
基于卷积神经网络的轮胎花纹噪声值预测
2023-12-25 08:33李志伟王青春
轮胎工业 2023年12期
李志伟,苏 宇,张 舜,王青春*
(1.北京林业大学 工学院,北京 100091;2.安徽路必达智能科技有限公司,安徽 合肥 230031)
随着社会经济的快速发展、生活水平的显著提高,汽车使用量快速增多,随之带来的汽车噪声问题也越来越严重。噪声会对人的听力、视觉、神经系统和内分泌系统等造成伤害。汽车噪声是道路交通噪声的主要来源,轮胎是汽车噪声重要的噪声源之一,尤其是汽车的行驶速度达到70 km·h-1以上时,轮胎噪声是汽车噪声的主要组成部分[1]。为了减少噪声污染,世界多国对轮胎噪声有严格规定[2]。轮胎通常采用经验设计方法,其噪声性能需对成品轮胎进行试验来获取,在设计轮胎花纹的初期很难对轮胎的噪声性能进行有效评估,具有很大的盲目性[3]。因此,开发预测轮胎花纹噪声值的模型显得尤为重要。
对轮胎花纹噪声值的预测研究通常采用理论解析方法得出若干半经验理论公式,或采用有限元分析方法对轮胎模型进行噪声仿真。李福军等[4]通过对不同花纹轮胎发声机理的研究,建立预测数学模型,模拟计算花纹沟的发声情况,结果显示,花纹沟的深度和宽度对轮胎噪声的影响不大,而花纹沟的角度对轮胎噪声的影响较大。蔡昶文[5]采用数值仿真验证泵吸噪声理论,并对不同强制位移下轮胎花纹沟的泵吸噪声进行分析,实现了对轮胎噪声的量化模拟及预测。冯希金等[6]以轮胎花纹和胎冠进行三维建模得到的加速度场作为声源,采用有限元方法对轮胎滚动噪声进行分布预测,证明频率在1 000 Hz以下的轮胎滚动噪声主要是由花纹的冲击振动引起的。然而,采用上述方法对轮胎噪声进行预测的准确率较低,花费时间较长,并且在实际运用中很难批量处理复杂花纹的轮胎,因此研究轮胎花纹结构与花纹噪声值之间的关系十分困难。
近年来,深度学习技术在人工智能领域有着飞速的发展,因其学习能力强、覆盖范围广、适应性好等优点,在图像识别、自然语言处理等领域有着广泛应用。S.LUCAS等[7]利用2个人工神经网络ANN1和ANN2分别预测了轮胎的花纹噪声和非花纹噪声,其中ANN1的输入是由数字化三维胎面花纹计算得来的胎面轮廓谱和空气体积速度谱。优化后的神经网络能很好地预测车辆行驶过程中轮胎与路面相互作用引发的噪声。清华大学的项大兵等[3]在大量不同花纹轮胎噪声试验的基础上,建立了轮胎花纹几何结构与噪声试验结果之间的BP神经网络模型,采用该模型预测轮胎噪声的准确度达到了85%。韩国仁荷大学的L.SANGKWON 等[8]提取28条试验轮胎花纹印痕的图像特征,将花纹图像和实测功率谱分别作为卷积神经网络(CNN)的输入和输出,预测功率谱与实测功率谱的相似度达到89%。
本工作提出了一种基于深度学习中CNN的预测方法,其不依赖于物理理论模型,而是提取轮胎花纹的图像特征,通过训练学习输出不同花纹图像对应预测噪声值的数学模型,并对比研究CNN模型和BP神经网络模型对相同轮胎花纹噪声值的预测精度。
1 CNN模型预测轮胎花纹噪声值流程
基于CNN模型预测轮胎花纹噪声值的流程如图1所示,主要有对输入图像的预处理、构建神经网络和预测轮胎花纹噪声值几部分。轮胎花纹图像经过处理后,直接输入到搭建好的CNN中学习、训练,并预测噪声值。
