
近红外多普勒差分干涉仪稳定性结构研究
2023-12-18 09:25:14孙剑冯玉涛畅晨光王炜李娟胡炳樑
光子学报 2023年11期
孙剑,冯玉涛,畅晨光,王炜,李娟,胡炳樑
(1 中国科学院西安光学精密机械研究所,西安 710119)
(2 中国科学院大学,北京 100049)
0 引言
星载被动大气风场探测设备,由于不受气候变化和地理位置限制,可以实现全球尺度的中高层大气风场探测[1-4]。基于多普勒差分干涉测风技术(Doppler Asymmetric Spatial Heterodyne,DASH),星载近红外差分干涉测风载荷以氧分子867 nm 为目标探测源,可实现60~85 km 高度中层大气风场探测[5]。作为星载差分干涉测风载荷的核心元件,由于5 m/s 测风精度对应的多普勒频移约为10-5nm,多普勒差分干涉仪(简称差分干涉仪)的稳定性直接影响测风载荷风速测量精度,因此差分干涉仪的高力热稳定性结构已然成为多普勒差分技术的关键核心问题。
针对差分干涉仪稳定性结构研究,国内外相关人员开展了大量的研究,ENGLERT C R 设计了一种弹性支柱与间隔元件结合的柔性结构,实现了低温环境下分体式长波红外差分干涉仪的无应力支撑[6]。BABCOCK D D 设计了一种半运动学夹持结构,通过三个支柱连接上下压板结构,实现了共光路DASH 干涉仪结构固定,并通过被动和主动温控方法提高了差分干涉仪温度稳定性[7]。畅晨光、傅頔等分别从材料补偿和相位稳定性影响因素对差分干涉仪温度稳定性进行研究[8-9]。这些研究仅限于差分干涉仪的温度稳定性,并未研究力学环境适应性。针对差分干涉仪的星载环境力学稳定性结构研究,白玉龙等设计了一种高稳定性低热传导微应力非共光路可见光差分干涉仪固定支撑结构[10],该方法通过提高基频(基频为1 947.15 Hz)的方法实现了可见光差分干涉仪的高力学稳定性固定。由于目标谱线不同,差分干涉仪光谱分辨率不同。若差分干涉仪光谱分辨率提高,差分干涉仪尺寸会随着增大,实现差分干涉仪稳定性固定的最有效的办法是增加胶粘面积,降低粘接面剪切应力。以某星载的近红外实体差分干涉仪为例,相比可见光差分干涉仪,差分干涉仪光学件质量增加了4 倍,采用现有的方法固定安装,尽管增加了光机胶粘面积,但是由于近红外差分干涉仪组件800 Hz 基频偏低,随机振动试验(3.635 Grms)过程中仍然出现了光学件与结构件开胶的现象。同样增大光机胶粘面积,也会提高光学件与结构件的传热系数,不利于差分干涉仪的温度稳定性设计[11]。
本文以某星载测风载荷非共光路近红外差分干涉仪稳定性结构为研究对象,提出一种可以固定支撑不同尺寸差分干涉仪的方法,从力学稳定性和温度稳定性两个因素考虑,优化光学材料热补偿,建立数学模型,优化结构参数,设计弹性系数,调整组件基频,提高组件的力热稳定性。有限元分析和环境试验表征,计算结果与有限元分析及试验结果一致,试验前后干涉条纹频率未发生变化,且结构热应力带来的干涉图畸变可忽略,满足星载环境条件。该方法也可适用于不同尺寸的棱镜式干涉仪的稳定性支撑。
1 差分干涉仪技术原理
多普勒差分干涉仪是在对称式空间外差干涉仪基础上发展起来的一种非对称式差分干涉仪,通过引入一个大的非对称量,实现高的相位灵敏度,从而可以探测到目标谱线的多普勒频移反演出目标视线风速。图1 为多普勒差分干涉技术原理示意图。分光棱镜将入射光线分成两束光线,通过视场展宽棱镜在闪耀光栅处发生衍射,由于两路光路存在一个固定的非对称量2Δd,因此两束光线在出口处存在两个交叉夹角2γ的出射波前,从而在探测器前形成Frizeau 条纹[12]。

