
用于移动机器人路径规划的增强型蛇优化算法*
2023-12-13 12:12陆顺意王艺蒙李言博
传感器与微系统 2023年12期
陆顺意,何 庆,王艺蒙,李言博
(1.贵州大学大数据与信息工程学院,贵州 贵阳 550025;2.香港理工大学电子计算学系,中国 香港 999077)
0 引 言
目前,移动机器人路径规划已应用于多个领域之中,如自动驾驶、工业物流和服务业方面等。移动机器人路径规划问题作为典型的工程问题,在提升机器人定位与建图精确度方面,存在很大的探索空间。在过去的几十年里,学者们对路径规划进行了深入的研究,提出了一系列经典的路径规划方法,例如人工势场(artificial potential field,APF)法、黑猩猩优化算法(chimp optimization algorithm,ChOA)、灰狼优化(grey wolf optimization,GWO)算法、粒子群优化(particle swarm optimization,PSO)算法、被囊群算法(tunicate swarm algorithm,TSA)、鲸鱼优化算法(whale optimization algorithm,WOA)、平衡优化(equilibrium optimizer,EO)算法等[1~6]都取得了不错的效果,但仍旧存在一些缺陷。
蛇优化(shake optimization,SO)算法[7]是由Hashim F A和Hussien A G于2022年提出的一种新型的生物启发式优化算法,通过模拟蛇的觅食和繁殖行为完成寻优过程。与传统的优化算法相比,SO 算法具有原理简单、适应性好等特点。然而,SO算法同其他元启发式算法相似,普遍存在全局搜索能力差、求解精度低和收敛速度慢等缺陷。
本文提出了一种融合黄金正弦算法(golden sine algorithm,Golden-SA)[8]和莱维(Lévy)飞行[9]的SO算法(GLSOA)。首先,引入莱维飞行和非线性收敛因子,提高全局搜索效率以及平衡算法的局部开发和全局搜索能力。其次,使用局部混沌搜索策略[10],提高算法局部开发能力。此外,还引入了Golden-SA策略,指引种群位置更新,增加迭代过程中种群的多样性,提高算法收敛速度和收敛精度。
1 地图的建立
本文基于栅格地图进行GLSOA的机器人路径规划,栅格地图建模如下:构造矩阵M,定义矩阵M中0 和1 分别表示黑色栅格和白色栅格[11],构成Nx×Ny的二维栅格,模拟表示实际机器人移动环境,黑色栅格表示为障碍物所在区域,白色栅格为机器人可移动区域,如图1 所示,将第i个栅格位置hi坐标表示为(xi,yi),以栅格(x1,y1)处为起点,(x10,y10)为终点。
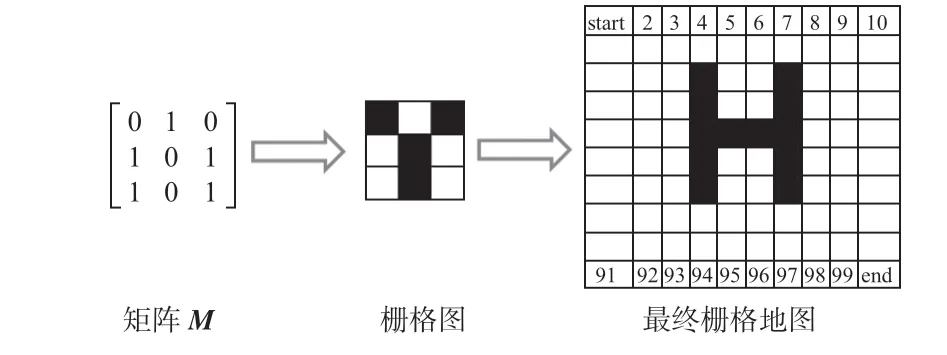
图1 栅格地图构建过程
2 GLSOA
SO的灵感来源于自然界中蛇的交配行为。如果温度低且食物充足,则会发生交配,否则蛇只会寻找食物或吃掉剩余的食物。
2.1 加入莱维飞行和非线性收敛因子
