6期
侯建军 ,王奉双,杨建军,王宝森,武玉琪
(1.内燃机可靠性国家重点实验室,山东 潍坊 261000;2.中国汽车技术研究中心有限公司,天津 300300)
在碳中和背景下,混合动力技术已成为节能汽车的成熟技术路线,混合动力专用发动机、专用耦合箱、电机和电池构成了混合动力汽车的主要零部件,根据不同的电机位置形成了不同混动汽车构型及其能量管理策略。目前,串并联构型的混合动力汽车架构简洁、节能效果显著,得到了普遍应用[1-2]。然而,混合动力汽车的复杂构型和众多工作模式,导致其内部的能量转换过程多变、能量流传递和分配过程复杂[3]。同时,混合动力汽车的能量转化效率和传递效率受循环工况的影响更为明显,这主要是不同循环工况下的工作模式、控制策略和约束等边界条件的影响,导致混合动力汽车在不同循环工况下的性能分析变得更加复杂[4]。针对混合动力汽车的能量流和能量管理策略的对标成为当前性能开发工作的主要手段。
针对混动汽车复杂的能量流分布问题,采用基于规则的能量管理策略[5-7]可以实现对混合动力汽车简单且有效的控制,但无法实现最优控制。因此,伴随着混合动力汽车的发展,基于优化算法的能量管理策略作为重要补充不断得到发展。基于优化算法的能量管理策略包括基于动态规划(dynamic programming,DP)[8]或庞特里亚金最小值原理[9]的全局优化能量管理策略,基于等效燃油消耗最小[10-11]或模型预测[12]的瞬时优化或混合型能量管理策略[13-14]。采用全局优化算法的能量管理策略通常需要运行场景已知或可预测[15-18]。为此可将标准循环各组成部分进行重组以构建不同的运行场景[16],或基于实测道路数据构建代表性循环工况,从而实现针对规则能量管理策略的参数优化[18]。
针对混合动力汽车构型多,能量管理策略复杂,能耗分析及优化困难,难以系统、全面地深入分析和有效优化能耗的问题,本研究提出了基于整车能量流分区解耦的测评与优化方法,针对P1P3构型的混合动力汽车开展了不同循环工况的能耗测试,获得了各工况下的整车能量流分区分布特征,重点针对WLTC循环工况进行了能量管理策略的分析。同时,提出了一种针对道路实测和典型循环工况分别计算速度特征和驾驶激烈程度特征的方法,根据该工况特征获得各典型循环与道路实测工况的欧氏距离,挑选其中欧式距离最短的典型循环工况代表该实测道路工况,针对该典型循环工况进行全局优化,降低了典型循环工况下的能耗,实现了对实际道路运行能耗的改善。
1 整车能量流评价及优化方法