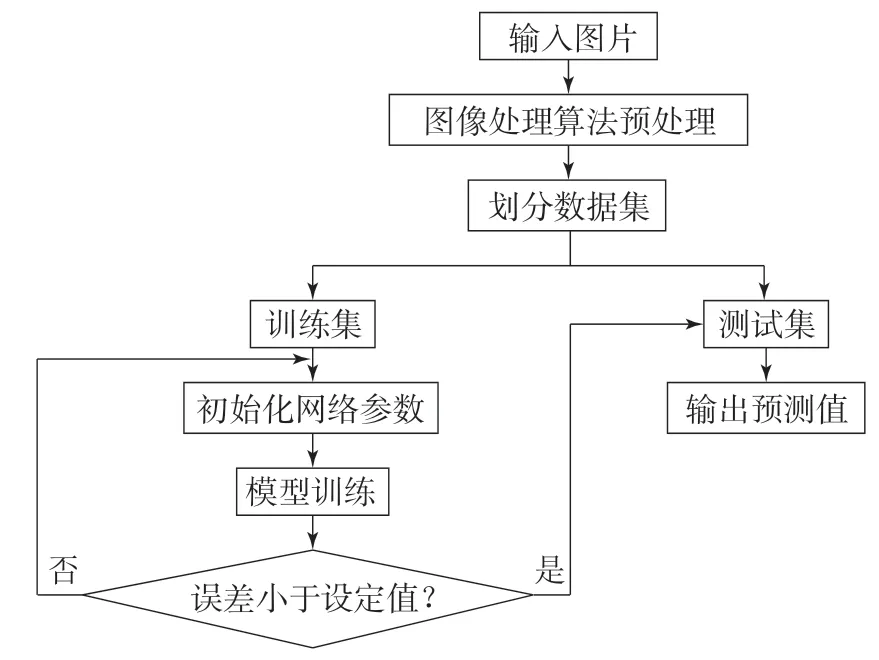
图1 基于CNN模型预测轮胎花纹噪声值的流程图
1.1 轮胎花纹图像预处理
轮胎花纹图像在输入CNN模型之前需要进行预处理。首先选取可以体现整个轮胎花纹特征的区域进行剪切,对剪切后的图像进行锐化处理以增强花纹沟的边缘轮廓,使花纹沟与花纹块清晰可分辨,然后用高斯滤波等方式去除图像上的噪点,对图像进行优化。忽略花纹深度造成的影响[2],将图像进行灰度处理以突出花纹沟和花纹块的形状特征,如图2所示。
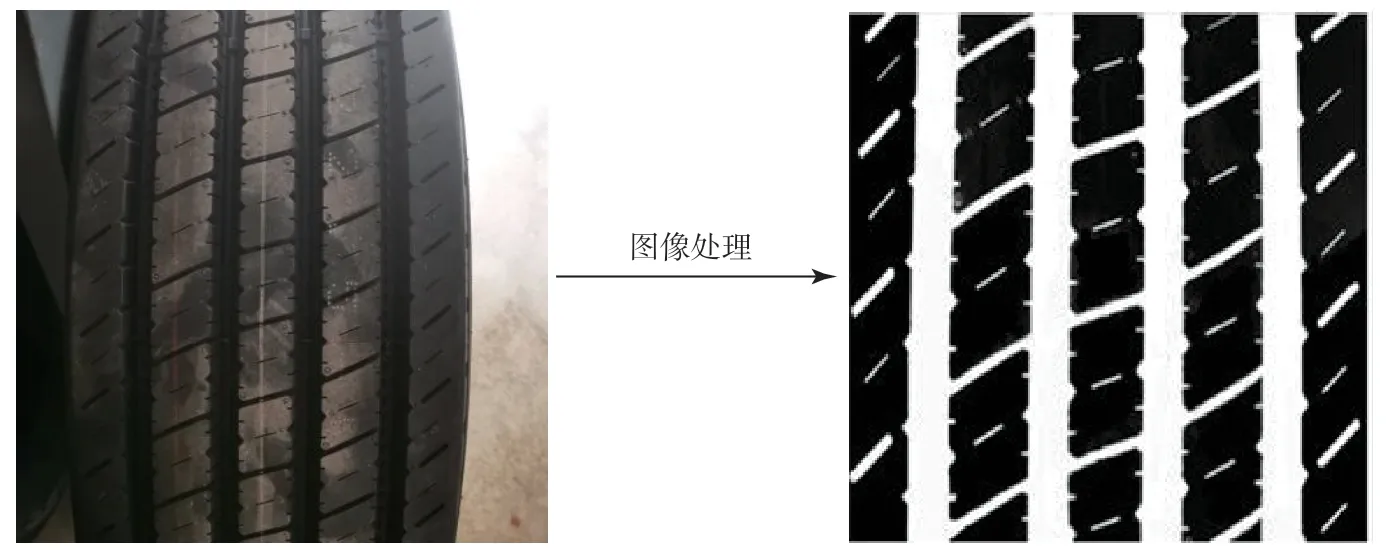
图2 轮胎花纹图像处理
经过灰度处理的轮胎花纹图像的像素较大,为400×400,若直接输入到CNN模型中,CNN提取图像特征的时间过长,为了缩短CNN模型的训练时间,需要在不丢失与图像噪声有关信息的前提下,采用小波变换的方法将图像的像素压缩至100×100,压缩前后图像如图3所示。

图3 压缩前后图像
从图3可以看出,压缩前后图像的花纹沟、花纹块没有明显差异。
灰度化后图像的像素为0~255,为减少图像输入CNN后模型的运算量,将灰度化后轮胎图像的像素用公式(1)归一化至0~1,即
式中,Pold为归一化前的像素值,Pnew为归一化后的像素值。
1.2 构建CNN模型
CNN在图像识别领域有着重要的应用,选择CNN来预测轮胎花纹噪声值。CNN是包含卷积操作、权值共享、局部连接的前馈神经网络,其主要包括输入层、卷积层、池化层、全连接层和输出层[9]。输入层的作用是将图像输入网络。卷积层的作用是提取输入图像的信息,被提取的图像信息被称为图像特征,图像特征由图像中的每个像素通过独立或者组合的方式体现,比如图像的纹理特征、颜色特征等。池化层的作用是对图像特征进行挑选,通过降低特征图像的分辨率获得具有空间不变性的特征,起到二次提取特征的作用[10],常见的池化操作有最大池化和平均池化。全连接层的作用是将池化层得到的特征矩阵转化成一维的特征向量,数据将进行由多到少的映射,实现端到端的学习过程,提高网络的鲁棒性。数据从全连接层到输出层会再一次减少,变成更低维的向量,这个向量即为噪声预测值。本工作构建的CNN模型结构如图4所示。CNN模型含有3个卷积层,每个卷积层后各有1个池化层,最后有1个全连接层。3个卷积层的卷积核大小均为3×3,分别有8,16和32个;3个池化层的池化核大小均为2×2,分别有8,16和32个。花纹图像经过卷积、池化提取特征后,将二维数据压缩成一维数据输入到全连接层,全连接层的输出数据即为轮胎花纹的噪声值。为了提高模型的预测精度,本文在用CNN模型预测轮胎花纹噪声值时,将不同轮胎花纹的噪声值标签用公式(2)进行归一化处理,即模型在训练和测试后得到的输出值(P)均处于0~1之间,再将P通过公式(3)进行反归一化处理,得到真实的噪声值标签(Lt)。
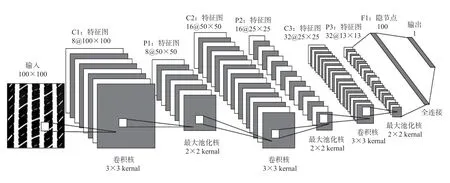
图4 CNN模型结构
式中,L为当前噪声值标签,Lmin为最小噪声值标签,Lmax为最大噪声值标签。
2 结果与讨论
2.1 数据集
