基于插电式混动汽车的自动泊车控制策略
2023-06-14 07:13:06吴光耀周升辉
汽车实用技术 2023年10期
陈 聪,刘 甲,王 帅,吴光耀,周升辉
基于插电式混动汽车的自动泊车控制策略
陈 聪1,刘 甲2,王 帅1,吴光耀1,周升辉1
(1.比亚迪汽车工业有限公司 规划院,广东 深圳 815000;2.比亚迪机电设备有限公司 轻轨交通研究院,广东 深圳 815000)
论文从汽车整车控制器的视角出发,详细阐述了基于比亚迪插电式混动汽车的自动泊车策略的逻辑控制及实现方式。在驾驶员开启自动泊车功能后,通过整车控制器判断自动泊车的进入、退出条件,通过状态机切换的方式,实现自动泊车过程中的车辆状态切换,多控制器相互协作实现自动泊车扭矩输出,控制车辆前进、后退、转向等动作,实现车辆在倒车入库、水平泊车等应用场景下的自动泊车功能,泊车完成后由驾驶员确认泊车状态操作挡位退出自动泊车。论文为自动泊车的落地量产提供思路,为自动泊车研究和发展提供参考。
自动泊车;整车控制器;插电式混动;状态控制;控制策略
随着新能源汽车行业的发展,汽车智能化逐步成为汽车配置一个重要方面,为此,许多车企推出了智能驾驶汽车。定速巡航和自适应巡航系统的定速行驶、定速/变速跟车、近距离跟车、远距离跟车、跟车刹停等功能可以大大缓解长途行车的劳累。遥控驾驶系统可以远程控制车辆前进、后退、转向,在车位狭窄无法进入车辆或者极端天气无法靠近车辆时,方便将车辆遥控到驾驶员身边。自动泊车系统能在汽车数量逐年增加、城市中停车空间日益紧张的情况下解决驾驶员停车面临的难题[1]。根据盖世汽车的调查,76%的用户在使用自动泊车过程中遇到问题,可靠性不佳,但是72%的用户表示愿意使用自动泊车,可以看出用户尝试意愿很高[2]。为满足客户的需要,目前国内整车厂小鹏汽车、威马汽车等都将记忆/自主泊车作为自家车型的卖点,这种泊车方式需要在使用前对车辆进行一次教学,车辆在固定起点与终点进行路线学习。这种泊车方式增加了一定距离范围内的无人驾驶功能,如在大型商场,用户只需在停车场的出入口或者距离电梯最近的地方下车,车辆便可以自动泊车入位,进一步提升用户停车的便捷性[3]。还有一批整车厂采用的是自动泊车辅助(Auto Parking Assit, APA),这种方式是一种半自动的辅助泊车功能,一般基于博世、百度、德赛西威、纵目科技等公司的产品开发,使用时需要驾驶员驾驶车辆到达车位附近后,用户主动打开自动泊车功能,车辆APA模块开始接管车辆控制,自主倒车入库[4]。在比亚迪汉DM-i的几款车型上配备的就是这种APA自动泊车辅助。本文基于比亚迪插电式混动车型的自动泊车功能的功能定义与实现逻辑进行介绍,以了解APA自动泊车的量产配置现状。
