新能源汽车车联网关键技术与网联控制平台的设计实现研究
2023-12-15 04:28陈璜
苏州科技大学学报(工程技术版) 2023年4期
陈 璜
(集美大学 诚毅学院,福建 厦门 361000)
新能源汽车自动驾驶的行驶定位跟踪、自动泊车的误差产生,取决于车辆当前时刻的行驶速度、前后轮转角偏差等因素。基于LQR 线性二次型调节器控制、MPC 模型预测控制等方法的车辆行驶循迹控制均属于非预瞄控制方法,建立的车辆运动学跟踪误差模型的行驶跟踪控制精度低、算法实现过程较复杂。基于5G通信网络、TCP/Ntrip 通信协议支持下,使用单目(双目)摄像机、感知传感器、车辆执行器等车辆内部装置监测空间环境信息,并基于Pure Pursuit 行驶跟踪控制算法测得车辆行走位置、转向预瞄点横向偏差以此确定前轮转角,控制大曲率半径下车辆转向的预瞄距离。建立涵盖自动驾驶服务、通信连接服务、任务管理、安全管理等功能模块的车辆云控服务系统,并依托云端平台、ApriITags 局部定位算法的计算能力,收集区域限定场景的车辆泊车状态数据、进行自动泊车控制,以实现最小化成本下网联车辆系统轨迹跟踪、泊车定位的最优控制。
1 面向城市行驶控制的新能源汽车车联网关键技术
1.1 基于端到端(end-to-end)的自动驾驶技术
传统基于规则(rule-based)自动驾驶技术的实现,通常基于激光测距雷达、GPS 定位等传感器采集的行人目标位置信息、路沿位置信息、障碍物位置信息、车道检测信息,由轨迹控制(Trajectory Tracking control)系统规划合适的行驶路线、提供车辆运动位姿方案,但由于rule-based 规则技术是以车辆本身为感知视角,其系统实现的复杂度过高。这一现实状况下,采用基于卷积神经网络的端到端自动驾驶方案,将摄像机拍摄的环境图像映射为自动驾驶汽车的行驶命令,包括直行命令(1/s)、转向命令(1/r)。根据图1 的端到端自动驾驶信号训练方法,在利用前向单目摄像机捕捉到运动的原始图像(Video)后,先对图像作出语义分割(Dilated FCN),使用卷积神经网络(LSTM)将分割后的原始图像映射为汽车自动驾驶的行驶控制命令(Motion),运用自动损失函数(Seg-Loss)对图像边缘部分的给定像素指标作出调整[1]。此过程中利用摄像头、GPS 激光测距雷达等设备捕捉到的运动轨迹(Moving Path),利用每帧图像的摄像头数据、激光雷达数据输出目标点位置,通过端到端的神经网络模型(FCN-LSTM)设置不同训练信号的网络权重,采集与训练单一图像像素、行驶指———————令及转向命令,用于预测汽车连续行驶的控制范围数据集、动作损失状况。

图1 新能源汽车端到端自动驾驶技术原理
1.2 RTK-GPS 的车辆行驶载波精准定位技术