本工作采用某公司提供的商用轮胎样本进行花纹噪声预测,样本总数为94个,按照7∶3的比例将样本随机划分为训练集和测试集,即将65个样本的花纹灰度图像作为训练集的输入,将29个样本的花纹灰度图像作为测试集的输入,输出为轮胎花纹所对应的噪声值。
2.2 模型参数设置
本工作采用的CNN模型是基于轮胎花纹图片数据集,使用Python编程语言,在Tensorflow环境平台搭建完成的。通常,CNN使用学习算法来调整其自由参数(偏差和权重),以获得理想的网络输出。用于此目的的最常见的算法是反向传播,反向传播计算目标(成本/损失/性能)函数的梯度,以确定如何调整网络的参数,以最小化影响性能的错误。本工作采用的AdaGrad算法是一种具有特定参数学习率的优化器,可以根据参数在训练期间的更新频率进行自适应调整。该优化算法在陡峭处的学习速率小,防止振荡,在较为平缓处的学习速率较大,使参数能够快速更新,在一定程度上可以避免越过极小值点,提高网络模型预测的准确度,学习效率较高。AdaGrad的计算公式如下:
式中:t为当前迭代次数;gi为函数第i次迭代的梯度;σt为所有梯度的均值平方根;Ψ为常数,初始值为1×10-7(为了防止分母为0的情况);lr为学习率,初始值为0.01。
激活函数使用Relu,当输入值大于0时,输出值等于输入值,当输入值小于或等于0时,输出值为0。由于输出值总是非负数,使用Relu可以消除激活函数中的“梯度消失”问题,这对CNN模型学习非常有帮助。损失函数采用均方误差、评价函数采用平均绝对误差来表示模型的预测值与真实值的偏差程度,从而衡量模型的可靠性。训练CNN模型的一个常见问题是过度拟合,导致经过训练的网络在测试集上的性能不佳,这会影响模型对未显示的数据进行概括的能力,可以采用Dropout层随机删除部分神经元以防止过度拟合,其参数值设置为0.2,表示随机20%的神经元为零权重。
而对于BP神经网络的测试训练,用到的轮胎花纹图像样本也为灰度图像,用PCA降维法从中提取100个相互独立的特征参数输入到模型中。本工作构建的BP神经网络也为3层,分别为输入层、隐含层和输出层,输入层和隐含层各有100个神经元。文献[8]中BP神经网络的输出层为10个神经元,将输出的预测噪声值标签以1 dB为识别精度划分为70,71,72...79,共10类。本工作为与CNN模型的预测效果进行对比,设定BP神经网络的输出神经元为1个,即轮胎通过噪声的声压级水平。数据在隐含层和输出层的传递函数均为tanh函数,学习率为0.1,动量因子为0.1,经过1 000次迭代训练,平均拟合误差控制在0.2 dB以内。
2.3 模型训练及测试
CNN模型训练过程中的损失函数与评价函数如图5所示。
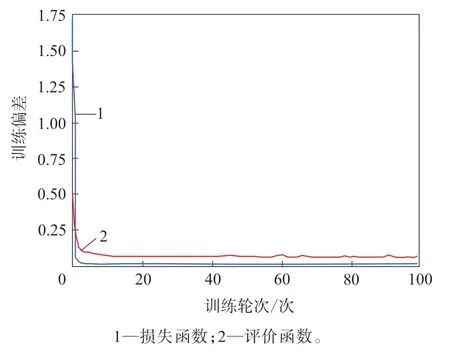
图5 CNN模型训练过程中的损失函数和评价函数
从图5可以看出,CNN模型经过100次训练后的损失函数值可达到0.01,评价函数值可达到0.05,训练轮次为20次左右趋于稳定。
模型训练结束后,用测试集的29个样本对预报模型进行检测,检测结果误差分析如表1所示。用公式(6)计算绝对误差(AE),用公式(7)计算相对误差(RE)。

表1 CNN模型检测结果误差分析
