门座起重机自动化在港口的应用
2023-12-23 08:26:58曾钦坚王文龙全晓军
现代食品 2023年19期
曾钦坚,王文龙,全晓军
(深圳赤湾港口发展有限公司,广东 深圳 518062)
1 研究背景和现状
1.1 研究背景
随着全球贸易的不断发展和国际物流的快速增长,港口作为货物流通的重要节点,承担着大量货物的装卸和转运任务。传统港口装卸作业通常依靠人工操作和传统的机械设备,存在效率低下、安全隐患大、操作错误率高等问题。为了提高港口的效率、降低成本、降低事故风险,满足日益增长的运营需求,门座起重机自动化技术在港口得到了广泛的关注和应用。门座起重机自动化是指利用先进的传感器、控制系统、人工智能等技术,实现门座起重机的自动化操作和控制。引入自动化技术可以实现门座起重机的自动导航、自动装卸、自动堆放等功能,提高作业效率、降低人力成本、提升港口的运营安全性。
近年来,国内外许多港口纷纷引进门座起重机自动化技术,并取得了显著成效。然而,门座起重机自动化技术的应用还面临着一些挑战。①门座起重机自动化技术的引入需要投入大量的资金和人力,且需要对港口的设施和流程进行改造和升级。②门座起重机自动化技术需要与现有的港口设备和系统进行无缝集成,确保整个港口运营的协调和顺畅。此外,门座起重机自动化技术的应用还涉及数据安全和隐私保护的问题,需要制定相应的政策和措施进行管理和保护。因此,研究港口门座起重机自动化技术的应用现状、优势、面临的挑战,并提出相应的解决方案,对于推动港口装卸作业的现代化和智能化具有重要意义。
1.2 研究现状和进展
1.2.1 智能化控制系统
门座起重机自动化的核心是智能化控制系统的设计和实现。通过集成传感器、控制器、执行器等设备开发出能够实现自主操作和自动化控制的门座起重机系统。这些智能化控制系统能够实时监测门座起重机的状态和环境信息,根据预设的算法和规则进行自主决策和操作,提高门座起重机的运行效率和安全性。门座起重机智能化控制系统架构如图1所示。
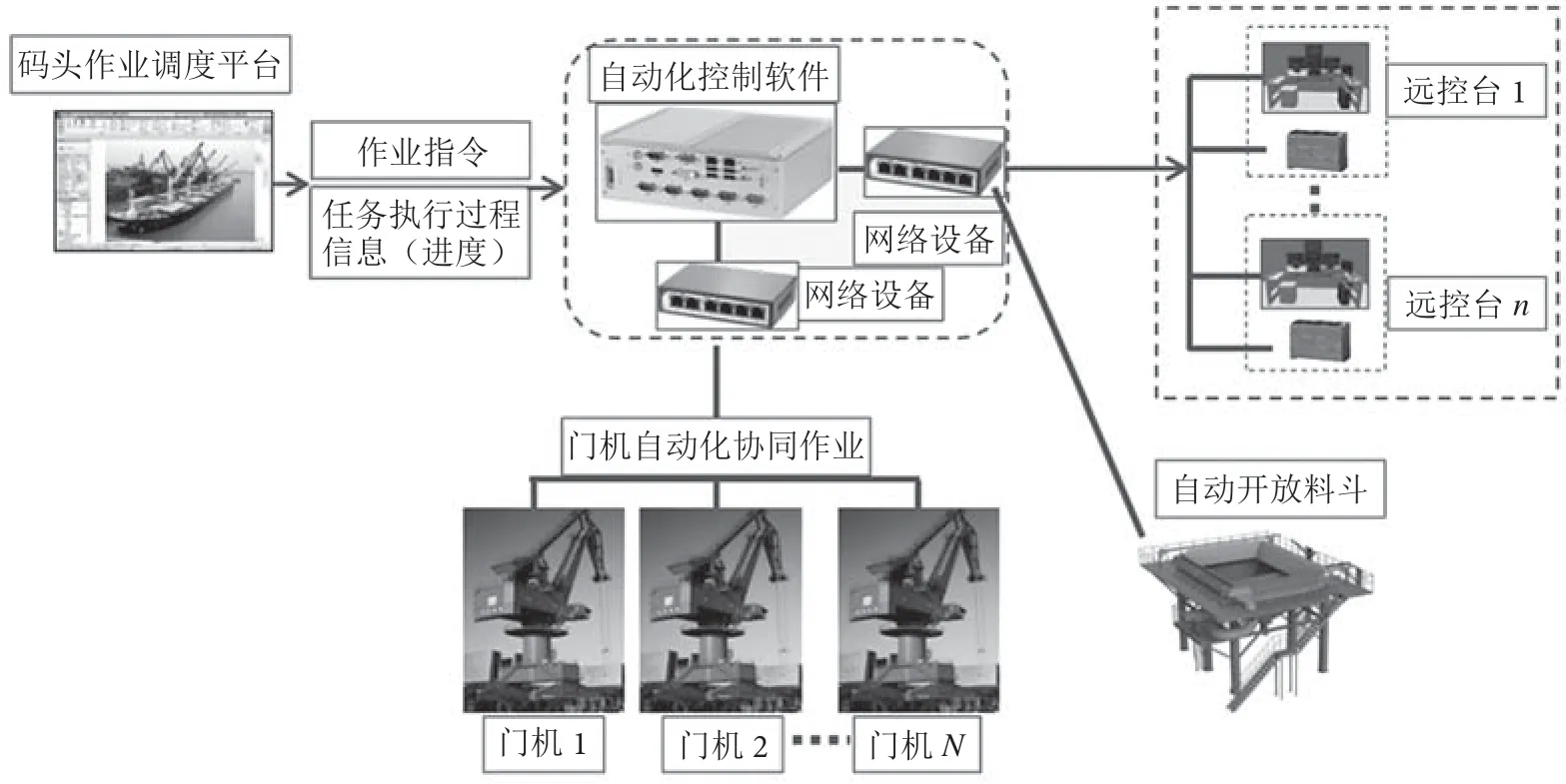
图1 门座起重机智能化控制系统架构示意图
1.2.2 机器视觉技术
机器视觉技术在门座起重机自动化中起到了重要的作用。通过监控设备和图像处理算法,门座起重机可以实时获取和分析装卸作业场景的图像信息。通过机器学习和图像识别等技术[1],门座起重机能够自动识别和定位货物,实现精确的装卸操作,船舶点云模型如图2 所示。

图2 船舶点云模型示意图
1.2.3 无人驾驶技术
无人驾驶技术是门座起重机自动化的重要组成部分。门座起重机通过自动驾驶技术实现无人操作和自主导航。通过精确的地图和定位系统,以及高精度的导航和路径规划算法,门座起重机能自动避开障碍物、规避危险区域,并按照预定的路径进行装卸作业,无人驾驶路径规划如图3 所示。
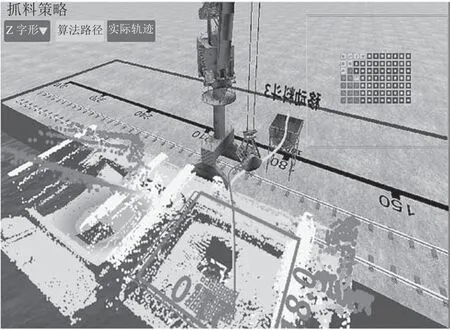
图3 无人驾驶路径规划图
1.2.4 云计算和大数据分析
云计算和大数据分析技术[2]在门座起重机自动化中扮演着重要角色。将门座起重机的数据上传到云端进行分析和处理,可以实现对门座起重机运行状态和性能的实时监测和评估。通过分析大量的数据,可以优化门座起重机的运行策略和参数设置,提高门座起重机的工作效率和可靠性。
1.2.5 安全性和可靠性研究