图1 多普勒差分干涉技术原理示意图Fig.1 Schematic diagram of the DASH interferometer technique
当入射谱线由于风速ν 引入Doppler 频移,则干涉图相位φ(x)为[13]
式中,Δσ为光谱分辨率,σL为Littrow 波数,θL为Littrow 角,σ0为光束中心波数,x为探测器上位置坐标(x=0即为探测器中心)。
由式(1)可以看出,其相位由两部分组成,其中一部分与零风速波数σ0相关的部分,另一部分与中心波数变化量Δσ相关,则式(1)可写为
式中,φ0(x)=2π[4(σ0-σL)tanθLx+2σ0×Δd]为基准相位;Δφ(x)=2π[4 tanθLx+2Δd]Δσ为风速引起的相位变化量。
通过相位反演去除基准相位,获得多普勒相位变化量Δφ,视线风速υ可由式(2)得出[14]
式中,c=3×108m/s 为光在真空中的速度。
由式(3)可以得出,非对称量Δd越大,相同的视线风速引起的相位灵敏度越高,风速测量精度越高。但非对称量越大会导致差分干涉仪的外形尺寸也越大。
同样,由相位变化量Δφ(x)可以看出,光谱分辨率∆σ与相位变化量成正比。光谱分辨率提高也可以提高相位变化量,从而提高风速测量精度。多普勒差分干涉仪光谱分辨率由式(4)确定
式中,W为光栅尺寸。
由式(4)可知,光谱分辨率提高会增大光栅尺寸,这样同样带来干涉仪主截面尺寸的增大。比如可见光(557 nm)差分干涉仪光谱分辨率设计值为1 cm-1,近红外(867 nm)差分干涉仪光谱分辨率设计值则为0.32 cm-1,因此相比于可见光差分干涉仪(91.5 mm×85.5 mm×40 mm),近红外差分干涉仪的尺寸达到110.5 mm×101.5 mm×50 mm。
2 差分干涉仪稳定性结构研究
2.1 稳定性结构研究思路
差分干涉仪总体结构采用“三明治”形式的固定支撑结构,底座、盖板和支柱组成差分干涉仪的结构框体,为差分干涉仪提供支撑结构,柔性结构(上)、柔性结构(下)与干涉仪光学件通过环氧胶粘接组成负载,柔性结构(上)与柔性结构(下)为弹性件,柔性结构分别与底座和盖板通过螺钉连接,图2 为柔性结构的模型示意图。
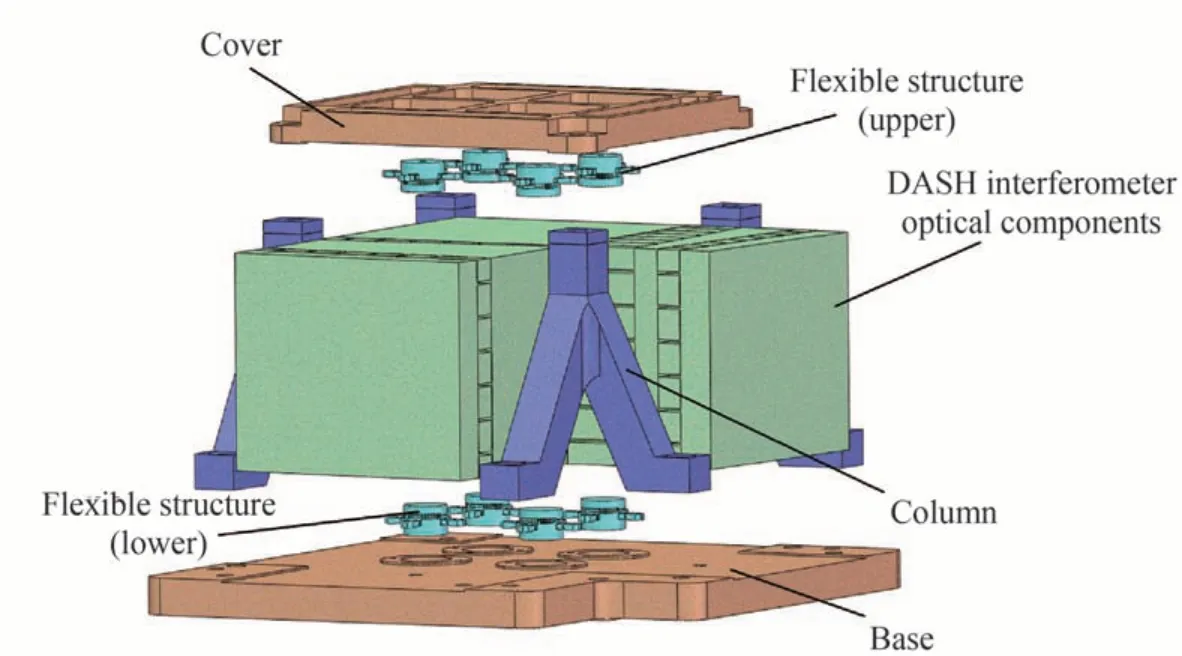
图2 差分干涉仪支撑结构示意Fig.2 Diagram of the DASH interferometer structure
以柔性结构最大结构应力和粘接面最大剪切应力为优化目标,差分干涉仪柔性结构研究从以下几点开展分析:1)差分干涉仪由不同材料的光学元件粘接而成的实体干涉仪,因此首先需要材料热补偿设计提高光学件的温度稳定性[15];2)建立数学模型优化设计柔性结构参数,合理设计弹性系数K,调整差分干涉仪组件基频,降低粘接面最大剪切应力。3)柔性结构最大结构应力须小于材料的许用应力,光学件与柔性结构胶粘面、光学件内部胶粘面应力须小于粘接胶的许用应力,且有一定的安全裕度;4)支撑结构能够降低热传导,且外界环境变化产生的热应力不会引起面形变化。
图3 列出了支撑结构优化设计的具体思路。