1 功能定义
自动泊车是一种通过探测车辆周围环境信息来找到合适的泊车位,从而控制车辆的转向和速度,使得车辆能够自主驶入泊车位的系统[5-6]。自动泊车功能随着自动驾驶级别的提升,实现的自动化水平不断提升[7]。由于自主代客泊车的自动驾驶方案成本居高不下,且控制算法不成熟,故大部分主机厂选择更为稳妥的自动泊车辅助APA。比亚迪汽车的DM-i平台多车型都搭载了博世的智能集成制动(Intergrated Power Brake, IPB)系统[8]。自动泊车功能是在用户有倒车入库需求时,用户选择开启的功能,开启后自动泊车系统规划出一条泊车路径,通过电子转向(Electric Power Steering, EPS)系统控制转向,通过IPB制动,通过整车控制器(Vehicle Control Unit, VCU)控制前进后退,实现泊车功能,如图1所示[9-11]。
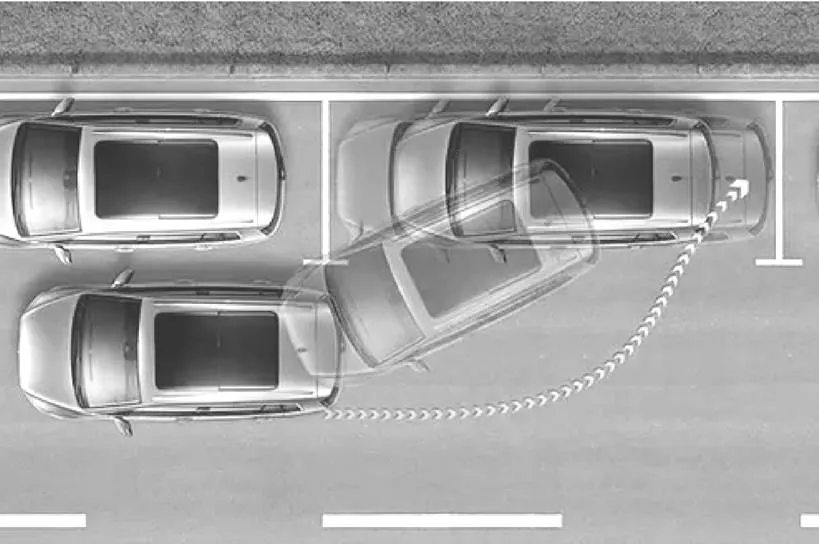
图1 自动泊车路径规划
2 自动泊车进入退出条件
用户开启自动泊车时,需要VCU实时判断整车动力系统状态,当动力系统状态满足自动泊车需求时,发送自动泊车状态为允许。同时满足条件一、条件二且离合器为脱开状态时,可以进入自动泊车状态。只有VCU判断自动泊车状态为允许时,才能响应EPS转向扭矩、IPB制动扭矩及车辆纵向控制(Vehicle Longitudinal Control, VLC)模块的驱动扭矩。
1.自动泊车进入条件一
1)OK指示灯为OK(车辆状态正常信号灯亮起);
2)挡位传感器无故障;
3)荷电状态(State Of Charge, SOC)≥10%;
4)整车最大驱动轮端扭矩≥1 000 Nm;
5)车身电子稳定程序(Electric Stability Prog- ram, ESP)标志为稳定;
6)以上条件的所有报文均通讯正常。
2.自动泊车进入条件二
1)自动泊车状态为激活;
2)制动深度≥5%;
3)油门深度=0%;
4)VCU计算车速=0 km/h;
5)实际路面模式为普通路面模式;
6)|水平倾角|≤ 8%;
7)驾驶模式为正常驾驶;
8)以上条件的所有报文均通讯正常。
3.退出条件一
1)自动泊车状态为不激活。
4.退出条件二
1)OK指示灯为OFF或OK;
2)VCU计算车速≥10 km/h;
3)ESP整车稳定标志为失稳;
4)目标路面模式非普通模式;
5)|水平倾角|≥10%;
6)SOC≤8%;
7)整车最大驱动轮端扭矩≤800 Nm;