门座起重机自动化技术的应用需要保证其安全性和可靠性。通过设计安全控制系统、开发故障诊断和预测算法,以及建立安全规范和标准,保障门座起重机自动化系统的安全运行,状态监测和故障诊断示意图如图4 所示。
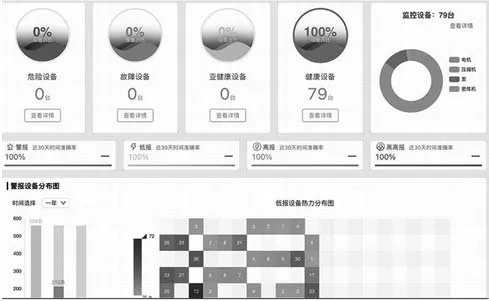
图4 状态监测和故障诊断示意图
综上,门座起重机自动化的研究和进展主要集中在智能化控制系统、机器视觉技术、无人驾驶技术、云计算和大数据分析以及安全性和可靠性研究等方面。这些研究成果的应用将推动门座起重机自动化技术的发展,并为港口装卸作业提供更高效、安全和可靠的解决方案。
2 系统设计
2.1 架构和模块设计
2.1.1 硬件模块
①传感器模块包括各种传感器,如激光雷达、摄像头、压力传感器等,用于获取门座机周围环境和装卸作业的相关信息。②控制器模块负责接收传感器模块的数据,并根据预设的算法和规则进行决策和控制门座机的运动。
2.1.2 软件模块
①智能控制模块。负责门座机的自主决策和控制。通过集成机器学习、路径规划、动态调度等算法,实现门座机的智能化操作。②机器视觉模块。通过图像处理和图像识别算法,实现对货物的识别、定位、跟踪。同时,通过图像分析和模式识别[3],为智能控制模块提供更准确的信息。③导航和定位模块。通过引入地图和定位系统,实现门座机的自主导航和定位。该模块可以利用激光雷达、全球定位系统、惯性导航等技术,为门座机提供精确的位置信息。④数据分析模块。将门座机的数据上传到云端进行分析和处理。通过大数据分析算法,提取有价值的信息,优化门座机的运行策略和参数设置。
2.1.3 网络通信模块
门座机系统需要与其他系统进行数据交换和通信。通过网络通信模块,可以实现门座机与港口管理系统、料斗自动装车系统等其他系统的连接,实现数据共享和协同操作。
2.1.4 安全控制模块
门座机自动化系统需要保证安全性。安全控制模块负责监测门座机的运行状态和环境信息,实时识别潜在的危险和障碍物,并采取相应的措施,确保门座机的安全运行。门座起重机自动化系统的架构和模块设计需要综合考虑硬件和软件的相互配合,实现门座起重机的自主决策、自主导航、自主操作。这些模块的设计和集成将为门座起重机自动化提供基础,并为港口装卸作业提供更高效、安全、可靠的解决方案。
2.2 控制算法和决策逻辑设计
2.2.1 导航算法设计
①路径规划。根据门座起重机的起始位置和目标位置,设计路径规划算法,确定最佳路径。可以使用经典的路径规划算法,如A*算法[4]、Dijkstra 算法、RRT 算法[5]。②避障算法。在路径规划的基础上,设计避障算法,避免与障碍物发生碰撞。可以使用激光雷达或摄像头获取障碍物的位置信息,然后根据避障策略进行规避。
2.2.2 定位和防摇控制算法设计
①定位算法。根据传感器获取的位置信息,设计定位算法确定门座起重机的准确位置。可以使用北斗系统、激光雷达、视觉传感器进行定位。②防摇控制算法。实时获取门座起重机运行过程中起升、变幅、回转等机构的位置和速度信息,结合作业环境、作业工况等因素,对门机的运行状态进行计算和预测,结合路径规划的各个目标点的位置信息,自动生成相应的控制指令,通过各执行机构联动运行,实现防摇控制。抓斗防摇理论基础基于地球上单摆摇摆周期公式为,控制流程如图5 所示。
2.2.3 决策逻辑设计