图3 参数优化过程Fig.3 Optimization process of parameters
2.2 光学参数热补偿设计
图4 为差分干涉仪光学件结构示意图,差分干涉仪包含分光棱镜(BS1、BS2)、视场展宽棱镜(P1、P2)、楔形间隔元件(S1、S2)、平行间隔元件(PPS)和光栅(G1、G2)等。视场展宽棱镜可以改变入射和出射角度,从而改变基础光程差(非对称量)[16],因此优化设计视场展宽棱镜的材料和中心厚,以及楔形间隔元件(S1、S2)材料和中心厚度可以补偿两臂随外界环境变化产生的热漂移[8]。

图4 差分干涉仪Fig.4 DASH Interferometer
差分干涉仪的基础光程差OPD与光学元件中心厚度及材料折射率相关,当环境温度发生变化∂T,则基础光程差随温度变化量为
式中,n0=1 为真空介质折射率,S1和S2为长短臂间隔元件中心厚度,n为视场展宽棱镜的光学材料折射率,L1和L2为长短臂视场展宽棱镜中心厚度。
线膨胀系数αm与材料的中心厚lm关系为
则式(5)可改写为
式中,αS1为长臂间隔元件材料线膨胀系数,αL1为长臂视场展宽棱镜材料线膨胀系数,αS2为短臂间隔元件材料线膨胀系数,αL2为短臂视场展宽棱镜材料线膨胀系数。
依据式(7)优化差分干涉仪的光学材料和设计参数,降低了基础光程差(非对称量)受环境温度的影响。表1 为近红外差分干涉仪光学设计参数,

表1 差分干涉仪设计参数Table 1 DASH interferometer design parameters

表2 三个方向的基频Table 2 Natural frequencies in three directions.
2.3 稳定性支撑结构优化设计
差分干涉仪与支撑结构通过柔性结构与分光棱镜(环氧胶8217)粘接固定,依据结构材料和光学材料线膨胀系数一致的原则,分光棱镜光学材料选用融石英(热膨胀系数0.5×10-6/℃),柔性结构采用低膨胀系数的Invar 材料(热膨胀系数为0.6×10-6/℃)。柔性结构由两部分组成,粘接面和圆周的四个翅膀。柔性结构的弹性系数K分成两部分,翅膀位置弹性系数K1和粘接面位置弹性系数K2。图5 为柔性结构示意图。

图5 柔性结构示意图Fig.5 Schematic showing geometry of the flexure
因此柔性结构弹性系数K可表示为
式中,YZ为材料杨氏模量,h1为翅膀厚度,b为翅膀宽度,l为翅膀长度,n为翅膀组数,α为隔板角度,R为粘接面半径,h2为粘接面厚度,θ为粘接面所占的角度,如图5 所示。
差分干涉仪光学件与柔性结构粘接固定,随机试验过程中,粘接面会发生弯曲变形。图6 显示了粘接面发生弯曲变形的示意图。优化粘接面的厚度h2从而减小粘接面形变ω(≤1 μm)导致的粘接面脱胶现象,粘接面的厚度由式(9)优化得出