1.1 整车能量流典型测评工况
目前已经发布实施的GB/T 19753—2021标准用于测试混合动力汽车的能耗和续驶里程[19],试验循环从新欧洲驾驶循环(new european driving cycle,NEDC)切换为全球统一轻型车测试循环(worldwide light-duty test cycle,WLTC)和中国轻型汽车行驶工况[20](China light vehicle test cycle,CLTC),其中,CLTC循环主要用于循环外技术评价和纯电动汽车的能耗测试。3种典型法规循环工况曲线见图1,特征参数见表1。
不同法规循环工况的特征参数差异显著,其中,WLTC循环车速变化最激烈,更加接近实际驾驶工况。本研究车辆为非插电式混合动力汽车,按照GB/T 19753—2021法规要求,采用单独进行电量保持模式的试验方法开展能耗测试,而且储能系统在循环始末必须处于平衡状态,总体上不能放电运行,否则需要连续试验,直至出现有效试验结果。
1.2 整车能量流分区解耦方法
整车能量流分区解耦方法针对整车能耗进行解耦测试、分析与评价[21]。如图2所示,整车能量流分区解耦方法将车辆的能源消耗分为5个区域,每个区域的能量流经过的零部件不同,能量流特征也不同。A区能量流特征表征燃油转化效率及损失的发动机功率。混合动力专用发动机从面工况变为线工况或点工况,其设计主要考虑避免出现低效率运行工况,降低能量转化损失,实现40%以上的热效率[1-2]。B区能量流特征是驱动电机从电池获取能量,或者通过串联/并联发电向电池补充能量,实现电能和机械能之间的能量转化,通常采用电机效率参数表征能量转化过程中传递的有效能量及损失。C区能量流评价参数包括空调能耗及低压电器附件功耗[21-22]。D区能量流特征是传动效率和传动损失。E区能量流特征是整车外部阻力功率需求,对于同一车型,该参数随着行驶道路特征(拥堵程度)及行驶工况(加减速及稳态运行)的不同存在差异:在市区行驶时,整车外部阻力以加速阻力为主;在市郊行驶时,整车外部阻力以风阻为主。

图2 整车能量流分区
图3示出针对混合动力车辆的整车能量流测试传感器布置示意。动力传动系统传感器布置(见图3a)如下:车载油耗仪布置在发动机进油口前端;1缸布置缸压传感器用于测试缸压;在排气管布置氧传感器;车轮扭矩通过车辆CAN总线读取;发动机扭矩通过飞轮扭矩传感器获取;发动机转速和电机转速、扭矩通过车辆CAN总线读取。高压系统传感器(见图3b)布置包括如下:动力电池输出给电机控制器的直流电流、电压,布置在控制器的输入端;控制器输出给电机的交流电流、电压,布置在控制器的输出端;电动压缩机的输入电流、电压,布置在电动压缩机输入端。

