非平面2自由度上肢康复外骨骼设计与分析
2023-12-08 02:38汪步云
安徽工程大学学报 2023年4期
葛 攀,张 振,陈 玉,汪步云
(1.安徽工程大学 机械工程学院,安徽 芜湖 241000;2.电气传动与控制安徽省重点实验室,安徽 芜湖 241000)
上肢的运动机能在日常的工作与生活中起着重要作用[1],但大量的运动损伤和神经系统疾病会影响上肢的运动机能,降低患者的生活质量。这种上肢机能的损伤可能发生在脊髓损伤、中风或骨折之后。临床研究证实,人体的中枢神经组织损伤不可再生,但具有高度的可塑性,神经损伤引起的上肢运动机能障碍可通过重复的康复训练进行恢复[2],是一个运动重新学习的过程。在缓慢的恢复过程中,患者需要康复治疗师进行长时间协助。然而,随着需要重复性运动康复的患者数量增加,导致了康复治疗师的数量不足,为了减轻这种负担并为患者提供稳定的康复过程,借助上肢康复机器人是协助上肢机能损伤患者恢复运动机能的有效途径。
随着上肢康复机器人技术的发展以及患者对康复需求的提高,上肢康复机器人按照设备康复形式的不同可分为两种类型[3]。第一类康复机器人采用的是末端牵引式,另一类采用的是外骨骼式。末端牵引式直接作用于上肢的末端,如手握式和腕部固定式,往往是为了康复训练而设计的。早期的末端牵引式机器人是由麻省理工学院的krebs等[4]开发的MIT-MANUS,该装置采用了平面SCARA 机器人驱动上肢的肩膀和肘部,能够实现2自由度平面空间内的运动康复。张磊刚等[5]设计了一款双侧7自由度上肢康复机器人。机器人的主要康复交互机构由两个7自由度机械臂和末端牵引手柄等组件构成,可以帮助患者手臂实现三维空间的训练,且可以根据不同康复时期的患者进行按需辅助康复。夏鹏鹏等[6]针对牵引式上肢康复训练机器人结构复杂、柔顺性和安全性不足的问题,设计了一种三维空间末端牵引式上肢康复训练机器人。末端牵引式康复机器人只能保证上肢在辅助力的牵引下进行康复训练,不能准确控制上肢所有关节的运动,且其设计中采用的机械臂以及整个控制组件的成本过高。外骨骼机器人是一种人机交互系统,其关节和链接方式与人体的关节和链接方式相对应,随着其在康复医学和虚拟现实中的应用,外骨骼为协助患者进行日常活动提供了更多可能[7]。