
高精度高稳定气压测高系统
2023-12-13 12:12陈旭磊陈春梅张文凯
传感器与微系统 2023年12期
陈旭磊,陈春梅,张文凯,高 杨,2
(1.西南科技大学信息工程学院,四川 绵阳 621010;2.西南科技大学微系统中心,四川 绵阳 621010)
0 引 言
近些年,无人机(unmanned aerial vehicle,UAV)在航空、摄影、救援、安防等领域取得了广泛的应用,其功能需求与应用场景亦愈发复杂,对高度信息的可靠性需求不断增加[1,2]。无人机高度信息的重要来源之一为压力传感器,因大气压强与高度呈一定规律变化,因此根据气压与高度的关系,测量大气压值便可以间接计算出高度[3]。谐振式压力传感器通过检测物体的固有频率间接测量压力,输出为谐振器的频率信号,相对于电压信号具有信号处理方便、抗噪声能力强等优点,精度和稳定性一般优于压阻式压力传感器和电容式压力传感器[4]。并且MEMS 谐振式压力传感器具备体积微小、性能稳定、制作成本低、容易进行芯片集成等特点[5]。
本文针对无人机对高度信息高精度与高稳定性的需求,使用MEMS谐振式压力传感器设计了一种气压测高系统。系统分别对传感器频率信号与温度信号设计了高精度采集模块集成于主控系统中,加入温度补偿校准气压数值。依据气压测高原理,以差分测高的方式消除周围环境对高度转换的影响,得到准确的高度信息。完成数据采集、处理、收发于一体的功能,并从高度准确性、重复性等方面进行了相关实验研究。
1 系统设计
1.1 总体方案
系统的总体方案如图1所示。传感器输出一路代表气压的频率信号,一路代表温度的电压信号用于补偿[6],传感器输出两路信号分别进入频率采集模块与温度采集模块,频率采集模块由现场可编程门阵列(field programmable gate array,FPGA)及74LVC245 构成,FPGA 具备高速性与高可靠性的特点,适合测量频率信号,并且能达到高精度的要求[7],74LVC245用于电平转换辅助检测频率的上升沿完成计数的要求;温补采集模块使用A/D7606,为16 位、8通道同步采样模数数据采集系统,内置模拟输入箝位保护、二阶抗混叠滤波器、跟踪保持放大器等,可以处理±5 V双极性输入信号。两路信号采集完成后进入数据处理模块进行补偿,数据处理模块采用STM32F407,其具备良好的扩展性与丰富的固件库,能挂载多路设备,适合多设备间的通信。显示模块负责接收数据并实时显示,同时储存数据。整个系统首先由频率采集模块采集频率数据,温度采集模块采集温度数据,通过数据处理模块计算温度补偿后的气压、高度差等信息,最终通过串口UART 或者无线WiFi 方式发送至显示模块,显示模块解析数据后将数据进行实时显示并储存。

图1 气压测高系统总体方案
1.2 信号检测
1)频率测量