①装卸任务调度。根据装卸任务的优先级和门座起重机的可用性,设计任务调度算法确定装卸的顺序和时间。可以使用任务调度算法,如最短作业优先或最早截止时间优先。②动作决策。根据门座起重机的位置和物料的位置,设计动作决策算法确定门座起重机的动作,如抓取、放置或移动,可以使用状态机或规则引擎进行动作决策。
2.2.4 安全性设计
①碰撞检测和避免。设计碰撞检测算法和避障策略,确保门座起重机与障碍物或其他门座起重机之间的安全距离。②负载监测和控制。设计负载监测算法和控制策略,确保门座起重机的负载在安全范围内。
通过合理设计控制算法和决策逻辑,可以实现全自动门座机的自主决策、自主导航、自主操作,提高门座机的效率和安全性,为港口装卸作业提供更高效、安全和可靠的解决方案。
3 门座起重机自动化技术的应用前景
3.1 提高运营效率
门座起重机自动化技术可以实现门座起重机的智能化操作和自动化控制,提高装卸作业的效率和准确性。自动化技术可以减少人为因素的影响,提高装卸作业的速度和精度,缩短货物的停留时间,提高港口的吞吐能力。
3.2 提高安全性
门座起重机自动化技术可以减少人为错误和事故的发生。自动化控制系统可以对门座起重机的运行进行实时监控和控制,确保门座起重机的操作符合安全标准和规范。此外,自动化技术还可以通过传感器和摄像头等设备实时监测港口装卸作业的环境和状态,及时发现和处理安全隐患。
3.3 降低成本
门座起重机自动化技术可以降低人力成本和维护成本。自动化门座起重机极大地减少了人工操作,可以有效降低人力成本和培训成本。此外,自动化门座起重机还可以减少设备的维护和修理成本,提高设备的使用寿命和可靠性。
3.4 实现智能化管理
门座起重机自动化技术可以与港口物流信息系统、船舶配载系统、货物追踪系统等进行网络化和互联互通。通过不同系统之间的数据共享和实时通信,实现港口门座起重机与其他系统的无缝对接,实现智能化的港口管理和调度,进一步提高港口的整体运营效率和协同能力。
3.5 环保节能
门座起重机自动化技术注重环保和节能。采用节能设备和智能能源管理系统等技术,可以减少能源消耗和环境污染,实现港口装卸作业的可持续发展。
4 结语
门座起重机自动化技术在港口行业中的应用具有重要的意义。门座起重机自动化技术提高了港口的工作效率和安全性,提升了港口的竞争力。尽管面临一些挑战,但门座起重机自动化技术的应用前景依然广阔。随着科技的不断发展和进步,自动化技术在港口行业中的应用将会越来越普遍,为港口行业的发展带来更多的机遇和挑战。
猜你喜欢
中国特种设备安全(2022年4期)2022-07-08 02:42:40
中国特种设备安全(2018年10期)2018-12-18 02:16:46
石油化工建设(2018年2期)2018-07-11 01:24:56
质量技术监督研究(2018年1期)2018-03-26 08:04:32
质量技术监督研究(2017年4期)2017-05-07 13:32:06
喜剧世界(2016年1期)2016-12-06 18:56:20
意林(2016年10期)2016-05-31 16:36:18
船舶标准化工程师(2015年5期)2015-12-03 11:00:24
机电信息(2015年6期)2015-02-27 15:55:12
筑路机械与施工机械化(2014年4期)2014-03-01 02:58:47