上肢外骨骼具有与人类上肢生物结构类似的机械结构,可以通过改变连杆的长度以适应不同的骨架,并通过上肢与机械关节的匹配实现关节驱动扭矩的传递。外骨骼附着在手臂上有许多优点,相似的工作空间避免了奇点,以及工作空间上驱动力的一对一映射[8]。外骨骼机器人一般包含更多的传感器,可以保证外骨骼在使用时的安全性,还能向患者和医生提供更多信息,使医生能够更好地安排整个康复训练的进展。Copaci等[9]设计了一种基于SMA 驱动的2自由度肘关节康复外骨骼,该外骨骼将肘关节简化为机械球关节,并使用了基于形状记忆合金的生物启发致动器。翟宇毅等[10]针对一些外骨骼机器人体积大、舒适性差的问题,基于轻量化、人体工程学等原则,设计了一种3自由度柔性穿戴式机器人。刘志辉等[11]为了解决外骨骼上肢康复机器人自由度受限的问题,建立了上肢运动关节的简化模型,对比人体上肢关节的运动机理,提出了一种改进的7自由度外骨骼上肢康复机器人。上肢康复机器人的主要功能是为患者提供康复训练,协助患者进行日常的活动。然而,对于末端牵引式康复训练装置和外骨骼式康复训练装置来说,其研究只集中在某一方面。实际上,对于上肢康复机器人来说,其设计必须考虑将康复训练与辅助功能相结合,使用较少的自由度实现尽可能大范围的工作空间。
为满足患者对康复训练以及生活辅助的需求,针对当前低自由度上肢康复外骨骼康复训练空间有限的问题,本研究设计了一种非平面2自由度上肢康复外骨骼,用于肘关节的屈曲/伸展和肩关节的内/外旋转。其中肘关节采用柔性设计,避免了康复过程中机械关节与手臂肘关节产生轴偏差使患者产生不适感。
1 上肢外骨骼结构设计
人体上肢结构如图1所示。上肢的运动是极其复杂的,主要的两个活动关节为肩关节和肘关节[12]。肩关节受到骨骼的约束比较少,主要靠肩部的肌肉群约束,因此肩关节的运动通常简化为3自由度:前屈/后伸、外展/内收和旋内/旋外。肘关节是一个铰链关节,其轴移运动具有复杂的轨迹,旋转轴会产生轻微的位移,用于进行屈/伸运动,运动范围如表1所示。依据人体上肢结构的运动特点,确定了上肢康复外骨骼的设计方案,以肩部的旋内/旋外和肘部的屈曲/伸展为康复姿态。
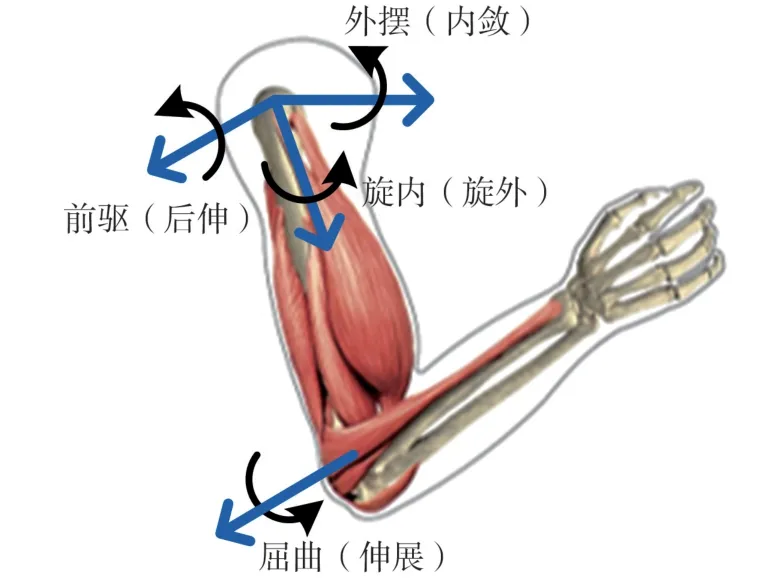
图1 人体上肢结构