图3 整车能量流测试系统示意
1.3 整车能量流动态规划优化方法
如前所述,整车能量流管理采用基于规则的能量管理策略,通过电量管理、扭矩分配管理、能量回收管理等,实现理想的整车能量流分布设计。在运行工况曲线已知的情况下,推荐采用动态规划算法实现能量管理策略优化。动态规划是针对多阶段决策过程获取全局最优问题解的有效方法,随着混合动力汽车能量管理策略的发展得到广泛应用[15]。
在离散时间域下,动态规划控制策略模型的状态方程见式(1)。
xk+1=f(xk,uk)。
(1)
式中:x为电池荷电状态(state of charge,SOC),表征状态的变量;k为离散计算的阶段;u为需求扭矩在电机和发动机之间的分配比例,表征决策的变量。
基于动态规划算法的能量管理策略的计算规则为,在维持SOC平衡的前提下实现整车能耗最低,满足法规GB/T 19753—2021对储能系统在循环始末处于平衡状态的要求。如式(2)所示,选取燃油消耗量作为能量管理策略的扭矩分配指标,得到燃油消耗最小化的成本函数:
(2)
式中:N为已知工况的阶段;L为所处阶段的瞬时油耗;J为累计油耗,即成本。
在状态变量终止范围的约束下,根据贝尔曼最优性原理[24-25],从已知过程的最后一个阶段开始,根据式(3)由后往前依次计算每个阶段下所有状态的最佳指标函数值和最优扭矩分配比例,在已知初始状态值的情况下获得特定工况的SOC最佳变化轨迹以及最低油耗。
Jk*(xk)=min{L(xk,uk)+Jk+1*(xk+1)}。
(3)
式中:Jk*(xk)和Jk+1*(xk+1)分别为第k阶段和第k+1阶段的能量消耗最小值;L(xk,uk)为从k到k+1阶段每一步的转移能耗。
2 基于典型循环工况的整车能量流测评与分析
2.1 研究车辆基本参数
研究车辆的基本参数见表2。

表2 研究车辆的基本参数
2.2 整车能量流分区解耦结果
根据上述整车能量流分区解耦方法,在研究车辆上布置传感器及数据采集系统进行试验测试,得到了如图4所示的WLTC循环工况下的能量流解耦结果。图4中,发动机输出能量的大部分用于串联发电机及并联驱动,较少部分用于并联发电,因此该研究车辆以电机单独驱动为主,辅以发动机驱动,并且充电模式以串联发电为主。