8)挡位从倒(Reverse, R)/空(Neutral, N)/(前进Drive, D)挡变为停止(Parking, P)挡;
9)进入条件一、进入条件二中的任意报文通讯失败。退出条件满足退出条件一或者退出条件二任意一条都会导致自动泊车退出。
3 自动泊车状态控制
3.1 泊车状态切换
图2为自动泊车各状态之间的切换逻辑, VCU内部逻辑按照图2进行切换。表1为自动泊车各状态切换条件,表2为各状态保持条件。
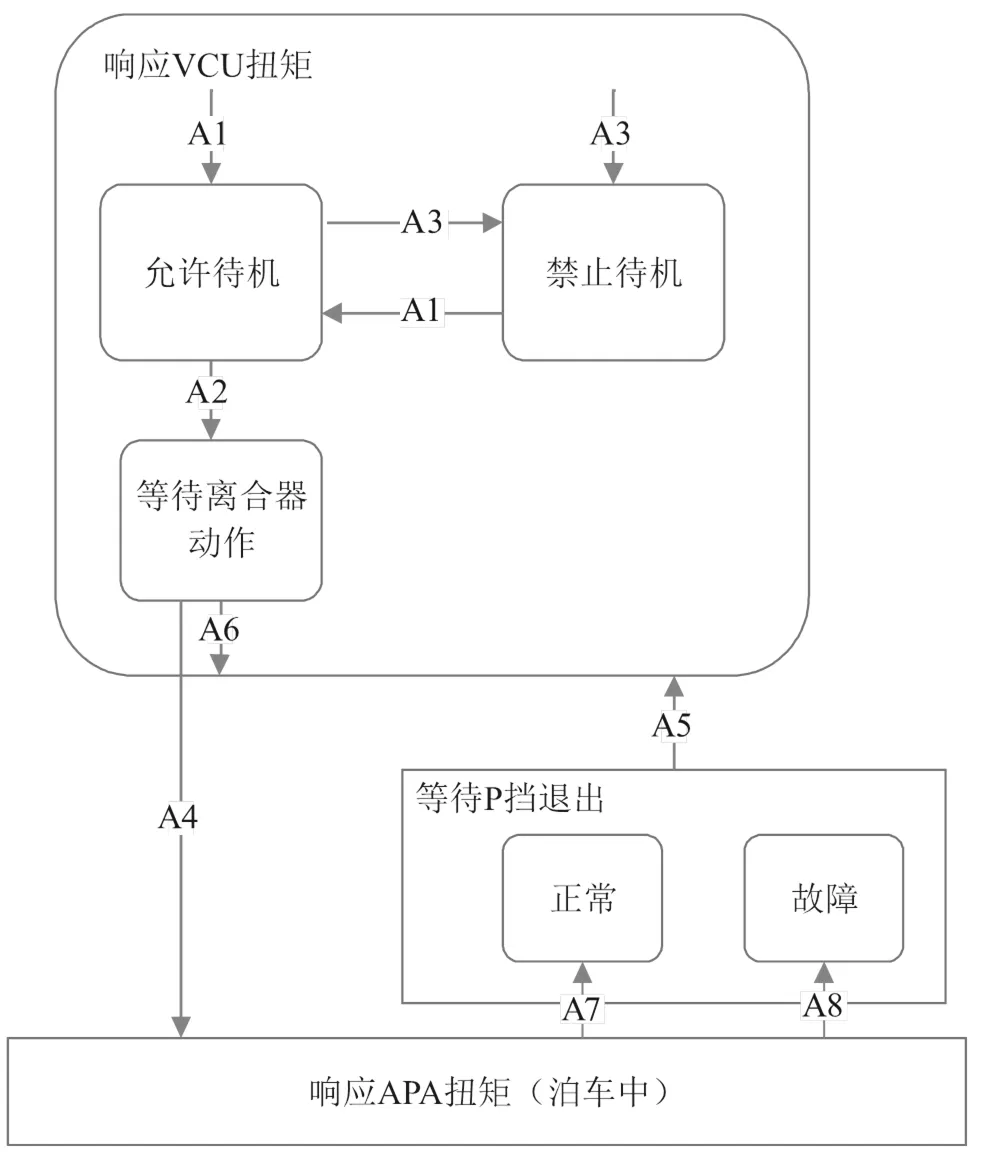
图2 自动泊车状态切换逻辑
当满足A1条件时,泊车状态进入允许待机,在此状态下自动泊车状态为允许,自动泊车脱离合标志无效,自动泊车控制标志为无效。否则满足A3进入禁止待机状态,禁止待机状态无法进入自动泊车,自动泊车状态为禁止,自动泊车脱离合标志无效,自动泊车控制标志为无效。待机状态根据是否满足A1条件可以互相切换,并保持在相应的待机状态。在允许待机状态下满足条件A2就进入了等待离合器动作状态,当前状态下自动泊车状态为允许,自动泊车脱离合标志有效,自动泊车控制标志为无效,等待离合器动作状态下满足条件A6则退出自动泊车,满足A4条件时,整车控制器将接收到的APA目标扭矩发送给电机执行,实现前进后退,响应EPS转向扭矩、IPB制动扭矩,此时实际进入了自动泊车状态,处于泊车中。在自动泊车完成后当满足条件A7进入正常等待P挡退出状态,当前状态自动泊车状态为禁止,自动泊车脱离合标志有效,自动泊车控制标志为有效。否则满足条件A8时因故障退出自动泊车,处于故障等待P挡退出,在当前状态下,自动泊车状态为泊车中,自动泊车脱离合标志有效,自动泊车控制标志为有效。在用户操作车辆挂入P挡,也即满足条件A5后,退出自动泊车,并进入下一次的自动泊车待机状态。如果在同一个上电循环,驾驶员有多次泊车请求时,也可以重新按照自动泊车逻辑进行再次判断,并成功完成自动泊车。
表1 自动泊车状态切换条件
编号状态切换条件 A1满足进入条件一 A2满足进入条件一&满足进入条件二 A3不满足进入条件一 A4离合器实际状态为分离 A5挡位为P挡 A6满足退出条件一||满足退出条件二 A7满足退出条件一 A8满足退出条件二
表2 各状态保持条件
泊车状态状态保持条件 允许待机自动泊车状态为允许自动泊车脱离合标志无效自动泊车控制标志为无效 禁止待机自动泊车状态为禁止自动泊车脱离合标志无效自动泊车控制标志为无效 等待离合器动作自动泊车状态为允许自动泊车脱离合标志有效自动泊车控制标志为无效 等待P挡退出(正常)自动泊车状态为禁止自动泊车脱离合标志有效自动泊车控制标志为有效 等待P挡退出(故障)自动泊车状态为禁止自动泊车脱离合标志有效自动泊车控制标志为有效 响应APA故障(泊车中)自动泊车状态为泊车中自动泊车脱离合标志有效自动泊车控制标志为有效