表1 手臂主要关节活动范围
上肢康复外骨骼主要由底座、大臂托架、柔性连接件、过渡连接件和小臂托架组成,如图2所示。在康复过程中,大臂和小臂放置在托架内,通过紧固带和垫板进行固定,托架的内侧设置有垫层,增加患者的舒适性。由于肩部的康复姿态为旋内/旋外,整个大臂的大部分重量经大臂托架和底座支撑抵消,康复动作的执行依靠底座上安装的舵机带动。肘部的屈伸通过设置在大臂托架两侧的舵机带动,增加运行的稳定性,可在安全角度内往复循环,满足上肢康复的使用要求。

图2 上肢康复外骨骼整体结构图
1.1 柔性肘关节设计
外骨骼的肘关节采用柔性连接件,其弹性结构对称分布,材质为铝合金,为了补偿肘关节在屈伸过程中与外骨骼之间的轴偏差,其在平面内具有3自由度,通过连接轴和轴承与过渡连接件连接,采取被动调节的方式,结构更加紧凑,柔性连接件结构如图3所示。

图3 柔性连接件结构
通过有限元软件校核柔性模块,以验证其结构的性能,X 和Y 方向施加的力大小均为30 N[13],当模块在X 方向受到力时,会产生位移和应变,柔性模块X 方向的位移量为2.319 8 mm,最大应变值为0.002 617,如图4所示;当模块在Y 方向受到力时,柔性模块Y 方向的位移量为2.317 4 mm,最大应变值为0.002 617 1,如图5所示。柔性模块的X 方向和Y 方向的位移量均为2.3 mm,能够在一定程度上被动补偿机械关节与手臂肘关节产生的轴偏差,X 方向和Y 方向的最大应变值处于安全范围内。
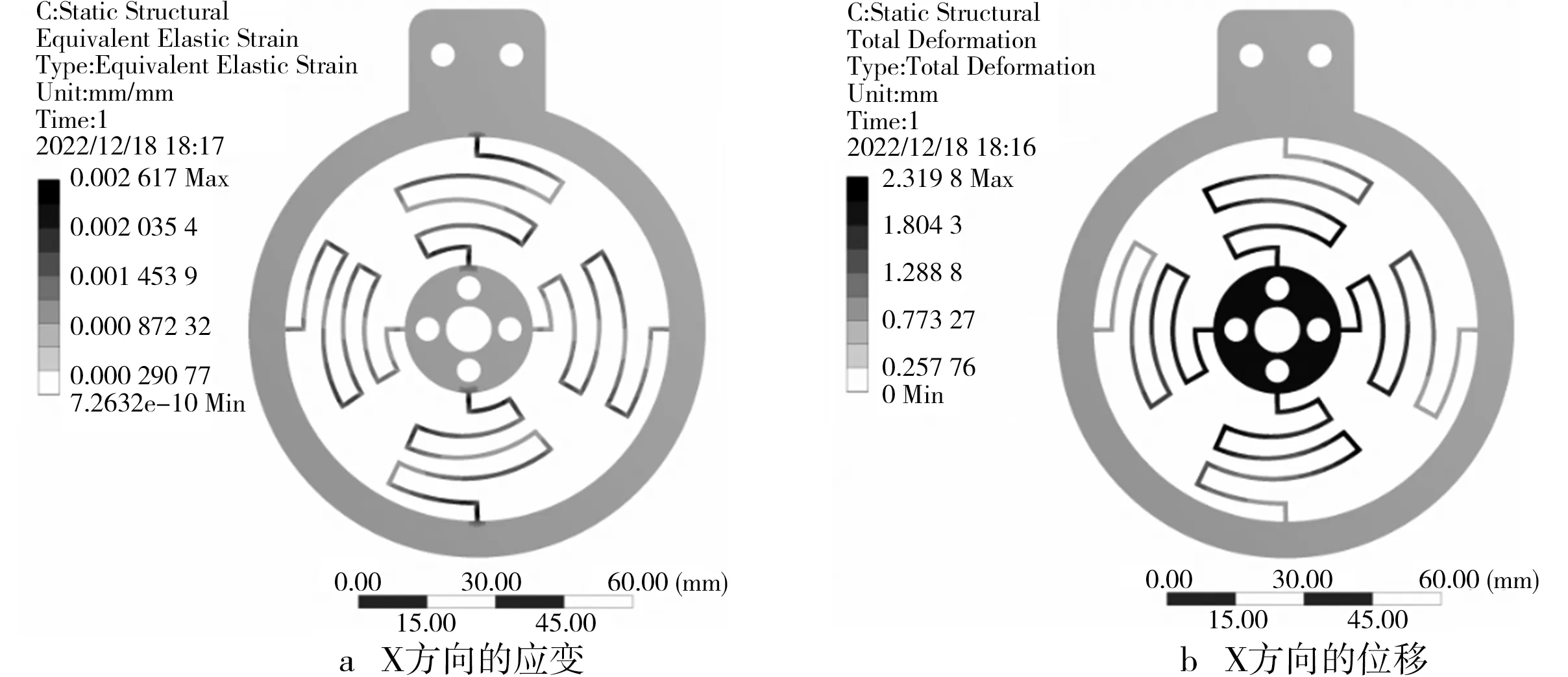
图4 X 方向的应变和位移