频率测量使用了等精度测频法,其闸门时间不是一个固定的值,而是被测信号的整倍周期时间,且与被测信号是同步的。具体原理如下,使用FPGA 系统时钟S测量待测频率f,当检测到待测频率的上升沿后,系统时钟与待测频率同时开始计数,当待测频率经过了N个周期后,系统时钟相应也经过了n个周期,由于系统时钟频率已知,因此可以计算出待测频率的周期T=n/N×1/S。其中,N为待测频率的计数个数,S为系统时钟频率(Hz),n为系统时钟的计数个数。计算出待测频率f(Hz)为f=1/T=N·S/n。FPGA系统时钟为50 MHz,采用的MEMS 谐振式压力传感器的待测频率限定于25~35 kHz范围内,为了使系统尽量接近于1 s中测量2 次数据,取N的值为16 000,则最终计算式为f=(1.6 ×104)·(5 ×107)/n,频率检测精度达
1/50 MHz。
频率采集模块主要设计部分如图2所示,Fre输入为传感器输出的频率信号,经过74LVC245 电平转换芯片将频率信号的电平降至FPGA 芯片的引脚耐受电压范围内。FPGA根据阈值检测信号的上升沿并计数,当计数达到16 000时,输出系统时钟个数至内部串口模块,并将标志信号进行一次翻转。内部串口模块检测到标志信号翻转后,将输出时钟个数以ASCII 码的格式发送至STM32F407。FPGA 芯片使用50 MHz 的有源晶振提供系统时钟,W25Q128JVFIQ芯片作为FLASH 芯片固化程序,并具有JTAG端口用于下载调试程序。

图2 频率采集模块设计
2)温度测量
温度测量实际为电压测量,使用A/D7606 模块内置ADC进行采集,其位数为16位,可同时采样8通道,采样速率最高为200 ksps,且内置2.5 V基准电压,可精准测-5~5 V的电压,分辨率达0.15 mV。
温度采集模块主要设计部分如图3所示,Value输入为传感器输出的温度信号,A/D7606 与STM32F407 以并行接口方式通过FSMC进行数据交互,此种方式时钟是由MCU硬件产生,可以确保采集时钟的稳定性,最后将数字地与模拟地进行分割以减少干扰。采集过程配置BYTE SEL接口为并行接口输入模式;CONVST A 与CONVST B接口为全通道ADC进行同时采样;OS0、OS1、OS2 接口为无过采样倍率;REF SELECT 接口接高电平使用内部基准电压;RANGE 接口设置电压范围为-5~5 V。通过BUSY信号电平状态监视ADC启动与完成等状态以设置中断触发,当有中断产生时通过片选信号与信号输出采样结果,并将结果转化为电压数据,得到数据后清除中断进行下一次采样,进而完成循环采集温度的过程。
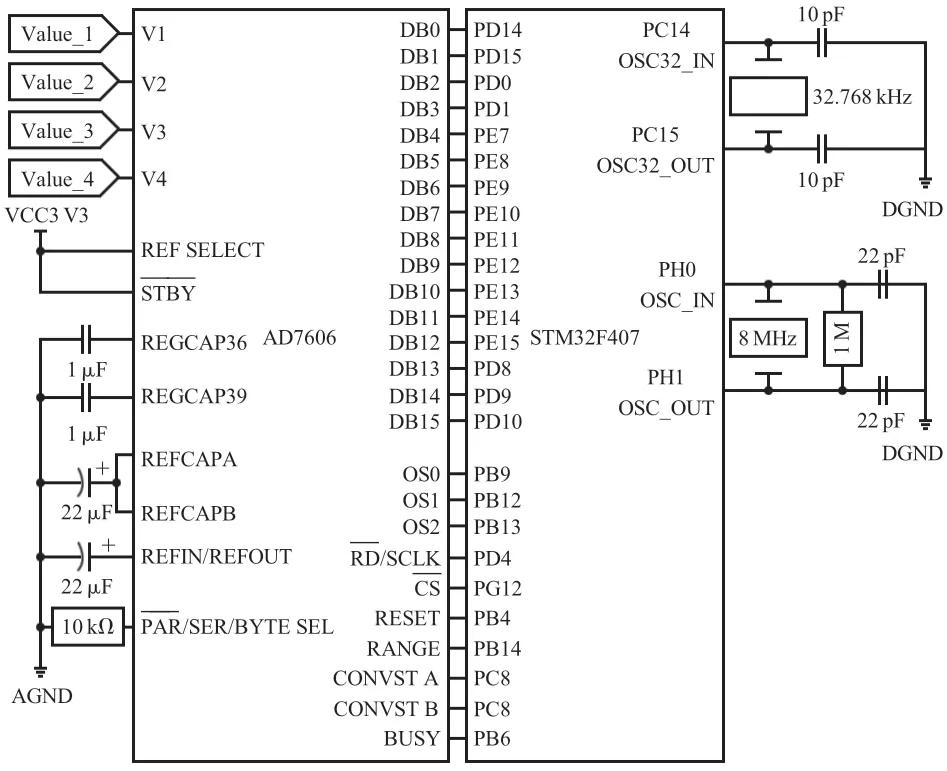
图3 温度采集模块设计
1.3 数据处理
1)温度补偿
由于半导体材料对自身温度非常敏感,加上传感器自身存在的非线性问题,需要采取措施进行温漂补偿和非线性校正[8,9]。本文使用的MEMS谐振式压力传感器芯片内有一只用于温度补偿的温度传感器,采用了以下的多项式拟合用于温度补偿