同时,发动机提供的发电机能量2.721 kW·h经发电机转化后,提供给电机能量是2.031 kW·h,能量损失0.69 kW·h,转化效率为74.64%。相比传统动力车辆,混合动力汽车效率显著提升,比如本研究中车辆的综合循环热效率最高达到了36.79%。同时,作为节能的重要手段,能量回收也是重要的评价参数,该车辆市区循环的能量回收效率达到了87.04%,处于较高节能水平。由此,研究车辆的整车综合效率也较高,特别是高速循环工况达到了29.72%,远远高于传统动力车辆(一般略高于20%)。
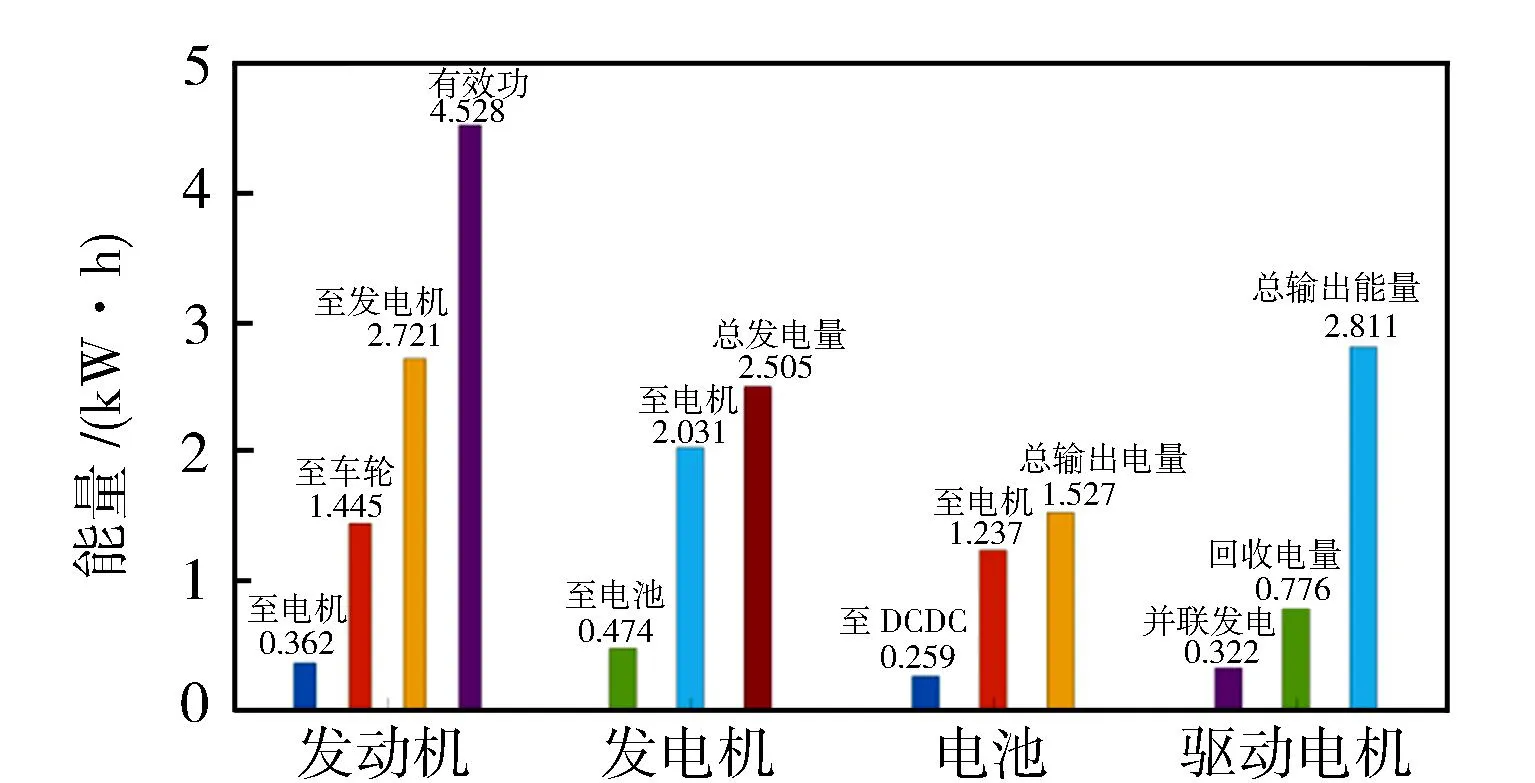
图4 整车能量流解耦结果
2.3 基于典型循环工况的整车能量流瞬态分析
为了研究车辆的能量管理策略,针对WLTC循环的各个子工况进行了瞬态分析,主要对比不同车速下的发动机输出功率、发电机功率、电机功率;针对运行模式按照纯电模式、并联模式和串联模式,给出了各运行模式在车速曲线上的分布及其相应的电量SOC变化曲线。图5和图6分别示出是市区循环和高速循环工况的瞬态过程数据,是针对两种典型循环工况的对比。由图知,市区循环工况通常采用纯电驱动,避免发动机低效率运行,是混合动力主要的节能所在;高速循环工况通常采用发动机直驱模式,以充分实现发动机高效率运行,避免出现发动机提供能量给发电机,再通过发电机发电输出给电机驱动车辆,从而造成能量转化及传递链过长,导致系统效率低。

图5 市区工况的输入输出功率

图6 超高速工况的输入输出功率及运行模式
如图5所示,市区工况纯电行驶,车辆外部阻力功率需求全部由驱动电机提供(峰值30 kW),最高车速接近50 km/h;车辆通过滑行制动回收发电实现电能补充,同时在加速过程中出现了发动机运行的串联发电工况(图中△点部分),但电量SOC从49%降低至42%,总体上处于放电状态。
作为市区工况的典型对比,如图6a所示,研究车辆在超高速工况下主要由发动机和驱动电机共同驱动行驶,外部阻力功率需求峰值为60 kW,发动机驱动车辆的同时还提供串联发电,发电功率峰值60 kW。对比市区工况,超高速工况下的发电工况显著增多(图中△曲线所示),发动机运行时间占比也明显增加(图中·曲线所示)。如图6b所示,尽管处于超高速工况,但运行电量SOC略有升高(从43%升高至45%),整车综合效率处于较高水平,是车辆比较节能的运行工况。虽然处于超高速工况,但发动机和电机共同驱动的并联工况并不多见(图中△点所示)。
2.4 基于典型循环工况的整车能量流运行工况点分析