城市区域汽车行驶的高精度定位通常采用“GPS+INS”的惯导系统定位方案,定位精度约为10~20 cm 左右,但高精度惯导系统成本过高,因而在GPS 定位技术基础上提出结合动态载波相位差分技术(Real time kinematic)、多传感器V-SLAM 图像提取技术的定位方案。在楼宇、地面、地下通道等城市空间设置多个载波采集的基准测量站,将两个基准测量站采集到的载波相位观测量信息、相位差分值信息发送至用户接收机。依托V-SLAM 视觉提取技术、摄像头、红外传感器等软硬件拍摄城市的道路空间环境信息,使用EKF 滤波器观测到多帧图像的三维特征图、跟踪与提取摄相机关键帧BA(实时数据),模拟城市道路场景图像如图2所示[2]。由前台线程对相机跟踪的关键帧运动参数作出优化,后台线程提取关键帧特征点三维特征、并与ORB 三维地图的特征点作出匹配,利用局部窗口移动判断图像灰度的变化,比较相机关键帧图像的像素灰度、纹理等要素与模拟场景图像(参考帧)的相似度,实现V-SLAM 视觉图像提取的高定位精度。

图2 基于V-SLAM 技术的城市道路模拟场景图像
2 新能源汽车网联云控平台的设计与功能实现
2.1 车辆网联云控系统的组成架构设计
基于车载摄像头、RTK-GPS 高精度定位器、IMU 传感器等感知设备,以及CAN 总线、VCU 整车控制器等网络通信技术建构起车辆网联云控服务系统,接收车辆行驶的定位信号、车辆测距信号、转向信号、转弯制动信号,由ROS 工作进程组将车辆轨迹跟踪定位、自动泊车的处理图像与数据上传至云端服务器,通过融合图像处理实现多个任务进程的同步执行。使用互相独立的Car secret token manager 车辆管理协议、Task tokenmanager 任务协议,实时处理计算新能源车端数据、提供任务控制服务,做出车辆数据采集、车辆状态监控、自动驾驶的任务处理[3]。因而车联网云服务控制端作为新能源车辆行驶数据传输、任务管理的资源容器,由车端驾驶管理系统负责实时数据的计算处理、指令任务响应,再由云端服务平台处理所有非实时的感知计算任务,具体云控服务组成架构如图3 所示。

图3 新能源车辆网联云控系统的软件服务架构
2.2 车辆网联云控系统的功能模块及实现
(1)用户身份认证与资源授权模块(Security Manager)。为保证外部用户对车辆客户端的安全访问要求,设置网联车辆身份认证、安全管理模块。使用Token 登录信息验证机制向实体客户作出web 访问、数据资源使用及处理的授权,由后台服务器端验证用户名、密码,并生成客户调用API 请求的数据指令、token 身份验证信息。采用明文数据加密方式加密用户登录流水号,当用户再次登录网联车辆客户端时可识别与认证用户流水号[4]。