图5 Y 方向的应变和位移
1.2 过渡连接件设计
根据小臂托架和柔性肘关节的接头方式确定过渡连接件的结构。过渡连接件的作用是连接小臂托架和柔性肘关节,在设计中充分考虑到外骨骼的轻量化设计,以及过渡连接件的制作成本,通过有限元软件对比了过渡连接件在位移方面的分析结果,受力大小均为30 N,连接件位移分析云图如图6 所示。连接件的材料分别为ABS、钢和铝,三种材料均满足强度要求。在这种情况下,ABS是一种很好的材料,其重量更轻且价格更经济。

图6 连接件位移分析云图
2 上肢外骨骼运动学分析
2.1 运动学分析
为了进一步说明非平面2自由度上肢康复外骨骼的安全性,采用D-H 分析法,对外骨骼进行运动学分析。首先建立外骨骼的机构D-H 坐标系,具体如图7所示,外骨骼D-H 参数如表2所示。

图7 上肢康复外骨骼 坐标

表2 上肢康复外骨骼D-H 参数
上肢康复外骨骼D-H 坐标系中相邻坐标系第i杆相对于i-1杆的位姿矩阵为Ti:
式中,sθi=sinθi,sαi=sinαi,cαi=cosαi,cθi=cosθi。根据式(1)和表2所示参数,可求得各连杆的变换矩阵:
则末端坐标系与基坐标系之间的变换矩阵02T如式(4)所示:
为了验证运动学方程,在M ATLAB中,以θ1=90°、θ2=0°为初始值,得到外骨骼仿真结果,具体如图8所示,验证了模型的正确性。

图8 仿真结果
2.2 工作空间分析
通过工作空间分析能够确定康复装置的可达康复范围,在实际任务的应用中可以根据康复装置的工作空间制定其康复轨迹。本研究选用蒙特卡罗法对工作空间进行求解,根据非平面2自由度机械臂的结构参数和关节变化范围,利用MATLAB机器人工具箱软件完成其工作空间分析,取θ1、θ2的角度变化范围为0°~90°内的随机值带入,当N=30 000次可得非平面2自由度机械臂的工作空间范围,如图9所示。由图9可以看出,其工作空间为连续的四分之一球面,代表机械臂的活动范围满足设计要求。