图7示出了WLTC循环中发动机及双电机运行工况分布特征。在WLTC循环工况中,串联模式运行时长仅占4.6%,但其输出能量却占全部需求的55.4%,特别是郊区工况的电量SOC明显处于较高水平,整体上处于充电状态。循环中,发动机和发电机的扭矩分别在各自相对固定的数值附近运行,发动机和发电机的转速与车速解耦,但驱动电机的转速与车速耦合运行。由于在市区和市郊循环工况下,车辆几乎全部采用纯电驱动,同时通过串联发电补充能量,一方面充分利用了电机在中低转速工况大扭矩高效率运行的优势,另一方面发动机固定在转速1 200 r/min左右运行,有助于实现高效运行。在高速和超高速循环工况中,发动机直接驱动车辆具有更高的热效率,不再进入串联发电及电机单独驱动模式。
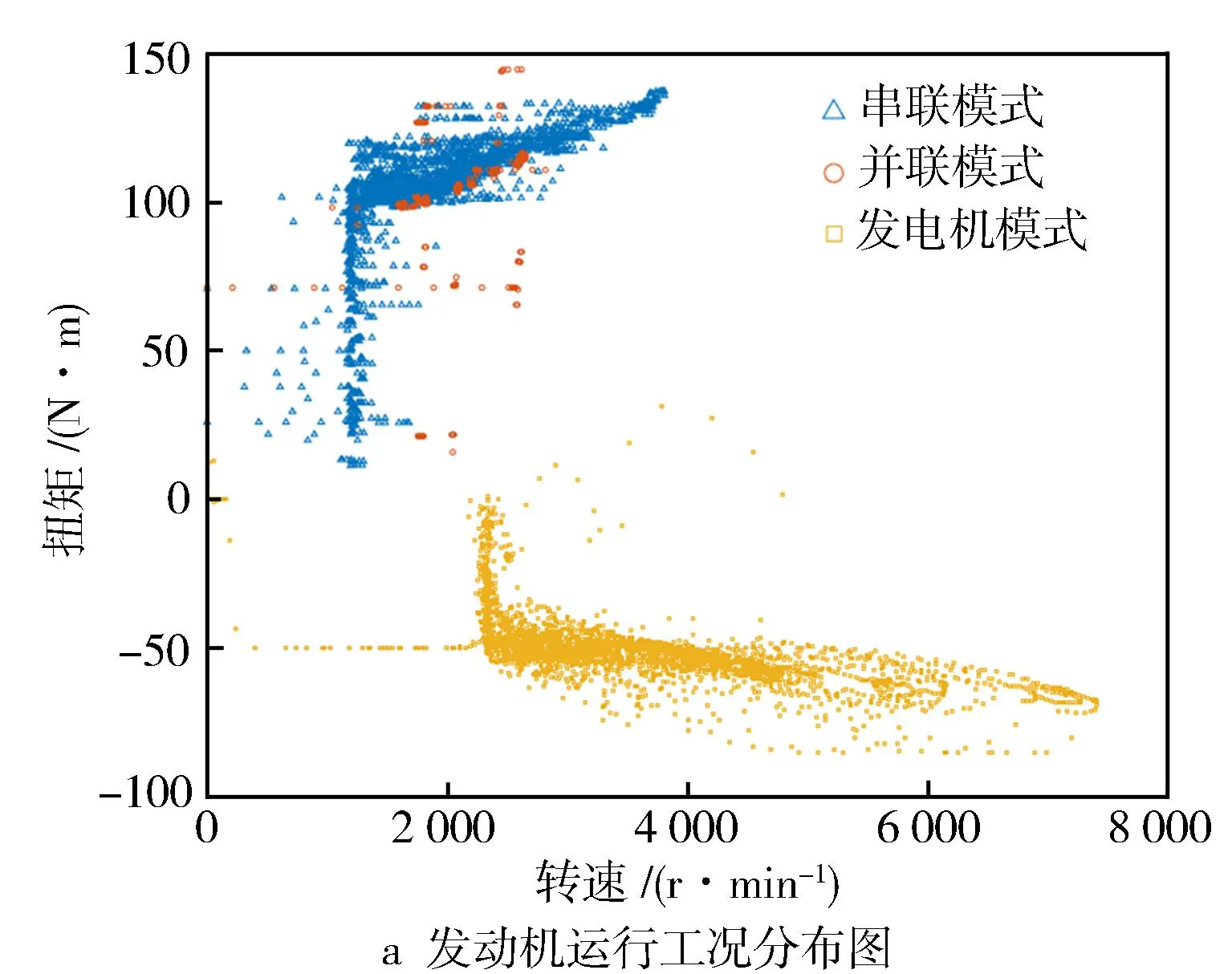
图7 发动机及双电机运行工况分布特征
3 基于典型循环工况降低实际道路运行能耗
如前所述,基于典型循环工况分析整车能量流及能量管理策略,分析过程及结果实现了针对混合动力车辆的能耗测试和评价。进一步基于典型循环工况提出了针对实际道路运行工况的能耗优化方法,该方法分别针对典型循环工况和实际道路运行数据计算各自的工况特征参数,然后基于该工况特征参数计算各典型循环工况与实际道路运行工况的欧氏距离,挑选欧氏距离最短的典型循环工况作为代表,针对该典型循环工况进行扭矩分配策略的优化,从而实现实际道路的策略优化。
3.1 工况特征参数的提取
整车能耗与单位里程下的滚阻消耗能量、空气阻力消耗能量以及加速消耗能量成一定比例,比例系数为动力系统效率(ηPT)。整车整备质量(m)、滚阻系数(cr)、空气阻力系数(Cd)、车辆迎风面积(A)、空气密度(ρa)均为常数,所以单位里程下的滚阻消耗能量为常数,单位里程下的空气阻力消耗能量与加速阻力消耗能量分别取决于式(4)和式(5)。
(4)
(5)
式中:v为车速;d为行驶里程;IV和IA分别为车辆运行工况的速度分布及驾驶激烈程度。
对于混合动力车辆,其驱动消耗的电能在串联发电、并联发电及制动滑行回收过程中被及时补充。其中,串联发电和并联发电取决于发动机和电机的运行效率,回收能量取决于车辆的动能回收效率。因此,不同工况下的整车能耗主要取决于ηPT、IV和IA,对于特定车辆,ηPT是确定的,因此最终IV和IA决定了车辆的能耗。
3.2 基于工况特征参数实现典型循环代表工况的选择