3.2 自动泊车目标扭矩
VCU收到VLC模块的扭矩请求,根据挡位决定扭矩的输出值。在输出扭矩前需判断自动泊车状态为泊车中,VLC扭矩请求值状态为有效且制动深度小于30%。如果满足以上条件,当前挡位为D挡,则直接输出VLC请求扭矩。R挡下,扭矩取反。VCU在满足自动泊车条件满足时输出目标扭矩控制实现自动泊车。
3.3 自动泊车使用
比亚迪汉DM-i的APA自动泊车系统通过 360 ° 环视摄像头与超声波探头传感器的融合,能够实现标准停车位的识别搜索,并自动控制车辆的挡位系统、转向系统、制动系统、驱动系统,实现全自动泊入车位。同时,该系统还支持水平车位泊出、自选车位功能。使用时打开全息影像,选择屏幕左侧的自动泊车功能,或者按下挡杆侧中间的「P」功能键,进入到自动泊车功能界面,满足自动泊车条件时,开始自动搜索右侧车位,也可以点击屏幕车标左侧或者打左转向灯来选择左侧车位。找到车位后,选择目标车位,点击开始泊车,松开方向盘与刹车就可以开始自动泊车了,全程伴有语音提示及车辆运行路径,直到完成泊车。而且支持自选车位,即在无法识别车位时,比亚迪给出了自选车位的泊车方式,可以通过选择自动泊车里的自选车位功能,手动拖动屏幕中的绿色方框选择需要停的位置,丰富了泊车使用场景。支持水平泊车即当车辆位于一些比较窄小的车位中难以泊出的情况下,可辅助车主进行车位 45 ° 角的水平车位泊出,但在相对宽敞的侧方位车位中,该功能会提醒路径通畅请自行泊车。行人介入泊车即出现行人或者物体靠近车辆时,系统会通过超声波雷达传感器进行报警,并且会自动刹车,当行人离开之后,泊车系统能继续执行泊车,并且顺利泊入到车位中,多种泊车方式供用户选择。
4 总结
自动泊车辅助系统可使车辆自动驶入既定车位,避免在停车中遇到刮蹭、停不进去的麻烦。自动泊车功能的实现需要多系统的协作配合,VCU作为混动车的大脑控制扭矩的输出,控制自动泊车的进入与退出,能够在车辆状态异常时紧急退出泊车,保证车辆安全。本文以比亚迪混动车型的APA配置为例,从VCU的角度出发详细介绍了自动泊车控制的进入退出条件,自动泊车状态之间的相互切换,自动泊车状态下的各控制器配合完成扭矩输出,自动泊车在实际应用场景下泊车过程中的使用方法,对了解自动泊车的控制方法具有重要意义。
[1] 颜宏滨.浅谈自动泊车辅助技术[J].芜湖职业技术学院学报,2016,18(3):54-58.