(2)连接服务模块(Connection Service)。连接服务模块为新能源车辆网络通信、接口调用及任务执行的管理模块,通常包括系统调度与调试、连接管理、网络服务等组成结构。当连接服务模块收到底层资源管理容器的数据访问、连接服务请求后,由网络服务器(Netty Server)负责处理数据分包与解码请求、数据下发网络连接请求[5]。由上层连接管理器基于TCP/Ntrip 网络通信协议接收下层传送的解码数据,为网络连接请求、数据传输提供统一的调用接口,将车辆图像字节信息(channel)封装到任务请求中,并交由系统调度与调试器(AsyncDispatcher)作进一步处理。
(3)任务管理器模块(Task Manager)。车辆网联云控服务端的任务管理器模块被用于某一时间周期内的车辆多种控制任务的执行管理。首先任务跟踪服务子模块设置Push、Pull 两种队列消息发送/接收模式,负责提供统一的任务启动、任务进度、任务结束接口[6]。Pull 模式是由任务跟踪服务器端主动从车辆云控端获取任务消息,Push 模式是在任务跟踪服务模完成车辆行驶任务的处理后,经由数据IP 地址将行驶定位跟踪结果发送至客户端。任务启动/停止服务(Task Launcher/Stop Service)子模块负责对正在执行的任务作出启动/终止命令描述,通过自定义部署命令为多种任务的快速执行提供支持;在车辆行驶、转弯等控制任务执行失败时,由任务存活管理器控制客户端重启或放弃执行失败的任务。
(4)自动驾驶服务模块(Autonomous Driving Service)。基于RTK-GPS 卫星辅助定位技术确定车辆道路行驶的空间位置,采集道路图像的经度、纬度和高度信息,将其转换为坐标系的(X、Y、h)点坐标。利用VSLAM 视觉图像提取技术、回环检测技术作出当前帧图像的滤波噪声去除、ORB 特征点提取,提取得到图像轮廓点、暗区域亮点和亮区域暗点[7]。
在三维空间由多个基准测量站采集行驶过程中的载波信息,将提取图像点与城市道路模拟帧(参考帧)图像点作出匹配,整合提取图像的关键帧和关键点,得到车辆在所有停靠点的定位数据。依据不同道路的弯道曲率半径、限制速度等信息作出车辆行驶轨迹、行驶目的地规划,生成合适的车辆速度、转弯轨迹曲率数据,为新能源汽车的道路行驶轨迹跟踪、转弯提供支持,具体车辆自动驾驶的路径规划与控制如图4 所示。
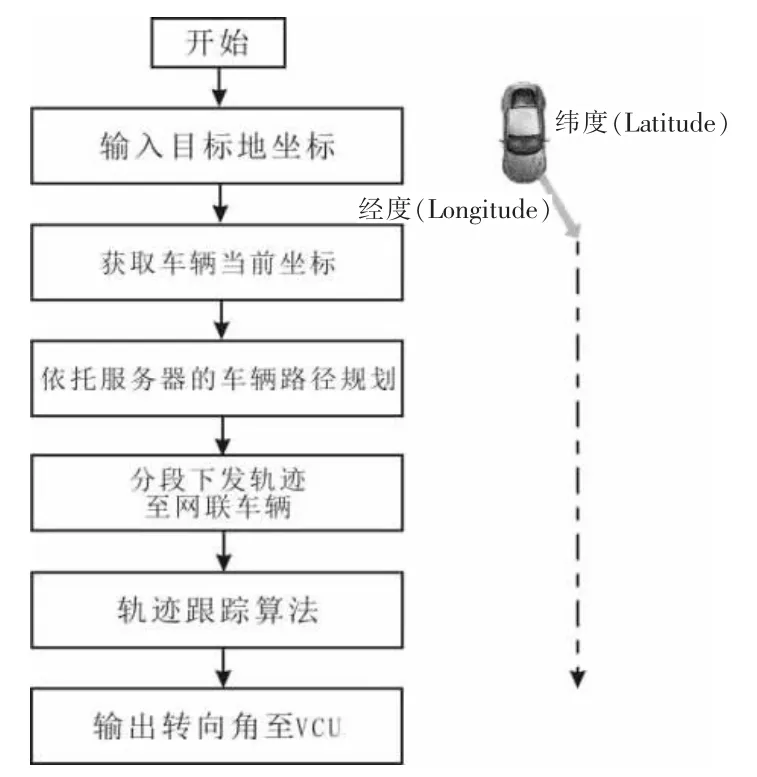
图4 车辆自动驾驶的路径规划与控制流程
3 基于Pure Pursuit、ApriITags 算法的车辆行驶跟踪与泊车定位
3.1 基于Pure Pursuit 算法的车辆行进轨迹跟踪
以车辆单轨轨迹为模型、车辆纵向车身为切线,使用Pure Pursuit 算法作出新能源车辆目标定位的跟踪计算。选取含有直路、弯道的复杂路径控制车辆前轮转角使其沿着目标路点的圆弧行驶(如图5 所示)[8],假设车辆坐标系xoy 中车辆前轴位置到预瞄点(前方跟踪点)的距离为Ld、预瞄点坐标位置为(goal_x,goal_y),车辆航向角为θ、行进道路曲率为k,则应先根据计算式(1)、式(2),将车辆坐标系xoy 的预瞄点转换为大地坐标系XOY 预瞄点,求得xoy 坐标系内车辆的内侧前轮转向角为δ。