为了实时识别车辆道路行驶工况并匹配使用相似典型循环工况的能量管理策略及优化参数,本研究首先采用研究车型进行了实际道路测试,获得了如图8所示的实测样本数据,根据式(4)和式(5)计算该样本数据的IV和IA。

图8 实测道路数据样本
为了消除量纲的影响,采用式(6)对实测样本的IV和IA进行标准化:

(6)
式中:Fnomi为标准化结果;dciniji为第j个样本的第i个特征参数;σi为第i个特征参数向量的标准差;m为样本个数。
基于特征参数标准化结果,采用主成分分析消除标准化特征参数之间的相关性,得到的主成分如式(7)所示:
[PC1PC2]=[Fnom1Fnom2]·Co2×2。
(7)
式中:PC1和PC2是IV和IA的主成分,Fnom1和Fnom2分别是IV和IA的标准化结果,Co2×2是特征参数的协方差矩阵。
为了挑选与实测道路数据最相似的典型循环工况,本研究选择了7种典型循环工况:CLTC-P、FTP75、JC08、LA92、NEDC、UDDS和WLTC;同时还将CLTC-P中1部和2部的组合工况(CLTC-P-12)、WLTC中低速和中速的组合工况(WLTC-LM)作为上述候选典型循环工况的补充。如图9所示,采用欧式距离迭代计算的实测道路数据为坐标中心,其周围分布了上述9种候选典型循环工况的特征值。从图9可以看出,WLTC-LM与实测道路数据中心距离最近,最能够表征实际道路运行数据的速度分布及驾驶激烈程度,因此选取WLTC-LM作为策略优化的典型循环工况,针对该典型循环工况优化整车能量流管理策略,实现道路实际运行控制优化。

图9 各典型工况循环与实测道路数据样本的欧氏距离
3.3 基于典型循环工况优化能量管理策略
混动模式下发动机和电机的扭矩分配策略对系统运行效率起决定性作用,因此,选择该部分策略参数进行优化。 为了验证该优化策略的整车节油效果,搭建了研究车辆燃油经济性的仿真模型,该仿真模型由AVL Cruise整车模型及Matlab/Simulink控制策略模型组成。采用该模型计算的WLTC循环冷起动百公里油耗为8.59 L,相比冷起动转鼓百公里油耗8.46 L,该模型的仿真误差为1.5%。其中,该仿真模型加载了实测的发动机效率MAP、电机效率MAP和变速箱效率MAP,附件损耗550 W,纯电怠速时电机转速为800 r/min,电机扭矩为6~8 N·m,车速低于12 km/h不允许能量回收,车速高于55 km/h时发动机不允许脱开,此时发动机倒拖,提供约-17.5 N·m扭矩,同时采用电池内阻计算电池损耗。