[2] 王晓彤.自动泊车系统关键技术研究[D].重庆:重庆大学,2019.
[3] 魏德奎.自动泊车系统路径规划设计与跟踪控制方法研究[D].重庆:重庆理工大学,2020.
[4] 毕野虹天.自主代课泊车系统决策与规划方法研究[D].长春:吉林大学,2019.
[5] 周莎.自主泊车系统性能评价方法[J].长安大学学报, 2020,15(3):56-59.
[6] 李韬.自动泊车系统的路径规划及跟踪[D].哈尔滨:哈尔滨工业大学,2017.
[7] 方玉杰.基于超声波检测的垂直泊车技术研究[D].合肥:合肥工业大学,2017.
[8] 屈新.一种基于回旋曲线的泊车路径规划算法及其应用[D].北京:北京理工大学,2016.
[9] 毕清磊.自动泊车辅助系统的研究与开发[D].重庆:重庆交通大学,2017.
[10] 徐磊.基于EPS的自动泊车路径规划及跟踪控制研究[D].合肥:合肥工业大学,2017.
[11] 陈世平.基于 CANoe 编程测试电动助力转向模块与自动泊车辅助模块的功能交互[J].汽车实用技术, 2022,47(7):107-110.
Automatic Parking Control Strategy Based on Plug-in Hybrid Vehicle
CHEN Cong1, LIU Jia2, WANG Shuai1, WU Guangyao1, ZHOU Shenghui1
( 1.Planning Institute, BYD Auto Industry Company Limited, Shenzhen 815000, China; 2.Light Rail Transit Research Institute, BYD Electromechanical Equipment Company Limited, Shenzhen 815000, China )
From the perspective of vehicle control unit, this paper expounds in detail the logical control and implementation of the automatic parking strategy based on BYD plug-in hybrid vehicle. After the driver turns on the automatic parking function, the entry and exit conditions of automatic parking are judged by the vehicle controller, and the vehicle state switching in the process of automatic parking is realized by the state machine switching. Multiple controllers cooperate with each other to realize the automatic parking torque output, control the vehicle forward reverse, turn and other actions to realize the automatic parking function of the vehicle in the application scenarios such as reverse warehousing and horizontal parking. After parking, the driver confirms the parking state and operates the gear to exit automatic parking. This paper provides ideas for the landing mass production of automatic parking, and provides a reference for the research and development of automatic parking.
Automatic parking; Vehicle control unit; Plug in hybrid; State control; Control strategy
U471.15
A
1671-7988(2023)10-30-04
10.16638/j.cnki.1671-7988.2023.010.006
陈聪(1990—),女,硕士,工程师,研究方向为整车控制器策略开发及软件测试,E-mail:1612571418@qq.com。
猜你喜欢
客车技术与研究(2023年6期)2023-12-19 01:21:18
汽车实用技术(2022年19期)2022-10-19 07:46:46
汽车实用技术(2022年7期)2022-04-20 11:57:58
中国煤层气(2021年5期)2021-03-02 05:53:14
汽车画刊(2020年5期)2020-10-20 05:37:35
祝您健康·文摘版(2020年3期)2020-04-09 04:47:27
军民两用技术与产品(2020年3期)2020-04-07 03:00:26
现代家长(2018年11期)2018-01-05 11:22:22
凿岩机械气动工具(2017年3期)2017-11-22 07:21:50
华东理工大学学报(自然科学版)(2015年4期)2015-12-01 04:00:50