图9 基于蒙特卡罗法的工作空间分析
3 康复机器人轨迹规划仿真
患者的整个康复过程都需要外骨骼协助完成康复动作,而康复动作是外骨骼在可达工作空间内通过一定轨迹制定。在MATLAB中可以进行外骨骼的末端轨迹制定,并能显示各个运动关节的运动角度、角速度以及角加速度变化图,这对分析外骨骼末端运动的稳定性以及外骨骼的使用安全性有很重要的参考意义。
根据所设计的2自由度外骨骼,设定其起始关节变量q0=[0,0]和终点关节变量通过MATLAB进行运动仿真,当外骨骼末端从初始点运动到终止点,外骨骼末端位置图如图10所示。各运动关节在外骨骼运动中的角位移、角速度和角加速度曲线如图11所示。由图11可以看出,两个关节动作完成时间均为5 s,第1关节即肘关节的屈伸运动,从初始位置运动到45°;第2关节即肩关节的内外旋转运动,从初始位置运动到30°。第1关节和第2关节动作同时完成,肘关节和肩关节的初始速度和终止速度均为0,初始点和终止点的加速度均为0,整个运动过程中曲线平滑连续无突变点,且符合康复外骨骼运动的稳定性和安全性要求。
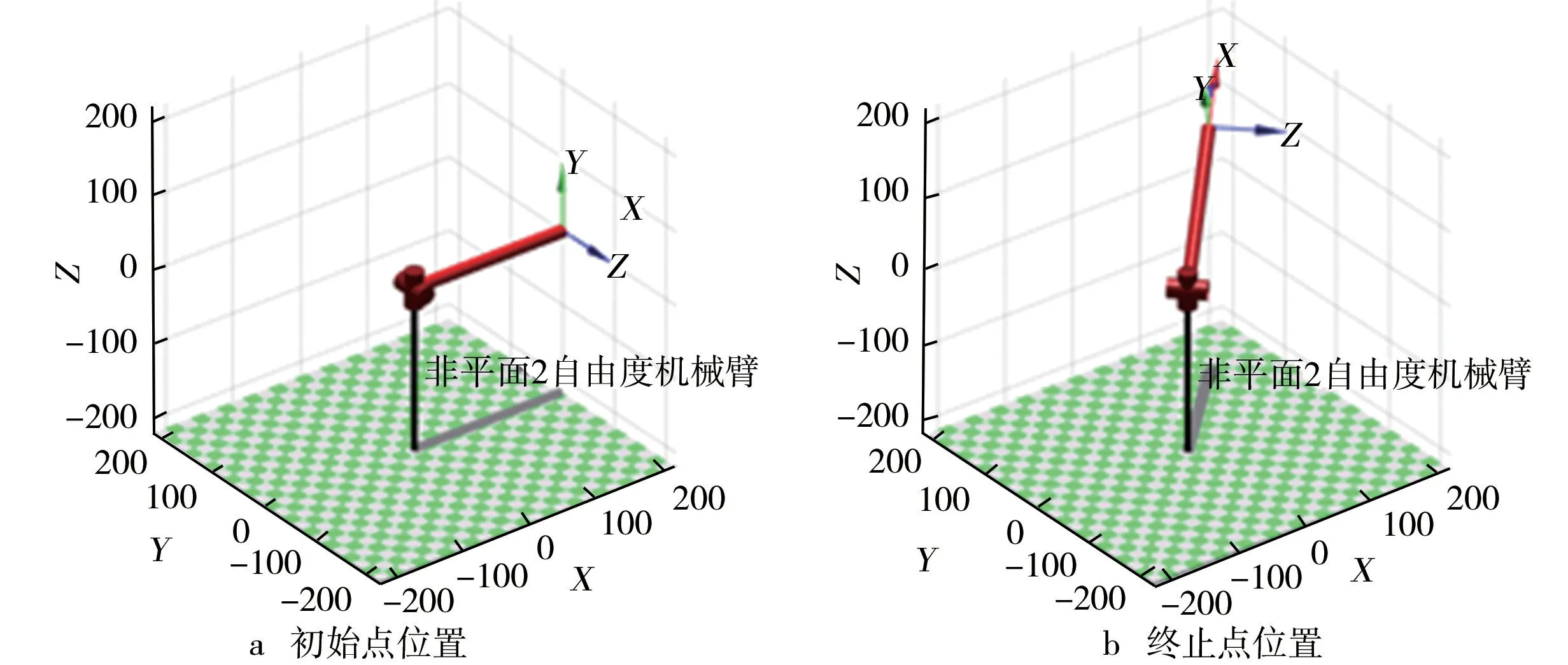
图10 外骨骼末端位置图

图11 角位移、角速度和角加速度曲线图
4 结论
本文针对上肢康复患者对康复训练以及生活辅助的需求,设计了一种非平面2自由度上肢康复外骨骼装置。针对肘部的运动设计了柔性连接件,对装置的主要连接件进行了有限元分析,验证了其使用强度,确保了装置结构设计的可行性。通过对上肢康复外骨骼装置进行运动学分析及仿真,装置的各个运动关节能够在安全角度范围内进行运动,验证了模型的合理性。由装置的工作空间及轨迹规划仿真结果可以看出,非平面2自由度上肢康复外骨骼装置能够以低自由度实现连续的四分之一球面训练空间,且运动过程平稳。
猜你喜欢
军事文摘(2024年6期)2024-02-29
小哥白尼(野生动物)(2021年12期)2021-03-29
组合机床与自动化加工技术(2021年3期)2021-03-26
中华肩肘外科电子杂志(2020年1期)2020-12-20
高师理科学刊(2020年2期)2020-11-26
中华肩肘外科电子杂志(2019年4期)2019-01-03
汽车文摘(2016年6期)2016-12-07
中华肩肘外科电子杂志(2016年3期)2016-01-23
铁道科学与工程学报(2015年4期)2015-12-24
发明与创新(2015年25期)2015-02-27