在蛇群寻找食物的全局探索阶段,通常需要对复杂的高维空间进行全局优化,以找到最优解或者近似最优解。通过引入莱维飞行机制,利用莱维飞行方向和步长的不确定性对种群位置进行扰动,提高算法的多样性,降低算法陷入局部最优的概率。同时,莱维飞行通过调整步长和跳跃方向来快速接近最优解,从而提高收敛速度。
莱维飞行的数学模型如下所示
式中 β为调整莱维飞行稳定性的重要参数,本文取1.5。
加入莱维飞行机制后,蛇群全局探索食物阶段的位置公式更新为
此外,基本SO算法的Temp收敛因子并不能提高算法收敛速度和精度,容易陷入局部最优值。针对SO 算法收敛因子下降的问题,考虑引入非线性收敛因子来改善算法的性能。同时,加入控制因子k,能控制衰减的幅度,非线性收敛因子的数学模型描述
式中t为当前迭代次数,T为最大迭代次数,Af为收敛因子的初始值,这里取1。k∈[1,10]为控制因子,k能控制A衰减幅度,k越大时收敛因子衰减越慢,反之越快。
2.2 局部混沌映射搜索策略
通过引入局部混沌映射,SO算法可以在全局搜索和局部搜索之间取得平衡,从而实现更有效的优化过程。它能够在探索性和开发性之间找到合适的权衡,既能够广泛地搜索解空间,又能够深入地探索有潜力的解。因此,将混沌映射引入SO算法可以提升算法的搜索能力和收敛性,更好地解决优化问题。
本文选取Tent混沌映射,其数学模型如下所示
式中 0 <α <1。
通过Tent混沌映射搜索策略[12],利用混沌搜索的自适应性和伪随机性,可以使算法当前解的质量和搜索过程的进展自适应地调整搜索策略。有助于在搜索空间的不同区域应用不同的搜索策略,提高搜索效率。因此,局部开发阶段的位置更新公式为
2.3 Golden-SA策略更新位置
战斗模式中,雄性与雌性之间会相互战斗以获得最佳异性,并与之交配。这样在蛇会快速向全局最优靠近,但也会造成陷入局部最优和过早收敛的现象,难以对优质解空间进行全面探索。基于此,引入Golden-SA 策略机制可以改善交配过程中的探索方式。Golden-SA 策略数学模型描述如下所示[8]
式中Xbest为全局最优位置;r1和r2为随机数,分别决定个体位置迭代的移动距离和方向;x1和x2为黄金分割系数;黄金分割数
2.4 GLSOA实现步骤
综上改进策略,GLSOA伪代码如下:
算法1 GLSOA
1)初始化参数:种群规模N、空间维度dim、最大迭代次数T等;
2)在搜索空间内随机地初始化种群;
3)将种群N均分为雄性组Nm和雌性组Nf;
4)while(t≤T)do;
5)计算雄性组Nm和雌性组Nf的适应度值;
6)找到雄性最优个体和雌性最优个体;
7)定义温度T和食物Q,引入非线性收敛因子更新Temp;
8) if(Q<0.25)then;
9) 全局探索阶段,寻找食物,加入莱维飞行扰动机制;
10) else if(T>0.6)then
11) 局部开发阶段,向食物移动,引入局部混沌映射;
12) else
13) if(rand>0.6)then
14) 进入战斗模式;
15) else
16) 进入交配模式;
17) 若选择孵化,则替换最差的雄性和雌性
18) end if
19) end if