为了实现原规则能量管理策略的优化,采用了如1.3节所述的动态规划算法及如上原仿真模型加载的MAP参数和策略运行边界条件限制,搭建了基于动态规划算法的经济性优化计算模型,根据式(3)获得特定工况的SOC最佳变化轨迹以及最低油耗。基于该模型及所选的WLTC-LM循环工况,分别采用原控制策略和DP动态规划策略进行仿真计算,结果见表3。由仿真结果可见,采用原控制策略的热机起动百公里油耗为7.54 L。如图10所示,经过动态规划算法模型的优化,发动机运行工况分布得到改善,没有出现低于50 N·m的低负荷工况,高于150 N·m的高负荷工况也极少,大部分工况都集中分布在发动机高效运行区,研究车辆采用动态规划算法后经济性提升了3.98%。

表3 百公里能耗仿真结果
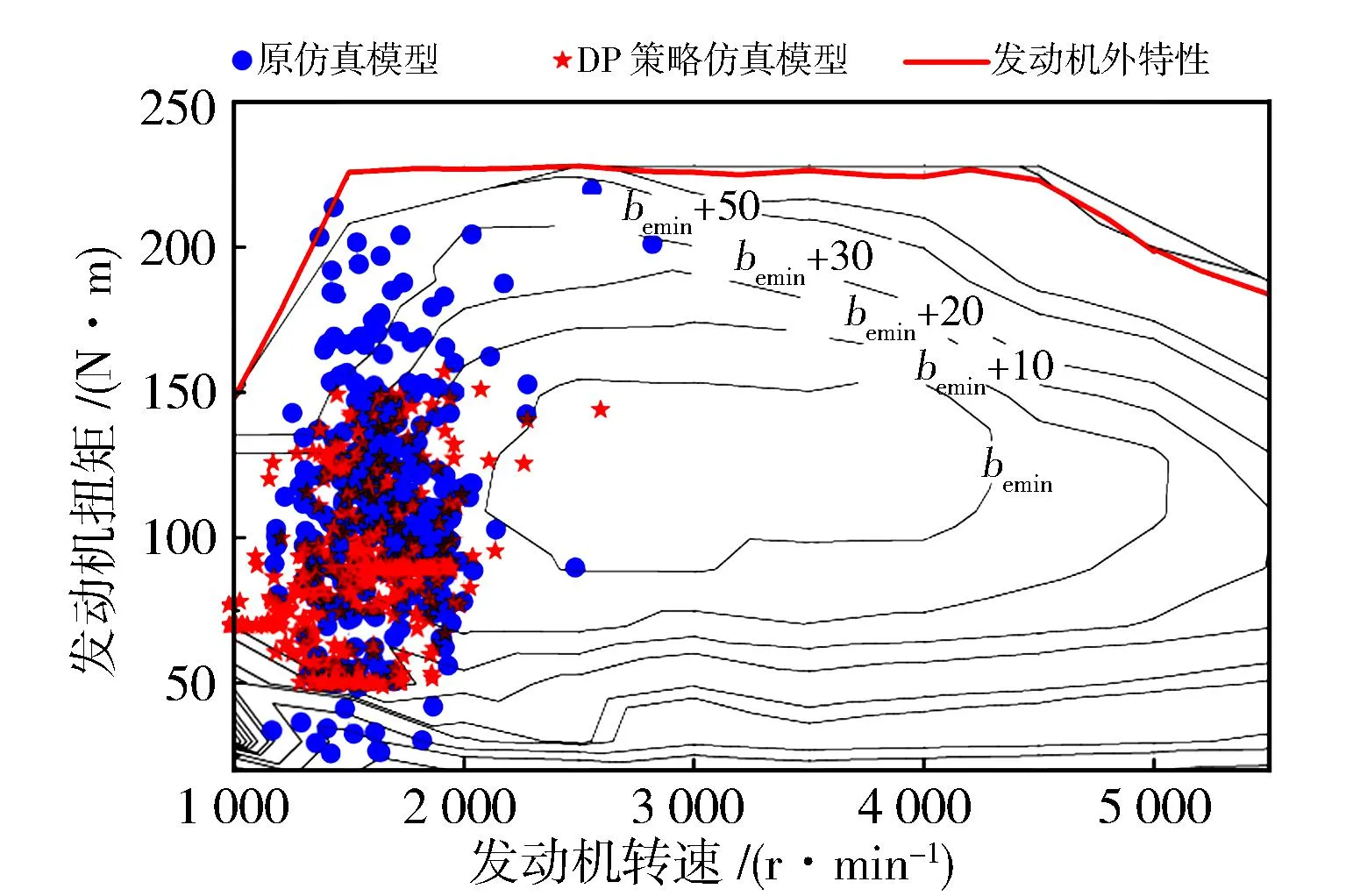
图10 发动机工作点分布对比
4 结束语
以混合动力汽车为研究对象,开展了不同循环工况下的整车能量流分析,得到了WLTC循环工况下的发动机、发电机、驱动电机及整车的运行特征及整车能量流评价指标。研究车辆以电驱为主,发动机主要用于补充电驱能量,发动机循环综合效率和能量回收效率都处于较高节能水平,高速工况下整车综合效率为29.72%,是车辆最节能的工况。混合动力汽车的串联发电运行占比仅4.60%,但输出能量占全部需求能量的55.40%;发动机和发电机按照类似于线工况区域运行,驱动电机按照面工况运行。
提出了一种采用速度分布特IV和驾驶激烈程度特征IA迭代计算典型循环工况与道路运行数据的欧氏距离,选取其中欧氏距离最短的典型循环工况代表该道路运行工况,针对该典型循环优化扭矩分配策略,实现了典型工况的能耗优化,从而实现了实际道路运行工况的能耗优化,经仿真验证,整车百公里能耗降低了3.98%。
猜你喜欢
小学生作文(低年级适用)(2022年10期)2022-10-31
汽车实用技术(2022年15期)2022-08-19
建材发展导向(2022年10期)2022-07-28
中学生数理化·七年级数学人教版(2022年11期)2022-02-14
大众投资指南(2021年23期)2021-12-06
建材发展导向(2021年12期)2021-07-22
建材发展导向(2021年9期)2021-07-16
现代临床医学(2021年1期)2021-01-26
噪声与振动控制(2015年4期)2015-01-01
客车技术与研究(2014年1期)2014-03-20