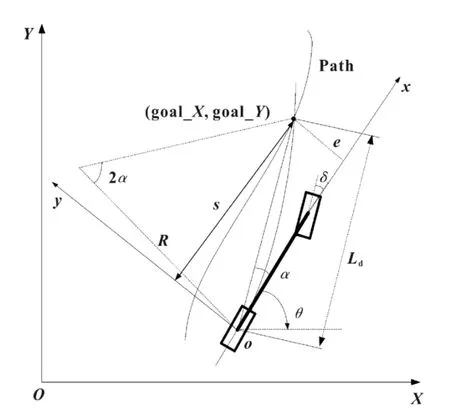
图5 Pure Pursuit 算法的车辆行进轨迹跟踪
真实情况下车辆高精度摄像的轨迹定位与实际参考轨迹存在横向偏差,若车辆前轮与参考轨迹横向偏差(偏心率)为e、与车辆预瞄点距离为s,与参考轨迹横向偏差的成立条件为式(3),则可进一步求得xoy 坐标系内车辆的前轮转向角δ 见式(4)。
在新能源自动驾驶平台采集车辆转向角δ、目标路径的经纬度数值后,需将车辆坐标系xoy 中的车辆点位置转换为大地坐标系XOY 位置[9]。假设车辆参考轨迹Lat 在大地坐标系内的经度值、纬度值分别表示为Lon、Lat,I、B 分别为经度和纬度系数,结合车辆行进道路曲率k、前轮与参考轨迹偏心率e 可得大地坐标系中的车辆定位位置见式(5)。
3.2 基于ApriITags 算法的车辆泊车定位
在虚拟CAT Vehicle 三维环境内,选取ApriITags 算法作为车辆标签识别与登记的定位方案,设置不同区域车辆停靠的AprilTags1、2、3、4、5 号标记标签。利用后置摄像头、ApriITags 高精度局部定位方法识别车辆泊车位置尾部的ApriITags 标记目标,记录无人停车场的车辆ApriITags 视觉定位位姿(AprilTags Detection Node)、车轮转角控制命令(Parking Generation Node)等物理量,完成垂直或平移泊车实验[10]。在拍摄视频帧的整幅图像内识别AprilTags 标签,根据不同时刻车辆的运行状态获得实时反馈,计算后一帧图像相比前一帧的滤波增益K。基于滤波增益K、观测变量矩阵Z 更新某一时刻车辆位置的先验估计状态x、y,更新误差协方差,计算公式为
其中x-、y-分别表示前一帧图像中的车辆位置,U(k)表示某一时刻系统的控制函数,A 和B 表示为图像噪声增益矩阵,H 表示后验状态估计(x、y)相对于观测变量矩阵Z 的增益矩阵。通常情况下泊车车位的长度为5~6 m、宽度为1.5~2.5 m,假设m 为车辆与泊车目标位置的水平距离、n 为车辆尾部与泊车位置的垂直距离、c 为车辆尾部与后轮的距离,rmin为车辆的最小转弯半径,b0和b1分别为车辆入库时与水平控制边线间的距离、入库后与竖直控制边线间的距离,则通过不断检测IMI1 的航向角变化,可判断出车辆是否完成泊车,具体计算公式如下
4 新能源汽车车辆定位、行驶速度、转弯角度的仿真实验
4.1 仿真实验设置