图6 粘接面弯曲变形示意图Fig.6 Schematic illustration of the bonding surface bowing effect
式(9)代入式(8),则柔性结构弹性系数K变为
底部柔性结构尺寸:YZ=145×103MPa,h1=1.5 mm,h2=1.75 mm,b=1.6 mm,α=π/10,l=2.43 mm,n=2,θ=π/4;顶部柔性结构尺寸:h1=1 mm,h2=1.5 mm,b=1.3 mm,α=π/13,l=2.43 mm,n=2,θ=π/4。
因此,底部柔性结构的弹性系数Klower=52 000 N/mm,顶部柔性结构的弹性系数Kupper=12 400 N/mm,由于底部柔性结构还起定位作用,因此在Z方向上Klower大于Kupper。
依据柔性组件系数KT和固有频率关系,优化组件弹性系数可以调节组件的基频fres,其中,KT=Klower·Kupper/(Klower+Kupper),从而控制光学件的加速度响应不高于30 Grms。
按照3σ 要求,则光学件承受加速度a=90g,依据振型有效质量因子,单个柔性结构受力(最大受力)Fmax=62.7 N,代入式(11),单个柔性结构承受的最大剪切应力τmax及柔性结构与分光棱镜粘接面的最大剪切应力σmax为
则单个柔性结构承受的最大剪切应力τmax=48 MPa,远远小于Invar 的材料许用应力,柔性结构与分光棱镜粘接面的最大剪切应力为σmax=1.4 MPa,远远小于8 217 环氧胶的粘接强度。
3 有限元分析及试验验证
3.1 有限元分析
3.1.1 力学稳定性分析
建立差分干涉仪组件有限元模型,分析干涉仪组件基频及随机振动,验证理论分析的正确性,表3 列出了差分干涉仪结构件和光学件材料参数表。
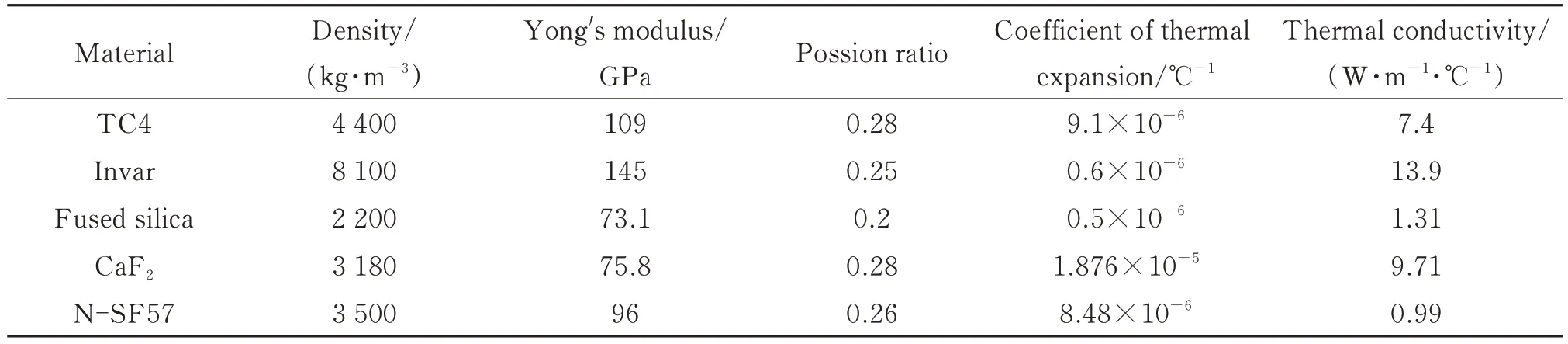
表3 材料参数Table 3 Material properties
分析差分干涉仪组件的基频,表4 为差分干涉仪组件三个方向基频的有限元分析值,三个方向的基频均大于100 Hz,满足星载力学环境要求。

表4 有限元分析三个方向基频Table 4 Natural frequencies of FEM in three directions
从统计学角度分析随机振动条件下的组件响应及动力学特性。表5 为随机振动试验输入条件。输入条件依据测风载荷设备在卫星力学试验条件下,差分干涉仪组件安装面处的加速度响应值

表5 随机振动输入条件Table 5 Random vibration test conditions
有限元分析计算得出,结构件最大应力(τmax)为65.56 MPa,发生在柔性结构翅膀处,与理论计算结果一致,光学元件最大应力为0.56 MPa,均小于材料的抗拉强度。表6 列出了随机振动条件下的应力分析值。