20) 引入Golden-SA策略更新个体位置;
21)end while
22)返回全局最优解。
3 仿真实验与结果分析
仿真实验选取种群规模为30,最大迭代次数为500。为验证GLSOA在不同静态环境下机器人避障全局路径规划问题求解的寻优性能,分别选取10 ×10,30 ×30 和50 ×50的3种不同尺寸栅格环境,开展GLSOA与原SO算法和其余5个群智能算法在路径长度和寻优效率等性能提升效果实验验证。本文实验环境相关参数如表1。
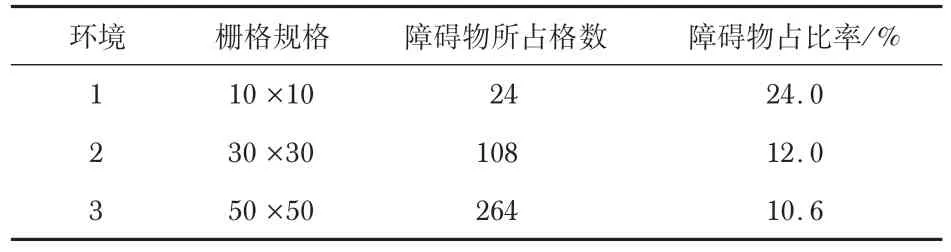
表1 环境参数设置
实验结果归纳为图2、图3和表2。
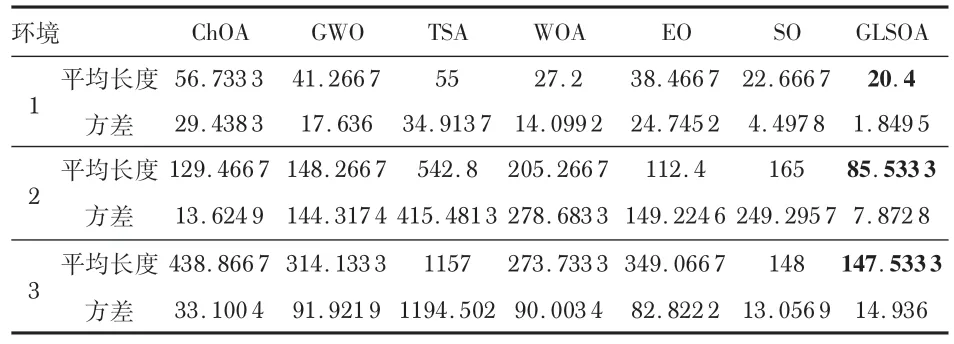
表2 基于30 次实验下不同环境中7 种算法性能对比
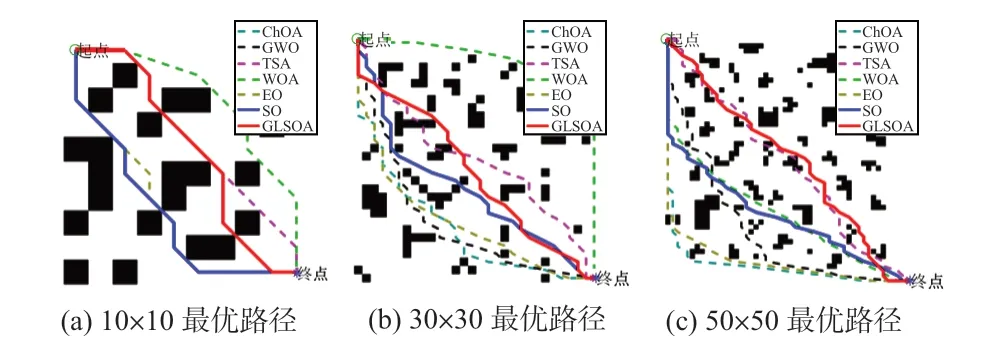
图2 7 种算法在不同规模的障碍物稀疏环境下最优路径结果
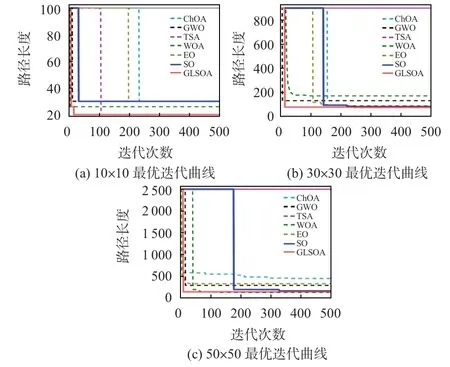
图3 7 种算法在不同规模的障碍物稀疏环境下最优迭代曲线
在图2(a)和图3(a)所示的10 ×10 地图中,本文改进的GLSOA在平均路径长度方面明显优于其他算法,相较于SO原算法长度缩短了2.27,WOA路径规划长度远远高于GLSOA,其余算法规划路径几乎一致。在图2(b)和图3(b)所示的30×30地图下,GLSOA的平均路径长度为85.533 3,较SO、EO、WOA、GWO、ChOA算法平均路径长度分别缩短79.466 7,26.866 7,119.733 4,62.733 4,43.933 4。其中,TSA路径规划失败。在图2(c)和图3(c)所示的50 ×50复杂地图中,GLSOA 算法在迭代速度和寻优精度上均优于SO原算法,最终达到优于其余所有算法的最优解。
由表2所示,GLSOA 能够在环境2 中表现出明显优势,在3个不同环境下的路径值都是最短长度,具有较好的全局搜索性能和迭代收敛能力。表明GLSOA 在机器人路径规划问题上可以获得最佳解决方案,验证了GLSOA在实际应用中的可行性和适用性。
4 结束语
本文提出了一种改进的SO 算法GLSOA,该算法弥补了原始SO算法寻优精度低、鲁棒性差、收敛速度慢等缺点。并将改进SO算法应用到栅格环境模型下的移动机器人路径规划上,仿真结果表明,融合Golden-SA和莱维飞行的GLSOA具有更好的寻优能力和鲁棒性。
猜你喜欢
国际人才交流(2022年2期)2022-11-04
数学物理学报(2022年4期)2022-08-22
数学物理学报(2022年2期)2022-04-26
电气技术(2022年1期)2022-01-26
科技创新与应用(2021年31期)2021-11-09
金桥(2018年4期)2018-09-26
中外文摘(2017年6期)2017-04-14
弹箭与制导学报(2015年1期)2015-03-11
中国卫生(2014年5期)2014-11-10
雷达学报(2014年4期)2014-04-23