式中Pressure为气压值(绝压,单位为kPa);K为每只传感器对应的系数补偿表,由传感器制造者提供;i取0~4,j取0~3;x=频率输出(Hz)-x′,y=电压输出(mV)-y′。
2)高度计算
在地球重力场中,大气压强与高度呈一定规律变化,因此根据气压与高度的关系可以间接计算出高度。然而气压会受多种因素如大气温度、纬度、季节等影响,这种物理特性导致直接计算的海拔高度误差比较大。差分气压测高方式可以有效地解决这一问题:一定区域内的大气运动、变化规律等物理特性比较接近,因此,可以利用区域内已经测定、校准好的基准点气压、温度值与待测点的气压、温度值做差分校正,从而获取基准点和待测点间的精确高度差[10~12]。
当一空气块在保持静力平衡状态,水平方向上各面受力相互抵消的条件下,它在垂直方向上所受向上净压力(上、下压力差)必为重力所平衡,即为静力平衡方程
式中P为当前大气压强,Pa;z为海拔高度,m;ρ为大气空气密度,kg/m3;gn为重力加速度,m/s2。如果暂不考虑湿度对本地气压的影响,只考虑温度对气压影响的前提下,不含任何水蒸气的绝对干燥空气的气体状态方程为
式中P为当前大气压强,Pa;ρ 为大气空气密度,kg/m3;T为待测点的空气热力学温度,K;Rd取287.05 J/(kg·K)为干燥空气的气体常数。将式(3)代入式(2)中,对高度从h0到h积分,可以得到气压与高度的关系式
式中P为待测点的大气压强,Pa;P0为参考点的大气压强,Pa;h为待测点的海拔高度值,m;h0为参考点的海拔高度值,m。对上式进行变换得
由于高度与大气温度的关系较为复杂,简单的函数关系难以表示,所以对式(5)求积分较为困难。因此,假设在大气压强值相同时,温度也相同,令Tm为待测点与参考点之间大气层的平均温度,代入进行积分可得
将华氏温度转换为摄氏温度,利用换底公式转换可得
式中Tm(℃)可由参考点温度值与待测点温度值进行平均得到。Rd取常数287.05 J/(kg·K),gn取常数9.8 m/s2,最终高度差只需获取参考点的温度、气压数据与待测点的温度、气压数据4个未知量即可得到。
3)显示模块设计
显示模块用于接收主控模块传输的数据,并且在界面中显示这些数据的实时变化。模块采用LabVIEW完成,软件运行后首先对所有数据区进行初始化,读取下位机传递来的数据,读取到数据后对数据位数及帧头进行判断,如果无误则对数据进行解析,得到频率、电压、气压等数据。根据气压数据计算出高度,并且通过图表等方式将数据显示出,最终将数据存储至日志文件里,便于后期统计查看。
2 实验验证
根据以上软硬件设计,开发并搭建了实验平台。除本文设计所用的MEMS 谐振式压力传感器外,额外加入了MS5611压阻式压力传感器用作对照实验。平台中温湿度传感器用于检测环境温度辅助差分气压测高,与上位机通信使用无线WiFi的方式,整个系统由主控板采集MEMS谐振式压力传感器与MS5611 压力传感器的信号,将信号转换为气压数据并进行补偿,最终将气压转换为高度信息通过无线方式发送至上位机实时显示。