借助ROS 机器人系统架构、Gazebo 仿真工具、CAN 控制总线、车辆执行器等软硬件,设置Gazebo 网络虚拟环境中车辆定位、自动泊车的仿真实验。利用CAT Vehicle 测试程序建立可视化的仿真车辆运行环境,在虚拟环境中仿真出全尺寸的房屋、道路Escape 车辆等组成要素,添加车辆上的摄像头、毫米波雷达、IMU位姿传感器等装置。在车辆停靠的不同区域位置标记1、2、3、4、5 号的AprilTags 标签,在此基础上作新能源车辆的自动泊车仿真实验,实验达标标准为泊车位置距离ApriITags 标签为“1m”,车辆位置误差控制在、航向角度误差小于3°,ApriITags 视觉定位自动泊车实验的仿真效果如图6 所示。
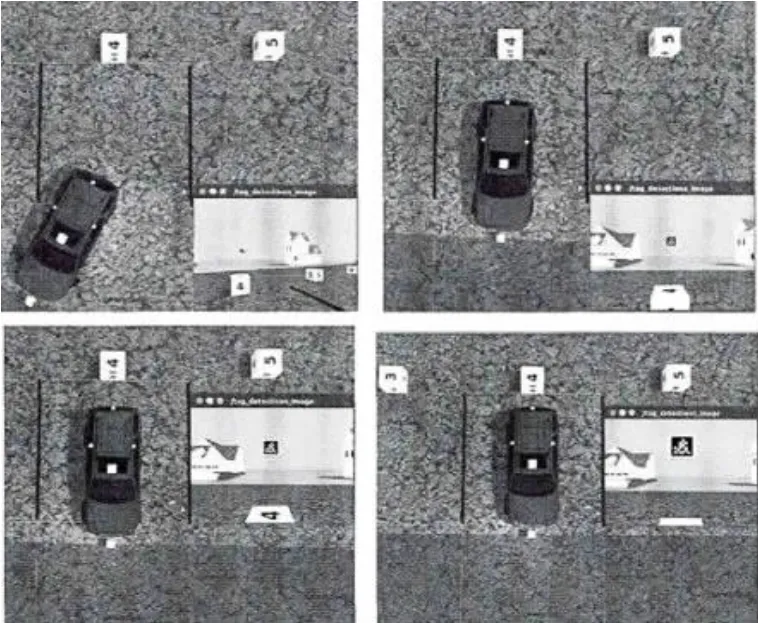
图6 ApriITags 视觉定位自动泊车实验的仿真效果
4.2 自动循迹驾驶仿真实验结果
基于CarSim 软件建立整车的转向、制动物理模型,基于Simulink 仿真分析软件对曲线道路中车辆自动循迹行驶作出仿真实验。假设整车质量为1 200 kg、路面附着系数为0.9,在单向双车道道路下基于Pure Pursuit 算法输入规划路径长度1 000 m,实验工况车速20 km/h、30 km/h、50 km/h,使车辆分别在低速、中速、高速的工况下行驶。使用高精度差分INS 惯导系统,每0.1 s 对自动循迹行驶的车辆实时位置作出1 次定位,得到近似S 形的弧线路径的位置信息。使用车辆前轮与预瞄点的横向偏差计算公式[e(k)-e(k-1)]/T、δ=artan=artan(Lk),路径跟随运动控制公式u(j)=k,得出不同工况下车辆自动循迹驾驶的横向位移偏差、转向角δ、路径跟随仿真结果如图7 所示和表1 所列。

表1 车辆自动循迹驾驶的横向位移偏差、转向角δ、路径跟随仿真实验
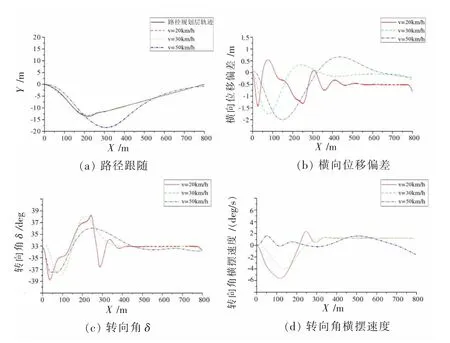
图7 车辆自动循迹驾驶的横向位移偏差、转向角δ、路径跟随仿真实验
车辆云控系统的最大横向位移偏差限制为3 m/s,车辆物理量采集频率为20 Hz,每次行驶约产生100个采集定位点。由表1 可知,基于Pure Pursuit 算法、综合控制器的车辆自动循迹驾驶,在20 km/h、30 km/h等中低速工况下的整体路径跟随效果更好,跟随车辆前轮、被跟随车辆预瞄点之间的横向位移偏差更小;但中低速工况下跟随车辆的转向角δ=33.0~39.0、转向角横摆速度更大,表明车辆的侧向动力学稳定裕度、转向灵活性高,而高速工况下车辆的转向角、转向角横摆速度更小,表明此时车辆自动循迹驾驶的稳定性较差。因而中低速工况下车辆自动循迹驾驶的横向位移偏差、转弯角度等仿真实验结果符合自动驾驶汽车路径跟踪控制要求,且跟随车辆的横向位移偏差、车辆行驶速度间呈现正相关关系,在不同道路曲率k 下,通过采用中低速的车辆行驶速度,可有效保障自动循迹驾驶跟踪精度。
4.3 自动泊车仿真实验结果分析