表6 应力分析值Table 6 Stress of FEM
柔性结构胶粘处最大剪切应力(σmax)为3.4 MPa,相较于结构胶粘处环氧胶(8 217)抗剪强度14 MPa,安全系数3.4,安全系数大于1。同理,光学胶粘处最大剪切应力0.2 MPa,相较于光学胶粘处所用的紫外光敏胶(NOA61)抗剪强度20 MPa,安全裕度为83.3,安全系数大于1。因此柔性结构有较高的安全裕度。
3.1.2 温度稳定性分析
柔性结构与盖板和底座通过柔性结构的翅膀连接,相比现有结构接触面积减小了75%,同时盖板和基座材料由Invar 改为导热系数更低的钛合金材料,因此柔性结构的热阻提高了7.5 倍,降低了传热效率,提高差分干涉仪的被动绝热温控。但是由于柔性结构与盖板的结构材料不同,且差分干涉仪的工作温度要高于测风载荷主体温度约5 ℃,因此需要分析环境温度变化5 ℃工况下,温度变化带来的热应力对差分干涉仪的面形的影响,尤其是分光棱镜将一束光分切成两路光线,若分光棱镜两路出射面的面形随着环境温度发生变化,产生畸变导致干涉条纹弯曲,进而引入额外的多普勒频移从而影响测风精度[9]。图7 分别为长臂和短臂分光棱镜出射面的面形云图。表7 列出了温度变化5 ℃分光棱镜长短臂处出射面的面形PV 和RMS 值。由于面形RMS 最大变化1.671 nm(1/519 工作波长),因此,支撑结构的热应力对面形产生的畸变可忽略[17]。

表7 PV 值和RMS 值Table 7 PV and RMS

图7 近红外差分干涉仪组件的面形变形云图Fig.7 Surface shape cloud picture of the DASH interferometer assembly in near-infrared
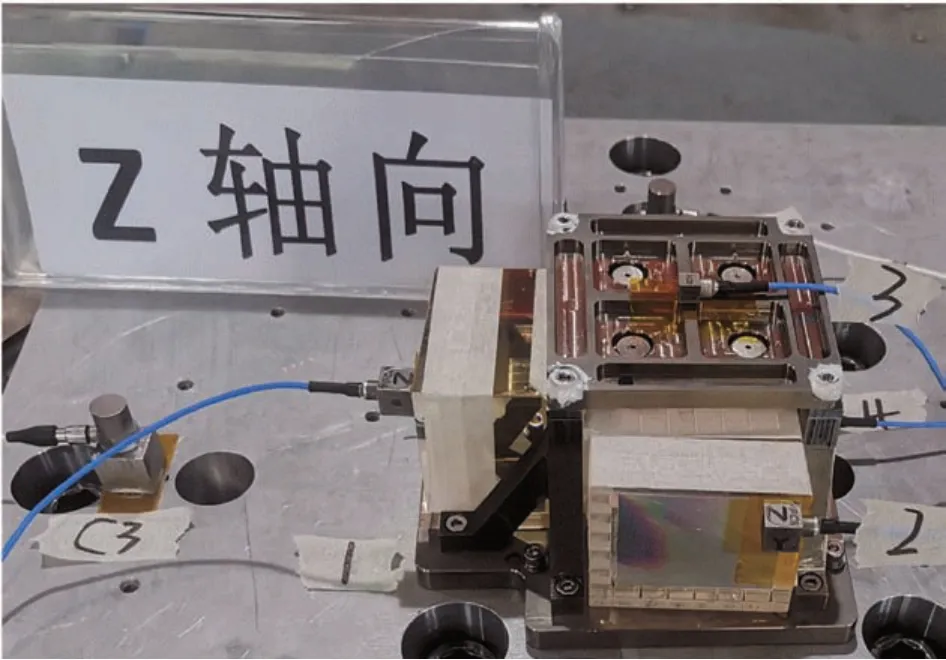
图8 近红外差分干涉仪振动试验Fig.8 Vibration tesing of the DASH interferometer assembly in near-infrared
3.2 力学试验验证
为了进一步了解差分干涉仪的力学稳定性,验证理论计算与有限元分析的合理性和准确性,设计了一个包含正弦扫频和随机振动的试验,正弦扫频用于了解差分干涉仪组件的三个方向固有频率,随机振动用于了解差分干涉仪的力学性能。正弦扫频输入条件依据卫星对测风载荷设备的正弦扫频输入条件。差分干涉仪两臂端部分别贴有三向加速度传感器,用于监测差分干涉仪光学件加速度响应情况,图7 是差分干涉仪测点位置图片。测点1 和测点2 的位置相对支撑点有一定的臂长,在随机试验过程中,作为负载会产生额外的力矩。因此,增加三向加速度传感器模型,修正有限元模型,表8 为有限元分析和0.2g扫频试验的三个方向基频结果对比,与力学试验值相比,有限元分析值偏差小于4%。