为了测试系统的准确度及稳定性,分别在1 d内,室内环境下,搭建固定高度为25,50,75,100 cm的平台,以及选取西南科大的东7A楼的1 层和8 层,在同一位置、同一高度进行了多次高度差测量。首先,将设备放置在平台底层位置进行30 s的静置,再将设备移动至平台顶层的位置进行30 s的静置,静置期间记录时间、温度、气压等值。在1 d内不同时刻进行多组实验,保持每次设备放置的位置与之前一致,得到完整的实验数据。数据收集完成后,抽取其中20/12组,使用差分气压测高方式求出高度差,按照时间顺序以每栋楼的测试时间计次为横坐标,每次测得的高度差为纵坐标,绘制所有数据如图4所示。

图4 各实验环境下同一位置和高度的高度差测量情况
根据每组测试结果进行分析,对高度差求平均值,标准偏差(standard deviation,SD),相对标准偏差(relative standard deviation,RSD),结果如表1所示。
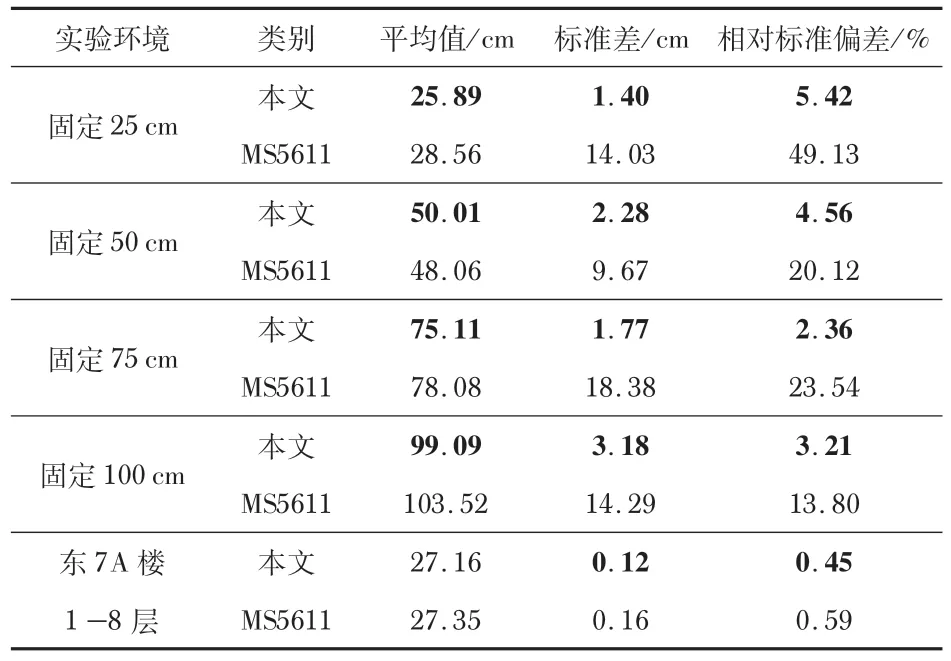
表1 高度测试结果的相对标准偏差
从图4和表1中可以看出,在距离较短的测量中,本文系统的平均值更接近于真实值,每个时间点测得的高度差基本相等,且标准差与相对标准偏差明显优于MS5611,准确性、稳定性与重复性较好,误差在厘米(cm)级范围内。
在距离相对较长的测量中,两者的平均值相差不大,并无异常数据,相对标准偏差均小于1%,而本文系统的标准差与相对标准偏差相比之下更小,重复性与稳定性更为优异。
3 结 论
本文首先对当前无人机应用背景下的高度计需求进行了深入分析,指出稳定、准确可靠是其重要指标。为此,本文使用自主设计小型功能主控板与MEMS 谐振式压力传感器设计了一种气压测高系统,将频率测量、温补计算集成于一体,实现数据采集、计算、补偿、传输等功能,完成了实时气压检测与高度转换。同时,通过远端上位机程序可实时监控数据变化并对数据进行可视化显示与分析。通过大量的实验分析表明,本文系统测高数据准确、稳定、可靠,能适应不同的外界环境。在无人机应急救援、消防救灾以及环境监测等场合具有较好的应用价值。
猜你喜欢
幼儿画刊(2021年5期)2021-12-02
数学小灵通·3-4年级(2021年9期)2021-10-12
小学生学习指导(低年级)(2020年10期)2020-11-09
天天爱科学(2020年6期)2020-09-10
模具制造(2019年4期)2019-06-24
数学大王·中高年级(2017年2期)2017-02-08
美术文献(2016年6期)2016-11-10
学苑创造·A版(2016年4期)2016-04-16
浙江大学学报(工学版)(2015年7期)2015-03-01
全球定位系统(2015年4期)2015-02-28