式中,Pc为每个测试集样本的花纹噪声预测值,T为每个测试集样本的花纹噪声真实值。
经过计算,BP神经网络模型测试集中29个样本噪声值的平均绝对误差为0.713 dB,平均相对误差为0.95%;CNN模型测试集中29个样本噪声值的平均绝对误差为0.591 dB,平均相对误差为0.81%,其中15个样本噪声值的误差在0~0.5 dB之间,9个样本噪声值的误差在0.5~1.0 dB之间,5个样本噪声值的误差大于1.0,可见CNN模型比BP神经网络的预测准确度高。
在轮胎花纹噪声值预测中,相比于BP神经网络,采用CNN的优点如下:(1)BP神经网络不能将图像直接输入到网络模型中,需要提取一定数量的主成分特征来代替图像,然后将主要成分特征输入到BP神经网络训练学习,而CNN在图像处理、模式识别领域有着重大应用,可以将图片直接输入CNN,通过卷积、池化操作来学习图片的相应特征,在模式分类领域其可以直接输入原始图像,减少对图片复杂的初期预处理工作;(2)BP神经网络每一层都是全连接的,需要训练的参数多,导致模型学习速度慢,训练困难,而CNN具有局部感知和参数共享的特点,局部感知使每个神经元不需要感知图像中的全部像素,只需要感知其所对应的局部区域,权值共享结构降低了模型的复杂程度,减少了权值的数量,因此学习和训练的速度较快。
采用CNN预测轮胎花纹噪声的结果仍然存在与真实值相差大于1 dB的情况,分析原因如下:(1)输入CNN模型的轮胎花纹图像只考虑花纹块和花纹沟的排布形式,忽略花纹沟的深度和花纹壁的倾斜角度的影响;(2)采集的轮胎花纹样本数量太少,对于深度学习网络,样本数量越多,模型的学习和预测能力越好,鲁棒性越强;(3)CNN模型的结构层数、参数等还需要进一步优化调整;(4)在划分训练集和测试集时按照一定比例随机划分,导致模型每次的预测效果可能因样本差异而不同。
3 结论
轮胎花纹噪声值受多种因素影响且每种因素非独立作用,存在相互耦合的现象,现有的轮胎花纹噪声预测方法难且预测精度低,针对这一问题,本工作基于图像处理和深度学习搭建了预测不同轮胎花纹噪声值的CNN模型,并对输入CNN的噪声值标签进行归一化与反归一化的处理,使该模型对花纹噪声值的预测平均误差达到0.591 dB,平均相对误差能达到0.81%。与BP神经网络相比,CNN模型具有更高的预测精度,满足轮胎花纹设计初期对噪声值预测的准确度要求,在轮胎投入生产之前,轮胎设计师可以利用预测花纹噪声的数学模型对轮胎花纹进行噪声值预测,从而对花纹的排布方式进行优化,降低轮胎花纹噪声,减少研发成本。
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02
电子制作(2019年11期)2019-07-04
童话世界(2019年14期)2019-06-25
启蒙(3-7岁)(2019年1期)2019-01-03
北京航空航天大学学报(2018年1期)2018-04-20
幼儿教育·父母孩子版(2017年12期)2018-02-28
橡胶科技(2018年7期)2018-02-16
发明与创新(2016年26期)2016-08-22
橡胶工业(2015年4期)2015-07-29
橡胶工业(2015年4期)2015-07-29