在虚拟CAT Vehicle 三维环境中进行垂直泊车、平移泊车、精细调整的10 次仿真试验,车辆泊车速度限定在0.2 m/s 左右,记录仿真车辆的ApriITags 视觉定位位姿(xvi,yvi,zvi,yawvi)、车轮转角控制命令(velocity,steer)等物理量。从图6 结合车轮在某一时间序列内的转角控制命令(如图8 所示)可得车辆垂直泊车完全进入车位,而平移泊车与ApriITags 标签的距离、航向角度未达到精度要求,在精细调整泊车后满足仿真实验的精度要求。
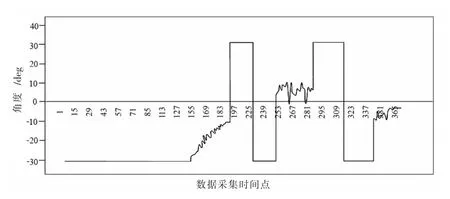
图8 数据采集时间序列内的车轮转角控制角度
根据以上图8 可得网络虚拟空间垂直泊车仿真的第一阶段,车轮转角为左偏置30°恒定,而后依据车辆后置摄像头对停车位AprilTags 标签的图像检测,启动控制命令逐渐调整车轮转角。第二阶段平移调整的车轮转角角度仍为30°,但转角方向与之前相反,第三阶段则为细微的车辆位姿控制调整。
基于RTK-GPS 载波精准定位计算并确定车辆的相对位姿(xreal,yreal,zreal,yawreal),对比AprilTags 视觉定位偏移量与车辆实际横向(纵向)偏移量之间的误差大小,具体数据采集序列点的仿真结果如图9、图10所示。
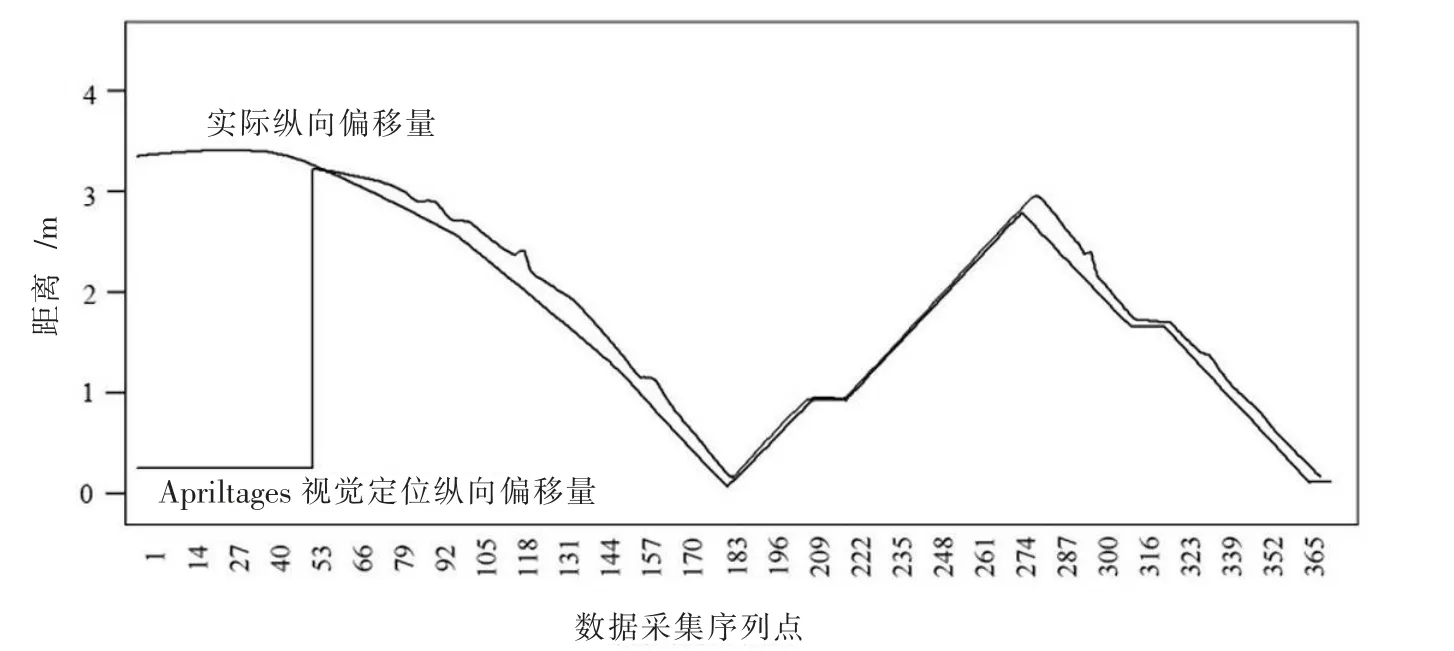
图10 AprilTags 视觉定位与车辆纵向偏移量对比
由以下图9、图10 可得在车辆泊车不同环境空间序列点采集数量为55 以上情况下,车辆实际横向(纵向)偏移量,与AprilTags 视觉定位横向(纵向)偏移量的对比误差逐渐减小,其中第一个波峰阶段之前对应的时间点为车辆垂直泊车时间点,图9 第二个波峰对应时间点为车辆泊车的横向调整时间点,最终AprilTags视觉定位偏移量与实际偏移量的距离趋于0。
5 结语
新时代新能源汽车的智能物联网服务功能实现,需建构完善的网联城市路况监测、自动驾驶系统。针对汽车行驶测试园区的限定场景,借助云端计算平台设置低成本的行驶控制方案,将网联车辆云控平台作分布式解耦,利用车辆控制的不同功能模块形成新能源汽车内部软硬件、网络云控服务平台连接,加强不同模块间的数据传输与指令控制,可大大提升网联汽车的数据信息交互效率、行驶控制质量。
猜你喜欢
汽车实用技术(2023年10期)2023-06-14
汽车实用技术(2022年19期)2022-10-19
汽车实用技术(2022年7期)2022-04-20
内燃机与配件(2022年2期)2022-01-17
高技术通讯(2021年3期)2021-06-09
学生天地(2020年5期)2020-08-25
军民两用技术与产品(2020年3期)2020-04-07
电子测试(2018年10期)2018-06-26
东南大学学报(自然科学版)(2018年1期)2018-02-08
中国公共安全(2017年9期)2017-02-06