表8 有限元分析的三个方向基频和扫频试验结果对比Table 8 Comparison of natural frequencies of modal analysis and test
设计X、Y、Z三个方向的随机振动试验,重点关注两臂端部加速度响应值,相比于输入的加速度均方根值(3.535 Grms),试验结果显示X、Y、Z三个主振方向的加速度均方根分别为17.71 Grms、23.4 Grms 和28.91 Grms。其中最大加速度响应与数学模型计算分析的加速度输入条件一致。随机试验前后,扫频数据曲线一致,光学件和结构件间胶合面未开胶,差分干涉仪组件完好。
力学试验前后,通过光路测试差分干涉仪的干涉条纹频率,通过对比干涉条纹频率,判断光学元件间胶合面状态,光学测试结果表现为力学前后干涉条纹空间频率发生变化(50 个条纹数),光学元件间胶合面未开胶。因此差分干涉仪柔性支撑结构满足力学环境条件。图9 显示了差分干涉仪测试光路示意图、干涉条纹及试验前后干涉条纹空间频率对比。图9(c)中的相位差异是由差分干涉仪组件复位安装精度引起的。
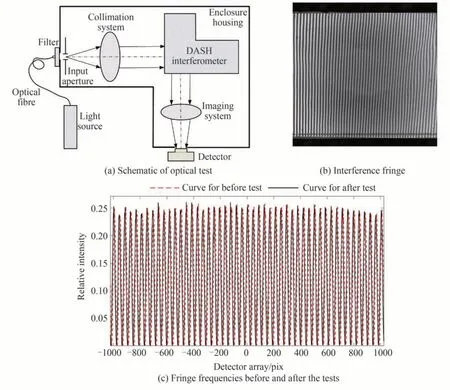
图9 力学前后光学测试示意图Fig.9 Schematic of optical test before and after the tests
4 结论
随机振动试验的能量主要集中在低频范围,因此,为了提高组件的力学性能,需要将组件的基频设计值提高。差分干涉仪现有支撑结构是通过增加粘接面积的方法提高组件的力学性能,当干涉仪尺寸增大,需要增大粘接面积,这就和增加热阻相悖。同时近红外差分干涉仪支撑结构,出现了力学试验过程中光机粘接面开胶现象。针对这个问题,本文以近红外差分干涉仪的稳定性结构为研究目标,采用材料热补偿方法完成了高热稳定性的差分干涉仪光学设计,并提出了一种优化设计柔性结构弹性系数调整组件的基频方法,从而降低粘接面的粘接应力。该方法以柔性结构机械应力和光机粘接表面粘接力小于许用应力为优化目标,通过建立数学模型,优化近红外差分干涉仪柔性结构的材料和尺寸,相较于差分干涉仪现有固定支撑方法,解决了大尺寸差分干涉仪的高稳定性绝热支撑问题,柔性结构的热阻提高了7.5 倍。有限元分析结果表征,结构件和光学元件间,及光学元件间的环氧胶粘处的粘接应力具有一定的安全裕度,环境温度变化5℃工况下,支撑结构的热应力支撑结构的热应力带来的干涉图畸变可忽略。力学振动试验表征了差分干涉仪支撑结构满足航天力学适应性,该方法同样适用于棱镜式干涉仪稳定性支撑结构。
猜你喜欢
天水行政学院学报(2022年4期)2022-11-18 09:02:36
中国人民公安大学学报(自然科学版)(2022年1期)2022-07-20 02:51:14
九江学院学报(自然科学版)(2022年2期)2022-07-02 02:34:06
新疆大学学报(自然科学版)(中英文)(2022年2期)2022-03-27 02:08:08
山东交通科技(2020年2期)2020-08-13 09:24:06
计测技术(2020年6期)2020-06-09 03:27:14
少儿美术(快乐历史地理)(2020年4期)2020-02-24 13:06:28
航天电子对抗(2019年4期)2019-06-02 08:22:40
学苑创造·A版(2019年4期)2019-05-10 00:19:52
制导与引信(2017年3期)2017-11-02 05:16:58
